Professional Documents
Culture Documents
Modern Web Application Firewalls Fingerprinting and Bypassing XSS Filters
Uploaded by
clu5t3rCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Modern Web Application Firewalls Fingerprinting and Bypassing XSS Filters
Uploaded by
clu5t3rCopyright:
Available Formats
Porting OSE Systems to Linux
June 10, 2010
Fredrik Eriksson
fen05001@student.mdh.se
School of Innovation, Design and Engineering
Abstract
OSE is a real-time operating system from ENEA. One of the key features in OSE is the
signaling interprocess communication (IPC) system. ENEA has also released a similar
IPC system called LINX, that is platform independent.
For the purpose of running OSE programs under Linux, I have evaluated two software libraries that are designed to simulate the OSE programming environment. The
libraries in question are called SoftApi and OSEPL, where SoftApi was developed by
RealTime Logic and modified by me to utilize LINX for interprocess communication,
and OSEPL was designed by me to overcome some of the limitations in SoftApi. Neither of those libraries proved to be suited for production systems, but it is deemed
possible to implement a similar library that is.
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
Contents
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
1
1
2
2
3
3
Related Work
2.1 Linux in Real-Time Systems
2.2 OSE and Linux . . . . . . .
2.3 Performance Measurement
2.4 Software Projects . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4
4
4
5
5
Problem Definition and Analysis
3.1 Limitation and Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
6
The Operating Systems
4.1 Operating System Embedded (OSE) . . . . . . . . . . . . . . . . . . . . . .
4.1.1 The Signaling API . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Linux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
7
7
8
APIs and Porting Layers
5.1 LINX . . . . . . . . . . . . . . . .
5.2 Special Considerations . . . . . .
5.2.1 hunt() . . . . . . . . . . . .
5.2.2 Internode communication
5.2.3 Reserved signal numbers
5.2.4 Redirection . . . . . . . .
5.2.5 Context . . . . . . . . . . .
5.3 SoftApi . . . . . . . . . . . . . . .
5.4 Combining SoftApi and LINX . .
5.5 OSEPL . . . . . . . . . . . . . . .
5.5.1 Internal communication .
5.5.2 Errors . . . . . . . . . . . .
5.5.3 Process Types . . . . . . .
5.5.4 Other Limitations . . . . .
Introduction
1.1 Overview . . . . . .
1.2 Emulation . . . . .
1.3 Embedded Systems
1.4 Real-Time Systems
1.5 Operating Systems
1.6 Purpose . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Installing Linux
Performance
7.1 What is performance? . . . . . . . . .
7.2 Performance Metrics . . . . . . . . . .
7.3 Test Platform . . . . . . . . . . . . . . .
7.4 Timing Accuracy . . . . . . . . . . . .
7.5 Tests . . . . . . . . . . . . . . . . . . . .
7.5.1 Tests for Standard System Calls
7.5.2 Tests for OSE System Calls . .
7.5.3 Tests for OSE Signaling calls . .
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
9
9
10
10
11
11
11
11
12
12
13
13
14
15
15
16
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
17
17
17
18
19
19
19
20
20
School of Innovation, Design and Engineering
Results
8.1 SoftApi vs. OSEPL . . . . .
8.1.1 OSE System Calls . .
8.1.2 OSE Signaling Calls
8.2 Conclusions . . . . . . . . .
8.3 Future Work . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Appendices
22
22
22
23
23
24
I
A Tests
A.1 tests.h . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2 timing.c . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3 tests.c . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I
I
II
III
B Test Values
IX
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
Introduction
This section describe a few basic concepts and the purpose of my work.
1.1
Overview
Sometimes when using a computer, you find that there are better ways to solve something, and better tools to use. The many programs and usages of computers is one of
the things that makes some of us find them so interesting. Ironically it is also one of the
things that makes them confusing for others. For desktop computers there are in fact
three different major software platforms. There is the widely used Windows-platform;
there is the growing competitor Mac-platform, and there is the free alternative Linux.
Usually people just use the operating system that comes with the computer. Some people
know that they prefer another operating system and installs that the first thing they do
on the new computer. It happens, however, that after using one operating system for a
while you want to change to another for some reason; for example if there is a program
you need or want that can only be run on a specific platform.
Another reason for changing operating system is cost. Both Windows and Mac OS costs
money to upgrade to a new major system version; Linux however is free of cost. Therefor, some people may choose to use Linux instead of upgrading their proprietary operating system.
The problem with changing operating system is that, just like one of the reasons for
changing can be to get a specific program running, other programs that you frequently
use may not be compatible with the new platform. Sometimes you can find an equivalent program to replace it, and sometimes you might realize that that program is not
necessary after all. Sometimes there is an actual port of the program that can run on the
new platform, and if the particular platform switch is from Windows to a Unix-platform,
the simulation layer Wine may be an alternative.
1.2
Emulation
The terms simulation, emulation and vitualization are commonly used as synonyms,
and although they are all quite similar one should still be aware of the differences. In
terms of software platforms, simulation can be considered to be the most general term
and virtualization the most specific. Simulation is when a system mimics the abilities of
another system, if it is done on a very low level (for example interpreting and translating
assembly code from one architecture to another) then it can be considered emulation.
Virtualization is advanced emulation where not just processor instructions are handled,
but the entire hardware environment with processor, IO-devices, peripherals etc. are
emulated.
An example of a simulation system that is not emulation is Wine. Wine is a project
which aims to let you run Windows applications in Unix-based systems. The name is
commonly mistaken for Windows Emulator, but is in fact a recursive acronym: Wine
Is Not an Emulator [23]. Wine is a free implementation of Win32 API, and although
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
not the entire API has been implemented, it has been used for years to run Windows
programs under Linux and BSD systems.
Just like the name implies Wine does not emulate a system. When executing a Windowsprogram in Wine the machine code is interpreted by the hardware, just like it is when the
program runs in Windows, without any software layer that translates it. It does however
load the Wine libraries instead of the ones that exist in Windows.
Wine is commonly used in Unix-like desktop environments, as many commercial games
and office programs are written specifically for Windows. More specifically these programs are written for Windows running on a x86-architecture (or perhaps the 64-bit implementation x86 64). As Wine is not an emulator, it can only run those programs on the
same architecture. In the desktop world this is not much of a problem since almost all
desktop systems use processors from the x86-family.
Desktop systems aside, there are also many other kinds of computer systems.
1.3
Embedded Systems
Michael Barr and Anthony Massa defines embedded systems as a combination of computer hardware and softwareand perhaps additional parts, either mechanical or electronicdesigned to perform a dedicated function in their book Programming Embedded
Systems: with C and GNU Development Tools [3].
Most of the electrical devices people use daily is in fact embedded systems. A washingmachine, microwave and multimedia equipment does in fact contain one or more such
systems. Sometimes it can be hard to differentiate between an embedded system and a
general purpose computer system. Just five years ago mobile phones where considered
to be embedded devices, but with the growth of the smartphone market the phones sold
today have almost as much functionality as any general purpose personal computer.
1.4
Real-Time Systems
Sometimes, especially with embedded systems, it is not enough that the system does the
right things; it must also do the right thing at the right time.
A commonly used example of a real-time system is the control system for an airbag. The
operation of an airbag is simple. If the car collides the airbag is inflated and will soften
the impact for the driver. However; if the airbag is inflated too late the driver will already
have hit his head in the instrument panel.
Since the airbag begins to deflate shortly after deployment it is equally important that
the airbag is not deployed too early, as it quickly becomes ineffective.
Most real-time systems are not safety-critical like the airbag, anti-lock braking systems
or emergency shut down systems of a nuclear power plant [19], but nevertheless it is still
important that, for example, the sound is in sync with the video on the TV, or that your
phone starts ringing the moment someone calls and not ten minutes later. Generally
what is important for real-time devices is that they must have (more or less, depending
on the system) predictable response times.
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
1.5
Operating Systems
Simple embedded systems can be implemented without operating systems. In systems
that require multitasking, networking or have similar relatively advanced features, it is
more often than not easier to use an operating system. As can be seen on the Wikipedia
page of operating systems; there are quite a few such systems made for embedded
devices and many of those are made for usage in special purpose devices like mobile
phones, network routers or similar [22].
Generally an operating system consist of a kernel, which is the core of the system, as well
as userspace libraries and tools [20]. As mentioned earlier some operating systems are
developed for usage in systems with specific purposes, and so they also have different
functionality. An operating system developed for usage in network routers must for example have good network capabilities, while a system for MP3-players may not require
networking at all.
The operating systems that are relevant to the work in this paper are Operating System
Embedded (which I will refer to as OSE) and Linux. I will describe these operating systems
closer in section 4.1 and 4.2 respectively. The main difference between them is that while
OSE is designed and developed to be a reliable and predictable soft real-time operating
system, Linux has gradually evolved real-time support over the years [5]. The Linux
kernel can still be improved for even more predictable response times, but it has reached
a state where it is useful for real-time systems [2].
1.6
Purpose
Ericsson is one of the leading developer and provider of telecom equipment. Today
much software is built upon the OSE operating system from ENEA. While OSE is a very
capable operating system, Linux has a few advantages over it.
Due to the open nature of Linux it is a very popular platform for software development
and customisations, which has given birth to countless of tools and utilities to ease both
development and management. Just like the Linux kernel itself most of the tools are
available free of charge. The large user base also means that there are many developers
on the employment market who knows the system.
When porting a large system from OSE to Linux you do not want to rewrite all the programs that you have already developed for the platform; therefore it is desirable that the
existing programs can be run natively directly under Linux without any manual modification of the source code.
The primary goal of my work has been to implement an API-layer so that programs
written for OSE can run under Linux. This layer will work similarly to Wine described
in section 1.2 in that it should allow the execution of programs written for one platform
(here OSE) to be done on another platform (primary Linux).
My secondary goal has been to evaluate the performance of OSE programs that run under Linux. Getting the programs to work is of course necessary for migrating a system
developed for OSE to Linux, but if the performance penalty is too high it is not practically useful. Therefore I have compared both common system calls (such as malloc()
and free()) and system calls that is OSE-specific (such as send() and receive()).
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
Related Work
Since Linux in real time systems and performance measurement in software are quite old
phenomenons there are tons of papers that in one way or another can be seen as related
to my work. Here I have collected only the few that are most relevant to this paper.
2.1
Linux in Real-Time Systems
How to take advantage of Linux in a Real-Time environment has been researched since
at least 1996 when Barbanov and Yodaiken wrote a paper about their work in creating a
Linux for real time systems [1]. Their work eventually resulted in RTLinux, which was
the first implementation of a Linux for hard real time systems [25]. Today there are at
least two more open source projects for this purpose: Xenomai and RTAI [10, 14].
These projects are also used and maintained by various corporations that use and sell
Linux for real time systems. MontaVista is one such company and their guide for how
to port legacy real time applications served as a good starting point for the work in this
paper (see section 3) [21].
It should be noted though that none of those projects are true Linux in the sense that
it only runs a Linux kernel. Instead they use a real-time core that cooperate with the
Linux kernel to achieve real-time characteristics. Real-time support for the standard
Linux kernel became better with the release of version 2.6, and the ability for user-space
programs to preempt non-critical sections of the kernel [5].
2.2
OSE and Linux
Viveka Sjoblom
has compared various performance aspects of Linux and OSE [18]. Sjoblom reaches the conclusion that comparisons between operating systems (both in her
and my case these operating systems are Linux and OSE) are possible, and best comparison is done by comparing execution time of system calls. System calls are good since
they usually have similar capabilities in different systems, and any program that runs on
the system will use the system calls extensively.
There are a few differences between the work in this thesis and what Sjoblom
did. First
off, Sjoblom
used a Linux distribution provided by the hardware manufacturer which
probably is optimized and well tested for that particular hardware. In this thesis a
generic distribution that can be installed and used on many different hardwares is used.
The main difference between mine and Sjobloms
work is that I have not just tested an
arbitrary Linux system, but Linux with a porting layer to mimic OSE functionality. The
tests of system calls that are natively available on both platforms should not differ from
Sjobloms
work.
Boman and Rutgersson also ported Linux and a bootloader to the MPC8360 PowerPC
platform [17]. Their goal was to test if Linux could replace OSE in soft real-time systems. The report contains an in depth comparison in various aspects of OSE and Linux.
They reached the conclusion that although there are some trade-offs, Linux is a viable
alternative to OSE when it comes to performance and stability.
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
2.3
Performance Measurement
Generally papers on software performance measurement deals with more or less complex systems [4, 11, 13]. While my work is focused on more modest performance measurements, such papers has still served as inspiration and introduction to the subject.
Most apparent inspiration comes from Collberg and Hugne, who used hardware performance counters to measure performance in real time systems [4]. In my work I have
used the hardware clock counter to measure execution time to make the procedure as
non-intrusive as possible.
2.4
Software Projects
There are two software projects that is of great importance to my work. The first is
SoftApi developed by RealTime Logic. SoftApi is an implementation of the OSE API. It
was originally designed to allow OSE programs to run in a Windows NT environment,
but was later ported to run under Linux as well. The second software project is LINX,
which is an open source project from ENEA which is very similar to the signaling system
used for interprocess communication in OSE. These two pieces of software are discussed
in more detail in section 5.3 and 5.1 respectively.
With these projects as background my hypothesis is that OSE-programs running under
Linux should be both possible and feasible.
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
Problem Definition and Analysis
As described earlier there are various reasons why you would like to port an OSE system
to Linux. The problem is to find a way to do this both for small systems with just a few
custom programs, and large systems with hundreds of such programs. Of course the
system should still be useful afterwards, so there must not be any major performance
loss. It is not unusual to migrate embedded real-time systems to Linux. William Weinberg from MontaVista Software has written a white paper about the general process of
such migrations [21].
Weinberg mentions three ways for porting real-time systems to Linux:
1. Full native Linux application port
2. Run-time partitioning with virtualization
3. RTOS API emulation over Linux
A full native Linux port might very well be considered for systems that consist of only a
few small programs that mainly use standard POSIX system calls. This does not describe
Ericssons system as it consists of hundreds of different programs and extensively uses
OSE specific system calls.
The second option basically describes that the real-time operating system can run in
parallel to a native Linux environment. Since one of the goals from Ericssons point of
view is to save cost by not using a proprietary operating system, this is not an option
either.
What Weinberg describes as RTOS API emulation is what was described in the introduction as a Wine-like layer. A simpler term, and the term that will be used in the rest of
the paper, is porting layer as described by Raghaven et.al[16]. This seemed to be the
best option to use for this particular system. By creating a API-layer for OSE system calls
all the hundreds of programs already developed for the platform should be able to run
without any modification.
3.1
Limitation and Future Work
Focus in this paper is functionality and performance of a single node. Complete analysis
of a complete multi-node system is left out for future research. This also means that compatibility of OSE and Linux nodes is not tested. Furthermore the performance analysis
in this paper is focused on execution time (or response time) of system calls (see section
7 for more information about different performance aspects).
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
The Operating Systems
This section describes relevant functionality and differences between OSE and Linux.
4.1
Operating System Embedded (OSE)
OSE is a real-time operating system developed by ENEA. OSE is flexible and used in
a wide variety of systems, raging from mobile phones to industrial control systems [8].
The operating system itself is quite small and only provides basic functionality. One of
the more central functions of OSE is the advanced signaling API.
4.1.1
The Signaling API
The main method for interprocess communication in (and between) OSE systems is by
OSE signals. The OSE signaling system is very simple to use, but is nevertheless quite
powerful. The signaling API consists of only a few system calls where some of the most
important ones are:
hunt()
alloc()
free buf()
send()
receive()
When a process is started in OSE it has to have a name assigned to it. This name is a
simple (human readable) text string that can then be used by other processes that wants
to communicate with the process. The name is sent to the hunt() call which is used to
obtain the ID of the process. The ID can then be used as an address to send signals to.
Signals can vary in size and are allocated dynamically with the alloc() system call. An
allocated signal can be sent to other processes with one of the send() system calls or be
freed with the free buf() call. When a signal has been sent the recipient can retrieve
the signal with receive() or one of the similar system calls.
Besides being used for communication between processes within a single system, signals
can also be used for communication between different systems. For this purpose OSE
uses a link-handler that keeps track on where to find the neighbouring systems. The
process of communicating between systems is just the same as communicating within
the same system, with the exception that the process name has to be preceded by a path
which describes which node the process is running on.
Below is an example of a function that takes a process name as input argument, hunts
for the process and sends a signal to it.
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
void s e n d s i g ( char name )
{
PROCESS s e r v p r o c ;
SIGSELECT s i g s e l h u n t [ ] = { 1 ,OSE HUNT } ;
/ u s i n g a l l o c ( ) t o a l l o c a t e memory f o r a hunt s i g n a l /
union SIGNAL s i g = a l l o c ( s i z e o f (OSE HUNT) , OSE HUNT ) ;
/ u s i n g hunt ( ) t o f i n d t h e p r o c e s s . /
hunt ( name , 0 , ( PROCESS ) NULL, s i g ) ;
/ hunt ( ) consumed t h e s i g n a l , s o we can f r e e l y u s e t h a t
v a r i a b l e f o r a new s i g n a l . s i g s e l h u n t i s s p e c i f i e d s o
t h a t we w i l l o n l y a c c e p t OSE HUNT s i g n a l s . /
sig = receive ( sigsel hunt ) ;
/ The p r o c e s s can b e f o u n d u s i n g s e n d e r ( ) /
s e r v p r o c = sender (& s i g ) ;
/ we don t n e e d t h e s i g n a l anymore /
f r e e b u f (& s i g ) ;
/ and now we can s e n d any s i g n a l t o t h e s e r v e r p r o c e s s .
I w i l l u s e PING SIG i n t h i s e x a m p l e , a l t h o u g h i t s n o t
an OSE s t a n d a r d s i g n a l /
s i g = a l l o c ( s i z e o f ( s t r u c t p i n g s i g ) , PING SIG ) ;
send(& s i g , s e r v p r o c ) ;
/ j u s t l i k e hunt ( ) , s e n d ( ) consumes t h e s i g n a l , s o no
memory n e e d s t o b e f r e e d h e r e /
}
4.2
Linux
Linux is an open source operating system originally developed by Linus Torvalds in 1991
as a free Unix implementation for computers with Intel 386 processors. Although Linux
is designed to be a general purpose operating system, it has come to be used in a wide
variety of systems, raging from small embedded devices to large computation clusters
[24].
For direct communication between processes Linux has its own signaling system, but
this system has very little in common with the OSE counterpart [18]. Linux signals has
(very) limited size, and cannot be used to communicate with processes on external systems. The most common use of Linux signals is to send interrupts to processes. Other
interprocess communication methods includes shared memory, network sockets and a
huge selection of different message queues. None of the communication methods included in a standard Linux kernel is really similar to the OSE signals, but the extension
LINX from ENEA can be used together with Linux and provides some of the OSE functionality (see 5.1).
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
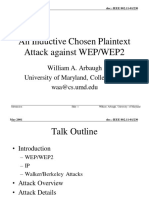
Figure 1: Layers of libraries used by OSE programs when run under Linux (left) and OSE
(right)
APIs and Porting Layers
Standard C functionality can be found in both OSE and Linux, so file control, string
manipulation and similar capabilities will work out of the box on Linux systems. For
other functionality there is need for a porting layer that mimic the OSE API. The API
layers for running OSE programs in Linux is described in Figure 1. Two porting layers
have been tested: SoftApi and OSEPL.
5.1
LINX
LINX is a interprocess communication API and service for Linux and OSE. It is developed by ENEA and boasts with being highly scalable, reliable and open source. In Linux
LINX consists of a few kernel modules as well as a programming library. LINX can be
used for communication within a single system and communication with other LINX
nodes. Communication between nodes can be done either using TCP/IP or raw Ethernet. The advantage of using LINX in the porting layers is that it is very easy to translate
OSE signaling calls to LINX calls.
Below is the send sig() function from 4.1.1 implemented using LINX calls. The LINX
pointer is obtained when initializing LINX using linx open() and is needed for almost
all LINX-calls. As can be seen, this looks very similar to the OSE implementation.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
void s e n d s i g ( LINX l i n x , char name )
{
LINX SPID s e r v p r o c ;
LINX SIGSELECT s i g s e l h u n t [ ] = { 1 , LINX OS HUNT SIG } ;
union LINX SIGNAL s i g ;
/ u s i n g l i n x h u n t ( ) t o f i n d t h e p r o c e s s . LINX u s e s a
LINX OS HUNT SIG by d e f a u l t s o t h e r e i s no n e e d t o
a l l o c a t e i t h e r e . /
l i n x h u n t ( l i n x , name , NULL ) ;
/ l i n x h u n t ( ) consumed t h e s i g n a l , s o we can f r e e l y u s e t h a t
v a r i a b l e f o r a new s i g n a l . s i g s e l h u n t i s s p e c i f i e d s o
t h a t we w i l l o n l y a c c e p t LINX OS HUNT SIG s i g n a l s . /
sig = linx receive ( linx , sigsel hunt ) ;
/ The p r o c e s s can b e f o u n d u s i n g l i n x s e n d e r ( ) /
s e r v p r o c = sender ( l i n x , &s i g ) ;
/ we don t n e e d t h e s i g n a l anymore /
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
21
22
23
24
25
26
27
28
29
30
31
10
l i n x f r e e b u f ( l i n x , &s i g ) ;
/ and now we can s e n d any s i g n a l t o t h e s e r v e r p r o c e s s .
I w i l l u s e PING SIG i n t h i s e x a m p l e , a l t h o u g h i t s n o t
an OSE s t a n d a r d s i g n a l /
s i g = l i n x a l l o c ( l i n x , s i z e o f ( s t r u c t p i n g s i g ) , PING SIG ) ;
l i n x s e n d ( l i n x , &s i g , s e r v p r o c ) ;
/ j u s t l i k e l i n x h u n t ( ) , l i n x s e n d ( ) consum es t h e s i g n a l , s o no
memory n e e d s t o b e f r e e d h e r e /
}
In November 2009 when I started my work the latest version of LINX was 2.2.2. This
version was incompatible with the lab-environment, and so I created three patches to
fix this. Two of the patches fixed the incompatibly with newer versions of the Linux
kernel (namely in the /proc and /sys file systems in 2.6.31), and the third patch was used
to make the build-process compatible with the Gentoo portage system. In December
ENEA released LINX version 2.3.0, which fixed the kernel issues, and therefore only the
portage-patch was needed.
5.2
Special Considerations
LINX is used as a communication back-end for both SoftApi and OSEPL. This section
describes a few issues with LINX that may be of importance for further evaluation of
the porting layers. Note that these issues noted on version 2.3.0 of LINX, which is used
unmodified in both SoftApi and OSEPL.
5.2.1
hunt()
According to the OSE-kernel data sheet [7] there are special processes called blocks.
All prioritized processes (which is the process type used for ordinary user-space processes) belongs to a single block. The blocks are handled just like any other process in
the system, with the exception that some operations that are done on the block affects all
processes inside that block.
The blocks are also important for the hunt() call. hunt() is used to search for processes
with a certain name and according to the OSE API [6], the search is done in a certain
order:
1. Processes in the callers block.
2. Other blocks.
3. Processes in other blocks.
4. Processes on other nodes.
In LINX the hunt() call does not search in any particular order. In fact the LINX API [9]
states that it is not defined which instance will be found by the hunt in case more then
one processes has the same name. This can potentially be a problem for existing OSE
programs that is run through one of the porting layers, if they for example name a block
the same as one of the processes in the block.
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
5.2.2
11
Internode communication
LINX can be used just like OSE signals to send messages to processes running on other
systems (although SoftApi may not be reliable in that aspect, see 5.4). I have not examined how, or even if, LINX messages passed on a network differs from external OSE
signals, therefore there is no guarantee that nodes running LINX and OSE can communicate with each other.
LINX only implements the communication API, with send(), receive() and similar calls,
but there are also other calls in the OSE API that use the same addressing system (in OSE
it is simply a PROCESS ID, in LINX it is called SPID). Just as send(&sig, pid) sends the
signal sig to the process referred to with pid regardless if the process is running on the
local system or on another node, kill proc(pid) is supposed to kill the process even if it
runs on another system. This functionality can not be directly implemented with the aid
of LINX. Neither SoftApi nor OSEPL has this functionality implemented.
5.2.3
Reserved signal numbers
The first 4 bytes in a LINX signal is a signal number that can be used to identify the
message type. In LINX signal number 0 is invalid and numbers between 250 and 255 are
reserved for internal use. None of the available documentation for OSE mentions anything about reserved signals, therefore it might be possible that some programs written
for OSE use these signal numbers. If so, then those programs has to be re-written to use
other signal identifiers.
It is possible to automatically translate invalid signal numbers in the porting layers.
However, since the porting layer does not know what signal numbers are used in the
rest of the running applications, there is no way to guarantee that the translation (which
must be done both on the sending and receiving side) does not interfere with any other
signal number.
5.2.4
Redirection
With the OSE set redirection() system call it is possible to redirect signals sent to a process
to another process instead. There is also a addressee() function that can analyze a signal to determine which process it was originally sent to. Neither of these functions are
implemented in LINX. Since these are functions closely related to the signaling system,
it is probably better to try to build in this functionality in LINX rather than letting the
porting layer keep track of redirections. Neither SoftApi or OSEPL has this functionality
implemented.
5.2.5
Context
As mentioned all LINX calls requires the use of a local LINX pointer obtained by calling
linx open(). This pointer cannot be used out of context. If a process opens a LINX
pointer and forks, the pointer must be closed by either the parent or the child. Another
noteworthy observation is that the LINX pointer cannot be opened by a process and
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
12
then used by another thread within the process. This means that the LINX pointer must
always be opened by the thread that is going to use it.
5.3
SoftApi
SoftApi is a Linux/Windows NT-implementation of the OSE API written by RealTime
Logic. The main purpose of the API seems to be testing of OSE programs in a Windows
NT environment.
At first glance SoftApi seems to be a full implementation of the OSE API, but after checking the source code you can see that it is probably not very useful for production environments. The main drawback is the implementation of the signaling system, since a
program running in the OSE API can only communicate within one single Linux process. Within this Linux process you can have several different OSE processes, but since
those processes refer to each other using internal PIDs no external process can communicate with them.
The API also seem to suffer from quality issues. The code is very sparsely documented
and hard to read. It even utilizes goto statements at some places in the code, which is
commonly seen as bad practice. The standard makefile for the API does not use any
warning flags when compiling. When adding warning flags to the compilation command, the build output showed hundreds of lines with warnings and the compilation
was aborted with errors.
5.4
Combining SoftApi and LINX
To make SoftApi able to communicate with other SoftApi processes on a system, it was
necessary to replace the communication system implemented in SoftApi. The implementation from RealTime Logic required all OSE processes to run in a single process to have
access to the same memory area.
At first glance it may seem like a simple task to integrate LINX into SoftApi. The API
is almost the same so making for example send() call linx send() internally is quite
easy to implement. But of course some special care is needed to make sure that the
system still behaves as it is supposed to.
SoftApi is limited in that it only allows a single Linux process. All OSE processes started
in SoftApi are started as threads within that single process. While it may be faster (especially when creating new OSE processes) and easier to emulate a precise environment
for the application, it also has disadvantages. The main disadvantage is apparent when
you start many different OSE programs. Since they all share the same Linux process, if a
single OSE program crashes, all other applications will also be terminated.
SoftApi has some shared memory in which information about the processes is stored. In
RealTime Logics implementation of the signaling API this shared memory is also used
to store signals. That design makes it impossible to send a signal to a process that has no
knowledge about the shared memory, and therefore communication between different
instances of SoftApi is not possible. This is not limited to the signals, but also applies to
all calls that uses process IDs, as the IDs are used to identify where in the shared memory
the process has its data.
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
13
When integrating LINX in SoftApi there were two choices: Either create a new ID system
where the LINX SPID can be used as IDs, or add the LINX SPID as a separate ID and let
the signaling functions translate the SoftApi ID to a LINX SPID. The second option was
chosen since that would only need minor changes in the SoftApi code, and it would not
result in any major slowdown for any of the system calls, with the exception of sender()
which is the only function that needs to translate a LINX SPID to a process ID.
The only functionality that is known to have been broken in the integration of LINX is
redirection (see 5.2.4).
These are the known issues of the combination SoftApi and LINX:
Non-communication calls that take a process ID (like kill proc()) can only be used
on processes within a SoftApi instance (not between SoftApi processes regardless
if they run on the same or different systems).
For reasons unknown SoftApi only works if it is statically linked into the program,
no dynamic linking.
Programs compiled for an OSE environment will not work, probably due to type
and/or macro declarations. The source code needs to be compiled using SoftApi.
Every instance of a SoftApi program starts their own sysDeamon and tickDeamon.
Redirection does not work.
5.5
OSEPL
As SoftApi suffered from quality issues, could not collaborate with other instances and,
most of all, run all processes within a single Linux process, I wanted to create an API
without these limitations. The result was OSEPL; a quick implementation of the most
fundamental OSE functionality. OSEPL is a proof of concept and even some basic functionality (such as semaphores) is not implemented yet. Nevertheless it is more reliable
when it comes to multiprocessing than SoftApi is.
Just like SoftApi OSE processes are started as POSIX threads within the API. However, in
OSEPL blocks are started as separate Linux processes. The idea is that processes should
be started by the block they where created in. Due to time constraints the managing of
block process is not completely implemented at the moment, but should still be trivial to
implement.
5.5.1
Internal communication
Some OSE calls can be used to request information from other processes. As OSEPL
does not have any memory that is shared by all OSE processes this information has to be
obtained by some other interprocess communication method.
Since OSEPL uses LINX as backend for the OSE signaling system, all limitations mentioned in section 5.2 applies. Instead of reserving more LINX signals for internal communication, OSEPL processes uses POSIX message queues. The choice of POSIX message
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
14
School of Innovation, Design and Engineering
Call
start()
stop()
kill proc()
Signal
SIGUSR1
SIGUSR2
SIGTERM
Description
Start a suspended process
Suspend a running process
Terminate a process
Table 1: Linux signal used by OSEPL
queues was made for mainly two reasons. First off they are simple to use and supports notification when a new message arrive. The second reason is that POSIX message
queues are designed to be deterministic and efficient, which makes them useful in a realtime environment [12].
OSEPL differs from SoftApi in that the OSE process IDs are the same as the LINX SPID
for the process, that way there is no need to translate between different IDs. Whenever
a process starts it first opens a LINX endpoint and obtain the local LINX SPID. Then the
process opens a POSIX message queue named /OSEPL ID where ID is the process ID.
Whenever a message is sent to this message queue a new thread is started (with the OSE
process thread as parent) which takes care of the message.
The following calls will use POSIX message queues when called with an ID that is not
the ID of the calling process:
get bid()
get pcb()
set pri for()
start()
stop()
kill proc()
get bid() and get pcb() will return the requested value through a separate message queue
named /OSEPL REQ ID, where ID is the ID of the called process. By using one-way
communication through the message queues there is no risk that a request from the
above system calls is accidentally read by the wrong process.
For start(), stop() and kill proc() that should affect the execution of the target process,
Linux signals are used in addition to message queues. When a process calls for example
stop() to stop another process, first a message is sent through the message queue that tells
the process that stop has been called. The message is received by a separate thread in the
process which in turn sends a SIGUSR2-signal to the thread running the OSE process.
The signal is caught by a signal handler which halts the process execution by calling
pause(). The Linux signals used in OSEPL are listed in table 1.
5.5.2
Errors
As mentioned earlier OSEPL is a proof of concept implementation. One of the areas
where there is still much work that needs to be done is the error handling. None of the
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
15
functions described in ose.h that has to do with error handling is implemented. Likewise internally in OSEPL errors are not always taken care of. In some areas (especially
when creating new processes), when something goes wrong the API prints an error and
then exits, while other areas may just report that something went wrong but try to continue anyway. In other places error codes are not checked at all.
5.5.3
Process Types
OSE describes several different process types, where the most common are prioritized
processes, interrupt processes and block processes. Block processes are implemented
to a certain extent (see section 5.5), but otherwise only prioritized processes can run in
OSEPL at the moment.
5.5.4
Other Limitations
The current implementation of OSEPL is in no way optimized. To simplify debugging
some of the critical sections are far longer than they need to be, and some of the procedures could be made asynchronous to, for example, take advantage of multi-core
systems. Some of the system calls (especially create process() and kill proc()
might actually do far more than is needed at that point of execution. In whole OSEPL
is not suited for production environment at this point, but serves more as proof that it
is possible to create a porting layer that takes more advantage of Linux-specific features
than SoftApi does.
Just like for SoftApi, it is not possible to run programs that are compiled for OSE directly
due to differences in macro and/or type declarations in the header files. Instead the
programs has to be compiled against the OSEPL porting layer.
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
16
Installing Linux
The performance measuring will be on two different software platforms, OSE and Linux,
but both will be running on the same hardware. The hardware platform is a GPB64 card
with a PowerPC processor. The hardware has almost full support in the Linux kernel so
no modifications was needed for it. For these tests the root filesystem was mounted over
NFS.
There are many Linux distributions available for the PowerPC architecture, and I choose
to install Gentoo. There are mainly three reasons for this:
1. The base installation is fairly small with only basic tools available.
2. It comes with a ready-to-use development environment.
3. I have used Gentoo for a long time and therefore I am very familiar with the system.
Installation of Gentoo is simple, all that is needed is to download a stage3 snapshot for
powerpc (which basically is an archive containing a full root filesystem) and extract it to
the NFS root on the server. The only thing that actually needs configuration is one line
in /etc/fstab to get the root filesystem mounted automatically, setting root password
and configuring the ssh server to start at boot (which in Gentoo is done by running $
eselect rc add sshd default).
Since the development card does not have a working real time clock the time has to be
set manually at every boot. This could easily be fixed by letting the card sync the clock
over NTP.
Configuration and compilation of the Linux kernel, as well as initialization procedure to
run the Linux kernel on the hardware, was done according to instructions provided by
Ericsson.
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
17
Performance
This section describes the methodology and tests used for the performance measurements.
7.1
What is performance?
It is common that software for personal computers (especially games which I will use as
examples) comes with a description of minimal system requirements. Often it is possible
to run the software on hardware that does not quite fulfills these requirements, but most
likely you will run into some sort of problem. Most common is that the application runs
too slow, but if you don not have enough memory in the computer or the software is
optimized for a different processor, it will probably crash. Either way, running software
on a platform that does not perform as well as the software expects is generally a bad
idea.
The software developer specifies the system requirements so the end-user knows if it is
possible to run the software on his/her computer. But how does the developer know
what hardware to specify as requirement?
For game development the developers have to make some trade-offs. Only the most devoted gamers will buy a game that is unplayable on anything but the latest hardware.
Nevertheless modern computer games are expected to have advanced 3D-features and
realistic physics which generally requires powerful computers. The developer will have
to make a decision based on what hardware will be commonly used when the software is
released and what kind of features the game should have, to decide the system requirements.
Of course games are not the only area in software where performance is a concern. A
web page that takes half a minute to render because of large file sizes and/or advanced
scripts is not useful. In this case it might not be the end-users hardware that is the bottle
neck, but it may also be the network capacity or the load on the web server.
A third example is VoIP-applications (Voice over IP). Even if the application only uses a
small amount of the hardware resources, and even if it the network bandwidth usage is
sparse, the user may still experience poor performance if the response time is too long.
When speaking with someone over telephone or VoIP-systems we expect that our word
reaches our partner at the other end of the line without any delay. Of course instant
voice-transportation is not possible, but when the delays can be counted in seconds it
gets difficult to have a conversation.
7.2
Performance Metrics
Even if it is fairly easy as an end-user to say that a program performs poorly (after all,
the only times we think about performance is when we notice that it is poor), it is very
difficult to find a single metric for performance. That said, depending on the application
there might be a single property that is of special interest for the application performance.
This is especially true if we move away from the area of personal computers and take a
look at embedded systems, network equipments and web-based services.
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
18
Although there are no universal performance metric, there are a few areas of special
interest. Molyneaux defines the following four metrics for performance [15]:
Availability defines the amount of time the application is usable for the end-user. This is
seldom a problem on personal computers, where the end-user actively has to start
the program, and influences from other users/systems are limited. It is a more
relevant metric for embedded devices and web-based applications.
Response time is the time it takes for the application to respond on input. Both the
web-page and VoIP examples above deals with response times. Response times
are very important in network equipment such as routers and switches, as they
should not be bottle necks for the many network applications that requires short
response times.
Throughput is a rate metric for the application. It can be how many network packages
a router can handle per second, or the frame rate of a game.
Utilization describes how the application uses resources. For shared resources a low
utilization is generally good (for example will a low memory usage leave more
memory for other programs in the system). For non-shared resources a low utilization can mean that you could save money by using cheaper hardware.
For this paper I have only focused on response times, which in this case is execution time
of system calls; leaving the other performance aspects for future work.
7.3
Test Platform
These tests have been run on a GPB64-card from Freescale, featuring a mpc8641 PowerPC processor. For the tests, all libraries were compiled without debugging symbols
and with the gcc optimize flag set to 2.
The Linux userland was a Gentoo stage 3 snapshot from 2009-11-15. The test program
was compiled natively on the platform with the gcc and glibc versions below. Other
than uninstalling and reinstalling the different porting layers, and recompilation of the
test program, nothing was changed between the test run of SoftApi and OSEPL.
kernel 2.6.31.4
LINX 2.3.0
glibc 2.9
gcc 4.3.4
The OSE installation was at version 4.6.1 and was provided by Ericsson. As the OSE
installation did not contain a compiler, programs written for OSE had to be compiled on
another platform. This cross compiled enviornment was provided by Ericsson, and used
gcc version 3.4.4.
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
7.4
19
Timing Accuracy
One of the difficult things when measuring execution time is to do accurate measurements. Always when doing performance testing using software, the measurement software itself will affect the result [4]. There are many other factors that can affect the performance measurement including hardware interrupts, context switches, caching, memory
swapping and more. These factors are relevant even for small installations without many
processes and interference from the outside world; like the current test setup. By running
many iterations of each test the mean value should give a good indication of the execution time even without having to address every single one of the possible interference
factors.
Sjoblom
mentions that it was difficult to find a method for measuring time equally on
OSE and Linux, but she does not mention what methods she actually used [18]. Instead
of focusing on seconds, and letting the operating system do the time measurement, I
choose to count the time in clock cycles. I have used inline assembly to read the CPU
cycle count directly from the hardware. That way I am sure to measure the time equally
in OSE and Linux. As a bonus using assembly makes this operation very fast, thus does
not have any major effect on the test result. A test to benchmark the timing overhead
showed that about 3-4 clock cycles was needed for the assembly instructions.
7.5
Tests
As mentioned earlier I have, just as Sjoblom
did, focused on testing execution time for
system calls. The system calls I have chosen to explore can be divided into three different
groups. The first group are system calls that exists in both OSE and Linux, and the result
of these tests are expected to match the results Sjoblom
reached. The second group are
system calls that are OSE specific, but not related to the signaling system, and the third
group are the signal API calls. The tested system calls in their respective groups are
described in table 2.
The test code is available in appendix A. The most crucial code for the tests is the BENCH()
macro defined in tests.h. As can be seen from the code the macro lets you define, not
only what function(s) should be tested, but also what functions to run before and after
the test. For the results in this paper, the tests where run 1000 times, and the timing from
every single iteration was saved to a file for later analysis.
7.5.1
Tests for Standard System Calls
These system calls where chosen because of Sjobloms
work. By benchmarking the same
system calls, the result can be used to confirm her findings. The tests can also be used
together with Sjobloms
tests as references to analyze the impact a porting layer has on
the other functions.
The test for malloc() is similar, but not identical to the one Sjoblom
did. Just like her I
have done two tests of malloc(), one that allocates a small amount of memory, and a
second that allocates more memory. Sjoblom
did not define exact values for these tests
but used pseudo-random numbers in each iteration. Since I want all iterations to do
exactly the same thing, I defined the small amount of memory to be 1024 bytes and the
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
20
School of Innovation, Design and Engineering
Group
Standard
OSE System
OSE Signals
Functions
free()
malloc()
memcpy()
memmove()
memset()
create process()
get bid()
kill proc()
receive()
send()
sender()
Table 2: Different groups of system calls
large amount to be 1 000 000 bytes. For all other memory functions I only tested for 1024
bytes.
memset() was done by filling a buffer with the number 123, memcpy() and memmove()
was done by moving/copying memory within a buffer that was twice the size of the test
data (1024 bytes). memcpy() and memmove() was tested twice, the first time the data
was copied from the beginning of the buffer to the end, and the second time from the
end of the buffer to the beginning. All in all, these tests should be identical to the ones
Sjoblom
preformed.
7.5.2
Tests for OSE System Calls
create process() is an important call in OSE as it is the only recommended way to
create a new processes. It is also one of the calls that are bound to have some overhead
in the porting layers compared to the Linux pthread create(), clone() or fork()
calls. Noteworthy is that in OSE a process is created in a stopped state, which means
that no time consuming context switch is needed for the create process() call. It is
possible to mimic this in Linux with the clone() call, but neither of the porting layers
do this, so context switches are to be expected on Linux.
kill proc() is almost as important as create process() as it deals with killing
processes. In the porting layers the call is important since all memory and listeners that
has been set up for a process must be removed/freed when this call is used.
The last call in this group is the get bid() call. This is mostly because of the implementation in OSEPL, where the call is forced to use POSIX message queues when figuring
out the block ID of a process, unless the call is used on the calling process itself. By testing this call you can see how using POSIX message queues affects the execution time of
an otherwise trivial system call.
7.5.3
Tests for OSE Signaling calls
Testing send() and receive() is a given when it comes to testing the OSE signaling
system. These calls (along with send w s(), receive w tmo() and the rest of the fam-
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
21
ily) are widely used in OSE program for interprocess communication, and it is important
that these calls perform well in the porting layers. Both of the porting layers use LINX
as backend for these calls, the only thing that differs between the APIs is how the local
process accesses its LINX pointer. These calls are tested both on their own and together
in the sequence send()receive(). The process to which the signal is sent responds
by sending the signal back to the sender as soon as it receives a signal.
The tests of send() and receive() were done with three different sizes of messages.
The smallest messages tested was 128 bytes and the larger messages where 1024 and
4096 bytes.
The benchmarking of the sender() call is done because of SoftApi. SoftApi uses internal process IDs that cannot automatically be translated to a LINX SPID address, which
means that SoftApi has to store both a process ID and a LINX SPID for every process.
Every time SoftApi makes a call to a function from the LINX API which uses LINX SPID
(for example send() it must translate the local PID. sender() differs from all the other
calls as the translation is reversed. Instead of translating from an internal PID to a
LINX SPID, the translation goes from a LINX SPID to a PID. The implementation differs depending on which way the translation should be done, and therefore it might be
interesting to see how the sender() function from SoftApi differs from OSEPL.
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
22
Results
The tests mentioned in section 7.5 were supposed to be run on three different software
platforms: OSE, Linux with SoftApi and Linux with OSEPL. Unfortunately there were
some unforeseen difficulties with the OSE software platform on the test hardware, and
therefore a complete test of OSE could not be carried out.
It would seem that the card these tests were run on has much faster memory than the
platform Sjoblom
tested, as in her tests memcpy(), memmove() and memset took far
longer time than malloc() and free() while in these tests the difference in execution
time was much smaller. Because of this, and since there are no results from OSE on this
platform it is difficult to draw any conclusions about Sjobloms
work.
This section will compare the results of the tests of the different porting layers. The actual
test data is available in appendix B for authorized individuals only.
8.1
SoftApi vs. OSEPL
As neither SoftApi nor OSEPL use any wrapper for the standard system calls, the difference between the test results of those functions is negligible. An analysis of the rest of
the calls, the OSE system calls and OSE signaling calls, follows in the sections below.
8.1.1
OSE System Calls
Somewhat expected, OSE system calls are far slower in OSEPL compared to SoftApi.
Both create process() and kill proc() took about 100 times longer in OSEPL.
For create process() the slowness can probably be explained by the heavy initialization procedures in OSEPL. OSEPL currently initializes the pcb-struct at process creation. This is probably unnecessary for OSE programs that does not extensively uses the
get pcb() call, as that is the only call that actually use the struct. Not all initialization
procedures can be cut out though, as opening message queues and setting up notification
for messages is very important for the API to function.
On multi core systems it might be possible to speed up the creation of processes in OSEPL
by making some of the initialization of the new process asynchronous. In the current
implementation create process() initializes as much as possible before creating the
new thread. After that it waits until the new thread has run all initializations before it
returns. Instead it should be possible to quickly create a new thread, letting the thread
initialize LINX, and then return and let the rest of the initialization be done in parallel
while the calling process continues its execution.
Even kill proc() could be done much faster in OSEPL by making the call asynchronous. The current implementation waits for the dying process to send a message
back to the caller right before it terminates, letting the caller know that the process has
exited. It should be noted that SoftApi does not seem to completely terminate a process
as soon as kill proc() is called, therefore shared resources (such as memory) may not
be freed just because kill proc() has returned.
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
23
OSEPL also falls short in terms of predictability in these calls. For create process()
most values for OSEPL was measured within a span of about 6 000 000 clock cycles,
while SoftApi kept the execution time within a span of 55 000 clock cycles (most of them
within 10 000). For kill proc() the difference was not quite as remarkable, but still
very apparent.
In get bid() OSEPL falls even further behind as the mean execution time in OSEPL
is over 500 times longer than SoftApi. As mentioned earlier the test of get bid() was
chosen because of the use of POSIX message queues in the OSEPL implementation, and
this test clearly shows that using message queues takes a very long time compared to
fetching data from shared memory. To be fair, while it is true that it takes 500 times
longer for OSEPL the actual execution time is still very short. It should be noted though
that the mean execution time for a short send and receive test with LINX signals was
much shorter than get bid() from OSEPL, which implies that using LINX could be
faster than POSIX message queues.
sender() that was benchmarked because of the somewhat complex implementation
in SoftApi does not show any major performance difference between the porting layers. The average execution time differed with just one clock cycle in favour of OSEPL.
It should be noted though that OSEPL had a more homogeneous execution time than
SoftApi in this test.
8.1.2
OSE Signaling Calls
In the signaling tests OSEPL is marginally faster than SoftApi on all calls. The main
difference between the porting layers when it comes to these calls are where the LINX
pointer is stored. Most likely the reason SoftApi is slower is because of the function calls
used to access the LINX pointer. In OSEPL this pointer can be accessed by the process
directly without the need of helper functions.
8.2
Conclusions
The main purpose of this paper was to explore the possibilities of running programs
written for OSE under Linux. In this paper I have shown that this is possible to accomplish using a porting layer like SoftApi or OSEPL. Neither of these porting layers can run
programs that are not compiled against their respective header files, and without knowledge about how macros and data types are defined in OSE, this limitation is probably
difficult to avoid.
Neither one of the porting layers is a clear winner in the performance tests. While
SoftApi performs better in everything except communication, the single-process design
makes it unreliable in production systems. OSEPL has better design when it comes to
multitasking, but still falls short on performance on process creation and termination.
Furthermore neither of the porting layers can handle system calls to processes on other
systems (see section 5.2.2). One way to solve that particular problem is to examine how
OSE behaves on those calls and mimic this functionality, either in the porting layer or
directly in LINX. That way it can be made compatible with OSE for clusters with mixed
Linux and OSE nodes. Another way (which may not be compatible with OSE) is to
dedicate a unused LINX signal number which tells the API that that particular message
should be handled by the API.
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
24
The recommendation to anyone who is interested in running OSE programs in Linux is
to develop a new porting layer. LINX is a good start for the interprocess communication
protocol but it will need to be modified if support for redirections is desired. The process
design from OSEPL where an OSE block is represented by a Linux process and an OSE
process is a POSIX thread is also recommended as it keeps the process hierarchy similar
between the platforms. It also isolates the OSE blocks from each other, so that if one
process crashes it will not affect the rest of the processes in the system.
Of course it is possible to go all the way and give every OSE process their own Linux
process, but processes are grouped together in a block for a reason. More often than not
does the processes within a block need each other for correct execution. If one of those
processes crashes the others can not continue to execute anyway. Furthermore it is faster
to create threads than processes, therefore using processes as blocks and threads as OSE
processes is a good compromise between stability and speed.
Since SoftApi stores the information of all processes within the API in shared memory
it is very fast for system calls that requests that information. It is probably not possible to create a porting layer that is as fast as SoftApi while still being able to execute
these system calls for processes running on external systems. It is more realistic that
the performance will be somewhere around the results for the test of get bid() or the
send/receive test on OSEPL.
8.3
Future Work
The work in this paper can easily be extended for a more complete comparison between
the systems. Aside from the performance measurement from OSE that did not make it
into this report, the real-time capabilities of Linux can be further examined, for example
by comparing the different scheduling methods in Linux. For the porting layers they still
need testing in the areas of correctness, stability and predictability.
This report has focused on single-node performance, but one of the advantages of OSE
is the clustering capabilities (especially for the signaling system), so functionality and
performance testing for multi-node systems should be of interest. In that aspect it would
also be interesting to know if it is possible to mix Linux and OSE nodes in a cluster, and
what impact that would have on the cluster as whole.
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
25
References
[1] M. Barabanov and V. Yodaiken. Real-time linux. Linux journal, 23, 1996.
[2] A. Barbalance, A. Luchetta, G. Manduchi, M. Moro, A. Soppelsa, and C. Taliercio.
Performance Comparison of VxWorks, Linux, RTAI and Xenomai in a Hard RealTime Application. IEEE TRANSACTIONS ON NUCLEAR SCIENCE, VOL. 55, NO.
1, February 2008.
[3] M. Barr and A. Massa. Programming embedded systems: with C and GNU development
tools. OReilly Media, Inc., 2006.
[4] M. Collberg and E. Hugne. Performance Monitoring using built in processor support in a complex real time environment. 2006.
[5] S. Dietrich and D. Walker. The evolution of real-time linux. In Proc. 7th Real-Time
Linux Workshop, 2005.
[6] Enea. OSE Application Programming Interface Reference Manual. 2004.
[7] Enea. OSE Real-Time Kernel.
http://www.enea.com/EPiBrowser/Literature%20(pdf)/Pdf/Not%20leadgenerating/
Datasheets%20and%20Brochures/OSE%20Real-time%20kernel.pdf (2010-01-27), 2005.
[8] Enea. Enea ose: Multicore real-time operating system (rtos).
http://www.enea.com/Templates/Product 27035.aspx (2010-02-12), 2010.
[9] Enea. LINX manual pages.
http://linx.sourceforge.net/linxdoc/doc/linxmanpages.pdf (2010-01-20), 2010.
[10] P. Gerum. Xenomai-Implementing a RTOS emulation framework on GNU/Linux.
2004.
[11] M. Krekola and T. Nilsson. Event-driven Performance Measurements and Analysis
of Complex Real-time Systems. 2007.
[12] P. Laplante. REAL-TIME SYSTEMS DESIGN & ANALYSIS. Wiley India Pvt. Ltd.,
2006.
[13] A. Malony and S. Shende. Performance technology for complex parallel and distributed systems. Distributed and parallel systems: from instruction parallelism to cluster
computing, pages 3746, 2000.
[14] P. Mantegazza, E. Dozio, and S. Papacharalambous. RTAI: Real time application
interface. Linux Journal, 2000(72es):10, 2000.
[15] I. Molyneaux. The Art of Application Performance Testing. OReilly Media, Inc., 2009.
[16] P. Raghavan, A. Lad, and S. Neelakandan. Embedded Linux system design and development. Auerbach Pub, 2005.
[17] O. R. Simon Boman. Replacing OSE with Real Time capable Linux. 2009.
[18] V. Sjoblom.
OSE and Linux: A study about performance. 2008.
[19] N. Storey. Safety critical computer systems. Addison-Wesley Longman Publishing Co.,
Inc. Boston, MA, USA, 1996.
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
26
[20] A. Tanenbaum and A. Tannenbaum. Modern operating systems. Prentice Hall Englewood Cliffs, NJ, 2001.
[21] W. Weinberg. Moving Legacy Applications to Linux: RTOS Migration Revisited,
2008.
[22] Wikipedia. List of operating systems.
http://en.wikipedia.org/wiki/List of operating systems#Embedded (2010-02-18), 2010.
[23] Wine Wiki. Debunking wine myths.
http://wiki.winehq.org/Debunking Wine Myths (2010-02-18), 2010.
[24] K. Yaghmour, J. Masters, P. Gerum, and G. Ben-Yossef. Building embedded linux systems. OReilly Media, Inc., 2008.
[25] V. Yodaiken. The rtlinux manifesto. In Proc. of the 5th Linux Expo. Citeseer, 1999.
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
Appendices
A
Tests
The following three source code files contain the source code for the benchmark tests I
have done. It is not the complete program, but only the parts that are relevant to how
the measurement was done.
A.1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
# ifndef
# define
tests.h
TESTS H
TESTS H
/
Some c o n f i g u r e o p t i o n s f o r t h e t e s t s
/
# define SIZE SMALL 1024
# define SIZE LARGE 1000000
# define MSG TINY 128
# define MSG SMALL 1024
# define MSG LARGE 4096
# define ITERATIONS 1000
/ where t o s t o r e f i l e s , without t r a i l i n g s l a s h /
# define FILE PATH .
# define NAME SIZE 64
/
End o f c o n f i g u r a b l e o p t i o n s
/
# define PING SIG 0 x32
struct ping sig
{
SIGSELECT s i g n o ;
};
union SIGNAL
{
SIGSELECT s i g n o ;
s t r u c t p i n g s i g ping ;
};
s t r u c t bench t
{
char f i l e [ NAME SIZE ] ;
u i n t 6 4 t bench max ;
u i n t 6 4 t bench min ;
u i n t 6 4 t bench mean ;
uint64 t bench total ;
u i n t 6 4 t b e n c h v a l u e s [ ITERATIONS ] ;
};
# define BENCH( PRE TEST , TEST , POST TEST , BENCH STRUCT) \
{ \
u i n t 3 2 t s up , s low , e up , e low ; \
u i n t 6 4 t b e n c h t o t a l , bench max , bench min ; \
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
u i n t 6 4 t bench values ; \
int i = 0; \
bench total = 0; \
bench max = 0 ; \
bench min = UINT64 MAX ; \
b e n c h v a l u e s = BENCH STRUCT>b e n c h v a l u e s ; \
while ( i < ITERATIONS ) \
{ \
PRE TEST \
g e t t i m e (&s up , &s low ) ; \
TEST \
g e t t i m e (&e up , &e low ) ; \
POST TEST \
b e n c h v a l u e s [ i ] = g e t d i f f ( s up , s low , e up , e low ) ; \
\
i f ( b e n c h v a l u e s [ i ] < bench min ) \
bench min = b e n c h v a l u e s [ i ] ; \
i f ( b e n c h v a l u e s [ i ] > bench max ) \
bench max = b e n c h v a l u e s [ i ] ; \
b e n c h t o t a l += b e n c h v a l u e s [ i ] ; \
i ++;\
} \
BENCH STRUCT>bench mean = b e n c h t o t a l /ITERATIONS ; \
BENCH STRUCT>b e n c h t o t a l = b e n c h t o t a l ; \
BENCH STRUCT>bench min = bench min ; \
BENCH STRUCT>bench max = bench max ; \
}
void w r i t e r e s u l t ( s t r u c t b e n c h t r e s u l t ) ;
struct
struct
struct
struct
struct
struct
struct
struct
struct
struct
struct
struct
struct
struct
t
t
t
t
t
t
t
t
t
t
t
t
t
t
bench overhead ( s t r u c t b e n c h t r e s u l t ) ;
bench memcpy ( s t r u c t b e n c h t r e s u l t , s i z e t c p y s i z e ) ;
bench memcpy2 ( s t r u c t b e n c h t r e s u l t , s i z e t c p y s i z e ) ;
bench memset ( s t r u c t b e n c h t r e s u l t , s i z e t s i z e ) ;
bench free ( s t r u c t bench t result , s i z e t size ) ;
bench malloc ( s t r u c t b e n c h t r e s u l t , s i z e t s i z e ) ;
bench memmove ( s t r u c t b e n c h t r e s u l t , s i z e t c p y s i z e ) ;
bench memmove2 ( s t r u c t b e n c h t r e s u l t , s i z e t c p y s i z e ) ;
bench send ( s t r u c t b e n c h t r e s u l t , PROCESS pid , s i z e t s i z e ) ;
b e n c h r e c e i v e ( s t r u c t b e n c h t r e s u l t , PROCESS pid , s i z e t s i z e ) ;
b e n c h s e n d r e c e i v e ( s t r u c t b e n c h t r e s u l t , PROCESS pid , s i z e t s i z e ) ;
b e n c h g e t b i d ( s t r u c t b e n c h t r e s u l t , PROCESS pid ) ;
b e n c h c r e a t e p r o c e s s ( s t r u c t b e n c h t r e s u l t , OSENTRYPOINT e n t r y p o i n t ) ;
b e n c h k i l l p r o c ( s t r u c t b e n c h t r e s u l t , OSENTRYPOINT e n t r y p o i n t ) ;
/ timing /
u i n t 6 4 t g e t d i f f ( u i n t 3 2 t s up , u i n t 3 2 t s low , u i n t 3 2 t e up , u i n t 3 2 t e low ) ;
u i n t 6 4 t combine ( u i n t 3 2 t up , u i n t 3 2 t low ) ;
void g e t t i m e ( u i n t 3 2 t up , u i n t 3 2 t low ) ;
# endif
A.2
1
2
3
4
5
6
7
8
9
10
11
12
13
14
bench
bench
bench
bench
bench
bench
bench
bench
bench
bench
bench
bench
bench
bench
timing.c
# include <s t d i n t . h>
/
g e t how many c l o c k c y k l e s h a s
s p e c i f i c and w o r k s on p o w e r p c
and x86 / x 8 6 6 4 .
\param up p o i n t e r t o a 32 b i t
\param low p o i n t e r t o a 32 b i t
/
passed s i n c e boot . This i s a r c h i t e c t u r e
( i f POWERPC i s d e f i n e d a t c o m p i l e t i m e )
i n t to s t o r e th e upper value
int to s t o r e the lower value .
void g e t t i m e ( u i n t 3 2 t up , u i n t 3 2 t low )
{
# i f d e f POWERPC
u i n t 3 2 t tmp ;
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
II
School of Innovation, Design and Engineering
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
do
{
asm
v o l a t i l e ( mftbu %[up ]
: [ up ] = r (up )
:
);
asm
v o l a t i l e ( mftb %[low ]
: [ low ] = r ( low )
:
);
asm
v o l a t i l e ( mftbu %[tmp ]
: [ tmp ] = r ( tmp )
:
);
} while ( tmp ! = up ) ;
# else
u i n t 6 4 t tmp ;
asm
volatile ( rdtsc
: =A ( tmp )
);
low = tmp ;
up = tmp>>32;
# endif
}
/
c o m b i n e two 32 b i t u n s i g n e d i n t e g e r t o a s i n g l e 64 b i t .
\param up u p p e r v a l u e
\param low l o w e r v a l u e
\ r e t u r n a 64 b i t i n t w i t h t h e c o m b i n e d v a l u e .
/
u i n t 6 4 t combine ( u i n t 3 2 t up , u i n t 3 2 t low )
{
u i n t 6 4 t r e t = up ;
r e t <<= 3 2 ;
r e t +=low ;
return r e t ;
}
/
r e t u r n t h e t i m e d i f f e r e n c e b e t w e e n two i n t e r v a l s .
\param s u p u p p e r v a l u e f o r s t a r t
\param s l o w l o w e r v a l u e f o r s t a r t
\param e u p u p p e r v a l u e f o r end
\param e l o w l o w e r v a l u e f o r end
\ r e t u r n a 64 b i t u n s i g n e d i n t w i t h t h e d i f f e r e n c e .
/
u i n t 6 4 t g e t d i f f ( u i n t 3 2 t s up , u i n t 3 2 t s low , u i n t 3 2 t e up , u i n t 3 2 t e low )
{
uint64 t ret ;
r e t = combine ( e up , e low)combine ( s up , s low ) ;
return r e t ;
}
A.3
1
2
3
4
5
6
7
tests.c
# include
# include
# include
# include
<ose . h>
<t e s t s . h>
<s t r i n g . h>
<s t d i o . h>
void w r i t e r e s u l t ( s t r u c t b e n c h t r e s u l t )
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
III
IV
School of Innovation, Design and Engineering
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
{
FILE fd ;
char tmp [ 3 2 ] ;
int i ;
fd = fopen ( r e s u l t >f i l e , w ) ;
f o r ( i = 0 ; i < ITERATIONS ; i ++)
{
s n p r i n t f ( tmp , 3 2 , %l l u \n , r e s u l t >b e n c h v a l u e s [ i ] ) ;
f w r i t e ( tmp , s t r l e n ( tmp ) , 1 , fd ) ;
}
f c l o s e ( fd ) ;
}
s t r u c t b e n c h t bench overhead ( s t r u c t b e n c h t r e s u l t )
{
s n p r i n t f ( r e s u l t >f i l e , NAME SIZE , %s/%s , FILE PATH ,
BENCH(
,
,
,
result
);
return
func
);
result ;
}
s t r u c t b e n c h t bench malloc ( s t r u c t b e n c h t r e s u l t , s i z e t s i z e )
{
s n p r i n t f ( r e s u l t >f i l e , NAME SIZE , %s/%s %d , FILE PATH ,
func
BENCH(
void t e s t ;
,
t e s t = malloc ( s i z e ) ;
,
i f ( t e s t == NULL)
r e t u r n NULL;
free ( test ) ;
,
result
);
return
, size ) ;
result ;
}
s t r u c t bench t bench free ( s t r u c t bench t result , s i z e t size )
{
s n p r i n t f ( r e s u l t >f i l e , NAME SIZE , %s/%s %d , FILE PATH ,
func
BENCH(
void t e s t ;
t e s t = malloc ( s i z e ) ;
i f ( t e s t == NULL)
r e t u r n NULL;
,
free ( test ) ;
,
,
result
);
return
, size ) ;
result ;
}
s t r u c t b e n c h t bench memset ( s t r u c t b e n c h t r e s u l t , s i z e t s i z e )
{
s n p r i n t f ( r e s u l t >f i l e , NAME SIZE , %s/%s %d , FILE PATH ,
func
BENCH(
void t e s t ;
t e s t = malloc ( s i z e ) ;
i f ( t e s t == NULL)
r e t u r n NULL;
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
, size ) ;
School of Innovation, Design and Engineering
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
,
memset ( t e s t , 1 2 3 , s i z e ) ;
,
free ( test ) ;
,
result
);
return
result ;
}
s t r u c t b e n c h t bench memcpy ( s t r u c t b e n c h t r e s u l t , s i z e t c p y s i z e )
{
s n p r i n t f ( r e s u l t >f i l e , NAME SIZE , %s/%s %d , FILE PATH ,
func , cpy size ) ;
BENCH(
i n t index ;
void t e s t ;
void p t r ;
t e s t = malloc ( c p y s i z e 2 ) ;
i f ( t e s t == NULL)
r e t u r n NULL;
memset ( t e s t , 1 2 3 , c p y s i z e ) ;
ptr = t e s t +cpy size ;
,
memcpy( ptr , t e s t , c p y s i z e ) ;
,
f o r ( index = 0 ; index < c p y s i z e 2 ; index ++)
i f ( ( ( char ) t e s t ) [ index ] ! = 1 2 3 )
r e t u r n NULL;
free ( test ) ;
,
result
);
return
result ;
}
s t r u c t b e n c h t bench memcpy2 ( s t r u c t b e n c h t r e s u l t , s i z e t c p y s i z e )
{
s n p r i n t f ( r e s u l t >f i l e , NAME SIZE , %s/%s %d , FILE PATH ,
func , cpy size ) ;
BENCH(
i n t index ;
void t e s t ;
void p t r ;
t e s t = malloc ( c p y s i z e 2 ) ;
i f ( t e s t == NULL)
r e t u r n NULL;
ptr = t e s t +cpy size ;
memset ( ptr , 1 2 3 , c p y s i z e ) ;
,
memcpy( t e s t , ptr , c p y s i z e ) ;
,
f o r ( index = 0 ; index < c p y s i z e 2 ; index ++)
i f ( ( ( char ) t e s t ) [ index ] ! = 1 2 3 )
r e t u r n NULL;
free ( test ) ;
,
result
);
return
result ;
}
s t r u c t b e n c h t bench memmove ( s t r u c t b e n c h t r e s u l t , s i z e t c p y s i z e )
{
s n p r i n t f ( r e s u l t >f i l e , NAME SIZE , %s/%s %d , FILE PATH ,
func , cpy size ) ;
BENCH(
i n t index ;
void t e s t ;
void p t r ;
t e s t = malloc ( c p y s i z e 1 . 5 ) ;
i f ( t e s t == NULL)
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
School of Innovation, Design and Engineering
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
r e t u r n NULL;
p t r = t e s t +( c p y s i z e / 2 ) ;
memset ( t e s t , 1 2 3 , c p y s i z e ) ;
,
memmove( ptr , t e s t , c p y s i z e ) ;
,
f o r ( index = 0 ; index < c p y s i z e 1 . 5 ; index ++)
i f ( ( ( char ) t e s t ) [ index ] ! = 1 2 3 )
r e t u r n NULL;
free ( test ) ;
,
result
);
return
result ;
}
s t r u c t b e n c h t bench memmove2 ( s t r u c t b e n c h t r e s u l t , s i z e t c p y s i z e )
{
s n p r i n t f ( r e s u l t >f i l e , NAME SIZE , %s/%s %d , FILE PATH ,
func , cpy size ) ;
BENCH(
i n t index ;
void t e s t ;
void p t r ;
t e s t = malloc ( c p y s i z e 1 . 5 ) ;
i f ( t e s t == NULL)
r e t u r n NULL;
p t r = t e s t +( c p y s i z e / 2 ) ;
memset ( ptr , 1 2 3 , c p y s i z e ) ;
,
memmove( t e s t , ptr , c p y s i z e ) ;
,
f o r ( index = 0 ; index < c p y s i z e 1 . 5 ; index ++)
i f ( ( ( char ) t e s t ) [ index ] ! = 1 2 3 )
r e t u r n NULL;
free ( test ) ;
,
result
);
return
result ;
}
s t r u c t b e n c h t b e n c h c r e a t e p r o c e s s ( s t r u c t b e n c h t r e s u l t , OSENTRYPOINT e n t r y p o i n t )
{
s n p r i n t f ( r e s u l t >f i l e , NAME SIZE , %s/%s , FILE PATH ,
func ) ;
BENCH(
PROCESS pid ;
,
pid = c r e a t e p r o c e s s ( OS PRI PROC , t e s t p r o c , e n t r y p o i n t , 1 0 0 0 , 1 5 , 0 , 0 , 0 , 0 , 0 ) ;
,
k i l l p r o c ( pid ) ;
,
result
);
return
result ;
}
s t r u c t b e n c h t b e n c h k i l l p r o c ( s t r u c t b e n c h t r e s u l t , OSENTRYPOINT e n t r y p o i n t )
{
s n p r i n t f ( r e s u l t >f i l e , NAME SIZE , %s/%s , FILE PATH ,
func ) ;
BENCH(
PROCESS pid ;
pid = c r e a t e p r o c e s s ( OS PRI PROC , t e s t p r o c , e n t r y p o i n t , 1 0 0 0 , 1 5 , 0 , 0 , 0 , 0 , 0 ) ;
,
k i l l p r o c ( pid ) ;
,
,
result
);
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
VI
VII
School of Innovation, Design and Engineering
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
return
result ;
}
s t r u c t b e n c h t bench sender ( s t r u c t b e n c h t r e s u l t , PROCESS pid )
{
SIGSELECT s i g s e l a n y [ ] = { 0 } ;
s n p r i n t f ( r e s u l t >f i l e , NAME SIZE , %s/%s , FILE PATH ,
func
);
BENCH(
union SIGNAL s i g ;
s i g = a l l o c ( s i z e o f ( s t r u c t p i n g s i g ) , PING SIG ) ;
send(& s i g , pid ) ;
sig = receive ( sigsel any ) ;
,
pid = sender (& s i g ) ;
,
f r e e b u f (& s i g ) ;
,
result
);
return
result ;
}
s t r u c t b e n c h t bench send ( s t r u c t b e n c h t r e s u l t , PROCESS pid , s i z e t s i z e )
{
SIGSELECT s i g s e l a n y [ ] = { 0 } ;
s n p r i n t f ( r e s u l t >f i l e , NAME SIZE , %s/%s %d , FILE PATH ,
func
, size ) ;
BENCH(
union SIGNAL s i g ;
s i g = a l l o c ( s i z e , PING SIG ) ;
,
send(& s i g , pid ) ;
,
sig = receive ( sigsel any ) ;
f r e e b u f (& s i g ) ;
,
result
);
return
result ;
}
s t r u c t b e n c h t b e n c h r e c e i v e ( s t r u c t b e n c h t r e s u l t , PROCESS pid , s i z e t s i z e )
{
SIGSELECT s i g s e l a n y [ ] = { 0 } ;
s n p r i n t f ( r e s u l t >f i l e , NAME SIZE , %s/%s %d , FILE PATH ,
func
, size ) ;
BENCH(
union SIGNAL s i g ;
s i g = a l l o c ( s i z e , PING SIG ) ;
send(& s i g , pid ) ;
,
sig = receive ( sigsel any ) ;
,
f r e e b u f (& s i g ) ;
,
result
);
return
result ;
}
s t r u c t b e n c h t b e n c h s e n d r e c e i v e ( s t r u c t b e n c h t r e s u l t , PROCESS pid , s i z e t s i z e )
{
SIGSELECT s i g s e l a n y [ ] = { 0 } ;
s n p r i n t f ( r e s u l t >f i l e , NAME SIZE , %s/%s %d , FILE PATH ,
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
func
, size ) ;
VIII
School of Innovation, Design and Engineering
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
BENCH(
union SIGNAL s i g ;
s i g = a l l o c ( s i z e , PING SIG ) ;
,
send(& s i g , pid ) ;
sig = receive ( sigsel any ) ;
,
f r e e b u f (& s i g ) ;
,
result
);
return
result ;
}
s t r u c t b e n c h t b e n c h g e t b i d ( s t r u c t b e n c h t r e s u l t , PROCESS pid )
{
s n p r i n t f ( r e s u l t >f i l e , NAME SIZE , %s/%s , FILE PATH ,
BENCH(
,
g e t b i d ( pid ) ;
,
,
result
);
return
result ;
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
func
);
School of Innovation, Design and Engineering
Test Values
Available for authorized individuals only.
Fredrik Eriksson
E-Mail: fen05001@student.mdh.se
Phone: 0733-729 828
IX
You might also like
- The Operating System (OS) : Unit 4Document12 pagesThe Operating System (OS) : Unit 4Hoan NguyễnNo ratings yet
- Chapter 8 System Software and OS - Full NotesDocument26 pagesChapter 8 System Software and OS - Full NotesNour MuneerNo ratings yet
- Embedded Operating System Research PaperDocument4 pagesEmbedded Operating System Research Paperfve0mx2y100% (1)
- SoftwareDocument10 pagesSoftwarejoshuabalewabandaNo ratings yet
- Department of Computer Engineering: Vijay T. PatilDocument100 pagesDepartment of Computer Engineering: Vijay T. Patilsakshi ladNo ratings yet
- Linux Operating System Term PaperDocument5 pagesLinux Operating System Term Paperc5qd4nn8100% (1)
- CS 330 Operating Systems - Lab ManualDocument68 pagesCS 330 Operating Systems - Lab ManualMohsin AliNo ratings yet
- English For ItDocument14 pagesEnglish For Itpatri_erNo ratings yet
- Operating Systems & Gui: in This Lesson Students Will: Get Familiar With The Following TermsDocument9 pagesOperating Systems & Gui: in This Lesson Students Will: Get Familiar With The Following TermsMeiNo ratings yet
- Final Year ProjectDocument60 pagesFinal Year ProjectMeMyselfNo ratings yet
- CSC208 Group Assignment PrintDocument15 pagesCSC208 Group Assignment PrintCheston ShimNo ratings yet
- User93 ScreenDocument304 pagesUser93 Screenkihije6124No ratings yet
- Chapter5 Ingles TecnicoDocument6 pagesChapter5 Ingles TecnicowhitemerNo ratings yet
- DepikDocument8 pagesDepikCharak Ram SNo ratings yet
- Operating Systems & Gui: in This Lesson Students Will: Get Familiar With The Following TermsDocument9 pagesOperating Systems & Gui: in This Lesson Students Will: Get Familiar With The Following Termskyu haiNo ratings yet
- Unit 14: A. Reading Comprehension - 5 Operating Systems: Hidden SoftwareDocument4 pagesUnit 14: A. Reading Comprehension - 5 Operating Systems: Hidden SoftwareMuhammad Rizky Andriansyah SurataNo ratings yet
- Textbook UNIT 8 + UNIT 9Document25 pagesTextbook UNIT 8 + UNIT 9Thanh Bình ĐàoNo ratings yet
- Patna University PhD Coursework lecture1Document20 pagesPatna University PhD Coursework lecture1ANURAG RAKESHNo ratings yet
- Java IntroDocument53 pagesJava IntroHise WiseNo ratings yet
- Career Guru99 ComDocument20 pagesCareer Guru99 ComMithun DebnathNo ratings yet
- !! Vorlesung Intro - To - Vms - NotesDocument47 pages!! Vorlesung Intro - To - Vms - NotesStefan BoehmerNo ratings yet
- OspndDocument97 pagesOspndhoangdo11122002No ratings yet
- Essential embedded systems development tools like Proteus and code generatorsDocument3 pagesEssential embedded systems development tools like Proteus and code generatorsJoe NoronhaNo ratings yet
- Software SystemsDocument298 pagesSoftware SystemsShawn Barron100% (1)
- Basics of Computer Hardware and Networking Lab ManualDocument67 pagesBasics of Computer Hardware and Networking Lab ManualArun JyothiNo ratings yet
- Em LinuxDocument10 pagesEm LinuxHakim KimoNo ratings yet
- LinuexDocument4 pagesLinuexSaurabh SisodiaNo ratings yet
- Mca SynopsisDocument28 pagesMca SynopsisRajbeer Kumar DasNo ratings yet
- LPI Certification 102 (Release 2) Exam Prep, Part 4Document19 pagesLPI Certification 102 (Release 2) Exam Prep, Part 4api-3759734No ratings yet
- Intro To x86Document25 pagesIntro To x86Karim NiniNo ratings yet
- How a microprocessor executes a program in RAMDocument16 pagesHow a microprocessor executes a program in RAMismail253No ratings yet
- A Linux Based Real Time Operating SystemDocument43 pagesA Linux Based Real Time Operating SystemRicky Rediansyah100% (1)
- GUI Operating Systems SummaryDocument9 pagesGUI Operating Systems Summaryalfina rosyidaNo ratings yet
- CIT 215 Intro To Programming Languages - 1 PDFDocument196 pagesCIT 215 Intro To Programming Languages - 1 PDFjustin onagaNo ratings yet
- System Programming: Using Linux and C++Document32 pagesSystem Programming: Using Linux and C++Usra AltijaniNo ratings yet
- Week 6 OS IntrodcutionDocument2 pagesWeek 6 OS IntrodcutionThương ThảoNo ratings yet
- Building Embedded Linux Systems 2nd EditDocument564 pagesBuilding Embedded Linux Systems 2nd EditSILA LENA EmmanuelNo ratings yet
- Operating Systems & NetworkingDocument53 pagesOperating Systems & NetworkingRussell SmithNo ratings yet
- LPI Certification 102 Exam Prep, Part 3Document30 pagesLPI Certification 102 Exam Prep, Part 3api-3718184No ratings yet
- Functions of Operating SystemDocument4 pagesFunctions of Operating SystemJitendra PradhanNo ratings yet
- Operating Systems From 0 To 1 PT1Document200 pagesOperating Systems From 0 To 1 PT1Islam TazeroutNo ratings yet
- Operating Systems From 0 To 1Document309 pagesOperating Systems From 0 To 1mcs mNo ratings yet
- Android Ad Hoc - Full - Must ReadDocument260 pagesAndroid Ad Hoc - Full - Must ReadBhoj Raj AcharyaNo ratings yet
- Operating Systems From 0 To 1Document309 pagesOperating Systems From 0 To 1ChristianNo ratings yet
- FPT University University of Greenwich: Lecturer: Do Quoc BinhDocument14 pagesFPT University University of Greenwich: Lecturer: Do Quoc BinhVo QuangNo ratings yet
- C, C++ Programming Tips: Vishal Patil Summer 2003Document21 pagesC, C++ Programming Tips: Vishal Patil Summer 2003mohanty_anantakumar6332No ratings yet
- Mak Ing VPN Client Modules Platform IndependentDocument56 pagesMak Ing VPN Client Modules Platform IndependentAtinus VadayNo ratings yet
- MSDOS Programming InfoDocument631 pagesMSDOS Programming Infopzpanzer101No ratings yet
- Visual ProgrammingDocument315 pagesVisual ProgrammingShubham SinghNo ratings yet
- Operating Systems From 0 To 1Document309 pagesOperating Systems From 0 To 1Ku HanNo ratings yet
- Ecopy Desktop™: Installation GuideDocument48 pagesEcopy Desktop™: Installation GuideYahya ZiyanNo ratings yet
- Lpi8 PDFDocument30 pagesLpi8 PDFjadg0070scribdNo ratings yet
- COE 205 Lab ManualDocument110 pagesCOE 205 Lab Manualmadhu1983aug30No ratings yet
- Recommendation Report EPCDocument13 pagesRecommendation Report EPCDon JoeNo ratings yet
- Assignment 03 - Itd 12103: Introductions To Information TechnologyDocument9 pagesAssignment 03 - Itd 12103: Introductions To Information TechnologyAimanAzNo ratings yet
- Research Paper On Embedded Operating SystemsDocument5 pagesResearch Paper On Embedded Operating Systemszeiqxsbnd100% (1)
- Mobile Operating System Research PaperDocument4 pagesMobile Operating System Research Paperkifmgbikf100% (1)
- DAY STAR SCHOOL COMPUTERS: Understanding Operating SystemsDocument10 pagesDAY STAR SCHOOL COMPUTERS: Understanding Operating SystemsNoe ErazoNo ratings yet
- Linux: A complete guide to Linux command line for beginners, and how to get started with the Linux operating system!From EverandLinux: A complete guide to Linux command line for beginners, and how to get started with the Linux operating system!No ratings yet
- CCNA 2 - 3th Ed Web Chapter 09Document59 pagesCCNA 2 - 3th Ed Web Chapter 09clu5t3rNo ratings yet
- CCNA 2 - 3th Ed Web Chapter 02Document31 pagesCCNA 2 - 3th Ed Web Chapter 02clu5t3rNo ratings yet
- Black Ops 2008 - It's The End of The Cache As We Know ItDocument107 pagesBlack Ops 2008 - It's The End of The Cache As We Know Itclu5t3rNo ratings yet
- CCNASecurity Ch5Document77 pagesCCNASecurity Ch5ApPle PleNo ratings yet
- Intermediate Use of Packet TracerDocument46 pagesIntermediate Use of Packet TracermagicanordNo ratings yet
- 802.11 Wireless LANsDocument50 pages802.11 Wireless LANsclu5t3rNo ratings yet
- F5 - Module 2 Traffic ProcessingDocument20 pagesF5 - Module 2 Traffic Processingclu5t3rNo ratings yet
- Cryptography & Computer Security Cs265 - TkipDocument6 pagesCryptography & Computer Security Cs265 - Tkipclu5t3rNo ratings yet
- CCNA 2 - 3th Ed Web Chapter 11Document38 pagesCCNA 2 - 3th Ed Web Chapter 11clu5t3rNo ratings yet
- An Inductive Chosen Plaintext Attack Against WEP-WEP2Document18 pagesAn Inductive Chosen Plaintext Attack Against WEP-WEP2clu5t3rNo ratings yet
- CCNA 2 - 3th Ed Web Chapter 10Document28 pagesCCNA 2 - 3th Ed Web Chapter 10clu5t3rNo ratings yet
- Cisco Network Collector Quick Start Guide For As Transactional CustomersDocument30 pagesCisco Network Collector Quick Start Guide For As Transactional Customersclu5t3rNo ratings yet
- Lab 8 Packet Tracer VersionDocument6 pagesLab 8 Packet Tracer VersionOsGuIsNo ratings yet
- Complete Lab Manual For CCNP PDFDocument315 pagesComplete Lab Manual For CCNP PDFtoto161616100% (2)
- Wireless Lab - Packet TracerDocument4 pagesWireless Lab - Packet Tracermirzasoroush67No ratings yet
- Practical Attacks Against MPLS or Carrier Ethernet NetworksDocument35 pagesPractical Attacks Against MPLS or Carrier Ethernet Networksclu5t3rNo ratings yet
- Cisco - Designing MPLS Layer3 VPN NetworksDocument126 pagesCisco - Designing MPLS Layer3 VPN Networksclu5t3rNo ratings yet
- CCNA Security - Student Packet Tracer ManualDocument40 pagesCCNA Security - Student Packet Tracer Manualpulsar200450% (4)
- Fortianalyzer V5.0 Patch Release 6: Administration GuideDocument218 pagesFortianalyzer V5.0 Patch Release 6: Administration Guideclu5t3rNo ratings yet
- Cisco - Lab 8.5.4.1 - Configure Enterprise Securityon APDocument10 pagesCisco - Lab 8.5.4.1 - Configure Enterprise Securityon APclu5t3rNo ratings yet
- CCNA Security 1.0.1: Student Packet Tracer ManualDocument40 pagesCCNA Security 1.0.1: Student Packet Tracer Manualwejooo100% (1)
- Cryptographic Module Based Approach For Password Hashing SchemesDocument19 pagesCryptographic Module Based Approach For Password Hashing Schemesclu5t3rNo ratings yet
- Cisco - Labs 1.6.1 - Packet Tracer Skills Integration ChallengeDocument3 pagesCisco - Labs 1.6.1 - Packet Tracer Skills Integration Challengeclu5t3rNo ratings yet
- Porting OSE Systems To LinuxDocument39 pagesPorting OSE Systems To Linuxclu5t3rNo ratings yet
- Packet Tracer Skills Integration ChallengeDocument7 pagesPacket Tracer Skills Integration Challengekaloi0303No ratings yet
- Waf Bypassing by RafaybalochDocument33 pagesWaf Bypassing by Rafaybalochsiwoti123No ratings yet
- Core Impact 7.5Document214 pagesCore Impact 7.5clu5t3r100% (1)
- Forensic Toolkit: Sales and Promotional SummaryDocument8 pagesForensic Toolkit: Sales and Promotional Summaryclu5t3rNo ratings yet
- FortiAnalyzer v5.0 Patch Release 6 Administration GuideDocument14 pagesFortiAnalyzer v5.0 Patch Release 6 Administration Guideclu5t3rNo ratings yet
- Exploiting Tomorrow's Internet Today with IPv6 Penetration TestingDocument8 pagesExploiting Tomorrow's Internet Today with IPv6 Penetration TestingBharath KumarNo ratings yet