You might also like
- SYNC - DNP3 Slave Interface User Manual - Rev1.0.2 - ModDocument34 pagesSYNC - DNP3 Slave Interface User Manual - Rev1.0.2 - ModsyclonNo ratings yet
- PowerFlex 4 Class Multi-Drive Control On EtherNetIP PDFDocument8 pagesPowerFlex 4 Class Multi-Drive Control On EtherNetIP PDFMaria TzagarakiNo ratings yet
- Abb Sattcon ComliDocument17 pagesAbb Sattcon Comlilgrome73No ratings yet
- Is5 - iP5A - Iv5 Profibus-DP (10310000384)Document32 pagesIs5 - iP5A - Iv5 Profibus-DP (10310000384)mahyarhaghgoo1No ratings yet
- Technote DWDM 00 - 2Document12 pagesTechnote DWDM 00 - 2integragroupinfoNo ratings yet
- Samsung Eletornics Logic and I/O Products SPC-10/N70Plus/N70/700Plus Series Application NoteDocument12 pagesSamsung Eletornics Logic and I/O Products SPC-10/N70Plus/N70/700Plus Series Application NoterticonaNo ratings yet
- Vanguard Managed Solutions: Vanguard Applications Ware IP and LAN Feature Protocols Ethernet Basics GuideDocument18 pagesVanguard Managed Solutions: Vanguard Applications Ware IP and LAN Feature Protocols Ethernet Basics GuidepremortemNo ratings yet
- DP S7300Document26 pagesDP S7300Rebe Patalinghug BonghanoyNo ratings yet
- Rocket Io Aurora Core For Xilinx Virtex II Pro BoardDocument10 pagesRocket Io Aurora Core For Xilinx Virtex II Pro BoardMichael MefenzaNo ratings yet
- Atv32 Communication Parameters A1.2ie03Document33 pagesAtv32 Communication Parameters A1.2ie03CarlosOtinianoNo ratings yet
- D4E1, D8E1: 4-And 8-Port E1 Interface ModulesDocument64 pagesD4E1, D8E1: 4-And 8-Port E1 Interface ModulesjsdoodnathNo ratings yet
- Idea User's Guide - AacDocument118 pagesIdea User's Guide - AacSaptarshi Chatterjee100% (2)
- Brocade SilkwormDocument76 pagesBrocade Silkwormvsrv66No ratings yet
- ATV600 Communication Parameters EAV64332 V1.5Document41 pagesATV600 Communication Parameters EAV64332 V1.5QR JcNo ratings yet
- AlfaOBD HelpDocument19 pagesAlfaOBD HelpAhmed ShaabanNo ratings yet
- Hillstone All Series Device Troubleshooting and Debug GuideDocument134 pagesHillstone All Series Device Troubleshooting and Debug GuideWAMS FILE100% (1)
- 674 675 684 685 Profibus Application Note PDFDocument35 pages674 675 684 685 Profibus Application Note PDFregfergNo ratings yet
- Ccnpv6 Tshoot Sba Stud ExamDocument9 pagesCcnpv6 Tshoot Sba Stud ExamAtilio Alexander100% (1)
- ATV61 71 Profibus PDV0 DPV1 Diagnostic of Communication TroubleDocument15 pagesATV61 71 Profibus PDV0 DPV1 Diagnostic of Communication TroubleLe Hoai Nhat PhuongNo ratings yet
- RSView32 Data Source OptionsDocument5 pagesRSView32 Data Source OptionsneoflashNo ratings yet
- ATV600 Communication Parameters EAV64332 V1.3Document41 pagesATV600 Communication Parameters EAV64332 V1.3Ricardo FonsecaNo ratings yet
- CCNA2 Final Exam 2013 - Version1 - ZeuxidisDocument16 pagesCCNA2 Final Exam 2013 - Version1 - ZeuxidisVelito GujamoNo ratings yet
- Brocade Product Training: Diagnostics and TroubleshootingDocument61 pagesBrocade Product Training: Diagnostics and TroubleshootingSuresh Manikantan NagarajanNo ratings yet
- Interface Protocol for DC DrivesDocument27 pagesInterface Protocol for DC DrivesmpeneloNo ratings yet
- 2.2.2.6 Lab - Configure CDP and LLDPDocument10 pages2.2.2.6 Lab - Configure CDP and LLDPAnonymous XQC6Rw0% (2)
- Nap 101Document11 pagesNap 101Jorge TenorioNo ratings yet
- TurboCNC v4Document89 pagesTurboCNC v4John RobieNo ratings yet
- Module D ZS4200 R4.0 Operator V1.01Document31 pagesModule D ZS4200 R4.0 Operator V1.01stefan63byNo ratings yet
- ELM 327 Mini - User-Manual-1878590Document4 pagesELM 327 Mini - User-Manual-1878590JohnPratchiosNo ratings yet
- Modbus Protocol Implementation NOJA-508Document15 pagesModbus Protocol Implementation NOJA-508JoseSanchez50% (2)
- (D0301) Profibus Quick Startup Guide V1.0Document43 pages(D0301) Profibus Quick Startup Guide V1.0mr3478No ratings yet
- 25SL MkII Manual PDFDocument89 pages25SL MkII Manual PDFtresichrisNo ratings yet
- Take Assessment - TSHOOT Final Exam - CCNP Tshoot: Troubleshooting and Maintaining Cisco IP Networks (Version 6.0) - Answers - 2012 - 2013Document24 pagesTake Assessment - TSHOOT Final Exam - CCNP Tshoot: Troubleshooting and Maintaining Cisco IP Networks (Version 6.0) - Answers - 2012 - 2013rabbycakeNo ratings yet
- PROLINK H5004N ADSL - PsDocument68 pagesPROLINK H5004N ADSL - PsRuel BalabisNo ratings yet
- DM-4 Gas, TCP-IP Modbus Communication Manual, 4189340656 UKDocument28 pagesDM-4 Gas, TCP-IP Modbus Communication Manual, 4189340656 UKmohamedwalyNo ratings yet
- 4 7362 Mini OLT Turn Up ProcedureDocument38 pages4 7362 Mini OLT Turn Up Procedureosite100% (2)
- Controlling A PowerFlex755 Drive On EtherNet With A MicroLogix1400 ControllerDocument6 pagesControlling A PowerFlex755 Drive On EtherNet With A MicroLogix1400 ControllerLucas Sandes TeixeiraNo ratings yet
- 7mode Transition Tool 33 Release NotesDocument13 pages7mode Transition Tool 33 Release Notesserkan887_790218525No ratings yet
- PLC Siemens25Document20 pagesPLC Siemens25chokamNo ratings yet
- Type 7 Encoder Installation and Operation InstructionsDocument16 pagesType 7 Encoder Installation and Operation InstructionstarcisseNo ratings yet
- ITGN235 Lab 5Document14 pagesITGN235 Lab 5Muhammad hamzaNo ratings yet
- EWAN Final Exam CCNA 4 4.0 2012 100% Take Assessment – EWAN Final Exam – CCNA Exploration: Accessing the WAN (Version 4.0) – Answers – 2011 – 2012 - Get IT Certification CCNA 4.0 - CCNP 6.0 2013 100% FREEDocument21 pagesEWAN Final Exam CCNA 4 4.0 2012 100% Take Assessment – EWAN Final Exam – CCNA Exploration: Accessing the WAN (Version 4.0) – Answers – 2011 – 2012 - Get IT Certification CCNA 4.0 - CCNP 6.0 2013 100% FREEpinyat100% (1)
- Lab 4 1 6Document6 pagesLab 4 1 6HamzaSpahijaNo ratings yet
- DRS4 Manual Rev40Document36 pagesDRS4 Manual Rev40МилицаБајићNo ratings yet
- PowerFlex 4 ModBus-RTU Application NoteDocument11 pagesPowerFlex 4 ModBus-RTU Application NoteMarisol SalvadorNo ratings yet
- Simatic s7-1200 Easy Book - Profinet and Profibus InstructionsDocument1 pageSimatic s7-1200 Easy Book - Profinet and Profibus InstructionsHerick509No ratings yet
- Cisco RV0xx Series VPN Routers (Administration Guide)Document175 pagesCisco RV0xx Series VPN Routers (Administration Guide)Oliver QuinteroNo ratings yet
- ML1400 and PF Over EnetDocument8 pagesML1400 and PF Over EnetgonzaNo ratings yet
- 9105 Multi IgDocument112 pages9105 Multi IgGökhan ÖnalNo ratings yet
- Developers GuideDocument100 pagesDevelopers GuideRobson SpricigoNo ratings yet
- Manual RFID FastTagReaderDocument40 pagesManual RFID FastTagReaderMARIGANTI SRINIVASULUNo ratings yet
- Redline Communications An-50e ReviewDocument9 pagesRedline Communications An-50e ReviewSynworks Development GroupNo ratings yet
- Torque Tool Ethernet ManualDocument31 pagesTorque Tool Ethernet Manualovidiu_fzeNo ratings yet
- Configuration Guide - IDirect 4.3Document9 pagesConfiguration Guide - IDirect 4.3MohaTraoNo ratings yet
- CCSI Test PaperDocument53 pagesCCSI Test PaperAbdullah AkkamNo ratings yet
- WAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksFrom EverandWAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksNo ratings yet
- LEARN MPLS FROM SCRATCH PART-B: A Beginners guide to next level of networkingFrom EverandLEARN MPLS FROM SCRATCH PART-B: A Beginners guide to next level of networkingNo ratings yet
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- LG wd-80480 wd-12480 wd-12490 wd-10480 wd-10490 wd-80490 SMDocument35 pagesLG wd-80480 wd-12480 wd-12490 wd-10480 wd-10490 wd-80490 SMuongquocvuNo ratings yet
- Titan Viper User ManualDocument28 pagesTitan Viper User ManualPierce JamiesonNo ratings yet
- M100702E MAI Memory Upgrade For Fanuc 02 PDFDocument22 pagesM100702E MAI Memory Upgrade For Fanuc 02 PDFSelvedin GudicNo ratings yet
- Five-Axis Offline Motion Controller Instruction Manual: V3.0.1 2017 - 12 - 11 AppearanceDocument40 pagesFive-Axis Offline Motion Controller Instruction Manual: V3.0.1 2017 - 12 - 11 AppearanceuongquocvuNo ratings yet
- Motor MathDocument6 pagesMotor MathsreelakshmisnrNo ratings yet
- MCFSW TutorialDocument130 pagesMCFSW TutorialAlfredo Chávez CárdenasNo ratings yet
- 利利普HDS200系列说明书Document38 pages利利普HDS200系列说明书uongquocvuNo ratings yet
- Finger Auto (A) / Ö÷3ÌÐò (OB1) Subroutine DocumentationDocument33 pagesFinger Auto (A) / Ö÷3ÌÐò (OB1) Subroutine DocumentationuongquocvuNo ratings yet
- M100702E MAI Memory Upgrade For Fanuc 02 PDFDocument22 pagesM100702E MAI Memory Upgrade For Fanuc 02 PDFSelvedin GudicNo ratings yet
- A4 HD330Document288 pagesA4 HD330uongquocvuNo ratings yet
- Shop Tên link SLDocument3 pagesShop Tên link SLuongquocvuNo ratings yet
- UPCX 530 controller firmwareDocument8 pagesUPCX 530 controller firmwareuongquocvuNo ratings yet
- B64393en PDFDocument1,076 pagesB64393en PDFuongquocvu100% (3)
- Bang Tra Thong So Motor Khong Dong Bo 3 Pha - VIHEMDocument14 pagesBang Tra Thong So Motor Khong Dong Bo 3 Pha - VIHEMNguyen Anh TuNo ratings yet
- (KHOAN10D-VKN) Ladder Diagram 1Document41 pages(KHOAN10D-VKN) Ladder Diagram 1uongquocvuNo ratings yet
- HP 1100ADocument198 pagesHP 1100AIoan AfodorceiNo ratings yet
- EDMI Mk6 Genius Revision D1Document284 pagesEDMI Mk6 Genius Revision D1uongquocvuNo ratings yet
- Trouble 1Document20 pagesTrouble 1ab_s5036No ratings yet
- High Power Laser Diode Specifications and PrecautionsDocument3 pagesHigh Power Laser Diode Specifications and PrecautionsuongquocvuNo ratings yet
- GE Fanuc Automation Europe Computer Numerical Controls PMC - C Language Programming ManualDocument580 pagesGE Fanuc Automation Europe Computer Numerical Controls PMC - C Language Programming ManualGuillermo RamirezNo ratings yet
- TL-MR3420 V2 User GuideDocument108 pagesTL-MR3420 V2 User GuideFabricio Camacho CruzNo ratings yet
- Electronics Repair ManualDocument957 pagesElectronics Repair Manuallfloryn96% (27)
- Ma Zak Manuals 1065Document25 pagesMa Zak Manuals 1065Uông TháiNo ratings yet
- CNC, CNC Router Table, CNC Plan, CNC PlanıDocument54 pagesCNC, CNC Router Table, CNC Plan, CNC Planıduranigne100% (9)
- LadderDocument235 pagesLadderuongquocvuNo ratings yet
- Semiconductor 4013 PDFDocument7 pagesSemiconductor 4013 PDFAlejo CuervoNo ratings yet
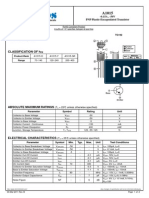
- Features: Elektronische Bauelemente - 0.15A, - 50V PNP Plastic-Encapsulated TransistorDocument2 pagesFeatures: Elektronische Bauelemente - 0.15A, - 50V PNP Plastic-Encapsulated TransistoruongquocvuNo ratings yet
- For Types of SalesDocument2 pagesFor Types of SalesHaris HasanNo ratings yet
- Accident Prevention by Eye Blinking Sensor and Alcohol DetectorDocument4 pagesAccident Prevention by Eye Blinking Sensor and Alcohol DetectorInnovative Research PublicationsNo ratings yet
- 486-PVT Motherboard Configuration GuideDocument15 pages486-PVT Motherboard Configuration GuideSamuel MarquezNo ratings yet
- 1602-18-737-080 - ES&IOT Lab RecordDocument114 pages1602-18-737-080 - ES&IOT Lab Recordcity cyberNo ratings yet
- P234CS24Document105 pagesP234CS24Григорий КоротовNo ratings yet
- Introduction To Linux ForensicsDocument22 pagesIntroduction To Linux ForensicsFelix ScribdNo ratings yet
- TR - Computer Hardware Servicing NC IIDocument70 pagesTR - Computer Hardware Servicing NC IIJenn MacasNo ratings yet
- CSO Gaddis Java Chapter01Document60 pagesCSO Gaddis Java Chapter01ẂalaMohammadNo ratings yet
- Manual B R PDFDocument323 pagesManual B R PDFJafarShojaNo ratings yet
- TS 883xu RP E2124 8GDocument2 pagesTS 883xu RP E2124 8Gabdel taibNo ratings yet
- RealDash Digital Signal MonitoringDocument2 pagesRealDash Digital Signal MonitoringMartin PerdomoNo ratings yet
- Installation Guide For 665 Scanner With Digipath 4.1Document14 pagesInstallation Guide For 665 Scanner With Digipath 4.1Arfan ButtNo ratings yet
- Pabillo vs. COMELECDocument3 pagesPabillo vs. COMELECaloevera1994No ratings yet
- Manual BoardDocument7 pagesManual BoardAndres Franco100% (1)
- RT Linux Vxworks Comparison WhitepaperDocument8 pagesRT Linux Vxworks Comparison WhitepapersayoneeNo ratings yet
- 1 Hardware Components WorksheetDocument9 pages1 Hardware Components Worksheetapi-267772822No ratings yet
- Vestel 17ips62-R2 Psu SCHDocument38 pagesVestel 17ips62-R2 Psu SCHnenop1967No ratings yet
- Delta - Siemens Comunication VFD-EL Via CME-PD01 (Profibus)Document28 pagesDelta - Siemens Comunication VFD-EL Via CME-PD01 (Profibus)VICTORSJNo ratings yet
- Palabra de Configuración 18f4550Document12 pagesPalabra de Configuración 18f4550Tito ArispeNo ratings yet
- SANTHIA 200 - LIS CONNECTION MANUAL Rev 2Document29 pagesSANTHIA 200 - LIS CONNECTION MANUAL Rev 2Sud007jbNo ratings yet
- Technical Papers Thin Client NetworkingDocument10 pagesTechnical Papers Thin Client NetworkinggynxNo ratings yet
- A78lm-M3s 130115Document47 pagesA78lm-M3s 130115ruslancikdurbalaNo ratings yet
- LeafletDocument2 pagesLeafletrloopelectricalsolutionsNo ratings yet
- DX Diag 5Document29 pagesDX Diag 5Riki SibekianzNo ratings yet
- HP Troubleshooting Assessment - 88.89Document4 pagesHP Troubleshooting Assessment - 88.89Viswa100% (1)
- BECS-C18 Computerized Embroidery Machine Owner's ManualDocument206 pagesBECS-C18 Computerized Embroidery Machine Owner's ManualSayantan RahaNo ratings yet
- Intel GFX CoinDocument2 pagesIntel GFX CoinshnmtxtNo ratings yet
- Enhanced Discovering Computers 2017 Essentials 1st Edition Vermaat Solutions Manual Full Chapter PDFDocument33 pagesEnhanced Discovering Computers 2017 Essentials 1st Edition Vermaat Solutions Manual Full Chapter PDFanselmthangxu5eo0100% (12)
- Kts 250 BrochureDocument3 pagesKts 250 BrochureMagnus MototechNo ratings yet