You might also like
- Hardware-In-The-loop Simulation of The EAST PF Converterfor PF Control System UpgradeDocument10 pagesHardware-In-The-loop Simulation of The EAST PF Converterfor PF Control System UpgradeYans PangerunganNo ratings yet
- Real Time Detection of Cache-Based Side-Channel Attacks Using Hardware Performance CountersDocument45 pagesReal Time Detection of Cache-Based Side-Channel Attacks Using Hardware Performance CountersYans PangerunganNo ratings yet
- Real-Time Star Identification Using Synthetic Radial Pattern and Its Hardware ImplementationDocument9 pagesReal-Time Star Identification Using Synthetic Radial Pattern and Its Hardware ImplementationYans PangerunganNo ratings yet
- A Hardware in The Loop Simulation Testb e D For Vision-Based Leader-Follower Formation FlightDocument10 pagesA Hardware in The Loop Simulation Testb e D For Vision-Based Leader-Follower Formation FlightYans PangerunganNo ratings yet
- A Multi-Level Approach To Understanding The Impact of Cyber Crime On The Financial SectorDocument32 pagesA Multi-Level Approach To Understanding The Impact of Cyber Crime On The Financial SectorYans PangerunganNo ratings yet
- Effectiveness of A Hardware-Based Approach To Detect Resistive-Open Defects in SRAM Cells Under Process VariationsDocument9 pagesEffectiveness of A Hardware-Based Approach To Detect Resistive-Open Defects in SRAM Cells Under Process VariationsYans PangerunganNo ratings yet
- A Lightweight Live Memory Forensic Approach Based On Hardware VirtualizationDocument32 pagesA Lightweight Live Memory Forensic Approach Based On Hardware VirtualizationYans PangerunganNo ratings yet
- Hardware Implementation of An ArtiÞcial Neural Network Model To Predict The Energy Production of A Photovoltaic SystemDocument16 pagesHardware Implementation of An ArtiÞcial Neural Network Model To Predict The Energy Production of A Photovoltaic SystemYans PangerunganNo ratings yet
- Energy Efficiency of Sequence Alignment Tools-Software and Hardware PerspectivesDocument11 pagesEnergy Efficiency of Sequence Alignment Tools-Software and Hardware PerspectivesYans PangerunganNo ratings yet
- A Hardened Network-On-chip Design Using RuntimeDocument29 pagesA Hardened Network-On-chip Design Using RuntimeYans PangerunganNo ratings yet
- SoTE Strategy of Triple-E On Solving Trojan Defense in Cyber-Crime CasesDocument8 pagesSoTE Strategy of Triple-E On Solving Trojan Defense in Cyber-Crime CasesYans PangerunganNo ratings yet
- Police Investigation Processes Practical Tools and Techniques For Tackling Cyber CrimesDocument9 pagesPolice Investigation Processes Practical Tools and Techniques For Tackling Cyber CrimesYans Pangerungan100% (1)
- Ascon Hardware Implementations and Side-Channel EvaluationDocument10 pagesAscon Hardware Implementations and Side-Channel EvaluationYans PangerunganNo ratings yet
- Nothing Ventured, Nothing Gained. Profiles of Online Activity, Cyber-Crime Exposure, and Security Measures of End-Users in European Union PDFDocument15 pagesNothing Ventured, Nothing Gained. Profiles of Online Activity, Cyber-Crime Exposure, and Security Measures of End-Users in European Union PDFYans PangerunganNo ratings yet
- SoTE Strategy of Triple-E On Solving Trojan Defense in Cyber-Crime CasesDocument8 pagesSoTE Strategy of Triple-E On Solving Trojan Defense in Cyber-Crime CasesYans PangerunganNo ratings yet
- Measures of Retaining Digital Evidence To Prosecute Computer Based Cyber-CrimesDocument8 pagesMeasures of Retaining Digital Evidence To Prosecute Computer Based Cyber-CrimesYans PangerunganNo ratings yet
- Cyber Crime Identity TheftDocument5 pagesCyber Crime Identity TheftYans Pangerungan100% (2)
- A Cyber-Crime Investigation FrameworkDocument6 pagesA Cyber-Crime Investigation FrameworkYans PangerunganNo ratings yet
- Criminal Profiling and Insider Cyber CrimeDocument7 pagesCriminal Profiling and Insider Cyber CrimeYans PangerunganNo ratings yet
- Antioxidant and Anti-Platelet Properties of Milk From Goat, Donkey and Cow: An in Vitro, Ex Vivo and in Vivo StudyDocument6 pagesAntioxidant and Anti-Platelet Properties of Milk From Goat, Donkey and Cow: An in Vitro, Ex Vivo and in Vivo StudyYans PangerunganNo ratings yet
- Ex Vivo Digestion of Raw, Pasteurised and Homogenised Milk - Effects On Lipolysis and ProteolysisDocument21 pagesEx Vivo Digestion of Raw, Pasteurised and Homogenised Milk - Effects On Lipolysis and ProteolysisYans PangerunganNo ratings yet
- Ex Vivo Digestion of Proteins and Fat in Buffalo MilkDocument38 pagesEx Vivo Digestion of Proteins and Fat in Buffalo MilkYans PangerunganNo ratings yet
- Ex Vivo Digestion of Omega-3 Enriched Buffalo Skimmed MilkDocument10 pagesEx Vivo Digestion of Omega-3 Enriched Buffalo Skimmed MilkYans PangerunganNo ratings yet
- Assessment of Immune Response in Periparturient Dairy Cows Using Ex Vivo Whole Blood Stimulation Assay With Lipopolysaccharides and Carrageenan Skin TestDocument8 pagesAssessment of Immune Response in Periparturient Dairy Cows Using Ex Vivo Whole Blood Stimulation Assay With Lipopolysaccharides and Carrageenan Skin TestYans PangerunganNo ratings yet
- Composition and Enrichment of Caprine Milk Oligosaccharides FromDocument8 pagesComposition and Enrichment of Caprine Milk Oligosaccharides FromYans PangerunganNo ratings yet
- The Veterinary Journal: D. Tedesco, L. Garavaglia, M.S. Spagnuolo, E.M. Pferschy-Wenzig, R. Bauer, C. FranzDocument5 pagesThe Veterinary Journal: D. Tedesco, L. Garavaglia, M.S. Spagnuolo, E.M. Pferschy-Wenzig, R. Bauer, C. FranzYans PangerunganNo ratings yet
- Application of Chitosan Microparticles For Treatment of Metritis and in Vivo Evaluation of Broad Spectrum Antimicrobial Activity in Cow UteriDocument10 pagesApplication of Chitosan Microparticles For Treatment of Metritis and in Vivo Evaluation of Broad Spectrum Antimicrobial Activity in Cow UteriYans PangerunganNo ratings yet
- Short Communication Genetic Correlations Between Number of Embryos Produced Using in Vivo and in Vitro Techniques in Heifer and Cow DonorsDocument5 pagesShort Communication Genetic Correlations Between Number of Embryos Produced Using in Vivo and in Vitro Techniques in Heifer and Cow DonorsYans PangerunganNo ratings yet
- Physical Characteristics and Proximate and Mineral Composition OfSaanen Goat Male Kids Meat From Vojvodina (Northern Serbia) Asinfluenced by MuscleDocument9 pagesPhysical Characteristics and Proximate and Mineral Composition OfSaanen Goat Male Kids Meat From Vojvodina (Northern Serbia) Asinfluenced by MuscleYans PangerunganNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Proteccion Contra Sobretensiones PDFDocument84 pagesProteccion Contra Sobretensiones PDFgilbertomjcNo ratings yet
- 1603 Physics Paper With Ans Sol EveningDocument8 pages1603 Physics Paper With Ans Sol EveningRahul RaiNo ratings yet
- Thermal Physics - Rod in CylinderDocument5 pagesThermal Physics - Rod in CylinderLUIS HUMBERTO MARTINEZ PALMETHNo ratings yet
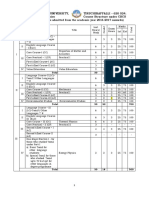
- Bharathidasan University, Tiruchirappalli - 620 024. B.Sc. Physics Course Structure Under CBCSDocument27 pagesBharathidasan University, Tiruchirappalli - 620 024. B.Sc. Physics Course Structure Under CBCSSarjithNo ratings yet
- Topic 1: Simple Stress: Mechanics of Deformable BodiesDocument26 pagesTopic 1: Simple Stress: Mechanics of Deformable BodiesLavenzel YbanezNo ratings yet
- Design Calculation of Abutment StructureDocument39 pagesDesign Calculation of Abutment StructureMukesh JangidNo ratings yet
- Chem 542 Spring2010 Lecture 3 PDFDocument45 pagesChem 542 Spring2010 Lecture 3 PDFwuachinnNo ratings yet
- Trashrack DesignDocument12 pagesTrashrack DesignAnonymous b9DIaPTq6BNo ratings yet
- Physics Department Spring 2014 Textbook ListDocument4 pagesPhysics Department Spring 2014 Textbook Listapcc1No ratings yet
- The Normalized Fundamental Matrix for ODE SystemsDocument4 pagesThe Normalized Fundamental Matrix for ODE SystemsPCTudorNo ratings yet
- Sample Problems Free FallDocument3 pagesSample Problems Free FallguevarrajessphilipNo ratings yet
- MV Cables Data Sheet - SampleDocument5 pagesMV Cables Data Sheet - SampleAvoor KhanNo ratings yet
- Forces and Momentum: Relating Impulse and Momentum to Collision of ObjectsDocument6 pagesForces and Momentum: Relating Impulse and Momentum to Collision of ObjectstolisNo ratings yet
- MOTOR BASES FOR INDUSTRIAL APPLICATIONSDocument8 pagesMOTOR BASES FOR INDUSTRIAL APPLICATIONSbogdanalaciNo ratings yet
- PDFDocument629 pagesPDFSandra EcheverriNo ratings yet
- AQA Physics Students Book AnswersDocument3 pagesAQA Physics Students Book AnswersT-Forty ArrowNo ratings yet
- Simulator List For IB PhysicsDocument7 pagesSimulator List For IB PhysicsBhavika ChoudharyNo ratings yet
- ORS SystemDocument4 pagesORS SystemlaxmanNo ratings yet
- B Tech Mechatronic Syllanus Sem I-Vi PDFDocument60 pagesB Tech Mechatronic Syllanus Sem I-Vi PDFprNo ratings yet
- B9 CovariantElectrodynamicsDocument26 pagesB9 CovariantElectrodynamicsPero PericNo ratings yet
- Induced Sheath Voltages in 110 KV Power Cables - Case StudyDocument10 pagesInduced Sheath Voltages in 110 KV Power Cables - Case StudyrajimuruganNo ratings yet
- Assignment-Ray OpticsDocument2 pagesAssignment-Ray OpticstejvanshsandhuNo ratings yet
- 14C ExamDocument9 pages14C ExamDerekNo ratings yet
- Emf Shielding GuidesDocument2 pagesEmf Shielding GuidesSivasankar LoganathanNo ratings yet
- Chapter 3 DynamicsDocument8 pagesChapter 3 DynamicsIzzat FatimaNo ratings yet
- Magnetic Flow MeterDocument3 pagesMagnetic Flow Meterniazakhtar100% (1)
- Q3 - Zero Negative Integral ExponentsDocument13 pagesQ3 - Zero Negative Integral ExponentsatNo ratings yet
- Space Environment Simulation Part 4Document54 pagesSpace Environment Simulation Part 4Lê Văn Thế QuangNo ratings yet
- Fluid Mechanics EssayDocument2 pagesFluid Mechanics EssayKismaury Shamelle Maldonado PegueroNo ratings yet