You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- TL-WR841N j.0 PDFDocument3 pagesTL-WR841N j.0 PDFharsha kopNo ratings yet
- Archer MR400MR200 - UG - REV4.0.1Document96 pagesArcher MR400MR200 - UG - REV4.0.1Zoel-Fazlee OmarNo ratings yet
- PKA-RP2.5FAL Pka-Rp3Fal Pka-Rp4Fal: Technical & Service ManualDocument56 pagesPKA-RP2.5FAL Pka-Rp3Fal Pka-Rp4Fal: Technical & Service ManualMihaela CaciumarciucNo ratings yet
- Nf-Combi 3664 Mechanic: Customer Support White Goods Interior PartsDocument8 pagesNf-Combi 3664 Mechanic: Customer Support White Goods Interior PartsMihaela CaciumarciucNo ratings yet
- Refrigerator: Service ManualDocument119 pagesRefrigerator: Service ManualMihaela CaciumarciucNo ratings yet
- L-81 Whirlpool Cabrio WasherDocument84 pagesL-81 Whirlpool Cabrio WasherJose Lorenzo Beltran Real100% (1)
- Technical Service Guide: Arctica Side-by-Side Dual Evaporator Refrigerators With Electronic Touch ControlsDocument62 pagesTechnical Service Guide: Arctica Side-by-Side Dual Evaporator Refrigerators With Electronic Touch ControlsMihaela CaciumarciucNo ratings yet
- Service Manual: Split TypeDocument135 pagesService Manual: Split TypeMihaela CaciumarciucNo ratings yet
- BN44 00428bDocument73 pagesBN44 00428bClaudio Hector Arrosa100% (1)
- DAEWOO RefrigeradorDocument83 pagesDAEWOO RefrigeradorMihaela Caciumarciuc100% (2)
- Test Program: Brandt Customer ServicesDocument5 pagesTest Program: Brandt Customer ServicesMihaela CaciumarciucNo ratings yet
- Køleskab FSC 20 Xe: PV Import A/S Gårsdalsvej 20 8800 ViborgDocument5 pagesKøleskab FSC 20 Xe: PV Import A/S Gårsdalsvej 20 8800 ViborgMihaela CaciumarciucNo ratings yet
- Manual de Servicio: Lavarropas Automatico Carga Superior AWB110 PH PhilipsDocument9 pagesManual de Servicio: Lavarropas Automatico Carga Superior AWB110 PH PhilipsMihaela CaciumarciucNo ratings yet
- Service Manual: Split TypeDocument135 pagesService Manual: Split TypeMihaela CaciumarciucNo ratings yet
- Køleskab 1Fsc 19 Xel: PV Import A/S Gårsdalsvej 20 8800 ViborgDocument4 pagesKøleskab 1Fsc 19 Xel: PV Import A/S Gårsdalsvej 20 8800 ViborgMihaela CaciumarciucNo ratings yet
- Exploded - View - Parts - List (Map) (1) CT - 336708Document12 pagesExploded - View - Parts - List (Map) (1) CT - 336708Mihaela CaciumarciucNo ratings yet
- Acs102 6t PDFDocument11 pagesAcs102 6t PDFClaudelino Toffoletti EstecheNo ratings yet
- LG 42LE5500 LCDDocument40 pagesLG 42LE5500 LCDundiablo100% (1)
- Sony kdl-26v4500 kdl-32v4500 kdl-37v4500 Chassis Eg1l SM PDFDocument58 pagesSony kdl-26v4500 kdl-32v4500 kdl-37v4500 Chassis Eg1l SM PDFMihaela CaciumarciucNo ratings yet
- LG 55le7300 PDFDocument44 pagesLG 55le7300 PDFMihaela CaciumarciucNo ratings yet
- LG L226WTQ B WFS - e PDFDocument29 pagesLG L226WTQ B WFS - e PDFMihaela CaciumarciucNo ratings yet
- Samsung Bn96 03775a Rev1.2inverterDocument2 pagesSamsung Bn96 03775a Rev1.2invertertrinetserviceNo ratings yet
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Samsung UE 26-58 EH-ES 26-58 Shasis U78a U78bDocument163 pagesSamsung UE 26-58 EH-ES 26-58 Shasis U78a U78bMihaela CaciumarciucNo ratings yet
- TO80S, TO81W, TO82B TO90S, TO91W, TO92B: OvensDocument13 pagesTO80S, TO81W, TO82B TO90S, TO91W, TO92B: OvensMihaela CaciumarciucNo ratings yet
- FJ SM Asy9 12 LSBCW PDFDocument16 pagesFJ SM Asy9 12 LSBCW PDFMihaela CaciumarciucNo ratings yet
- LG TV Service Manual 42lb5800 PDFDocument78 pagesLG TV Service Manual 42lb5800 PDFJunior Gutierrez Gallegos0% (1)
- FRS2211IALDocument78 pagesFRS2211IALMihaela CaciumarciucNo ratings yet
- Block DiagramDocument4 pagesBlock DiagramMihaela CaciumarciucNo ratings yet
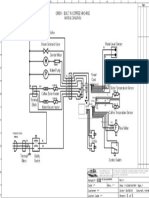
- Cm01x Coffee Machine Wiring DiagramDocument1 pageCm01x Coffee Machine Wiring DiagramMihaela Caciumarciuc100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Sec04 - Electrical Design DrawingsDocument18 pagesSec04 - Electrical Design DrawingsYusufNo ratings yet
- RS-USB2 USER MANUEL - Rev01Document4 pagesRS-USB2 USER MANUEL - Rev01yusufozerNo ratings yet
- MQ Series For AS400Document84 pagesMQ Series For AS400Ramana VaralaNo ratings yet
- Docu8299 RecoverPoint Deploying With AIX Hosts Technical NotesDocument28 pagesDocu8299 RecoverPoint Deploying With AIX Hosts Technical Notesw00kkkNo ratings yet
- PandID Standard 1Document10 pagesPandID Standard 1Grazel MDNo ratings yet
- Overall Solutions and Typical Application For Substation AutomationDocument7 pagesOverall Solutions and Typical Application For Substation AutomationWilson MondoNo ratings yet
- PCI Express System Architecture - PDF - MindShareDocument222 pagesPCI Express System Architecture - PDF - MindSharesolf jacobNo ratings yet
- Tms 320 F 2811Document172 pagesTms 320 F 2811vinaykumaarNo ratings yet
- 1G DVD File StructureDocument8 pages1G DVD File StructureKarthikeya SriNo ratings yet
- 1 Foreword: Laserworld Laser Engraving Machine ManualDocument55 pages1 Foreword: Laserworld Laser Engraving Machine ManualstrimerNo ratings yet
- X-USB Firmware Update V10 2014-07-09 Rev.2 PDFDocument2 pagesX-USB Firmware Update V10 2014-07-09 Rev.2 PDFDaniel gomez molinaNo ratings yet
- Os Super-Imp-Tie-22 (1) PDFDocument4 pagesOs Super-Imp-Tie-22 (1) PDFChandana H.RNo ratings yet
- Networking PowerpointDocument38 pagesNetworking Powerpointwoldemariam worku100% (1)
- Squid Proxy Configuration GuideDocument28 pagesSquid Proxy Configuration GuideEdmund OchiengNo ratings yet
- Gps GSMDocument6 pagesGps GSMVishal ThakurNo ratings yet
- Operators Question 1Document21 pagesOperators Question 1rahul rastogiNo ratings yet
- Unknown Windows Autostart MethodsDocument4 pagesUnknown Windows Autostart Methodsblah3422No ratings yet
- SoundcasterDocument3 pagesSoundcasterhhyj0% (1)
- Sticky Notes 1Document13 pagesSticky Notes 1Cristian Sergiu GeorgescuNo ratings yet
- 900 400 - SM - V2.1.0 - 11747 S0 20160601 en PDFDocument123 pages900 400 - SM - V2.1.0 - 11747 S0 20160601 en PDFIsai Lara Osoria100% (3)
- Altronic Digital Pressure GaugeDocument2 pagesAltronic Digital Pressure GaugekaviarasuNo ratings yet
- Topic: Touch Switch MechatronicsDocument6 pagesTopic: Touch Switch MechatronicsShriprasad ChorgheNo ratings yet
- International Reactor Corporation: Standard and Custom ReactorsDocument8 pagesInternational Reactor Corporation: Standard and Custom Reactorskumar_chemicalNo ratings yet
- 140u sg004 - en eDocument44 pages140u sg004 - en eGomz RubNo ratings yet
- PWM Motor ControllerDocument44 pagesPWM Motor ControllerTrương Tuấn VũNo ratings yet
- 13 GDocument12 pages13 GAhmad SardoukNo ratings yet
- DLA001Document36 pagesDLA001Rogerio GuimarãesNo ratings yet
- Electronic BallastDocument10 pagesElectronic BallastAnonymous xX7na2JNo ratings yet
- Solo Control MDocument88 pagesSolo Control MlNo ratings yet
- Toshiba SSA-340A Ultrasound - Diagnostic Function ManualDocument160 pagesToshiba SSA-340A Ultrasound - Diagnostic Function Manualperla_canto_1100% (4)