You might also like
- Report Draft - Lab. 1Document18 pagesReport Draft - Lab. 1Cristian MedinaNo ratings yet
- SeguridadDocument4 pagesSeguridadCristian MedinaNo ratings yet
- 1 Sesión Inicial IDE Modelo Canvas JESPINOZA 2017-2Document13 pages1 Sesión Inicial IDE Modelo Canvas JESPINOZA 2017-2Cristian MedinaNo ratings yet
- Reporte de Inflacion Junio 2017Document111 pagesReporte de Inflacion Junio 2017Wendy FernándezNo ratings yet
- Avance 1 de Intro - PasaelpackDocument2 pagesAvance 1 de Intro - PasaelpackCristian MedinaNo ratings yet
- Semana 1 - 1aDocument40 pagesSemana 1 - 1aCristian MedinaNo ratings yet
- Laboratorio de Química Orgánica - Lab - 3Document8 pagesLaboratorio de Química Orgánica - Lab - 3Cristian MedinaNo ratings yet
- Balanceo Redox en Compuestos Orgánicos UNAMDocument23 pagesBalanceo Redox en Compuestos Orgánicos UNAMjaclavijop100% (1)
- Laboratorio 6 BBDocument4 pagesLaboratorio 6 BBCristian MedinaNo ratings yet
- FQ 2016-2 Clase 11Document34 pagesFQ 2016-2 Clase 11Cristian MedinaNo ratings yet
- Discriminacion Linguistica en Lima - PerúDocument13 pagesDiscriminacion Linguistica en Lima - PerúCristian Medina100% (1)
- Formato de Planeacion 2020-B HM I MixtoDocument11 pagesFormato de Planeacion 2020-B HM I MixtovalledechNo ratings yet
- Capitulo 1 - Algunos Tópicos de Seguridad en Redes PDFDocument8 pagesCapitulo 1 - Algunos Tópicos de Seguridad en Redes PDFMARIANo ratings yet
- Leccion 2Document4 pagesLeccion 2Cristian HernandezNo ratings yet
- Reseña de Los Negocios en La Era Digital - Bill GatesDocument9 pagesReseña de Los Negocios en La Era Digital - Bill GatesKevin GomezNo ratings yet
- DisenoDoctorado Ciencias Administrativas NUCLEO BOLIVARDocument107 pagesDisenoDoctorado Ciencias Administrativas NUCLEO BOLIVARdivina molinaNo ratings yet
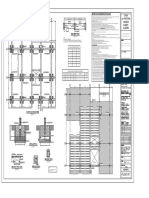
- Plano de FundacionesDocument1 pagePlano de FundacionesSergio Dominguez100% (1)
- Dokumen - Tips - Tarea 3 EnsambladorDocument3 pagesDokumen - Tips - Tarea 3 EnsambladorRonald Carlos HVNo ratings yet
- Memoria de Calculo Cimentacion-De PosteDocument3 pagesMemoria de Calculo Cimentacion-De PosteJean IbalaNo ratings yet
- Hoja Vida Oscarsanchez - IngocivilDocument12 pagesHoja Vida Oscarsanchez - IngocivilOscar Sanchez VelasquezNo ratings yet
- Aspectos Teoricos Energia Eolica - Sistemas ElectromecánicosDocument25 pagesAspectos Teoricos Energia Eolica - Sistemas ElectromecánicosMarioyfernanda Guerra MuruaNo ratings yet
- Fotografia Forense - TrabajoDocument17 pagesFotografia Forense - TrabajoOlinda Ortiz ZuasnabarNo ratings yet
- 1660 e 4Document104 pages1660 e 4erickNo ratings yet
- Como Eliminar El Virus MUGEN Vbs de Una Memoria USB y de La PCDocument8 pagesComo Eliminar El Virus MUGEN Vbs de Una Memoria USB y de La PCCharly HousesNo ratings yet
- Tarea V. Presentación en PPDocument14 pagesTarea V. Presentación en PPGregory Enmanuel Almanzar DuarteNo ratings yet
- Monografia DeyvidDocument33 pagesMonografia Deyvidroger rafaelNo ratings yet
- Gestión información vehículos taller mecánicoDocument13 pagesGestión información vehículos taller mecánicojonatha quesadaNo ratings yet
- Aporte 2 DemodulacionAngularDocument2 pagesAporte 2 DemodulacionAngularMarlon José Turizo MedinaNo ratings yet
- Administracion de La Arquitectura TecnologicaDocument4 pagesAdministracion de La Arquitectura TecnologicaRaquel GutierrezNo ratings yet
- Evidencia 2 Cuadros Comparativos TrazabilidadDocument20 pagesEvidencia 2 Cuadros Comparativos TrazabilidadTierradentro Antonio25% (4)
- InformeFinal Cajas EduardoDocument9 pagesInformeFinal Cajas EduardoEDUARDO RUBEN CAJAS CALVOPIÑANo ratings yet
- Secuencia Didáctica Robotica (Sala 5 Años)Document5 pagesSecuencia Didáctica Robotica (Sala 5 Años)Nadia Gisondi86% (7)
- Asignatura Aseguramiento de La Calidad Eje 1Document4 pagesAsignatura Aseguramiento de La Calidad Eje 1Ines WardNo ratings yet
- Los Recursos Naturales de Bolivia Con Énfasis en Vida Silvestre (Fauna)Document24 pagesLos Recursos Naturales de Bolivia Con Énfasis en Vida Silvestre (Fauna)Herbert Rodriguez Marquez100% (1)
- El Estado Moribundo Del Currículum.Document12 pagesEl Estado Moribundo Del Currículum.Fabian Di Stefano0% (1)
- AUTOCADDocument20 pagesAUTOCADMarlon YunganNo ratings yet
- La INTERNET y La Masificación Del ConocimientoDocument3 pagesLa INTERNET y La Masificación Del Conocimientoenergia21No ratings yet
- Pa Aocc - Fundamentos de Obras de Infraestructuras - Iib Noche - Marco BrummertDocument8 pagesPa Aocc - Fundamentos de Obras de Infraestructuras - Iib Noche - Marco Brummertkatty niño llacsahuangaNo ratings yet
- Workshop Design ThinkingDocument3 pagesWorkshop Design ThinkingJuan Martin GomezNo ratings yet
- MatrizRIESGOSDocument45 pagesMatrizRIESGOSReynel Gomez MuñozNo ratings yet
- Check List Equipos MenoresDocument1 pageCheck List Equipos MenoresMarcos Armando Vasquez ChavezNo ratings yet