You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hough TransformDocument3 pagesThe Hough Transformlizhi0007No ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- HistogramDocument5 pagesHistogramlizhi0007No ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Active Contour Without EdgesDocument22 pagesActive Contour Without Edgeslizhi0007No ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Circle Hough TransformDocument5 pagesCircle Hough Transformlizhi0007100% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Basic Structures OpenCVDocument68 pagesBasic Structures OpenCVlizhi0007100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Advanced PID Controller ImplementationDocument13 pagesAdvanced PID Controller Implementationlizhi0007100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
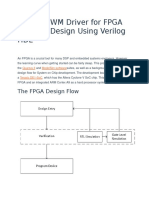
- PWM Driver VerilogDocument24 pagesPWM Driver Veriloglizhi0007No ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Quick Introduction To NeuralDocument10 pagesA Quick Introduction To Neurallizhi0007No ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Svmtrain MDocument10 pagesSvmtrain Mlizhi0007No ratings yet
- Control A DC Motor With An ArduinoDocument5 pagesControl A DC Motor With An Arduinolizhi0007No ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- SVM Tutorial Part2Document20 pagesSVM Tutorial Part2lizhi0007No ratings yet
- How To Install The Latest Eclipse Release in Ubuntu 14Document4 pagesHow To Install The Latest Eclipse Release in Ubuntu 14lizhi0007No ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- SVM Tutorial Part3Document18 pagesSVM Tutorial Part3lizhi0007No ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- SVM Tutorial Part1Document9 pagesSVM Tutorial Part1lizhi0007No ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Closed Loop Speed and Position Control of DC MotorsDocument7 pagesClosed Loop Speed and Position Control of DC Motorslizhi0007No ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- JPEG Image Compression Implemented in Matlab: by Michael ChristensenDocument6 pagesJPEG Image Compression Implemented in Matlab: by Michael ChristensenChandan KumarNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Histogram Calculation - OpenCV 3.0Document7 pagesHistogram Calculation - OpenCV 3.0lizhi0007100% (2)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- Opencv Tutorials 2.4.3Document409 pagesOpencv Tutorials 2.4.3Nindo Harun PrabantaraNo ratings yet
- Histogram Equalization of Grayscale or Color ImageDocument6 pagesHistogram Equalization of Grayscale or Color Imagelizhi0007100% (1)
- Detecting Arrow KeysDocument3 pagesDetecting Arrow Keyslizhi0007No ratings yet
- Simple DFT in OpencvDocument13 pagesSimple DFT in Opencvlizhi0007100% (2)
- Read & Display ImageDocument18 pagesRead & Display Imagelizhi0007100% (1)
- Set real-time clock with DS1307Document14 pagesSet real-time clock with DS1307lizhi0007No ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Writing Task 2 Band 8 - 9Document23 pagesWriting Task 2 Band 8 - 9Emad MerganNo ratings yet
- 4.3 The Non-Inverting AmplifierDocument5 pages4.3 The Non-Inverting Amplifierlizhi0007No ratings yet
- 4.2 The Inverting AmplifierDocument6 pages4.2 The Inverting Amplifierlizhi0007No ratings yet
- 3.3 FET AmplifierDocument5 pages3.3 FET Amplifierlizhi0007100% (1)
- 4.1 Opamps Introduction The Ideal AmplifierDocument2 pages4.1 Opamps Introduction The Ideal Amplifierlizhi0007No ratings yet
- CombinedDocument483 pagesCombinedneegaahNo ratings yet
- Implement Stop and Wait and Sliding Window ProtocolsDocument11 pagesImplement Stop and Wait and Sliding Window ProtocolsSuhas h rNo ratings yet
- Rr10202-Information Tech. and Nume. MethodsDocument8 pagesRr10202-Information Tech. and Nume. MethodsSRINIVASA RAO GANTANo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- 11 Routing AlgorithmsDocument13 pages11 Routing AlgorithmsRahul AryanNo ratings yet
- Image Fusion Using DWT & PCA: International Journal of Advanced Research in Computer Science and Software EngineeringDocument5 pagesImage Fusion Using DWT & PCA: International Journal of Advanced Research in Computer Science and Software EngineeringRudresh RakeshNo ratings yet
- Full PDFDocument157 pagesFull PDFSumit BhanwalaNo ratings yet
- Digital Signal Processing: Course Code: Credit Hours:3 Prerequisite:30107341Document48 pagesDigital Signal Processing: Course Code: Credit Hours:3 Prerequisite:30107341محمد القدوميNo ratings yet
- SKR Engineering College: Department of Computer Science & Engineering Model Question Paper CS 1151 - Data StructuresDocument4 pagesSKR Engineering College: Department of Computer Science & Engineering Model Question Paper CS 1151 - Data StructuresctvenkatNo ratings yet
- Bitcoin Mining Python CodeDocument2 pagesBitcoin Mining Python Codeifyou dontNo ratings yet
- Pretest-FACTORING POLYNOMIALSDocument2 pagesPretest-FACTORING POLYNOMIALSCharlene Grace BronolaNo ratings yet
- C7 MATLAB bvp4c PDFDocument6 pagesC7 MATLAB bvp4c PDFrulbgibNo ratings yet
- DSMA Provides Rapid Adaptation to Price VolatilityDocument4 pagesDSMA Provides Rapid Adaptation to Price VolatilitytrinugrohoNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 26 WekaDocument5 pages26 Wekasandyguru05No ratings yet
- Hashing - How Hash Map Works in Java or How Get Method Works Internally - Java HungryDocument9 pagesHashing - How Hash Map Works in Java or How Get Method Works Internally - Java HungryAshish RaneNo ratings yet
- Math Choice BoardDocument3 pagesMath Choice Boardapi-478947718No ratings yet
- MAC 1105 worksheet sections 3.1-3.4Document3 pagesMAC 1105 worksheet sections 3.1-3.4Marco P. CórdovaNo ratings yet
- Manualv 2Document4 pagesManualv 2Belsty Wale KibretNo ratings yet
- A Directed Genetic Algorithm For Global OptimizationDocument17 pagesA Directed Genetic Algorithm For Global OptimizationParth TrivediNo ratings yet
- 3 Pipelining and Parallel ProcessingDocument34 pages3 Pipelining and Parallel ProcessingRaghunandan KomandurNo ratings yet
- TIN & Surface InterpolationDocument10 pagesTIN & Surface InterpolationHelmi Mukti WijayaNo ratings yet
- DID PrincetonDocument38 pagesDID PrincetoningNo ratings yet
- Balanced MergeDocument2 pagesBalanced MergerafhuoukaNo ratings yet
- Image Classification With Pytorch: Pre-Processing Images To Use in Machine Learning ModelsDocument48 pagesImage Classification With Pytorch: Pre-Processing Images To Use in Machine Learning ModelsRahul ShettyNo ratings yet
- Instrumentasi Elektronika: Pengukuran dan Kontrol dengan Sensor, Aktuator dan Sistem Akuisisi DataDocument29 pagesInstrumentasi Elektronika: Pengukuran dan Kontrol dengan Sensor, Aktuator dan Sistem Akuisisi DatamuridNo ratings yet
- First Come First ServeDocument10 pagesFirst Come First ServeKAVIARASU.DNo ratings yet
- Mid2 SOLUTIONDocument11 pagesMid2 SOLUTIONFarrukh AbbasNo ratings yet
- Verify Nyquist Criteria Using MATLABDocument22 pagesVerify Nyquist Criteria Using MATLABSyeda InaasNo ratings yet
- DSIP Comp IT Viva Questions PDFDocument25 pagesDSIP Comp IT Viva Questions PDFPrithvirajKshatriya-BadgujarNo ratings yet
- DSP Lab Manual For ECE 3 2 R09Document147 pagesDSP Lab Manual For ECE 3 2 R09Jandfor Tansfg Errott100% (2)
- Lecture Module 1 - Introduction NewDocument19 pagesLecture Module 1 - Introduction NewAhmad Sabree Abdul BasitNo ratings yet
- Why We Die: The New Science of Aging and the Quest for ImmortalityFrom EverandWhy We Die: The New Science of Aging and the Quest for ImmortalityRating: 3.5 out of 5 stars3.5/5 (2)
- When the Body Says No by Gabor Maté: Key Takeaways, Summary & AnalysisFrom EverandWhen the Body Says No by Gabor Maté: Key Takeaways, Summary & AnalysisRating: 3.5 out of 5 stars3.5/5 (2)
- Undeniable: How Biology Confirms Our Intuition That Life Is DesignedFrom EverandUndeniable: How Biology Confirms Our Intuition That Life Is DesignedRating: 4 out of 5 stars4/5 (11)
- The Revolutionary Genius of Plants: A New Understanding of Plant Intelligence and BehaviorFrom EverandThe Revolutionary Genius of Plants: A New Understanding of Plant Intelligence and BehaviorRating: 4.5 out of 5 stars4.5/5 (137)
- Crypt: Life, Death and Disease in the Middle Ages and BeyondFrom EverandCrypt: Life, Death and Disease in the Middle Ages and BeyondRating: 4 out of 5 stars4/5 (3)