You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Trumpet Studio Course Packet PDFDocument50 pagesTrumpet Studio Course Packet PDFAnonymous Zvl4mzF100% (5)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Prex SongsDocument4 pagesPrex SongsAriane AndayaNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Canon - Kotaro Oshio TabsDocument4 pagesCanon - Kotaro Oshio TabsHyeongikJo100% (1)
- Steve Vai-Paganini 5th Caprice (Crossroads)Document3 pagesSteve Vai-Paganini 5th Caprice (Crossroads)pdrharigmailcomNo ratings yet
- Music Video AnalysisDocument9 pagesMusic Video AnalysisRachel WoolnerNo ratings yet
- Camarin High School First Quarterly Examination - Mapeh 8: National Capital Region Division of Caloocan CityDocument3 pagesCamarin High School First Quarterly Examination - Mapeh 8: National Capital Region Division of Caloocan CityReynaldo Rolan Jr.No ratings yet
- An Introduction To Pythagorean ArithmeticDocument78 pagesAn Introduction To Pythagorean ArithmeticIxtanaNo ratings yet
- Mary Johnston, Exits and Entrances in Roman Comedy (Plautus and Terence)Document161 pagesMary Johnston, Exits and Entrances in Roman Comedy (Plautus and Terence)schediasmataNo ratings yet
- Chapter 6 Conclusion and SuggestionsDocument3 pagesChapter 6 Conclusion and SuggestionsZul Hairey100% (2)
- Chapter 4 Poject Analysis and FindingsDocument23 pagesChapter 4 Poject Analysis and FindingsZul HaireyNo ratings yet
- Chapter 3 MethodologyDocument6 pagesChapter 3 MethodologyZul HaireyNo ratings yet
- Chapter 2 Liturature ReviewDocument14 pagesChapter 2 Liturature ReviewZul Hairey100% (1)
- Control UnitDocument47 pagesControl UnitZul HaireyNo ratings yet
- E5144 UNIT 2 Comp Processing ProblemsDocument8 pagesE5144 UNIT 2 Comp Processing ProblemsZul HaireyNo ratings yet
- E5144 UNIT 3 IO ProcessDocument4 pagesE5144 UNIT 3 IO ProcessZul HaireyNo ratings yet
- E5144 UNIT 1 Introduction To Computer Control SystemDocument20 pagesE5144 UNIT 1 Introduction To Computer Control SystemZul HaireyNo ratings yet
- ISI KANDUNGAN BAB Isi Kandungan Penghargaan PrakataDocument3 pagesISI KANDUNGAN BAB Isi Kandungan Penghargaan PrakataZul HaireyNo ratings yet
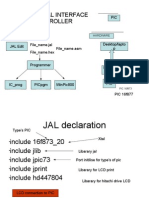
- Modul E4160 Unit 8 Peripheral Interface ControllerDocument30 pagesModul E4160 Unit 8 Peripheral Interface ControllerRAJA ARIF SHAH BIN RAJA OSMAN100% (1)
- The Chrysanthemum and The Sword (Mad Men)Document2 pagesThe Chrysanthemum and The Sword (Mad Men)Ece AlptunaerNo ratings yet
- Tax Adv GorakhpurDocument48 pagesTax Adv Gorakhpurashish guptaNo ratings yet
- Motorola TLKR T80 Extreme Walkie Talkie Specification SheetDocument2 pagesMotorola TLKR T80 Extreme Walkie Talkie Specification SheetMeor AmriNo ratings yet
- GSM Frequency Band 2GDocument8 pagesGSM Frequency Band 2Garatia5576No ratings yet
- Network Convergence and Types of Network ConvergenceDocument2 pagesNetwork Convergence and Types of Network Convergencedivi25879100% (1)
- Annual Report of Activities of Student Bodies For Year 2018-19Document55 pagesAnnual Report of Activities of Student Bodies For Year 2018-19Ankit GuptaNo ratings yet
- Teaching GeishaDocument17 pagesTeaching GeishaMaria PaulaNo ratings yet
- Nivel 2-Unit 1Document9 pagesNivel 2-Unit 1stefaniNo ratings yet
- Indian Classical Dance - WikipediaDocument6 pagesIndian Classical Dance - Wikipediaashish jhaNo ratings yet
- IEEEDocument15 pagesIEEEJose Luis Barreto BaptistaNo ratings yet
- LRX 2102R ++ GBDocument5 pagesLRX 2102R ++ GBbrunozoNo ratings yet
- Design A Single-Stub Tuner To Match A Load ImpedanceDocument3 pagesDesign A Single-Stub Tuner To Match A Load ImpedanceMuhammad AhmedNo ratings yet
- CS-23 Aircraft GPS Upgrade Installation GuideDocument36 pagesCS-23 Aircraft GPS Upgrade Installation GuidePhilNo ratings yet
- Jasmine Johnson Resume1Document3 pagesJasmine Johnson Resume1api-357417433No ratings yet
- General Description of Dynamic Channel Configuration Control - DCCC - AlgorithmDocument10 pagesGeneral Description of Dynamic Channel Configuration Control - DCCC - Algorithmdiefenbaker13No ratings yet
- Studio ScriptDocument3 pagesStudio Scriptapi-423589311No ratings yet
- Bostin ChristopherDocument1 pageBostin Christopherapi-15557658No ratings yet
- Why I Believe in The Supernatural: by - Suyash Agrawal (One Year Diploma, Spring 2017)Document1 pageWhy I Believe in The Supernatural: by - Suyash Agrawal (One Year Diploma, Spring 2017)Suyash AgrawalNo ratings yet
- LifeSize Express 220 Datasheet enDocument2 pagesLifeSize Express 220 Datasheet enjosvan69No ratings yet
- You will hear people talking in eight different situations. For questions 1-8, choose the best answer (A, В or C)Document4 pagesYou will hear people talking in eight different situations. For questions 1-8, choose the best answer (A, В or C)Ngọc Phạm0% (1)
- Ratigs 16,17 y 18 Octubre 2009 Valle de MexicoDocument3 pagesRatigs 16,17 y 18 Octubre 2009 Valle de MexicotvespectaculosNo ratings yet
- Woodfield KeyboardRecitalOriental 1990Document31 pagesWoodfield KeyboardRecitalOriental 1990jajsNo ratings yet