Professional Documents
Culture Documents
Et Ug Faults
Uploaded by
Nitish KumarCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Et Ug Faults
Uploaded by
Nitish KumarCopyright:
Available Formats
Encounter Test: Guide 4: Faults
Product Version 15.12
October 2015
20032015 Cadence Design Systems, Inc. All rights reserved.
Portions IBM Corporation, the Trustees of Indiana University, University of Notre Dame, the Ohio State
University, Larry Wall. Used by permission.
Printed in the United States of America.
Cadence Design Systems, Inc. (Cadence), 2655 Seely Ave., San Jose, CA 95134, USA.
Product Encounter Test and Diagnostics contains technology licensed from, and copyrighted by:
1. IBM Corporation, and is 1994-2002, IBM Corporation. All rights reserved. IBM is a Trademark of
International Business Machine Corporation;.
2. The Trustees of Indiana University and is 2001-2002, the Trustees of Indiana University. All rights
reserved.
3. The University of Notre Dame and is 1998-2001, the University of Notre Dame. All rights reserved.
4. The Ohio State University and is 1994-1998, the Ohio State University. All rights reserved.
5. Perl Copyright 1987-2002, Larry Wall
Associated third party license terms for this product version may be found in the README.txt file at
downloads.cadence.com.
Open SystemC, Open SystemC Initiative, OSCI, SystemC, and SystemC Initiative are trademarks or
registered trademarks of Open SystemC Initiative, Inc. in the United States and other countries and are
used with permission.
Trademarks: Trademarks and service marks of Cadence Design Systems, Inc. contained in this document
are attributed to Cadence with the appropriate symbol. For queries regarding Cadences trademarks,
contact the corporate legal department at the address shown above or call 800.862.4522. All other
trademarks are the property of their respective holders.
Restricted Permission: This publication is protected by copyright law and international treaties and
contains trade secrets and proprietary information owned by Cadence. Unauthorized reproduction or
distribution of this publication, or any portion of it, may result in civil and criminal penalties. Except as
specified in this permission statement, this publication may not be copied, reproduced, modified, published,
uploaded, posted, transmitted, or distributed in any way, without prior written permission from Cadence.
Unless otherwise agreed to by Cadence in writing, this statement grants Cadence customers permission to
print one (1) hard copy of this publication subject to the following conditions:
1. The publication may be used only in accordance with a written agreement between Cadence and its
customer.
2. The publication may not be modified in any way.
3. Any authorized copy of the publication or portion thereof must include all original copyright,
trademark, and other proprietary notices and this permission statement.
4. The information contained in this document cannot be used in the development of like products or
software, whether for internal or external use, and shall not be used for the benefit of any other party,
whether or not for consideration.
Disclaimer: Information in this publication is subject to change without notice and does not represent a
commitment on the part of Cadence. Except as may be explicitly set forth in such agreement, Cadence does
not make, and expressly disclaims, any representations or warranties as to the completeness, accuracy or
usefulness of the information contained in this document. Cadence does not warrant that use of such
information will not infringe any third party rights, nor does Cadence assume any liability for damages or
costs of any kind that may result from use of such information.
Restricted Rights: Use, duplication, or disclosure by the Government is subject to restrictions as set forth
in FAR52.227-14 and DFAR252.227-7013 et seq. or its successor
Encounter Test: Guide 4: Faults
Contents
List of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Preface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
About Encounter Test and Diagnostics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Typographic and Syntax Conventions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Encounter Test Documentation Roadmap . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Getting Help for Encounter Test and Diagnostics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Contacting Customer Service . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Encounter Test And Diagnostics Licenses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Using Encounter Test Contrib Scripts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
What We Changed for This Edition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1
Building Fault Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Build Fault Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Build Fault Model Input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Build Fault Model Output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Build Fault Model Examples for Including/Excluding Faults . . . . . . . . . . . . . . . . . . . . 17
Build Fault Model Examples for Cell Boundary Fault Model . . . . . . . . . . . . . . . . . . . . 18
Build Fault Model Examples with Fault Rule Files . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Build Fault Model Examples with Special Handling of Ignored Faults . . . . . . . . . . . . 21
Build Fault Model Example for Hierarchical Test - Chip Level . . . . . . . . . . . . . . . . . . 22
Build Alternate Fault Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Prepare Path Delay Faults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Prepare Path Delay Inputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Prepare Path Delay Outputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Build Package Test Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Build Package Test Objectives Input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Build Package Test Objectives Output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Build Bridge Fault Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
October 2015 3 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Build Bridge Fault Model Input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Build Bridge Fault Model Output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Build Bridge Fault Model Scenarios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2
Modifying Fault Model/Fault Status . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Using Model Attributes to Add/Remove Faults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Fault Attribute Specification in Verilog Design Source . . . . . . . . . . . . . . . . . . . . . . . . 33
Fault Attribute Specification in Edit Model File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Using Fault Rule Specification to Add/Remove Faults . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Preparing a Fault Subset ................................................ 36
Using Fault Subset for ATPG / Fault Simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Removing Scan Faults from Consideration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Preparing an Ignore Faults File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Preparing Detected Faults File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Prepare Core Migration Faults (Hierarchical Test - Core Level) . . . . . . . . . . . . . . . . . . . . 43
3
Reporting Faults, Test Objectives, and Statistics . . . . . . . . . . . . . 45
Report Faults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Reporting Low Power Faults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Reporting Bridge Faults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Report Fault Coverage Statistics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Options for Hierarchical Fault Statistics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Reporting Low Power Fault Statistics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Reporting Bridge Fault Statistics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Report Domain Faults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Report Domain Fault Coverage Statistics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Report Path Faults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Report Path Fault Coverage Statistics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Report Package Test Objectives (Stuck Driver and Shorted Nets) . . . . . . . . . . . . . . . . . 66
Report Package Test Objectives Coverage Statistics . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
October 2015 4 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
4
Analyzing Faults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Fault Analysis Process . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Analyze Deterministic Faults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Input Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Outputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
Sample Methodology for Large Parts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Analyze Faults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Restrictions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Input Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Analyzing TFA Messages from Create Logic Tests or Analyze Faults . . . . . . . . . . . . . . . 75
GUI Schematic Fault Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
Deterministic Testability Measurements for Sequential Test . . . . . . . . . . . . . . . . . . . . . . 76
Performing Deterministic Testability Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Input Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Possible Value Set (PVS) Concepts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Deterministic Controllability/Observability (CO) Measure Concepts . . . . . . . . . . . . . 78
Sequential Depth Measure Concepts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Latch Tracing Analysis Concepts ....................................... 79
Random Resistant Fault Analysis (RRFA) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Analyze Random Resistance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Test Points . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
.................................................................. 88
5
Deleting Fault Model Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Delete Fault Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Delete Fault Status for All Existing Test Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Delete Committed Fault Status for a Test Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Delete Alternate Fault Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Delete Package Test Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Delete Fault Model Analysis Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
October 2015 5 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
6
Concepts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Fault Types . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Static (Stuck-at) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Dynamic (Transition) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Parametric (Driver/Receiver) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
IDDq . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
Bridge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Fault Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Ignored Faults (I, Iu, Ib, It) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Collapsed (C) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Pre-Collapsed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Grouping (&, I) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Possibly testable at best faults (PTAB) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Active and Inactive (i) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
Fault Test Status . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
Tested (T) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
Possibly Tested (P) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
Aborted (A) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
Redundant (R) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
Untested Not Processed (u) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
Untestable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
Fault/Test Coverage Calculations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
Fault Modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
Pin Faults and Pattern Faults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
Cross-Mode Markoff (MARKOFF) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
Other Test Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
Path Delay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
Package Test Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
A
Pattern Faults and Fault Rules . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Fault Rule File Syntax . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Fault Rule File Element Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
October 2015 6 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
How to Code a Fault Rule File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
Composite Fault Support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
Creating Bridge Fault Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
Specifying Bridge Faults in a Fault Rule File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
Creating Shorted Net Fault Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
Specifying a Shorted Net Fault in a Fault Rule File . . . . . . . . . . . . . . . . . . . . . . . . . 140
B
Hierarchical Fault Processing Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
Core Level Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
SOC Level Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
C
Building Register Array and Random Resistant Fault List Files
for Pattern Compaction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
Input Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
Output Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
Index. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
October 2015 7 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
October 2015 8 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
List of Figures
Figure 1-1 Fault Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Figure 1-2 Fault Model Compatibility with Other Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Figure 2-1 Fault Attributes in Verilog . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Figure 3-1 Fault Status Key - available through msgHelp TFM-705 or optionally included in
log (reportkey=yes). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Figure 3-2 Fault Type key - available through msgHelp TFM-705 or optionally included in log
(reportkey=yes). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Figure 3-3 Representation of Faults 40 and 41 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Figure 3-4 Representation of Faults 43 and 65 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Figure 3-5 Report Bridge Fault Output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Figure 3-6 Bridge Fault Statistics Report. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Figure 4-1 Simple AND Block for Fault Analyzer Example . . . . . . . . . . . . . . . . . . . . . . . . 69
Figure 4-2 An Observe Test Point . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Figure 4-3 Control-1 Test Point . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Figure 4-4 Test Point Insertion Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Figure 6-1 S-A-1 AND gate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Figure 6-2 XOR Static Pattern Faults Automatically Generated by Encounter Test . . . . . 95
Figure 6-3 TSD Static Pattern Faults Automatically Generated by Encounter Test . . . . . . 95
Figure 6-4 Latch Static Pattern Faults Automatically Generated by Encounter Test . . . . . 96
Figure 6-5 Status Faults for MUX2 Primitive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
Figure 6-6 XOR Dynamic Pattern Faults Automatically Generated by Encounter Test . . . 99
Figure 6-7 TSD Dynamic Pattern Faults Automatically Generated by Encounter Test . . 100
Figure 6-8 Latch Dynamic Pattern Faults Automatically Generated by Encounter Test . 101
Figure 6-9 Test Coverage Formulas Used By Encounter Test. . . . . . . . . . . . . . . . . . . . . 114
Figure 6-10 Test Coverage Formulas with Ignore Faults . . . . . . . . . . . . . . . . . . . . . . . . . 115
Figure 6-11 Path Delay Fault Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
Figure A-1 Fault Rule File Syntax . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Figure A-2 Example of NET Statement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
October 2015 9 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Figure A-3 Dependent Composite Fault . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
Figure B-1 Core Level Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
Figure B-2 SOC Level Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
October 2015 10 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Preface
About Encounter Test and Diagnostics
Encounter Test uses breakthrough timing-aware and power -aware technologies to enable
customers to manufacture higher-quality power-efficient silicon, faster and at lower cost.
Encounter Diagnostics identifies critical yield-limiting issues and locates their root causes to
speed yield ramp.
Encounter Test is integrated with Encounter RTL Compiler global synthesis and inserts a
complete test infrastructure to assure high testability while reducing the cost-of-test with on-
chip test data compression.
Encounter Test also supports manufacturing test of low-power devices by using power intent
information to automatically create distinct test modes for power domains and shut-off
requirements. It also inserts design-for-test (DFT) structures to enable control of power shut-
off during test. The power-aware ATPG engine targets low-power structures, such as level
shifters and isolation cells, and generates low-power scan vectors that significantly reduce
power consumption during test. Cumulatively, these capabilities minimize power consumption
during test while still delivering the high quality of test for low-power devices.
Encounter Test uses XOR-based compression architecture to allow a mixed-vendor flow,
giving flexibility and options to control test costs. It works with all popular design libraries and
automatic test equipment (ATE).
Typographic and Syntax Conventions
The Encounter Test library set uses the following typographic and syntax conventions.
Text that you type, such as commands, filenames, and dialog values, appears in Courier
type.
Example: Type build_model -h to display help for the command.
Variables appear in Courier italic type.
Example: Use TB_SPACE_SCRIPT=input_filename to specify the name of the
script that determines where Encounter Test binary files are stored.
Optional arguments are enclosed in brackets.
October 2015 11 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Preface
Example: [simulation=gp|hsscan]
User interface elements, such as field names, button names, menus, menu commands,
and items in clickable list boxes, appear in Helvetica italic type.
Example: Select File - Delete - Model and fill in the information about the model.
Encounter Test Documentation Roadmap
The following figure depicts a recommended flow for traversing the documentation structure.
Getting
Started Overview and
New User
Quickstart
Models
Testmodes
Guides
Test Structures
Faults
ATPG
Test Vectors
Diagnostics
Flow PMBIST Pattern
PMBIST Analysis ET Flows Generation
Commands GUI Expert
Reference Messages Test Pattern Formats
Documents
Extension Language Glossary
October 2015 12 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Preface
Getting Help for Encounter Test and Diagnostics
Use the following methods to obtain help information:
1. From the <installation_dir>/tools/bin directory, type cdnshelp at the command
prompt.
2. To view a book, double-click the desired product book collection and double-click the
desired book title in the lower pane to open the book.
Click the Help or ? buttons on Encounter Test forms to navigate to help for the form and its
related topics.
Refer to the following in the Encounter Test: Reference: GUI for additional details:
Help Pull-down describes the Help selections for the Encounter Test main window.
View Schematic Help Pull-down describes the Help selections for the Encounter Test
View Schematic window.
Contacting Customer Service
Use the following methods to get help for your Cadence product.
Cadence Online Customer Support
Cadence online customer support offers answers to your most common technical
questions. It lets you search more than 40,000 FAQs, notifications, software updates,
and technical solutions documents that give step-by-step instructions on how to solve
known problems. It also gives you product-specific e-mail notifications, software updates,
service request tracking, up-to-date release information, full site search capabilities,
software update ordering, and much more.
Go to http://www.cadence.com/support/pages/default.aspx for more information on
Cadence Online Customer Support.
Cadence Customer Response Center (CRC)
A qualified Applications Engineer is ready to answer all of your technical questions on
the use of this product through the Cadence Customer Response Center (CRC). Contact
the CRC through Cadence Online Support. Go to http://support.cadence.com and click
the Contact Customer Support link to view contact information for your region.
IBM Field Design Center Customers
October 2015 13 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Preface
Contact IBM EDA Customer Services at 1-802-769-6753, FAX 1-802-769-7226. From
outside the United States call 001-1-802-769-6753, FAX 001-1-802-769-7226. The e-
mail address is edahelp@us.ibm.com.
Encounter Test And Diagnostics Licenses
Refer to Encounter Test and Diagnostics Product License Configuration in Encounter Test:
Release: Whats New for details on product license structure and requirements.
Using Encounter Test Contrib Scripts
The files and Perl scripts shipped in the <ET installation path>/ etc/tb/
contrib directory of the Encounter Test product installation are not considered as "licensed
materials". These files are provided AS IS and there is no express, implied, or statutory
obligation of support or maintenance of such files by Cadence. These scripts should be
considered as samples that you can customize to create functions to meet your specific
requirements.
What We Changed for This Edition
There are no significant modifications specific to this version of the manual.
October 2015 14 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
1
Building Fault Models
Building a fault model identifies the faults that ATPG, simulation, and diagnostics processes
use. Refer to Concepts for descriptions of the Encounter Test fault types, attributes, status,
and modeling options. The fault models you need depend on your test generation
methodology.
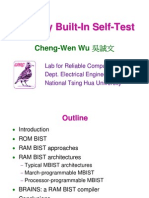
Figure 1-1 shows when to select various types of fault models and where building fault
models fits in the processing flow. Each fault model and associated status is unique; faults
detected in one fault model are not marked in any other fault model. Note that fault models
may be built either before or after test modes are built. However, it is recommended that you
build your test modes and verify them before building the fault model in order to avoid locking
issues.
Figure 1-1 Fault Selection
October 2015 15 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Building Fault Models
The following sections describe how to build each of these types of fault or objective models:
Build Fault Model
The fault model can include Static (Stuck-at), Dynamic (Transition), Iddq, and Parametric
(Driver/Receiver) faults and other pattern faults defined with fault rules. By default, the fault
model includes static, dynamic, and Iddq faults. Parametric (driver/receiver) faults are
included only if they are explicitly selected. Dynamic faults can be excluded if you are not
going to do any delay testing on this design.
To build a fault model using the graphical interface, select Models-Fault Model from the
Verification pulldown on the main GUI window. Refer to Build Fault Model in the Encounter
Test: Reference: GUI.
To build a fault model using command line, use build_faultmodel, which is documented in
Encounter Test: Reference: Commands.
Example syntax for various uses of the build_faultmodel command are provided in the
following sections:
Build Fault Model Examples for Including/Excluding Faults
Build Fault Model Examples for Cell Boundary Fault Model
Build Fault Model Examples with Fault Rule Files
Build Fault Model Examples with Special Handling of Ignored Faults
Build Fault Model Examples for Hierarchical Test - Chip Level
Build Fault Model Input
An Encounter Test Model is the only required input for creating the default fault model.
If test modes exist, they are also used as input to build fault model. The process of building
the fault model is independent of any testmode(s) that might be created and therefore can be
run either before or after defining the testmode(s). The process of identifying active faults per
testmode and initializing the testmode fault status is done during build_faultmodel for all
existing testmodes and is done during build_testmode for any testmodes built after the
fault model exists.
October 2015 16 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Building Fault Models
Tip
It is recommended that you build the fault model after creating and verifying the
testmodes in order to enable building multiple testmodes simultaneously and to
avoid locking issues. However, if you need to build additional testmodes after the
fault model exists, you can do that without having to re-build the fault model.
Fault Rule Files are used as input to building the fault model if you have pattern faults to add
or want to modify the status or inclusion of specific faults (that is, ignore faults, mark faults
redundant, or mark faults detected).
Build Fault Model Output
The binary data files are created and stored in the workdir/tbdata directory for use by
subsequent fault oriented tasks such as ATPG, fault simulation, and diagnostics.
Build Fault Model Examples for Including/Excluding Faults
Example 1: Excluding Dynamic Faults
The following syntax turns off dynamic faults in the fault model. The default is to include
dynamic faults.
build_faultmodel workdir=<directory> includedynamic=no
Example 2: Including Faults for Parametric Tests
The following syntax is used to include the driver and receiver faults which are the target of
parametric tests:
build_faultmodel workdir=<directory> includedrvrcvr=yes
Example 3: Including Precollapsed Faults
Identifying Pre-Collapsed faults is common in the industry. However, some test tools include
the faults in their fault models and simply mark their test status based on the faults they target
for test generation. To provide a similar capability, Encounter Test allows specification of the
following syntax to include the pre-collapsed faults for each AND/NAND, OR/NOR, and BUF/
INV in the fault model and simply marks the extra faults as collapsed unless collapsefaults=no
is also specified as in Example 4: Including Collapsed Faults.
build_faultmodel workdir=<directory> precollapsed=yes
Example 4: Including Collapsed Faults
October 2015 17 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Building Fault Models
In addition to the pre-collapsed faults discussed in the previous example, build fault model
also analyzes the design and collapses faults that are logically equivalent between gates
(such as faults on a string of buffers where the test for the s-a-0 fault on the output of the first
BUF in the string will also test the s-a-0 faults on the outputs of all the other BUFs in that
string). Fault collapsing, which is industry standard, allows the test generator to work on a
single fault (called the Independent fault or the Equivalence Class Representative, ECR) and
then fault simulation marks all the equivalent faults with the same status as the Independent
fault. The following syntax turns off fault collapsing so every fault is independent.
build_faultmodel workdir=<directory> collapsefaults=no
Note that this does not include the pre-collapsed faults unless you include them with
precollapsed=yes on the same command line.
Example 5: Excluding Scan Chain Faults
Excluding scan chain faults reduces the size of the fault model and reduces simulation time
during create_scanchain_tests. Test generation will not have any scan faults to work on in this
case so scanchain tests need to be run with good machine simulation
(create_scanchain_tests gmonly=yes or create_scanchain_delay_tests
gmonly=yes).
To exclude scan faults from the fault model, prior to build_faultmodel, create a full scan test
mode and then specify its name in the excludescanmode keyword as shown in the example
below:
build_faultmodel excludescanmode=FULLSCAN
Build fault model processes the specified testmode and removes faults along the scan chain
that would be easily tested by scanchain or logic tests.
Notes
Although this technique is supported, it is rarely used.
An alternative that reduces test generation time while keeping the faults in the coverage is
to use a priori fault markoff. See Removing Scan Faults from Consideration.
Build Fault Model Examples for Cell Boundary Fault Model
Encounter Test provides comprehensive fault modeling capabilities that includes modeling at
technology cell boundaries and at the primitive level. The default is to fault at the primitive
level.
October 2015 18 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Building Fault Models
Example 6: Building Industry Compatible Fault Model
The following syntax on build_model causes Encounter Test to model faults at the cell
boundary level with a single pair of faults at the cell boundary even when a net fans out
internally from a cell input pin. This fault modeling is the default behavior in when the model
is built with industrycompatible=yes. The build_model process inserts a buffer into
the flattened model so a single pair of faults can be built at the cell boundary, as shown in
Figure 1-2 (industrycompatible=yes).
build_model workdir=<directory> industrycompatible=yes
build_faultmodel workdir=<directory>
Example 7: Building Cell Fault Model without Industry Compatible
The following syntax causes Encounter Test to model faults at the cell boundary level with
multiple pairs of faults included when a net fans out internally from a cell input pin. This is
depicted in Figure 1-2 on page 19 (industrycompatible=no).
build_faultmodel workdir=<directory> cellfaults=yes
Figure 1-2 Fault Model Compatibility with Other Tools
Build Fault Model Examples with Fault Rule Files
Example 8: Using Fault Rule Files named by Verilog Module Name
October 2015 19 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Building Fault Models
The following syntax selects fault rule files to be applied based on cell block name
(cellnamefaultrules=yes causes build_faultmodel to search the directories
specified in faultpath looking for each cell in the design) :
build_faultmodel cellnamefaultrules=yes faultpath=/dir1/faultrules1:/dir1/
faultrules2:/dir2/faultrules3
This assumes the fault rule files are named based on the cell name (Verilog module name).
That is, the file name and the name on the Entity statement in the fault rule match.
File name is: tech_AND
Fault rule file contains: Entity = tech_AND
When any instance of tech_AND is found in the model, this fault rule will be applied to modify
the default faulting assumptions on that cell.
Example 9: Using Fault Rule Files with User-selected Names
A user-specified fault rule name may be identified with the FAULTS attribute in the Verilog
(see Using Design Source Attributes to Add/Remove Faults) or may be identified directly on
the command line with the faultrulefile keyword on the build_faultmodel command line.
The following syntax selects the fault rule files to be applied based on the file names in the
FAULTS attributes and the directories listed in the faultpath keyword.
build_faultmodel faultpath=/dir/faultrule1:/dir/faultrule2:/dir2/faultrule3
The following syntax selects the fault rule file to be applied based on the names of the files in
the faultrulefile keyword:
build_faultmodel faultrulefile=/dir1/myfaultrule1,/dir1/myfaultrule2,/dir2/
myfaultrule3
October 2015 20 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Building Fault Models
Notes
If faultpath and faultrulefile are both specified on the command line files specified with the
faultrulefile keyword are processed before the rules from the faultpath keyword. This is
especially important for fault rules containing statements where the order of the statements
matters, such as NOFAULT or FAULTONLY statements.
If is recommended that you not include more than one fault rule that contains rule data for
the same entity (Verilog module, hierBlock in the model).
If the same filename happens to exist in more than one of the directories specified in
FAULTPATH, the one found in the first directory is used (searching left to right in the list
provided to the keyword).
If you use FAULTS attributes and the files are not found during build_faultmodel, a
message is printed to let you know it is missing. If you use cellnamefaultrules=yes and name
your files according to the cell name, build_faultmodel checks for fault rules for every
cell and since it doesnt expect to find them for every cell, no message is printed for missing
names.
Dynamic faults defined in a fault rule file are always included in a fault model, regardless of
whether dynamic faults are requested to be created when the fault model is built.
All faults defined in a fault rule are included regardless of any NOFAULTing or other fault
removal. If the fault is defined in a fault rule, it is assumed that you want it to be included.
Build Fault Model accepts compressed or gzipped versions of fault rule files to conserve
memory when processing large files.
Build Fault Model Examples with Special Handling of Ignored Faults
Example 10: Including Ignored Faults in the Fault Model
By default, ignored faults are not included in the Encounter Test fault model; unless the model
is built with industrycompatible=yes. A count of the number of uncollapsed ignored
faults that would have been included is calculated and printed, but the actual faults cannot be
reported. This behavior reduces the size of the fault model for customers who dont need
details about these faults. An example of the report in the Build Fault Model log is below:
Global Ignored Static Fault Count: 100
Global Ignored Dynamic Fault Count: 200
October 2015 21 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Building Fault Models
The following syntax includes the ignored faults in the fault model and provides the ability to
list them. However, the ignored faults are not collapsed, are not categorized, and are not
included in any fault calculations. The output in the Build Fault Model log looks the same as
without includeignore=yes; the same as the 2 lines above that provide the counts.
build_faultmodel includeignore=yes
Example 11: Accounting for Ignored Faults in Reports/Statistics
The following syntax analyzes the globally ignored static and dynamic faults and categorizes
the ignored attribute.
build_faultmodel includeignore=yes ignorefaultstatistics=yes
On specifying the above keywords, build fault model accumulates global data (uncollapsed)
fault counts for each of the categories for static and dynamic faults separately. These are then
printed in the Build Fault Model log in place of the 2 line fault counts. An example is below.
Global Static Total Ignored (undetectable) Fault Count: 100
Ignored-Tied Fault Count: 40
Ignored-Unconnected Fault Count: 20
Ignored-Blocked Fault Count: 40
Global Dynamic Total Ignored (undetectable) Fault Count: 200
Ignored-Tied Fault Count: 80
Ignored-Unconnected Fault Count: 40
Ignored-Blocked Fault Count: 80
Notes
Using includeignore=yes without ignorefaultstatistics (or with
ignoredfaultstatistics=no) causes the output of report_faults ignored=yes
to report the ignored faults as I without any additional categorization.
In addition to categorizing the total fault counts in the build_faultmodel log, specifying
ignoredfaultstatistics=yes also:
causes the output of report_faults ignored=yes to categorize the ignored faults
as It (tied), Iu (unconnected), or Ib (blocked). See Report Faults
causes the ignored faults to be included in the global test coverage calculation.
Build Fault Model Example for Hierarchical Test - Chip Level
Build Fault Model supports hierarchical test with the coremigrationpath keyword. This
keyword is used to identify the location of the core migration directory for each core that is
instanced on the chip (SOC). The output from prepare_core_migration_faults is
October 2015 22 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Building Fault Models
found in these directories and is used to provide a count of core internal faults that are not
visible in the chip model due to use of core migration models for the cores. These counts are
added into the totals for the chip (SOC).
An example of the command line for this purpose is:
build_faultmodel coremigrationpath=/hierTest/core1migr:/hierTest/core2migr
Refer to Build Fault Model in Encounter Test: Reference: GUI
Refer to build_faultmodel in the Encounter Test: Reference: Commands for complete
syntax of the command line.
Build Alternate Fault Models
Encounter Test supports the creation of alternate fault models as a means to temporarily
replace or augment the standard Encounter Test fault model without having to rebuild the files
associated with the standard fault model. One example of how the alternate fault model could
be advantageous is during diagnostic simulation where shorted net fault descriptions not
typically found in the standard fault model, could be found in an alternate fault model, and thus
able to be considered in diagnostic simulation. The alternate fault model file names are
differentiated from the standard fault model files by adding your own identifier as a file name
qualifier using either the Build Alternate Fault Model window or command line.
The following syntax builds an alternate fault model named SHORTEDNET with the shorted-
nets faults from prepare_shorted_nets included in with the standard faults.
build_alternate_faultmodel workdir=<mydir> ALTFAULT=SHORTEDNET faultpath=<path to
faultrules created by prepare_shorted_nets> cellrulefaultnames=yes
October 2015 23 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Building Fault Models
Notes
For alternate fault models to be accessed by Encounter Test applications, the ALTFAULT=
user_specified_name keyword must be specified or set in the environment. If this is
not set, the standard Encounter Test fault model (assuming it has been created) is made
available to the application.
Uncommitted fault status results for an alternate fault model cannot be committed against a
master as there is no master alternate fault model. If commit_tests is run, patterns are
commited but not the fault coverage. To gain credit in the master falut model built by
build_faultmodel, the patterns must be resimulated without the ALTFAULT keyword
prior to commit_tests.
To perform Build Alternate Fault Model using the graphical interface, refer to Build Alternate
Fault Model in the Encounter Test: Reference: GUI.
For a complete description of the build_alternate_faultmodel syntax, refer to
build_alternate_faultmodel in the Encounter Test: Reference: Commands.
build_alternate_faultmodel has the same fault selection options and input file
requirements as build_faultmodel. The only difference in the output is the identification of the
data by the ALTFAULT name.
Prepare Path Delay Faults
The faults for path delay test are identified by specifying a list of paths to be included and are
saved by a user specified path name. You may build the path delay faults using
prepare_path_delay. Or, you may have the path delay faults built as part of the
create_path_delay_tests command by specifying a pathfile. In either case you can run
one or more create_path_delay_tests experiments against those faults by specifying
the pathname.
Prepare Path Delay is run using a command line such as the one below. Refer to
prepare_path_delay in the Encounter Test: Reference: Commands for complete syntax.
prepare_path_delay workdir=myworkdir testmode=FULLSCAN pathfile=/dir/mypathfile
maxnumberpaths=10 pathname=mypaths
The maxnumberpaths is an optional keyword that indicates how many paths are to be
created along the paths specified in the pathfile. The pathname is an optional keyword that
allows you to name the path delay fault model; by default it is named by the name of the
pathfile.
October 2015 24 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Building Fault Models
Prepare Path Delay Inputs
Encounter Test Model from Build Model
Test Mode from Build Test Mode
Path file with the identification of paths for which path faults are to be created
Refer to Path File in Encounter Test: Guide 5: ATPG for syntax of this file.
Prepare Path Delay Outputs
A path delay fault model identified by the pathname or pathfile name.
To reference this path delay fault model in create_path_delay_tests use
pathname=<pathname specified on prepare_path_delay> or, if no pathname
was specified, pathname=<name of the pathfile specified on
prepare_path_delay>.
To reference this path delay fault model on the GUI schematic, set the analysis context
ALTFAULT to Paths.<pathname> or Paths.<pathfile name>
Example 1: prepare_path_delay pathfile=/dir/mypathfile
create_path_delay_tests pathname=mypathfile
GUI ALTFAULT: Paths.mypathfile
Example 2: prepare_path_delay pathfile=/dir/mypathfile pathname=mypaths
create_path_delay_tests pathname=mypaths
GUI ALTFAULT: Paths.mypaths
The output log reports the number of path groups created as shown below. Use
report_path_faults for more information about the paths.
INFO (TPT-315): 18 path groups are defined. [end TPT_315]
Build Package Test Objectives
The package test objectives are stuck-driver, shorted-nets and optionally slow-to-disable
objectives described in Concepts. The command is build_sdtsnt_objectives (sdtsnt
means stuck-driver test/shorted-nets test).
The following syntax builds the stuck-driver and shorted-nets test objectives as well as the
slow-to-disable objectives:
build_sdtsnt_objectives workdir=myworkdir objectivefile=myslowdisables
October 2015 25 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Building Fault Models
Note: The package test objectives can also be built with the fault model by specifying
sdtsnt=yes on the build_faultmodel command line.
Build Package Test Objectives Input
Encounter Test Model from Build Model
Test Modes built with a mode definition file that indicates the test type is
INTERCONNECT (for MCM, 3D or Interposer test) or IOWRAP for chip test. See Mode
Definition file Statement TEST_TYPES in Encounter Test: Guide 2: Testmodes. Note
that the testmode keyword is not specified on the build_sdtsnt_objectives
command line; the objectives are built and made active for every applicable testmode.
Objective file (optional). Identfies slow-to-disable faults for interconnect tests.
The objectivefile is used to notify Encounter Test where to define slow-to-disable
objectives. The syntax for the objective file:
PIN<short_chip_pin_name1> PIN<short_chip_pin_name2>
where the first short_chip_pin_name1 identifies the backtrace point for the driver
getting the disable transition (i.e. to be slow-to-disable tested) and the second
short_chip_pin_name2 identifies the backtrace point for the driver getting the
enable transition.
Each pair of pin names identifies a single net driven by both chips. This net is the target
slow-to-disable objective net. Two objectives are defined for each pin pair where 1->Z
and 0->Z are the required transitions on the driver being tested for slow disable.
Build Package Test Objectives Output
There are multiple representations of these objectives:
The package test objectives model
The stuck-driver test faults included in alternate fault model ##TB_SDT
When you run create_interconnect_tests or create_iowrap_tests, there is no
need to identify the objectives, they are known from the existence of the package test
objectives model.
If you want to analyze the stuck-driver objectives on the GUI or report the stuck-driver test
faults, specify ALTFAULT in the analysis context or on the command line as ##TB_SDT.
October 2015 26 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Building Fault Models
Build Bridge Fault Model
Bridge faults can be included in the standard Encounter Test fault model or can be included
separately in an alternate fault model using the build_bridge_faultmodel command.
The build_bridge_faultmodel command can automatically identify the potential bridge
candidates based on net adjacency using the physical design information from OpenAccess
(OA). This process extracts neighboring nets for every logical net from the OA database to
create net pairs. A net pair is a pair of nets that are adjacent to each other on one or more
metal layers. If you do not have an OA database, a text file containing net pairs is used as
input; identified with the innetpairfile keyword. Refer to Net Pair File on page 28 for
more information.
Bridge faults are built using the net pairs extracted from OA or from the input net pair file.
These optionally may be written out as a faultrule file. By default, the command builds four
static bridge faults for each net pair. If includedynamicbridge=yes, then four dynamic
bridge faults are also built.
Refer to build_bridge_faultmodel in the Encounter Test: Reference: Commands
for details of the command line.
Build Bridge Fault Model Input
There are two required inputs to build_bridge_faultmodel:
The Encounter Test Model
An identification of the source of net pairs (OA database or net pair file)
If testmodes exist, they are also used as input to build_bridge_faultmodel.
When building a standard faultmodel, the testmode processing is the same as for
build_faultmodel; the active faults for each existing testmode are identified.
When building an alternate faultmodel, the testmodelist keyword is used to identify the
testmode(s) to which this alternate fault model applies.
A faultrule file also may be used as input if you are building a standard fault model. This
faultrule file would not contain bridge faults but might contain some other type of pattern fault.
October 2015 27 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Building Fault Models
OpenAccess Database
If you have an OpenAccess (OA) database containing physical layout, you may use this as
input to build the bridge faults. As this is based on the physical layout of the design, the
identification of proable candidates for a bridge defect can be done accurately.
Refer to Physical Diagnostics in Encounter Test: Guide 7: Diagnostics for information
on Creating the OA Database and on how to report Physical Correlation. You should analyze
the Physical Correlation results to ensure good correlation prior to running
build_bridge_faultmodel.
The following keywords are used to identify the OA database:
oapath - directory containing the OA database (the cds.lib file should be in this
directory)
oalib -- library name associated with the physical design in the OA database
oaview - cell view associated with the physical design in the OA database (typically
layout)
oacell - cell name of the top level physical design in the OA database
The following keywords are used to determine the adjacent nets, in the physical design
described by the OA database, for which to model bridge faults:
coverage - percent target coverage of adjacent metal for the bridge faults in the fault
model.
proximity - greatest distance ,in microns, between two shapes to have them
considered adjacent
layerminspacing - choose whether the minimum spacing or maximum spacing value
for each metal layer is to be used to determine the proximity
faults - the maximum number of bridge faults to be included in the fault model.
Net Pair File
The objective of creating a net pair file is to identify to Encounter Test pairs of nets which are
most prone to bridge defects. You can use any Design for Manufacturability (DFM) strategies
available in the industry to identify candidate bridge net pairs. Encounter Test accepts a
generic format for identifying such net pairs as shown in the following example. The net pair
file is used for building a bridge fault model for use by Encounter Test.
The following is a sample format:
October 2015 28 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Building Fault Models
THE_REG_FILE.n_44 THE_REG_FILE.n_2403
THE_REG_FILE.n_4156 THE_REG_FILE.n_2403
THE_REG_FILE.n_88 THE_REG_FILE.n_2403
SCAN_ENABLE THE_REG_FILE.n_2403
THE_REG_FILE.n_1447 THE_REG_FILE.n_2403
THE_REG_FILE.n_1065 THE_REG_FILE.n_2403
THE_REG_FILE.n_4030 THE_REG_FILE.n_2403
THE_REG_FILE.n_539 THE_REG_FILE.n_2403
THE_REG_FILE.n_180 THE_REG_FILE.n_2403
The net pair file is identified with the innetpairfile keyword on the command line.
Build Bridge Fault Model Output
The binary files are created and stored in the workdir/tbdata directory.
You may request that the net pair file generated from OA be written out to a file specified with
the netpairfile keyword. In this case, the fault model is not created in tbdata. It is
assumed that you are writing the netpairfile out to a file so that you can edit it and then use it
as input to build_bridge_faultmodel with the innetpairfile keyword.
You may request that the internally generated bridge faults be written out as a fault rule file
specified with the outfaultrulefile keyword. In this case, the fault model is not created
in tbdata.
Applications that Support Bridge Faults
The following Encounter Test commands support simulation of bridge faults when selected
with the faulttype keyword:
create_logic_tests / create_logic_delay_tests
create_random_tests
simulate_vectors / analyze_vectors
The following Encounter Test commands target bridge faults for top-off test generation:
create_bridge_tests - creates tests for, and simulates, static bridge faults
create_bridge_delay_tests - creates tests for dynamic bridge faults, simulation of
these tests is done against dynamic and static bridge faults unless overridden with the
faulttype keyword.
Note: Tests generated and/or simulated against bridge faults can be committed.
The following fault commands can process bridge faults:
October 2015 29 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Building Fault Models
prepare_detected_faults / prepare_ignore_faults
report_faults
report_fault_statistics
The diagnostics using bridge faults continues to be supported.
Build Bridge Fault Model Scenarios
Using the build_bridge_faultmodel command to create a bridge fault model is useful
in the following scenarios. Each scenario includes a sample set of commands with a variety
of using either OA database or a net pair file as input to building the bridge fault model. Note
that there is no restriction on selecting either OA or net pair file in these scenarios; the choice
is based on the availability:
Scenario 1: Use Model for ATPG with Bridge Faults
You can generate test patterns for stuck and/or delay fault models while simulating these test
vectors against the bridge fault model using create_logic_tests or
create_logic_delay_tests with the faulttype keyword. Additional patterns can be
generated using create_bridge_tests or create_bridge_delay_tests commands
to target any remaining untested bridge faults. This will generate a higher-quality test set.
build_bridge_faultmodel includestaticbridge=yes \
oapath=/path/to/oa oalib=myoalib oaview=layout oacell=mytop
create_logic_tests testmode=xxx experiment=tg1 faulttype=static,staticbridge
commit_tests testmode=xxx inexperiment=tg1
create_bridge_tests testmode=xxx experiment=topoff
commit_tests testmode=xxx inexperiment=topoff
Scenario 2: Simulate Vectors with Bridge Faults
You can simulate traditional stuck and/or delay patterns using simulate_vectors or
analyze_vectors with the bridge fault model to generate bridge fault coverage. Bridge
fault coverage is a quality metric that you can use to evaluate the quality of test patterns. This
may be done by including the bridge faults in the standard fault model or by creating an
alternate fault model (ALTFAULT) that includes only the bridge faults.
Example using standard fault model that also includes bridge faults:
build_bridge_faultmodel innetfile=./mynetpairs \
includestaticbridge=yes includedynamicbridge=yes
simulate_vectors testmode=xxx faulttype=staticbridge,dynamicbridge \
October 2015 30 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Building Fault Models
experiment=exp1 <options>
Example using alternate fault model with only bridge faults:
build_bridge_faultmodel innetpairfile=./mynetpairs altfault=bridgeflt \
includestaticbridge=yes includedynamicbridge=yes
simulate_vectors testmode=xxx altfault=bridgeflt \
experiment=exp1 <options>
Scenario 3: Performing diagnostics with no additional pattern generation and
resimulation
In this scenario, if the fail data was caused by a bridge defect, and that defect is modeled in
the bridge fault model and is not present in the scan chain, diagnose_failset_logic will
identify the bridge defect with a maximum score.
build_bridge_faultmodel altfault=bridgeflt \
oapath=/path/to/oa oalib=myoalib oaview=layout oacell=mytop \
includestaticbridge=yes includedynamicbridge=yes
diagnose_failset_logic testmode=xxx altfault=bridgeflt <options>
October 2015 31 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Building Fault Models
October 2015 32 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
2
Modifying Fault Model/Fault Status
Encounter Test allows specification of attributes in the model to add faults that would not be
included by default or to remove faults that would be included by default.
Using Model Attributes to Add/Remove Faults
This section discusses the following topics:
Fault Attribute Specification in Verilog Design Source
Fault Attribute Specification in Edit Model File
Fault Attribute Specification in Verilog Design Source
Encounter Test allows specification of attributes in technology library or design source to add
faults that would not be included by default or to remove faults that would be included.The
following is a set of fault specifications that can be placed on instance pins of logic primitives
and the values that are allowed for the attribute:
PFLT (Pin FauLT) -- these are stuck-at (also known as static) faults
PFLT=NO remove all stuck-at faults from this pin
PFLT=0 include only a stuck-at-0 on this pin
PFLT=1 include only a stuck-at-1 on this pin
PFLT=01 include both stuck-at-0 and stuck-at-1 on this pin
TFLT (Transition FauLT) these are transition (also known as delay or dynamic) faults
TFLT=NO remove all transition faults from this pin
TFLT=0 include a slow-to-fall transition fault on this pin
TFLT=1 include a slow-to-rise transition fault on this pin
October 2015 33 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Modifying Fault Model/Fault Status
TFLT=01 include both slow-to-fall and slow-to-rise transition faults on this pin
DFLT (Driver FauLT) -- these are driver objectives for parametric test
DFLT=NO remove the driver objective from this pin
RFLT (Receiver FauLT) these are receiver objectives for parametric test
RFLT=NO remove the receiver objective from this pin
The following attributes can be placed on the instance of a primitive or a cell (Verilog module)
depending on the value of the attribute:
FAULTS=NO - specified on an instance of a primitive to remove all faults from that
primitive
FAULTS=<filename> - specified on a cell (Verilog module) to include faults in the fault
rule with the specified filename.
The following is an example of Verilog using PFLT and FAULT syntax this example is
unrealistic and is included just to show placement of the attributes:
Figure 2-1 Fault Attributes in Verilog
(* FAULTS="mypflt" *) module pflt_test (y, a1, a2, a3, b1, b2, b3);
input a1, a2, a3, b1, b2, b3;
output y;
wire nb1_S001, na1_S003;
(* FAULTS="NO" *) nor y_G001(y, na1_S003, nb1_S001);
and nb1_G (nb1_S001, (* PFLT="01" *) b2, b1,(* PFLT="0" *) b3);
and na1_G (na1_S003, a2, a1,(* PFLT="NO" *) a3);
endmodule
In the above example,
Pattern faults defined in file mypflt in one of the directories specified with the
build_faultmodel FAULTPATH keyword will be included for each instance of this
module
All faults will be removed from the nor gate y_G001 for all instances of this module
Faults SA0 and SA1 will be placed on pin b2 of instance nb1_G for each instance of this
module (instead of only SA1 that would be included by default)
Fault SA0 will be placed on pin b3 of instance nb1_G for each instance of this module
(instead of both SA1 and SA0 that would be included by default)
All static faults will be removed from pin a3 of instance na1_G for each instance of this
module (instead of both SA1 and SA0 that would be included by default)
October 2015 34 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Modifying Fault Model/Fault Status
Notes
The right parenthesis and the semicolon on the and instances MUST NOT be on the
same line as the PFLT attribute as this is illegal Verilog. Encounter Test will issue a
syntax error in this case.
The PFLT, TFLT, and FAULTS attributes are valid only on primitives.
Fault Attribute Specification in Edit Model File
The PFLT, TFLT, DFLT, RFLT, and FAULTS attributes discussed in the previous section can
be included in the model during build_model by specifying them in an Edit Model file rather
than directly in the Verilog Design Source. To do that:
create a file with Edit Model ADD ATTRIBUTE statements.
run: build_model editfile=<filename>
run: build_faultmodel <your normal options> and the faults defined with
the attributes in the edit file will be included/removed as appropriate.
To include the same attributes as shown in the Verilog in the previous section, the file would
look like this:
ADD ATTRIBUTE FAULTS=mypflt on CELL pflt_test ;
ADD ATTRIBUTE FAULTS=NO on INSTANCE y_G001 of CELL pflt_test ;
ADD ATTRIBUTE PFLT=01 on PIN b2 on INSTANCE nb1_G of CELL pflt_test ;
ADD ATTRIBUTE PFLT=0 on PIN b3 on INSTANCE nb1_G of CELL pflt_test ;
ADD ATTRIBUTE PFLT=NO on PIN a3 on INSTANCE na1_G of CELL pflt_test ;
Note: Attributes in the Verilog source can be overridden with an edit file with CHANGE
ATTRIBUTE or DELETE ATTRIBUTE edit model statements.
Using Fault Rule Specification to Add/Remove Faults
A fault rule may be used to:
add user-defined pattern faults to the fault model. These faults are defined with a pattern
of required module input values and expected module output values with and without the
presence of the fault. For dynamic pattern faults, there is also an initial value on the
module inputs.
October 2015 35 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Modifying Fault Model/Fault Status
identify faults as IGNORE, PTAB, DETECTED (i.e., Tested) , REDUNDANT.
remove all faults from an instance within module (NOFAULT INSTANCE name IN
MODULE name)
remove all faults from an instance of a module (NOFAULT BLOCK name)
remove all faults from the entire module (NOFAULT MODULE name)
include faults only on an instance within a module (FAULTONLY INSTANCE name IN
MODULE name)
include faults only in an instance of a module (FAULTONLY BLOCK name)
include faults only in a module (FAULTONLY MODULE name)
There can be multiple NOFAULT and FAULTONLY statements to identify the complete set of
blocks to be faulted or not faulted. See Fault Rule File Syntax in Appendix A for complete
details on the syntax and usage of fault rule file statements including examples.
Preparing a Fault Subset
A fault subset is a set of static, dynamic, and/or parametric faults that are used as input to a
Test Generation or Fault Simulation task. Preparation of a fault subset includes reading an
input fault list which specifies which faults to include and optionally assigns status to the
specified faults. The output is an experiment with the fault subset for use as input to Test
Generation/Fault Simulation runs.
The command line to use is shown in the following syntax:
prepare_fault_subset workdir=myworkdir testmode=FULLSCAN experiment=fltsubset1 /
faultlist=/dir/faults4fs.subset1
The fault list input may be specified as a file using the faultlist keyword as shown above or
may be created with report_faults and piped into the prepare_fault_subset command.
These options are discussed in more detail in the Prepare Fault Subset Input section below.
October 2015 36 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Modifying Fault Model/Fault Status
Notes
If the status of the faults are updated during prepare_fault_subset, the vectors created
using this subset will not be able to be committed.
A GUI form is not available for invocation of prepare_fault_subset; it must be run with a
command line.
For a complete description of the prepare_fault_subset syntax, refer to
prepare_fault_subset in the Encounter Test: Reference: Commands
Prepare Fault Subset Input
Encounter Test model from Build Model
Encounter Test fault model from Build Faultmodel
Encounter Test test mode from Build Testmode
A fault list created manually or from report faults. See the following sections for more
information.
Using the Output from Report Faults to Create an Input Fault List
Typical output from report_faults uses pin names, fault type, and indexes to identify the
faults.
The input to prepare_fault_subset must be referenced by pin name and fault type or by
fault index. The default is to use the pin name and fault type. If the input is to be processed
using fault index, specify prepare_fault_subset -I.
Use one of the following methods to process the output of report_faults with
prepare_fault_subset.
Direct the output of the report_faults command to prepare_fault_subset using the
following syntax:
report_faults faults=1:10 | prepare_fault_subset -I
The output of the report_faults command can be written to a file, edited (if desired),
then read by prepare_fault_subset using the faultlist= <keyword> as shown
in the following steps:
report_faults faults=1:10 > report_faults.out
October 2015 37 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Modifying Fault Model/Fault Status
prepare_fault_subset -I faultlist=report_faults.out
or
report_faults faults=1:10 > report_faults.out
prepare_fault_subset faultlist=report_faults.out
The output of report_faults can be directed to a file using the following syntax:
report_faults faults=1:10 > myfaultlist
myfaultlist can then be edited, then either piped or passed into
prepare_fault_subset using the following syntax:
cat myfaultlist | prepare_fault_subset <parameter>
or
prepare_fault_subset faultlist=myfaultlist <other parameters>
report_faults output can also be piped directly into prepare_fault_subset.
Notes:
1. The selection of faults in report_faults may be done with ranges (as shown in the
previous examples, report_faults faults=1:10 includes 10 faults with indexes 1
through 10), or lists (faults=1,3,5,7 includes only those 4 faults) or a combination of
these (faults=1:10,13,27:29,50 includes 15 faults 1 through 10, 13, 27 through 29,
and 50).
2. The previous examples all show how to obtain the global status for the faults. To obtain
the status from a test mode, specify testmode=testmode_name. The list shows
faults for the specified testmode and also shows the gloabl status of all faults. If you use
the list with two sets of status as input to prepare_fault_subset, the last one should
win; but it is not recommended since this will cause confusion.
3. Refer to the Encounter Test: Reference: Commands for additional report_faults and
prepare_fault_subset options.
4. The fault status characters processed by prepare_fault_subset are the characters
viewed in the output of Report Faults and are limited to U (untested), T (tested), P
(possibly tested), 3,X, or C (possibly tested at best), and R (redundant).
Manually Creating an Input Faultlist File
An input file for Report Faults and Prepare Fault Subset can be manually created. The
following two file formats are acceptable:
The file must include at least two columns: fault index and fault status for fault index
references, as shown in the following example:
October 2015 38 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Modifying Fault Model/Fault Status
21 U
22 T
23 U
or
The file must include pin name, fault type (SA0, SA1, SR, SF), and a fault status character for
fault pin name references, as shown in the following example:
A OSA0 T
A OSA1 U
hadd12.carry2.A0 ISA1 U
Prepare Fault Subset Output
An experiment in tbdata consisting of the fault subset data and an empty vectors file identified
by the specified experiment name.
Using Fault Subset for ATPG / Fault Simulation
When you run ATPG or fault simulation specify the same experiment name as you specified
for prepare_fault_subset and specify append=yes.
For example, if you run: prepare_fault_subset workdir=dir
testmode=FULLSCAN_DELAY experiment=subset1 faultlist=/dir/
mysubsetfile
To use this fault subset in one of these commands you would run:
create_logic_tests testmode=FULLSCAN_DELAY experiment=subset1
append=yes
create_logic_delay_tests testmode=FULLSCAN_DELAY
experiment=subset1 append=yes
create_parametric_tests testmode=FULLSCAN_DELAY
experiment=subset1 append=yes
analyze_vectors testmode=FULLSCAN_DELAY inexperiment=2analyze
experiment=subset1 append=yes
Note: Once you have run a command using the fault subset, the status of the faults in that
subset has changed to match the results from the command you just ran. And the vectors
generated by that run are identified with the experiment from the subset. You may append
October 2015 39 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Modifying Fault Model/Fault Status
again using the same or another command, but the vectors and status from the preceding run
will be used as input (like a normal append run).
Removing Scan Faults from Consideration
A high number of scan faults can be detrimental to the speed of throughput of downstream
test generation applications. The command, prepare_apriori_faults, can be used to
mark scan faults as tested prior to beginning the test generation process.
prepare_apriori_faults marks scan faults as tested but does not remove them from
the fault model.
An alternative method to removing scan faults from consideration is to exclude them from the
fault model. Refer to Example 5: Excluding Scan Chain Faults on page 18 for details.
Refer to prepare_apriori_faults in the Encounter Test: Reference: Commands for syntax
information. The syntax for the command is shown below:
prepare_apriori_faults WORKDIR=<directory> TESTMODE=<testmode name>
Prepare Apriori Faults Inputs
Encounter Test model from build_model
Full Scan Test mode from build_testmode
Fault model from build_faultmodel
Prepare Apriori Faults Outputs
The fault status for the testmode updated with scan faults marked as tested.
Preparing an Ignore Faults File
The prepare_ignore_faults command creates a fault rule file for a cell with a list of faults
to be marked as ignored when processing the cell at a higher packaging level where the faults
were already proven untestable (redundant) at the cell level. By default, the command
processes Redundant faults but options exist to select Possibly Testable at Best (PTAB) faults
or faults untestable due to X-source. There is also an option to mark the redundant faults as
Redundant instead of Ignored.
Faults considered by this command are stuck-at and transition (slow-to-rise and fall). Driver
and receiver faults are not considered.
October 2015 40 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Modifying Fault Model/Fault Status
To prepare ignore faults, refer to prepare_ignore_faults in the Encounter Test: Reference:
Commands. A sample command line is shown below:
prepare_ignore_faults WORKDIR=mywd TESTMODE=FULLSCAN OUTFAULTDIR=./myfaultdir
Prepare Ignore Faults Inputs
Encounter test model from build_model
Test mode from build_testmode
Fault model and status from build_faultmodel
For redundant or untestable due to X-source faults to be processed an experiment from
ATPG or committed ATPG data must be provided.
Prepare Ignore Faults Outputs
The output from prepare_ignore_faults is the file specified by the outfaultfile and/
or OUTFAULTDIR keywords.
The following is an example of the fault rule data in the output file:
Entity = BTTP
/* Start prepare_ignore_faults fault rule creation. Version 7.3 Date 19970306215136
*/
IGNORE { PATTERN 1 BLOCK
BLTI_p_model_p_blth_p_B_LATCH_p_BLT_DATAI_OUT$OMX104.0000100.master }
IGNORE { PATTERN 2 BLOCK
BLTI_p_model_p_blth_p_B_LATCH_p_BLT_DATAI_OUT$OMX104.0000100.master }
IGNORE { SA0 PIN BLTI_p_DRV103.0000101.01 }
IGNORE { SA0 PIN BLTI_p_DRV106.0000101.01 }
IGNORE { SA0 PIN BLTI_p_DRV110.0000101.01 }
.
.
.
IGNORE { SA1 PIN btext_p_mb_data_cio000.EnbAnd.A2 }
IGNORE { SA1 PIN btext_p_mb_data_cio001.EnbAnd.A2 }
IGNORE { SA1 PIN btext_p_mb_data_cio002.EnbAnd.A2 }
IGNORE { SA1 PIN btext_p_mb_data_cio003.EnbAnd.A2 }
IGNORE { SA1 PIN btext_p_mb_data_cio004.EnbAnd.A2 }
Note: If you edit this fault rule file or generate your own fault rule file, keep in mind that the
ENTITY statement is required for all fault rule files.
October 2015 41 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Modifying Fault Model/Fault Status
Preparing Detected Faults File
The prepare_detected_faults command creates a fault rule file for a cell (ordinarily a
full chip) with a list of faults to be marked as detected when processing the cell at a higher
packaging level (ordinarily the SCM containing just this chip). This capability is useful if it is
known that the same tests applied to the chip are to be applied to the SCM. The fault rule file
created by this step can be read in when the fault model is later created for the SCM. This will
cause the faults that were detected at the chip level to be initialized to detected status in the
fault model for the SCM, thus circumventing the need to explicitly perform test generation for
these faults at the SCM level.
Faults considered by this command are stuck-at and transition (slow-to-rise and fall). Driver
and receiver faults are not considered.
To prepare detected faults, refer to prepare_detected_faults in the Encounter Test:
Reference: Commands. A sample of the command is shown below:
prepare_detected_faults WORKDIR=mywd TESTMODE=FULLSCAN EXPERIMENT=tg1
OUTFAULTDIR=./myfaultdir
Prepare Detected Faults Inputs
Encounter test model from build_model
Test mode from build_testmode
Fault model from build_faultmodel
Fault status from test generation on the cell; experiment or committed. Refer to Test
Generation and Fault Simulation in the Encounter Test: Guide 5
: ATPG.
Prepare Detected Faults Outputs
The output from prepare_detected_faults is the file specified by the outfaultfile
and/or OUTFAULTDIR keywords.
The following is an example of the fault rule data in the output file:
Entity = newpart
DET { PATTERN 1 BLOCK c1.b1.f1.dff_primitive.slave }
DET { PATTERN 4 BLOCK c1.b1.f1.dff_primitive.slave }
DET { PATTERN 5 BLOCK c1.b1.f1.dff_primitive.slave }
October 2015 42 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Modifying Fault Model/Fault Status
Prepare Core Migration Faults (Hierarchical Test - Core
Level)
This preparation process derives information from the core faultModel that will be used when
the faultModel is built at the chip level. The information it gathers is for faults that are
associated with logic that is not included in the core migration model (that is, the faults that
are in the INTEST testmodes but not in the EXTEST testmodes - refer to Test Modes for
Hierarchical Test in Encounter Test: Guide 2: Testmodes ). The information includes the
total number of faults and the number of detected faults in the logic that is not included in the
core migration model. It writes the out-of-context core fault information into the core migration
directory as a fault rule file that is read in during build_faultmodel at the chip (SOC) level.
Refer to Prepare Core Migration Faults in Encounter Test: Reference: GUI for information
on running the command using the graphical user interface.
Refer to prepare_core_migration_faults in the Encounter Test: Reference: Commands for
complete syntax of the command line.
Example of prepare_core_migration_faults:
prepare_core_migration_faults workdir=/hierTest/core1 \ coremigrationdir=/
hierTest/core1migr testmode=COMPRESSION_INTEST
The output of this command (in the <coremigrationdir>/
<Verilog_Module_for_Core_Top>) is used as input to build_faultmodel when
processing the chip (SOC). Refer to Build Fault Model Example for Hierarchical Test - Chip
Level on page 22.
Note: This command is run for each testmode on the out-of-context core.
October 2015 43 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Modifying Fault Model/Fault Status
October 2015 44 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
3
Reporting Faults, Test Objectives, and
Statistics
This chapter covers the Encounter Test tasks for reporting individual test objectives and
reporting test coverage statistics.
Report Faults
To produce a fault report using the graphical interface, refer to Report Faults in the
Encounter Test: Reference: GUI.
For a complete description of the report_faults syntax, refer to report_faults in the
Encounter Test: Reference: Commands.
The syntax for the report_faults command is given below:
report_faults workdir=<directory> testmode=<name> experiment=<name> /
faultstatus=untested faulttype=static inputcommitted=no ignored=yes
To view a list of faults in the fault model or objective model, select Report - Faults - Logic
Faults from the main menu. Report Faults displays the contents of a fault model and/or an
objective model in the Encounter Test Log window.
Report Faults Output
Report Faults produces the following information:
Fault - Each fault is assigned a unique identifier called the fault index.
Status - The status of the fault.
Type - The type of the fault in the fault model.
Func - The simulation function of the logic driving the net where the fault effect origin.
Fault pin name/Propagation net name.
October 2015 45 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Reporting Faults, Test Objectives, and Statistics
Additional ouptut may be displayed through the use of Advanced options.
Report_faults Options
The fault status (status) and fault type (type) keywords are used to specify the data to report.
Refer to report_faults in the Encounter Test: Reference: Commands for more
information.
Fault Status
Fault status refers to the set of attributes of a fault that change during processing by
Encounter Test applications. Of primary interest among these attributes are those that
denote whether a test has been generated for the fault, but there are several other
attributes that affect Encounter Test processing or which may be useful in the analysis of
a design's testability.
The report faults function optionally prints a status key as shown in Figure 3-1, which
explains the notation that is used in the fault listing to denote fault status. The key
includes some Fault Attributes and Fault Test Status.
Figure 3-1 Fault Status Key - available through msgHelp TFM-705 or optionally
included in log (reportkey=yes)
Status key:
i= inactive in testmode
c= collapsed - listed after equiv. class representative fault
u= untested - not processed
I= ignored (unclassified)
It= ignored (tied)
Iu= ignored (unconnected)
Ib= ignored (blocked)
T= tested by simulation
Ti= tested by implication
P= possibly tested (limit not reached)
Tpdl=tested (possibly detected limit reached)
Tm= tested in another mode
Tus= tested user specified (DETECTED statement)
A= Aborted
R= redundant
Rus= redundant: user specified
Ud= untestable: undetermined reason
Uus= untestable: user specified
Ulh= untestable: linehold inhibits fault control/observe
Utm= untestable: testmode inhibits fault control/observe
Ucn= untestable: constraint
Uxs= untestable: X source or sinked
Usd= untestable: sequential depth (may be testable with more sequential depth)
Ugt= untestable: Global termination
Unio=untestable: seq or control not specified to target fault (PI to PO Path)
Unil=untestable: seq or control not specified to target fault (PI to LATCH Path)
Unlo=untestable: seq or control not specified to target fault (LATCH to PO Path)
October 2015 46 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Reporting Faults, Test Objectives, and Statistics
Uner=untestable: seq or control not specified to target fault (interdomain LATCH to LATCH)
Unra=untestable: seq or control not specified to target fault (intradomain LATCH to LATCH)
PTAB (Possibly Tested at Best) status:
3 = PTAB 3-State:Untested
P3 = PTAB 3-State:Possibly Tested
T3 = PTAB 3-State:Tested (limit reached)
X = PTAB X-state:Untested
PX = PTAB X-state:Possibly Tested
TX = PTAB X-state:Tested (limit reached)
C = PTAB Clock Stuck Off:Untested
PC = PTAB Clock Stuck Off:Possibly Tested
TC = PTAB Clock Stuck Off:Tested (limit reached)
TiC = PTAB Clock Stuck Off:Tested by implication
Refer to Fault Attributes on page 103 and Fault Test Status on page 108 for more
information.
Fault Type
Fault type refers to the types of faults to be reported. The report_faults command
optionally prints a type key, as shown in Figure 3-2, which explains the notation in the
listing.
Figure 3-2 Fault Type key - available through msgHelp TFM-705 or optionally included
in log (reportkey=yes)
Type key:
& = AND Grouped | = OR Grouped
ISA0 = stuck-at-zero fault on an input pin
ISA1 = stuck-at-one fault on an input pin
ISR = slow-to-rise fault on an input pin
ISF = slow-to-fall fault on an input pin
OSA0 = stuck-at-zero fault on an output pin
OSA1 = stuck-at-one fault on an output pin
OSR = slow-to-rise fault on an output pin
OSF = slow-to-fall fault on an output pin
DPAT = dynamic pattern fault
SPAT = static pattern fault
DRV0 = driver fault driving 0
DRV1 = driver fault driving 1
RCV0 = receiver fault receiving 0
RCV1 = receiver fault receiving 1
SBRG0= static net shorted to 0 bridge fault
SBRG1= static net shorted to 1 bridge fault
DBRG0= dynamic net shorted to 0 bridge fault
DBRG1= dynamic net shorted to 1 bridge fault
IDDQ0= Iddq logic 0 fault
IDDQ1= Iddq logic 1 fault
QPAT = Iddq pattern fault
Refer to Fault Types on page 91 for more information.
Faults
This keyword may be used to report specific fault indexes. Use status=all with faults.
October 2015 47 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Reporting Faults, Test Objectives, and Statistics
Faultlocation=cellpin
If the faultlocation keyword is set as cellpin, the output log reports the highest
level cell boundary pin associated with the fault for a cell boundary fault model, as shown
in the following sample output:
INFO (TFM-705): Global Fault List:
Fault Status Type Sim Func/Cell Name Fault pin name
1 u OSA0 PI DLX_CHIPTOP_READY
2 u OSA1 PI DLX_CHIPTOP_READY
5 u OSA0 PI DLX_CHIPTOP_RESET
6 u OSA1 PI DLX_CHIPTOP_RESET
45 u OSA0 PO DLX_CHIPTOP_A[0]
46 u OSA1 PO DLX_CHIPTOP_A[0]
363 u OSA1 PI DLX_CHIPTOP_DATA[9]
364 u OSA0 PI DLX_CHIPTOP_DATA[9]
381 u OSA0 AO22X2 DLX_CORE.A_REG.CLOCK_GATE.i_07661.Y
382 u OSA1 AO22X2 DLX_CORE.A_REG.CLOCK_GATE.i_07661.Y
385 u ISA1 NOR2BX1 DLX_CORE.A_REG.CLOCK_GATE.i_3.AN
389 u ISA0 NOR2BX1 DLX_CORE.A_REG.CLOCK_GATE.i_3.B
397 u ISA0 SDFFQX1 DLX_CORE.A_REG.STORAGE.Q_N33_reg_31.D
398 u ISA1 SDFFQX1 DLX_CORE.A_REG.STORAGE.Q_N33_reg_31.D
Faultlocation=pin
If the faultlocation keyword is set as pin, the output log reports the primitive pin
name associated with the fault, as shown in the following sample output:
INFO (TFM-705): Global Fault List:
Fault Type Sim Func/ Fault pin name
Status Cell Name
1 u OSA0 PI Pin.f.l.DLX_TOP.nl.DLX_CHIPTOP_READY
2 u OSA1 PI Pin.f.l.DLX_TOP.nl.DLX_CHIPTOP_READY
5 u OSA0 PI Pin.f.l.DLX_TOP.nl.DLX_CHIPTOP_RESET
6 u OSA1 PI Pin.f.l.DLX_TOP.nl.DLX_CHIPTOP_RESET
45 u OSA0 PO Pin.f.l.DLX_TOP.nl.DLX_CHIPTOP_A[0]
46 u OSA1 PO Pin.f.l.DLX_TOP.nl.DLX_CHIPTOP_A[0]
363 u OSA1 PI Pin.f.l.DLX_TOP.nl.DLX_CHIPTOP_DATA[9]
364 u OSA0 PI Pin.f.l.DLX_TOP.nl.DLX_CHIPTOP_DATA[9]
381 u OSA0 OR Pin.f.l.DLX_TOP.nl.DLX_CORE.A_REG.CLOCK_GATE.i_07661.I2.01
382 u OSA1 OR Pin.f.l.DLX_TOP.nl.DLX_CORE.A_REG.CLOCK_GATE.i_07661.I2.01
385 u ISA1 NBUF Pin.f.l.DLX_TOP.nl.DLX_CORE.A_REG.CLOCK_GATE.i_3.__i0.A0
389 u ISA0 NOR Pin.f.l.DLX_TOP.nl.DLX_CORE.A_REG.CLOCK_GATE.i_3.__i1.A2
397 u ISA0 MUX Pin.f.l.DLX_TOP.nl.DLX_CORE.A_REG.STORAGE.Q_N33_reg_31.I1.
udp_1_mux.DATA0
398 u ISA1 MUX Pin.f.l.DLX_TOP.nl.DLX_CORE.A_REG.STORAGE.Q_N33_reg_31.I1.
udp_1_mux.DATA0
Faultlocation=net
If the faultlocation keyword is set as net, the output log reports the name of the net
where the fault effect originates, as shown in the following sample output:
INFO (TFM-705): Global Fault List:
Fault Type Func Propagation net name
Status
1 u OSA0 PI Net.f.l.DLX_TOP.nl.DLX_CHIPTOP_READY
2 u OSA1 PI Net.f.l.DLX_TOP.nl.DLX_CHIPTOP_READY
5 u OSA0 PI Net.f.l.DLX_TOP.nl.DLX_CHIPTOP_RESET
6 u OSA1 PI Net.f.l.DLX_TOP.nl.DLX_CHIPTOP_RESET
45 u OSA0 PO Net.f.l.DLX_TOP.nl.DLX_CHIPTOP_A[0]
46 u OSA1 PO Net.f.l.DLX_TOP.nl.DLX_CHIPTOP_A[0]
363 u OSA1 PI Net.f.l.DLX_TOP.nl.DLX_CHIPTOP_DATA[9]
October 2015 48 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Reporting Faults, Test Objectives, and Statistics
364 u OSA0 PI Net.f.l.DLX_TOP.nl.DLX_CHIPTOP_DATA[9]
381 u OSA0 OR Net.f.l.DLX_TOP.nl.DLX_CORE.A_REG.CLOCK_GATE.i_07661.Y
382 u OSA1 OR Net.f.l.DLX_TOP.nl.DLX_CORE.A_REG.CLOCK_GATE.i_07661.Y
385 u ISA1 NBUF Net.f.l.DLX_TOP.nl.DLX_CORE.A_REG.CLOCK_GATE.i_3.A
389 u ISA0 NOR Net.f.l.DLX_TOP.nl.DLX_CORE.A_REG.CLOCK_GATE.i_3.Y
397 u ISA0 MUX Net.f.l.DLX_TOP.nl.DLX_CORE.A_REG.STORAGE.Q_N33_reg_31.
I1.udp_net_out
398 u ISA1 MUX Net.f.l.DLX_TOP.nl.DLX_CORE.A_REG.STORAGE.Q_N33_reg_31.I1.
udp_net_out
hierstart
Specifies the index value or the name of the hierblock. This keyword is used to request
the fault list for the specific heirarchical block. The default value is a non-hierarchical
format.
hierend
Specifies the number of hierarchical levels up to which faults are to be listed. This
keyword can be set to values <depth>, techcell, or primitive. The default value is
primitive. Following is a sample of the report format for a hierarchical fault listing. The
name of the hierblock is displayed before each hierblock fault heading and fault list.
report_faults hierstart=top hierend=macro
INFO (TFM-705): Global Fault List:
Hier Block/Cell: f.l.DLX_TOP.nl/DLX_TOP, Hier Block ID: 0
Fault Status Type Sim Func/Cell Name Fault pin name
1 u OSA0 PI DLX_CHIPTOP_READY
2 u OSA1 PI DLX_CHIPTOP_READY
5 u OSA0 PI DLX_CHIPTOP_RESET
6 u OSA1 PI DLX_CHIPTOP_RESET
9 u OSA0 PI DLX_CHIPTOP_RESET2
45 u OSA0 PO DLX_CHIPTOP_A[0]
46 u OSA1 PO DLX_CHIPTOP_A[0]
381 u OSA0 AO22X2 DLX_CORE.A_REG.CLOCK_GATE.i_07661.Y
382 u OSA1 AO22X2 DLX_CORE.A_REG.CLOCK_GATE.i_07661.Y
363 u OSA1 PI DLX_CHIPTOP_DATA[9]
Hier Block/Cell: TBB_BSC_MERGED_82/BC_ENAB_NT, Hier Block ID: 64320
Fault Status Type Sim Func/Cell Name Fault pin name
1508 u ISA1 NOR2BXL TBB_BSC_MERGED_82.DFT__0.AN
135098 u ISA0 NOR2BXL TBB_BSC_MERGED_82.DFT__0.AN
135102 u ISA1 NOR2BXL TBB_BSC_MERGED_82.DFT__0.B
135105 u OSA0 NOR2BXL TBB_BSC_MERGED_82.DFT__0.Y
135106 u OSA1 NOR2BXL TBB_BSC_MERGED_82.DFT__0.Y
1430 u ISA1 AO22X1 TBB_BSC_MERGED_82.mux_50_33.DFT__0.A0
1429 u ISA0 AO22X1 TBB_BSC_MERGED_82.mux_50_33.DFT__0.A0
1420 u ISA1 AO22X1 TBB_BSC_MERGED_82.mux_50_33.DFT__0.A1
135174 u ISA0 AO22X1 TBB_BSC_MERGED_82.mux_50_33.DFT__0.A1
1417 u ISA1 AO22X1 TBB_BSC_MERGED_82.mux_50_33.DFT__0.B0
1414 u ISA0 AO22X1 TBB_BSC_MERGED_82.mux_50_33.DFT__0.B0
1407 u ISA1 AO22X1 TBB_BSC_MERGED_82.mux_50_33.DFT__0.B1
135182 u ISA0 AO22X1 TBB_BSC_MERGED_82.mux_50_33.DFT__0.B1
1402 u OSA0 AO22X1 TBB_BSC_MERGED_82.mux_50_33.DFT__0.Y
1398 u OSA1 AO22X1 TBB_BSC_MERGED_82.mux_50_33.DFT__0.Y
October 2015 49 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Reporting Faults, Test Objectives, and Statistics
Hier Block/Cell: TBB_BSC_MERGED_82.mux_55_33/mux_55, Hier Block ID: 64389
Fault Status Type Sim Func/Cell Name Fault pin name
1336 u ISA1 AO22X1 TBB_BSC_MERGED_82.mux_55_33.DFT__0.A0
1335 u ISA0 AO22X1 TBB_BSC_MERGED_82.mux_55_33.DFT__0.A0
1330 u ISA1 AO22X1 TBB_BSC_MERGED_82.mux_55_33.DFT__0.A1
135234 u ISA0 AO22X1 TBB_BSC_MERGED_82.mux_55_33.DFT__0.A1
1323 u ISA1 AO22X1 TBB_BSC_MERGED_82.mux_55_33.DFT__0.B0
1322 u ISA0 AO22X1 TBB_BSC_MERGED_82.mux_55_33.DFT__0.B0
1314 u ISA1 AO22X1 TBB_BSC_MERGED_82.mux_55_33.DFT__0.B1
135242 u ISA0 AO22X1 TBB_BSC_MERGED_82.mux_55_33.DFT__0.B1
1310 u OSA0 AO22X1 TBB_BSC_MERGED_82.mux_55_33.DFT__0.Y
1309 u OSA1 AO22X1 TBB_BSC_MERGED_82.mux_55_33.DFT__0.Y
reportdetails
Specifies that the listing of faults should include the details of the embryonic test for the
fault. Following is an example of the report with reportdetails=yes.
Some points to note:
For static faults, the inputs are above the dashed line and the output is below the dashed
line.
For dynamic faults, there are two dashed lines; you see a pin initialized to a value to set
up the transition then a dashed line, followed by a set of pins/nets set to value (one of
which is the same pin that was previously set to the opposite value), and then the output
is below the second dashed line.
The inputs are positional from top to bottom. The use of net versus pin as the input to be
stim'd is based on how the fault is represented. If it mentions net, then the number is the
index of the net connected to that input pin. If it mentions pin, then the number is the
index of the pin that feeds that input pin.
The output is the pin on the primitive.
The values are shown as good-machine-value / fault-machine-value; but that distinction
actually matters only for the output value. For outputs, the good machine value is the
expected value and the fault machine value is the value in the presence of the fault.
When the specific known value does not matter, it is represented as V and its opposite
is represented as ~V (so if V=1 then ~V=0 and vice versa).
Fault Status Type Sim Func Fault pin name
/Cell Name
40 u ISA1 AND Pin.f.l.littlepart.nl.and2.A2
net 18 1/1
pin 29 0/X
-----------
pin 13 0/1
41 u ISR AND Pin.f.l.littlepart.nl.and2.A2
pin 29 0/0
-----------
October 2015 50 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Reporting Faults, Test Objectives, and Statistics
net 18 1/X
pin 29 1/X
-----------
pin 13 1/0
43 u ISF MUX Pin.f.l.littlepart.nl.select.SEL
pin 29 1/1
-----------
pin 25 V/X
pin 32 X/~V
pin 29 0/X
-----------
pin 39 V/~V
65 u SPAT MUX Pin.f.l.littlepart.nl.select.DOUT
PATTERN 1: auto MUX SEL SA1 | D0 SA1
pin 25 0/X
pin 32 X/1
pin 29 0/X
-----------
pin 39 0/1
The following Figures represent the four faults from the previous report. The encircled
numbers show the embryonic test required to test the faults.
Figure 3-3 Representation of Faults 40 and 41
In good machine, the inputs are 1 and 0 so In good machine, the top input is 1 and the
the output is 0. If fault 40 occurs, the inputs bottom input transitions from 0 to 1. In good
will both be 1 and the output will be 1. machine, the output will be 1. But if fault 41
occurs, the bottom input will not transition in
time and the output will be 0.
October 2015 51 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Reporting Faults, Test Objectives, and Statistics
Figure 3-4 Representation of Faults 43 and 65
In good machine, the value on the select line will In good machine, the value on the select line will
transition from 1 to 0 so the data on the top input be 0 so the data on the top input will be selected
will be selected and the output will be V. If fault and the output will be 0. If pattern fault 65 oc-
43 occurs, the transition will not occur on time curs, then either the select line will be stuck-at 1
and the data on the second input will be selected or the top input will be stuck-at-1. In either case,
and the output will be ~V. the output will be 1.
Reporting Low Power Faults
Example 3-1 on page 52 illustrates a portion of sample output using the report_faults
powercomponent=srpg keyword value to obtain a listing of low power faults that contain
state retention logic. In the report, the Wt (weight) field represents how many faults are
represented by each fault type. For example,
Example 3-1 Power Component Report from report_faults
Experiment Fault List: PM2.atpg
INFO (TLP-603): Getting Power Component instances active in Power Mode PM2. [end
TLP_603]
INFO (TLP-604): Found 30 active instances of Power Component type(s)
srpg in Power Mode PM2.[end TLP_604]
Fault Status Type Pin Func Wt Fault pin name
Hier Block/Cell: inst_C.reg_bank_1.\out_reg[0]/SDRFFRX1M, Hier Block ID: 1862
7412 Cp OSA1 5759 BUF 2 Pin.f.l.top.nl....
7418 u#im SPAT 5766 LATCH 1 Pin.f.l.top.nl....
7419 u#im SPAT 5766 LATCH 1 Pin.f.l.top.nl...
7429 u!sq SPAT 5766 LATCH 1 Pin.f.l.top.nl....
7430 u!sq SPAT 5766 LATCH 1 Pin.f.l.top.nl....
7453 Cp OSA0 5768 NBUF 1 Pin.f.l.top.nl....
7454 u#im OSA1 5768 NBUF 1 Pin.f.l.top.nl....
7461 p!ti OSA1 5772 NBUF 2 Pin.f.l.top.nl....
7512 Xp OSA1 5841 NBUF 1 Pin.f.l.top.nl....
7518 u!ti ISA1 5843 AND 1 Pin.f.l.top.nl....
October 2015 52 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Reporting Faults, Test Objectives, and Statistics
7533 p!ti OSA0 5857 BUF 1 Pin.f.l.top.nl....
7534 p!ti OSA1 5857 BUF 1 Pin.f.l.top.nl...
Hier Block/Cell: inst_C.reg_bank_1.\out_reg[1]/SDRFFRX1M, Hier Block ID: 1910
7578 u!sq SPAT 5916 LATCH 1 Pin.f.l.top.nl....
7579 u!sq SPAT 5916 LATCH 1 Pin.f.l.top.nl....
7610 p!ti OSA1 5922 NBUF 2 Pin.f.l.top.nl....
766 Xp OSA1 5991 NBUF 1 Pin.f.l.top.nl.....
7667 u!ti ISA1 5993 AND 1 Pin.f.l.top.nl....
7682 p!ti OSA0 6007 BUF 1 Pin.f.l.top.nl....
7683 p!ti OSA1 6007 BUF 1 Pin.f.l.top.nl....
.
.
.
Hier Block/Cell: inst_D.reg_bank_3.\out_reg[4]/SDRFFRX1M, Hier Block ID: 3502
13000 p!ti ISA1 10970 AND 3 Pin.f.l.top.nl....
13025 u!sq SPAT 10983 LATCH 1 Pin.f.l.top.nl.....
13026 u!sq SPAT 10983 LATCH 1 Pin.f.l.top.nl....
13057 p!ti OSA1 10989 NBUF 2 Pin.f.l.top.nl....
13108 Xp OSA1 11058 NBUF 1 Pin.f.l.top.nl.....
13114 u!ti ISA1 11060 AND 1 Pin.f.l.top.nl....
INFO (TDA-001): System Resource Statistics. Maximum Storage used during the run
and Cumulative Time in hours:minutes:seconds:
Working Storage = 10,485,188 bytes
Mapped Files = 249,856 bytes
(Paging) Swap Space = 15,974,588 bytes
CPU Time = 0:00:00.10
Elapsed Time = 0:00:00.12 [end TDA_001]
*******************************************************************************
* Message Summary *
*******************************************************************************
Count Number First Instance of Message Text
------- ------ ------------------------------
INFO Messages...
1 INFO (TDA-001): System Resource Statistics. Maximum Storage used during the run
1 INFO (TLP-602): Reading CPF information from the Encounter Test database.
1 INFO (TLP-603): Getting Power Component instances active in Power Mode PM2.
1 INFO (TLP-604): Found 30 active instances of Power Component type(s) srpg in
Power Mode PM2.
*******************************************************************************
Reporting Bridge Faults
To report bridge faults, use report_faults
faulttype=staticbridge,dynamicbridge (to get both static and dynamic bridge
October 2015 53 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Reporting Faults, Test Objectives, and Statistics
faults). The output for bridge faults is in the format shown in Figure 3-5 irrespective of the
setting of faultlocation.
Figure 3-5 Report Bridge Fault Output
Fault Status Type Func Propagation Net Name
1 u SBRG1 cellA NETA=0/1 NETB=1/1 AND_group=2, 3, 4
2 u SBRG1 cellA NETB=0/1 NETA=1/1 AND_group=3, 4, 1
3 u SBRG0 cellA NETA=1/0 NETB=0/0 AND_group=4, 1, 2
4 u SBRG0 cellA NETB=1/0 NETA=0/0 AND_group=1, 2, 3
5 u DBRG1 cellA NETA=1->0/1 NETB=1/1 AND_group=6, 7, 8
6 u DBRG1 cellA NETB=1->0/1 NETA=1/1 AND_group=7, 8, 5
7 u DBRG0 cellA NETA=0->1/0 NETB=0/0 AND_group=8, 5, 6
8 u DBRG0 cellA NETB=0->1/0 NETA=0/0 AND_group=5, 6, 7
The Propagation Net Name shows:
names of the 2 nets that are shorted in the bridge fault
propagation values of the first net (good machine/fault machine); this is the result of the
bridge
required values of the second net (good and fault machine should be the same)
identification of the other three faults included in the AND group. All four faults must be
tested to get credit for testing any of them but fault status is reported individually
If the input to build_bridge_faultmodel was an OpenAccess database, additional
information about the adjacency of the net pairs is provided from report_faults. The
information is as follows:
Total Adjacent Net Run Length (microns): 21.2342
Total (Bridge) Faulted Adjacent Net Run Length (microns): 10.2342 (48.196776% of
total)
Net Adjacency Parameter: layerminspacing=maximum
Report Fault Coverage Statistics
The effectiveness of the test vectors produced by logic test generation is expressed as the
percentage of modeled faults that were detected by simulation of the test patterns. This
percentage is generally called test coverage or fault coverage.
To produce a fault statistics report using the graphical interface, refer to Report Fault
Statistics in the Encounter Test: Reference: GUI.
October 2015 54 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Reporting Faults, Test Objectives, and Statistics
To produce a fault statistics report using command line, refer to report_fault_statistics in the
Encounter Test: Reference: Commands.
Encounter Test can calculate and print the following calculations depending on the value
specified for coveragecredit. A brief description of each calculation and an example
syntax for the report_fault_statistics command is given below. For more
information, refer to Fault/Test Coverage Calculations on page 113.
Encounter Test calculates and prints the following calculations:
TCov
Percentage Test Coverage calculated as the number of active faults with a status of
tested or tested in another mode divided by the total number of active faults.
report_fault_statistics workdir=mywd testmode=FULLSCAN
experiment=tg1 coveragecredit=tested
ATCov
Percentage Adjusted Test Coverage calculated as the number of active faults with a
status of tested or tested in another mode divided by the number of non-redundant,
active faults.
report_fault_statistics workdir=mywd testmode=FULLSCAN
experiment=tg1 coveragecredit=redundant
or, as coveragecredit defaults to redundant:
report_fault_statistics workdir=mywd testmode=FULLSCAN
experiment=tg1
Note: redundant includes tested, so coveragecredit-tested,redundant is the same as
coveragecredit=redundant.
PCov
Percentage Possibly Detected Coverage calculated as the number of active faults with a
status of tested or tested in another mode or possibly tested divided by the total number
of active faults.
report_fault_statistics workdir=mywd testmode=FULLSCAN
experiment=tg1 coveragecredit=possibly
Note: possibly includes tested, so coveragecredit-tested,possibly is the same as
coveragecredit=possibly.
APCov
October 2015 55 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Reporting Faults, Test Objectives, and Statistics
Percentage Adjusted Possibly Detected Coverage calculated as the number of active
faults with a status of tested or tested in another mode or possibly tested divided by the
number of non-redundant, active faults.
report_fault_statistics workdir=mywd testmode=FULLSCAN
experiment=tg1 coveragecredit=redundant,possibly
Note: redundant and possibly include tested, so coveragecredit-
tested,redundant,possibly is the same as coveragecredit=redundant,possibly.
These statistics may be reported for:
The global design
Global fault statistics reflect the committed results for all test modes combined.
An experiment on a test mode
Uncommitted fault statistics reflect the cumulative results for that test mode up to and
including the experiment. This includes all results that were committed at the time the
experiment was created, and includes the tested in another mode status.
The committed results for a test mode
Committed test mode fault statistics reflect the cumulative results for that test mode,
including only the committed results for all test modes. Note that the statistics for a test
mode are affected by the results of some other test mode if some faults have tested in
another mode status.
A comet
Comet fault statistics reflect the cumulative results for all of its member test modes
combined, including only results that have been committed. The calculation and
interpretation of comet fault statistics is the same for both cross-mode markoff comets
and statistics-only comets.
The statistics are reported for each of several different types of faults: static, dynamic, pattern,
PI, PO, etc. Each variable includes only faults that are active; that is:
For global statistics, all non-ignored faults are counted
For test mode statistics, only faults active in the test mode are counted
For comet statistics, a fault is counted if it is active in any test mode in that comet
Following are some sample outputs of fault statistics:
Default output of fault statistics is shown below:
Fault Statistics for Global :
October 2015 56 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Reporting Faults, Test Objectives, and Statistics
INFO (TFM-701): Fault Statistics for Global:
-- ATCov -- ------------- Global Faults ------------------
Global Total Tested Possibly Redundant Untested
Total Static 0.00 30 0 0 0 30
Collapsed Static 0.00 30 0 0 0 30
PI Static 0.00 4 0 0 0 4
PO Static 0.00 2 0 0 0 2
Total Dynamic 0.0 42 0 0 0 42
Collapsed Dynamic 0.00 42 0 0 0 42
PI Dynamic 0.00 4 0 0 0 4
PO Dynamic 0.00 2 0 0 0 2
Parametric
IDDq 0.00 30 0 30
Fault statistics output with testmode specified:
INFO (TFM-701): Fault Statistics for Testmode:COMPRESSION
--- ATCov ----- -------- Testmode Faults-------------- --------
Global Faults -----------
Testmode Global Total Tested Possibly Redundant Untested
Total Tested Possibly Redundant Untested
TotalStatic 0.00 0.00 30 0 0 0 30
30 0 0 0 30
CollapsedStatic 0.00 0.00 30 0 0 0 30
30 0 0 0 30
PIStatic 0.00 0.00 4 0 0 0 4
4 0 0 0 4
POStatic 0.00 0.00 2 0 0 0 2
2 0 0 0 2
Dynamic 0.00 0.00 42 0 0 0 42
42 0 0 0 42
CollapsedDynamic0.00 0.00 42 0 0 0 42
42 0 0 0 42
PI Dynamic 0.00 0.00 4 0 0 0 4
4 0 0 0 4
PO Dynamic 0.00 0.00 2 0 0 0 2
2 0 0 0 2
Parametric
IDDq 0.00 0.00 30 0 30
30 0 30
Path 0.00 0.00 0 0 0
0 0 0
[end TFM_701]
Fault statistics output with options reportpiporows=yes,
reporttype=static,dynamic reportptab=yes and
coveragecredit=tested,possibly:
INFO (TFM-701): Fault Statistics for Global:
October 2015 57 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Reporting Faults, Test Objectives, and Statistics
-- PCov -- ------------- Global Faults ----------------
Global Total Tested Possibly Redundant Untested
Total Static 0.00 74 0 0 0 74
Collapsed Static 0.00 61 0 0 0 61
PI Static 0.00 16 0 0 0 16
PO Static 0.00 2 0 0 0 2
Total Dynamic 0.00 74 0 0 0 74
Collapsed Dynamic 0.00 64 0 0 0 64
PI Dynamic 0.00 16 0 0 0 16
PO Dynamic 0.00 2 0 0 0 2
[end TFM_701]
INFO (TFM-702): Possibly Testable at Best Fault Statistics and Reasons Report
for Global:
-PTBCov- ----Global Faults-----
Global 3-state TIE X CSO
Static 0.00 10 0 0
Dynamic 0.00 10 0 0
[end TFM_702]
Following is an example of the report_fault_statistics output for Global TCov
statistics with ignored fault statistics:
Global Static Total Ignored (undetectable) Fault Count: 100
Ignored-Tied Fault Count: 40
Ignored-Unconnected Fault Count: 20
Ignored-Blocked Fault Count: 40
Global Dynamic Total Ignored (undetectable) Fault Count: 200
Ignored-Tied Fault Count: 80
Ignored-Unconnected Fault Count: 40
Ignored-Blocked Logic Fault Count:80
INFO (TFM-701): Fault Statistics for Global [end TFM_701]
--- TCov --- ------------- Global Faults ----------------------
Global Total Tested Possibly Redundant Untested
Total Static 80.00 1000 800 25 25 50
Collapsed Static 77.50 800 620 20 20 40
Total Dynamic 80.00 2000 1600 50 50 100
Collapsed Dynamic 77.50 1600 1240 40 40 80
Following is an example of the report_fault_statistics output for Global ATCov
statistics with ignored fault statistics:
Global Static Total Ignored (undetectable) Fault Count: 100
Ignored-Tied Fault Count: 40
Ignored-Unconnected Fault Count: 20
Ignored-Blocked Fault Count: 40
Global Dynamic Total Ignored (undetectable) Fault Count: 200
Ignored-Tied Fault Count: 80
Ignored-Unconnected Fault Count: 40
Ignored-Blocked Logic Fault Count: 80
October 2015 58 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Reporting Faults, Test Objectives, and Statistics
INFO (TFM-701): Fault Statistics for Global [end TFM_701]
--- ATCov --- ------------- Global Faults --------------------
Global Total Tested Possibly Redundant Untested
Total Static 91.43 1000 800 25 25 50
Collapsed Static 91.18 800 620 20 20 40
Total Dynamic 91.43 2000 1600 50 50 100
Collapsed Dynamic 91.18 1600 1240 40 40 80
Options for Hierarchical Fault Statistics
hierstart
Specifies the index value or the name of the hierblock. This keyword is used to request
the fault statistics for the specific heirarchical block. The default value is a non-
hierarchical format.
hierend
Specifies the number of hierarchical level upto which fault statistics are to be displayed.
This keyword can be set to values <depth>, techcell, or primitive. The default
value is 1.
Following is a sample output of the heirachical fault statistics for a given testmode.
Hierarchical Fault Stats selected:Total Static
-APCov- --------------------------- Faults --------------------------
----------------
Depth Global Total Untested Tested Possibly Redundant HierName
1 0.00 30 30 0 0 0 topcell /
topcell
2 0.00 8 8 0 0 0 t2/test2
2 0.00 4 4 0 0 0 t11 / test2
2 0.00 8 8 0 0 0 t2 / test1
2 0.00 4 4 0 0 0 t22 / test2
[end TFM_701]
The maximum Global Test Coverage statistics is a part of the Global Fault Statistics. In this
the test modes are listed after the statistics and the details of the statistics is available in the
help for the message TFM-074 and not printed in the output log. A sample output of the
Maximum Global Test Coverage Statistics is shown below:
INFO (TFM-704): Maximum Global Test Coverage Statistics:
%Active #Faults #Active #Inactive
Total Static 100.00 30 30 0
Collapsed Static 100.00 30 30 0
PI Static 100.00 4 4 0
PO Static 100.00 2 2 0
October 2015 59 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Reporting Faults, Test Objectives, and Statistics
Total Dynamic 100.00 42 42 0
Collapsed Dynamic 100.00 42 42 0
PI Dynamic 100.00 4 4 0
PO Dynamic 100.00 2 2 0
Parametric
There are 2 test mode(s) defined:
FULLSCAN
COMPRESSION
[end TFM_704]
There are no PPIs for Test Mode: COMPRESSION
Information for Test Mode: COMPRESSION
--------------------------
Scan Type = GSD
Reporting Low Power Fault Statistics
Example 3-2 illustrates a portion of sample output using the report_fault_statistics
powercomponent=srpg keyword value to obtain a listing of low power fault statistics for
faults that contain state retention logic.
Example 3-2 Power Component Report from report_fault_statistics
Global Ignored Static Fault Count 1854
Global Ignored Dynamic Fault Count 1833
Coverage Definitions:
#Faults : Number of Active Faults (observable).
#Tested : Number of Active Faults marked tested.
#Possibly: Number of Active Faults marked possibly tested
(good value is 0 or 1; fault value is X).
#Redund : Number of Active Faults untestable due to redundancy.
#Untested: Number of Active Faults untested.
#PTB : Number of Active Faults marked "possibly testable at best."
#TestPTB : Number of "possibly tested at best" faults marked possibly tested
or marked tested by implication.
Depth : (Hier block stats only) Number of hier levels down in the design
a hier block is relative to the first block printed.
%TCov (%Test Coverage) : #Tested / #Faults
%ATCov (%Adjusted TCov) : #Tested / (#Faults-#Redund)
%PCov (%Possibly Detected Coverage) : (#Tested+#Possibly) / #Faults
%APCov (%Adjusted PCov) : (#Tested+#Possibly) / (#Faults-#Redund)
%PTBCov (%Possibly Testable at Best Coverage): (#TestPTB+#Tested) / #Faults
%APTBCov (%Adjusted PTBCov) : (#TestPTB+#Tested) / (#Faults-#Redund)
Experiment Statistics: PM2.atpg
INFO (TLP-603): Getting Power Component instances active in Power Mode PM2. [end
TLP_603]
INFO (TLP-604): Found 30 active instances of Power Component type(s)
srpg in Power Mode PM2. [end TLP_604]
Hierarchical Fault Stats selected: Total Static
October 2015 60 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Reporting Faults, Test Objectives, and Statistics
Depth #Faults #Untested #Tested %TCov HierIndex SimpleName/CellName
0 56 6 42 75.00 1862 \out_reg[0]/SDRFFRX1M
0 56 3 48 85.71 1910 \out_reg[1]/SDRFFRX1M
0 56 3 48 85.71 1958 \out_reg[2]/SDRFFRX1M
0 56 3 48 85.71 2006 \out_reg[3]/SDRFFRX1M
0 56 6 35 62.50 2054 \out_reg[4]/SDRFFRX1M
0 56 6 42 75.00 2105 \out_reg[0]/SDRFFRX1M
0 56 3 48 85.71 2153 \out_reg[1]/SDRFFRX1M
0 56 4 48 85.71 2201 \out_reg[2]/SDRFFRX1M
0 56 4 48 85.71 2249 \out_reg[3]/SDRFFRX1M
0 56 10 35 62.50 2297 \out_reg[4]/SDRFFRX1M
0 56 8 37 66.07 2348 \out_reg[0]/SDRFFRX1M
0 56 3 45 80.36 2396 \out_reg[1]/SDRFFRX1M
0 56 3 45 80.36 2444 \out_reg[2]/SDRFFRX1M
0 56 3 45 80.36 2492 \out_reg[3]/SDRFFRX1M
0 56 6 45 80.36 2540 \out_reg[4]/SDRFFRX1M
0 56 5 45 80.36 2824 \out_reg[0]/SDRFFRX1M
0 56 3 48 85.71 2872 \out_reg[1]/SDRFFRX1M
0 56 3 48 85.71 2920 \out_reg[2]/SDRFFRX1M
0 56 3 48 85.71 2968 \out_reg[3]/SDRFFRX1M
0 56 3 48 85.71 3016 \out_reg[4]/SDRFFRX1M
0 56 6 45 80.36 3067 \out_reg[0]/SDRFFRX1M
0 56 4 48 85.71 3115 \out_reg[1]/SDRFFRX1M
0 56 4 48 85.71 3163 \out_reg[2]/SDRFFRX1M
0 56 4 48 85.71 3211 \out_reg[3]/SDRFFRX1M
0 56 4 48 85.71 3259 \out_reg[4]/SDRFFRX1M
0 54 9 37 68.52 3310 \out_reg[0]/SDRFFRX1M
0 54 3 43 79.63 3358 \out_reg[1]/SDRFFRX1M
0 54 3 43 79.63 3406 \out_reg[2]/SDRFFRX1M
0 54 3 43 79.63 3454 \out_reg[3]/SDRFFRX1M
0 54 3 43 79.63 3502 \out_reg[4]/SDRFFRX1M
#Faults #Tested #Untested %TCov
Total Power Comp Stats 1670 1342 131 80.36
INFO (TDA-001): System Resource Statistics. Maximum Storage used during the run
and Cumulative Time in hours:minutes:seconds:
Working Storage = 10,459,700 bytes
Mapped Files = 249,856 bytes
(Paging) Swap Space = 15,974,588 bytes
CPU Time = 0:00:00.05
Elapsed Time = 0:00:00.10 [end TDA_001]
*******************************************************************************
* Message Summary *
*******************************************************************************
Count Number First Instance of Message Text
------- ------ ------------------------------
INFO Messages...
1 INFO (TDA-001): System Resource Statistics. Maximum Storage used during the run
1 INFO (TLP-602): Reading CPF information from the Encounter Test database.
1 INFO (TLP-603): Getting Power Component instances active in Power Mode PM2.
1 INFO (TLP-604): Found 30 active instances of Power Component type(s) srpg in
Power Mode PM2.
October 2015 61 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Reporting Faults, Test Objectives, and Statistics
*******************************************************************************
Reporting Bridge Fault Statistics
Figure 3-6 shows a sample from the default output for report_fault_statistics when
there are static and dynamic bridge faults in the fault model. The information near the top,
about net adjacency, is included only if the input to build_bridge_faultmodel was an
OpenAccess (OA) database.
Figure 3-6 Bridge Fault Statistics Report
Total Adjacent Net Run Length (microns): 195591.953125
Total (Bridge) Faulted Adjacent Net Run Length (microns): 164683.312500 (84.197388%
of total)
Net Adjacency Parameter: layerminspacing=minimum
Global Ignored Static Fault Count 2
Global Ignored Dynamic Fault Count 2
INFO (TFM-701): Fault Statistics for Global :
-- ATCov -- ------------- Global Faults ----------------------
Global Total Tested Possibly Redundant Untested
Total Static 0.00 69162 0 0 0 69162
Collapsed Static 0.00 51808 0 0 0 51808
PI Static 0.00 110 0 0 0 110
PO Static 0.00 184 0 0 0 184
Total Dynamic 0.00 90840 0 0 0 90840
Collapsed Dynamic 0.00 68610 0 0 0 68610
PI Dynamic 0.00 110 0 0 0 110
PO Dynamic 0.00 184 0 0 0 184
Parametric 0.00 7168 0 0 0 7168
Static Bridge 0.00 63400 0 0 0 63400
Dynamic Bridge 0.00 63400 0 0 0 63400
IDDq 0.00 69162 0 69162
Report Domain Faults
To report a list of faults within clock domain, use the report_domain_faults function. This
function will generate a report that contains the faults that meet the specified criteria. The
faults included are in the domain(s) identified by the clock constraints or test sequences. To
list faults in an individual domain, select one sequence or use a clockconstraints file with the
clock(s) for the single domain. To see the faults in each domain, run the command multiple
times selecting an individual domain each time. The syntax for this function is given below:
report_domain_faults experiment=tg1 testmode=FULLSCAN_TIMED workdir=mywd
faultlocation=net clockconstraints=clk_const
October 2015 62 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Reporting Faults, Test Objectives, and Statistics
Following is a sample output of this function for a domain in a clock constraint file,
clk_const:
INFO (TFM-705): Testmode: FULLSCAN_TIMED Fault List:
Fault List for domains from Clock Constraints File clk_const:
Fault Status Type Sim Func/ Fault pin name
Cell Name
380 T OSF PI Pin.f.l.feq.nl.rx_clk
379 T OSR PI Pin.f.l.feq.nl.rx_clk
428 T OSF PI Pin.f.l.feq.nl.wb_clk
427 T OSR PI Pin.f.l.feq.nl.wb_clk
738 T ISF MUX Pin.f.l.feq.nl.apb_1.comp_done_reg.I1.I0.DATA1
737 T ISR MUX Pin.f.l.feq.nl.apb_1.comp_done_reg.I1.I0.DATA1
736 Unio ISF MUX Pin.f.l.feq.nl.apb_1.comp_done_reg.I1.I0.DATA0
1124629c OSF MUX Pin.f.l.feq.nl.apb_1.i_277092.I0.I0.DOUT
735 Unio ISR MUX Pin.f.l.feq.nl.apb_1.comp_done_reg.I1.I0.DATA0
For a complete description of the report_domain_faults syntax, refer to
report_domain_faults in the Encounter Test: Reference: Commands.
Report Domain Fault Coverage Statistics
To report fault coverage statistics for a clock domain, use the
report_domain_fault_statistics function. This command reports the domain
coverage for the superset of faults in all clocking sequences in the clock constraint file or the
specified test sequence(s). To get separate statistics for multiple domains, run the command
multiple times. The syntax for this function is given below:
report_domain_fault_statistics experiment=printCLKdom testmode=FULLSCAN /
workdir=mywd coveragecredit=tested testsequence= myclkseq
Note: To get a list of domains with the total number of faults in each domain, run
create_logic_tests or create_logic_delay_tests
reportsequencefaults=yes.
Inputs
Encounter Test model from build_model
Test mode from build_testmode
Fault_model from build_faultmodel
Experiment or committed results from ATPG
The following is a sample report for experimental test coverage based on clocking sequences.
October 2015 63 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Reporting Faults, Test Objectives, and Statistics
Experiment Statistics: FULLSCAN.printCLKdom
#Faults #Tested #Possibly #Redund #Untested #PTB #Test %T %AT %P %AP %PTB %APTB
PTB Cov Cov Cov Cov Cov Cov
3152 1107 68 0 1977 0 0 35.12 35.12 37.28 37.28 35.12 35.12
1584 690 47 0 847 0 0 43.56 43.56 46.53 46.53 43.56 43.56
1568 417 21 0 1130 0 0 26.59 26.59 27.93 27.93 26.59 26.59
1730 612 45 0 1073 0 0 35.38 35.38 37.98 37.98 35.38 35.38
928 411 33 0 484 0 0 44.29 44.29 47.84 47.84 44.29 44.29
802 201 12 0 589 0 0 25.06 25.06 26.56 26.56 25.06 25.06
Report Path Faults
To report path faults using the graphical user interface, refer to Report Path Faults in the
Encounter Test: Reference: GUI.
For a complete description of the report_pathfaults syntax, refer to report_pathfaults in
the Encounter Test: Reference: Commands.
The syntax for the report_pathfaults command is given below:
report_pathfaults experiment=<experiment_name> testmode=<testmode_name> /
workdir=<directory> globalscope=no
Sample output for the short and long format (specified using the reportdetails =yes|no
keyword) of the report_pathfaults command output is shown below:
Short form
- - - - - - - - - - - - - - - - - - - - - - - - - - - -
Listing of individual path faults with status and groups
- - - - - - - - - - - - - - - - - - - - - - - - - - - -
There are 16 path faults and 8 path groups in this fault model
faultID: 1 transition: 0->1 size: 4 status: TG Fail Near Robust group: Path_1_01
faultID: 2 transition: 0->1 size: 4 status: TG Fail Near Robust group: Path_1_01
faultID: 3 transition: 1->0 size: 4 status: TG Fail Near Robust group: Path_1_10
faultID: 4 transition: 1->0 size: 4 status: TG Fail Near Robust group: Path_1_10
faultID: 5 transition: 0->1 size: 4 status: TG Fail Near Robust group: Path_2_01
...
...
Path group: Path_4_10 has 1 Path Faults
Path group: Path_4_01 has 1 Path Faults
Path group: Path_3_10 has 2 Path Faults
Path group: Path_3_01 has 2 Path Faults
...
...
Long Form
- - - - - - - - - - - - - - - - - - - - - - - - - - - -
Listing of individual path faults with status and groups
October 2015 64 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Reporting Faults, Test Objectives, and Statistics
- - - - - - - - - - - - - - - - - - - - - - - - - - - -
There are 16 path faults and 8 path groups in this fault model
faultID: 1 transition: 0->1 size: 4 status: TG Fail Near Robust group: Path_1_01
Pin Pin.f.l.TESTCASE1.nl.FF_2.__i0.dff_primitive.Q,
Pin Pin.f.l.TESTCASE1.nl.FF_2.__i4.01,
Pin Pin.f.l.TESTCASE1.nl.FF_3.mux1.DOUT,
Pin Pin.f.l.TESTCASE1.nl.FF_3.__i0.dff_primitive.Q
faultID: 2 transition: 0->1 size: 4 status: TG Fail Near Robust group: Path_1_01
Pin Pin.f.l.TESTCASE1.nl.FF_2.__i0.dff_primitive.Q,
Pin Pin.f.l.TESTCASE1.nl.FF_2.__i4.01,
Pin Pin.f.l.TESTCASE1.nl.FF_3.mux1.DOUT,
Pin Pin.f.l.TESTCASE1.nl.FF_3.__i0.dff_primitive.Q
...
...
...
Path group: Path_4_10 has 1 Path Faults
Path group: Path_4_01 has 1 Path Faults
Path group: Path_3_10 has 2 Path Faults
Path group: Path_3_01 has 2 Path Faults
...
...
...
The fault status can be any of the following:
Tested Hazard Free
TG Fail Near Robust
Not Processed
Test Gen NearRobust
Report Path Fault Coverage Statistics
To report path statistics using the graphical interface, refer to Report Path Fault Statistics in
the Encounter Test: Reference: GUI.
For a complete description of the report_pathfault_statistics syntax, refer to
report_pathfault_statistics in the Encounter Test: Reference: Commands.
The syntax for the report_pathfault_statistics command is given below:
report_pathfault_statistics experiment=<experiment name> /
testmode=<testmode name> workdir=<directory> pathname=<value>
An example of path faults statistics follows:
October 2015 65 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Reporting Faults, Test Objectives, and Statistics
Path Fault Coverage Definitions
#Faults : Number of Path Faults
#Tested : Number of Path Faults marked tested.
#HzFree : Number of Path Faults marked tested and hazard free
#Robust : Number of Path Faults marked tested and robust
#NrRob : Number of Path Faults marked tested and nearly robust (almost
robust)
#NoRob : Number of Path Faults marked tested and Non Robust
#NoTest : Number of Path Faults for which Path Test Generation could not
generate a test
%TCov (%Test Coverage) : #Tested/#Faults
%HFree (%Hazard Free TCov) : #HzFree/#Faults
%Rob (%Robust TCov) : #Robust/#Faults
%NrRob (%Nearly Robust TCov) : #AlRob/#Faults
%NoRob (%Non Robust TCov) : #NoRob/#Faults
%NoTest (%Untesable) : #NoTest/#Faults
Test Mode Statistics for Path Faults
#Faults #Tes #Hz #Rob #NrR #NoR #NoTes %TCov %HFre %Rob %NrRob %NoRob %NoTe
ted Free ust ob ob t e st
Paths 1000 800 200 150 200 250 100 80.0 20.0 15.0 20.0 25.0 10.0
Report Package Test Objectives (Stuck Driver and
Shorted Nets)
Report Package Test Objectives produces information for objectives defined in the
objectiveModel and objectiveStatus files. Stuck driver and shorted net objectives are defined
for I/O wrap and interconnect test purposes. Both of these objectives are based upon target
nets. Stuck driver objectives are defined to check the integrity of the path from a driver to each
of its receivers. Shorted nets objectives are defined to check the integrity of the paths for a
set of target nets.
To report package test objectives, use report_sdtsnt_objectives. Refer to
report_sdtsnt_objectives in Encounter Test: Reference: Commands for more information.
The following information is produced for static and dynamic stuck driver objectives:
For stuck driver objectives:
Objective - Each objective is assigned a unique identifier called the objective index.
Type - Static or Dynamic
Value - The objective value
October 2015 66 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Reporting Faults, Test Objectives, and Statistics
Status - Test status of objective
Intrachip - A yes or no indicator. Intrachip indicates whether the driver and receiver are
on the same chip.
PkgPinNet - A yes or no indicator. PkgPinNet indicates whether the driver or receiver are
associated with a net which has a net which has a primary input, output or bidi pin.
Net - The net which connects the driver and receiver.
Driver - The logic model block identified as the driver.
Receiver - The logic model block identified as the receiver.
The shorted nets objective list includes the number of target nets and the corresponding
number of objectives. Each net is listed in a table showing the logic value required on that net
for a given objective.
Report Package Test Objectives Coverage Statistics
To report package test objectives coverage, use
report_sdtsnt_objective_statistics. Refer to report_sdtsnt_objective_statistics in
Encounter Test: Reference: Commands for more information.
October 2015 67 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Reporting Faults, Test Objectives, and Statistics
October 2015 68 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
4
Analyzing Faults
Fault analysis is an early test generation process that determines if there are untestable static
logic faults in the design. When the early test generation process ends, data about these
untestable faults is provided to you for analysis.
Fault Analysis Process
A simplified view of the early test generation/fault analysis process is shown in the following
figure:
Figure 4-1 Simple AND Block for Fault Analyzer Example
The early test generation process includes the following steps:
Set up the test for a single fault. For the example, assume the test generator is trying to
find a test for the first input of the AND (neta) stuck at one. In order to detect the
difference between the good device and the device with the stuck-at-1 fault, the first step
is to set neta=0.
Next put a non-controlling value on netb to allow the effect of neta to be seen at the
output. Set netb=1.
October 2015 69 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Analyzing Faults
Expect a value of zero on netc when the device is good and a value of one if the defect
represented by the fault on net a occurs. This is represented as 0/1 in net c.
The input values (on neta and netb) must be justified back to the PIs or to flops or latches
whose value can be scanned in.
The output values (on netc) must be propagated forward to the POs or to flops or latches
whose value can be scanned out.
If the values cannot be set up, or cannot be observed, or if conflicting values are required to
do the justification and propagation, then the fault is untestable.
Analyze Deterministic Faults
Use the analyze_deterministic_faults command to analyze untested faults and
identify observe and control test points to test such faults. The command does not identify
test points for any untested faults for the following since test points in this logic could invalidate
the design or testmode and cause failures in verify test structures:
Inactive logic
Outputs of RAMs, ROMs, or non-scan flops
Clock paths, scan paths, tied logic paths, Test Inhibit/Test Constraint paths, or the outputs
of RAMs, ROMs and non-scan latches
The total number of test points that the command identifies is determined by the number of
untested faults in the design and the ability to combine as many test points as possible and
still retain the ability to test the faults. In many cases, a test point might provide testability for
only a single fault. In these cases, a high test coverage requires a large number of test points.
For example, if there are over 100K untested faults in a design, more than 20K test points
might be required to achieve a test coverage of 99.9% or higher. The
analyze_deterministic_faults command identifies how many faults should be tested
with each identified test point, thus allowing you to use only those test points that test large
number of faults.
The following is a sample usage of the analyze_deterministic_faults command:
analyze_deterministic_faults workdir=workdir inexperiment=experiment_name
testmode=testmode
The previous command creates all possible test points for the experiment. Refer to
analyze_deterministic_faults in Encounter Test: Reference: Commands for more
information.
October 2015 70 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Analyzing Faults
Input Files
Encounter Test Model from build_model
Testmode from build_testmode
Fault model from build_faultmodel
Experiment from previous test generation run. This provides the starting point for
coverage for untested faults.
tgfaultlist file (optional) containing a list of faults on which
analyze_deterministic_faults is to work. This allows you to target specific
pieces of the design.
notpfile
A file containing locations where testpoints should not be inserted. Locations may be
specified with one of the following statements:
block <instance_names> ;
cell <cell_names> ;
net <net_names> ;
pin <pin_names> ;
where:
instance_names: list of names of hierarchical instances in the design. Testpoints
will not be placed on any pin on the boundary of the instances, nor anywhere inside
the instances.
cell_names: list of names of cells in the design (may be technology cells, macros,
or any level of hierarchy.) Testpoints will not be placed on (or inside) any instance
of these cells.
net_names: list of names of hierarchical nets in the design. Testpoints will not be
placed on these nets, or on any net segments that are electrically common to these
nets.
pin_names: list of names of hierarchical pins in the design. Testpoints will not be
placed on these pins.
Note:
Names containing special characters (characters other than A-Z,a-z,0-9 and .)
should be specified within quotation marks.
The keywords block, cell, net, and pin are case insensitive.
October 2015 71 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Analyzing Faults
Outputs
TestPointInsertion.<testmode name>.dfa in the testresults directory. If a
testresults directory does not exist then the command places the output file in the
workdir. The output file lists the test points in weighted format, starting with the test points
that test the highest number of faults. If an observe and control test point each test the same
number of faults, then the observe test point will be listed first.
A sample of the file is given below:
entity XYZ is
attribute INTERNAL_TEST_POINT_LIST of XYZ: constant is
"\NB/NBBST/UU_BistPauseCnt_bp0_1_X9 [pin:Z] [type:O] [faults:9]," &
"\NB/NBBST/UU_BistPauseCnt_bp0_1_X11 [pin:Z] [type:O] [faults:8]," &
"\NB/XBPML/UU_NBXBR_PerfMonXbar_2_1 [pin:Y] [type:C0] [faults:7]," &
"\NB/XBPML/UU_NBXBR_PerfMonXbar_3_1 [pin:Z] [type:O] [faults:6]," &
"\NB/NBBST/UU_BistPauseCnt_bp0_1_X8 [pin:Z] [type:O] [faults:6]," &
"\NB/NBBST/UU_BistPauseCnt_bp0_1_X10 [pin:Y] [type:C1] [faults:6]," &
"\NB/XBL2S/Ldt2ToXbarBuf/UU_invCrcError_bit1 [pin:Z] [type:O] [faults:6]," &
"\NB/XBL1D/XbarToLdt1Buf/UU_tPktCnt_n2_bit2 [pin:Z] [type:O] [faults:1]," &
"\NB/NBBST/UU_BistCamState_bp0_int3_1 [pin:Z] [type:O] [faults:1]," &
"\NB/XBL1S/Ldt1ToXbarBuf/UU_LdtToXbarr_xp0/UU_Z0 [pin:Z] [type:O] [faults:1]";
end XYZ;
In the output:
The first entry, for example \NB/NBBST/UU_BistPauseCnt_bp0_1_X9 in the given output, is
the block name
The second entry, for example [pin:Z] in the given output, is the pin name
The third entry, for example [type:O] in the given output, is the type of test point. The
following types of test points are available:
[type:O] - observe test point
[type:C0] - control to 0 test point
[type:C1] - control to 1 test point
[type:CB] - control both test point
The last entry, for example [faults:9] in the given output, depicts the number of faults
tested
You can edit this file to remove any test points. However, you must ensure that the last line
ends with ;.
If you specify traceinactive=yes, the command creates an additional file named
InactiveFaults.<testmode name> in the testresults or workdir directory. A
sample is given below:
October 2015 72 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Analyzing Faults
Inactive fault analysis summary
-------------------------------
pin BS1 creates 34 inactive fault(s)
2140 2133 2123 2072 2065 2055 1870 1863 1853 1802 1795 1785 1600 1593 1583 1532
1525 1515 1330 1323
1313 1262 1255 1245 1127 1114 1104 1041 1028 1018 128 118 108 9
pin DI1 creates 42 inactive fault(s)
2211 2210 2209 2208 2193 2192 2189 2186 1949 1948 1947 1946 1931 1930 1927 1924
1917 1916 1679 1678
1677 1676 1661 1660 1657 1654 1647 1646 1409 1408 1407 1406 1391 1390 1387 1384
1377 1376 967 966
30 29
pin RI creates 29 inactive fault(s)
2207 2206 2199 2099 1945 1944 1937 1920 1829 1675 1674 1667 1650 1559 1405 1404
1397 1380 1289 970
191 190 181 180 163 162 148 147 49
pin BS2 creates 12 inactive fault(s)
2109 2096 2086 1839 1826 1816 1569 1556 1546 1299 1286 1276
In the output:
Each line starting with pin <pinname> is a cause of the specified number of inactive
faults.
The line(s) under each pin entry lists the fault indexes of the faults that are inactive
because of that pin.
Sample Methodology for Large Parts
For large designs that typically contain thousands of untested faults, it is recommended that
you use the following methodology to analyze untested faults:
1. Run report_fault_statistics, as shown below, to identify areas in the design that
have low coverage:
report_fault_statistics workdir=workdir testmode=testmode
experiment=exp_name hierlevel=macro colsuntested=yes globalscope=no
2. Create a fault list from the identified areas of the design by running report_faults, as
shown below:
report_faults workdir=workdir testmode=testmode experiment=exp_name
reporthierarchical=yes globalscope=no statuspossibly=no statusincomplete=yes
statusaborted=yes statusuntestable=yes typedrvrcvr=no inputcommitted=no
hierrange=range
The hierrange keyword is the list of hierblock indexes for which you want the untested
faults.
October 2015 73 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Analyzing Faults
3. Feed this list of faults to the analyze_deterministic_faults command by
specifying the tgfaultlist keyword, as shown below.
analyze_deterministic_faults workdir=workdir testmode=testmode
inexperiment=exp_name tgfaultlist=fault_list
A disadvantage of this methodology is that it does not target the complete design but only
specific areas in the design, therefore, resulting in limited test coverage.
Analyze Faults
The analyze_faults command is basically the beginning of the create_logic_tests
process; analyze_faults does not produce vectors, it only produces TFA messages to
report testability problems. You also can create TFA messages by running
create_logic_tests. The messages do not print to the create_logic_tests log but
you can view them with GUI message analysis.
To perform Analyze Faults using the graphical interface, refer to Analyze Faults in the
Encounter Test: Reference: GUI.
To perform Analyze Faults using command lines, refer to analyze_faults in the Encounter
Test: Reference: Commands.
Restrictions
Encounter Test applies the following restrictions on deterministic fault analysis:
Deterministic Fault Analysis processes only static (stuck-at or pattern) faults.
Specific analysis capability is not provided for:
Driver and receiver faults
Testability of faults by IDDq tests.
Fault Analysis is generally incapable of resolving all untestable faults in the presence of
non-scannable memory elements. Faults that require multiple-time frames to be proven
untestable are classified as incomplete.
Limitations of the interactive analysis of Deterministic Fault Analysis messages:
Analysis of aborted faults is limited. During analysis of an aborted fault, only the
associated fault block is displayed.
Only a single set of fault analysis data can exist at any point in time.
October 2015 74 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Analyzing Faults
Input Files
Encounter Test Model from build_model
Testmode from build_testmode
Fault model from build_faultmodel
Output
Fault status information
TFA messages in the log that indicate testability problems. These messages can be
analyzed interactively with GUI message analysis.
Analyzing TFA Messages from Create Logic Tests or
Analyze Faults
1. Select the Messages Tab and click the View Messages icon; or Window - Messages
- Analyze Faults. The Analyze Faults Message Summary list is displayed.
2. Select a message number, then select View. The Analyze FaultsSpecific Message
List is displayed. There are three messages generated. The reason is included as the
last sentence in the text of the message.
TFA-001 - Untestable faults
TFA-020 - Redundant faults
TFA-030 - Aborted faults
See Specific Message List Window in the Encounter Test: Reference: GUI for
more information.
Select a specific fault to analyze by selecting a specific message and then Analyze.
3. Analyze the message using Actions on the View Schematic Window. Refer to
Encounter Test: Reference: GUI for details.
When you analyze a TFA message, an informational message dialog pops up along with
the display of the logic containing the fault and any additional logic that was found to
contribute to the controlability or observability problem.
The message dialog provides additional information about the cause of the testability
issue and/or recommends a test point that would improve the testability of that fault.
October 2015 75 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Analyzing Faults
Refer to Message Analysis Windows in the Encounter Test: Reference: GUI for
additional information.
GUI Schematic Fault Analysis
You can use Analyze Faults on a fault in the Graphical User Interface Schematic to use fault
analysis on specific faults. This allows you to graphically view testability problems in the
design.
Note: Analyze Fault on the GUI provides an optimistic analysis of the fault; ATPG includes
additional processes that may prove a fault untestable that the GUI reports as testable.
Analyze Fault uses a dual-machine nomenclature to represent the good machine and fault
machine values associated with each entity. These values are displayed on the design and in
the Information Window.
The net values displayed by Deterministic Fault Analysis are expressed in terms of good and
fault machine logic value pairs. The first value is for the good machine and the second value
is for the fault machine (design behavior in the presence of a given fault). For example, a 1/0
represents a design value of one for the good machine, and a design value of zero in the
presence of the fault. The logic values of entities (blocks, pins, or nets) unaffected by a
particular fault are normally expressed as V/V, where V can be any of the valid logic values.
Deterministic Testability Measurements for Sequential
Test
Deterministic Testability Analysis (Testability Measurements) provides four design
testability analysis functions.
The first function provides potentially-attainable logic values (LV) at output pins of each
block, by means of Possible Value Set (PVS) simulation. See Possible Value Set (PVS)
Concepts on page 78 for details.
The second function provides deterministic controllability/observability measures at
output pins of each primitive block.
The third function provides sequentiality analysis at input and output pins of each
primitive block
The fourth function provides latch tracing information.
These deterministic testability analysis (TTA) functions are performed for the good design and
at the test mode level.
October 2015 76 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Analyzing Faults
Deterministic Testability Analysis prints out results on output pins based on pin types being
selected. If selected, one results table and one stats table are printed for each of the two
analysis functions. The stats tables provide summary of the analysis. The results tables
provide the analysis results for each output pins of selected types.
The analysis data can be included in the GUI Schematic Window by selecting corresponding
Information Window Display options. Note that these options are not retained because of the
long run time associated with these tasks. It is therefore recommended that the options be
used only when analyzing small sections of sequential logic.
Notes:
To perform Deterministic Testability Analysis, refer to
report_testability_measurements in the Encounter Test: Reference: Commands
To perform Latch Tracing Analysis using command lines, refer to
report_sequential_trace in the Encounter Test: Reference: Commands
Performing Deterministic Testability Analysis
To perform Deterministic Testability Analysis, refer to report_testability_measurements in
the Encounter Test: Reference: Commands.
Input Files
Encounter Test Model from build_model
Testmode from build_testmode
Fault model from build_faultmodel
Output
Testability information in the log
Note: A blank entry in the controlability column indicates that the net is two-state instead of
three-state.
October 2015 77 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Analyzing Faults
Possible Value Set (PVS) Concepts
While the Encounter Test Logic Values (LV) technique describes signal simulation responses
in a logic network and for a given instance, PVS is a logic algebra identifying potentially-
attainable logic values at a pin at and beyond a given time instance. These two techniques
complement each other, and together, they form the complete (static) logic value system of
Encounter Test.
Information about attainable logic signal values is the basis of Deterministic Testability
Analysis. To be consistent with the logic scope defined by Encounter Test Logic Values, PVS
uses the five fully-specified logic values (0, 1, Z, L, H) in its base set. These five fully-specified
logic values are 0, 1, Z, L, H. PVS consists of the 32 unique subsets of these five fully-
specified logic values.
For two-state, three-state, and weak signals, the initial PVS values are {0, 1 }, {0, 1, Z }, and
{Z, L, H }, respectively, while for PFET and NFET, their initial PVS values include all five fully-
specified logic values, {0, 1, Z, L, H }. After TTA calculations, the signal's PVS may result in
smaller sets than their initial PVS sets.
For example, for an AND with an X-source at one of its inputs, its output PVS would be {0 }.
Similarly, the PVS at the output of a three-state driver is {Z } if its enable signal's PVS is {0 }.
Deterministic Controllability/Observability (CO) Measure Concepts
CO analysis is a measure combining the number of primary inputs (PI's) and the
(compounded) logic depth needed in setting a signal value. For controlling logic values of
primitives, the controllability of the controlling values at the outputs are the minimum
controllability of the controlling values at the inputs plus 1 (for the added logic depth going
from an input to the output of a primitive logic function). For non-controlling logic values, the
controllability of the non-controlling values at the outputs are the sum of the controllabilities
of the non-controlling values at the inputs plus 1.
For example, with a 2-input AND gate, its 0-controllability measure is 1 plus the smaller 0-
controllability of its two inputs; its 1-controllability measure is 1 plus the sum of the 1-
controllabilities of its two inputs. Initially, 0-controllability and 1-controllability for all PI's are set
to 1 and for all internal signals set to the largest integer supported by the software. During
TTA calculations, all internal signals converge to smaller numbers. If a signal's controllability
measure remains at the maximum integer, it indicates that it is impossible to control this signal
to the respective logic value, which may cause difficulties in test generation. A surprisingly
large controllability measure, though less than the maximum integer may also indicate
potential testability problems.
October 2015 78 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Analyzing Faults
Similar to controllability measures, the observability measure combines the number of PI's
and the (compounded) logic depth needed to observe a signal through primary outputs
(PO's). Initially, observability measures would assume an integer 1 for all PO's and the
maximum integer for all internal signals. During TTA's observability calculations, all
observability internal signals would converge to integer numbers between 1 and the
maximum integer. A maximum integer or a surprisingly large observability measure would
indicate it impossible or very difficult to observe the signal at PO's.
CO analysis imposes a SCAN penalty on Scan controllable/measurable signals, to
distinguish these Scan controllable/measurable signals from PI's and PO's for cost
considerations. The default Scan penalty is set to 2. A feedback penalty of 10000 is also
imposed on signals in feedback loops. Non-scan latches and memories would also be
penalized by 10000 to distinguish them from combinational and Scan logics. CO calculation
penalties allow user overrides.
Sequential Depth Measure Concepts
Similar to controllability/observability measures, sequential depth analysis measures the
sequential elements to go through in order to control/observe a node. Currently, this analysis
computes six sequential depth measures for each node. These six measures are: minimum
and maximum sequential depth from Topological Control Points (TCP), minimum and
maximum sequential depth from Topological Measure Points (TMP), minimum sequential
depth for setting a logic ZERO and ONE to a node.
TCP analysis starts by setting sequential depth of 0 to primary inputs, tied nodes, lineholds,
TI's, fixed value latches and test constraint latches. For the rest of the nodes, the minimum
and maximum TCP measures are calculated as the minimum and maximum TCP measures
among the inputs of a node, except for non-controllable latches and memory for which a 1 is
added to the output nodes. Controllable latches are considered as directly controllable so
their minimum and maximum TCP measures are the same as primary inputs.
Minimum and maximum TMP measures are calculated in a similar way as TCP measures,
except it starts by setting sequential depth of 0 to primary outputs and that measurable
latches are considered as if they were primary outputs.
The minimum sequential depth of setting a logic ZERO and ONE combines the above
concepts of deterministic controllability and minimum TCP measures.
Latch Tracing Analysis Concepts
Contrary to the deterministic controllability/observability measures and sequential depth
measures which would start processing from inputs to outputs or from outputs to inputs, latch
October 2015 79 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Analyzing Faults
tracing starts with a node and traces to both inputs and outputs. Latches are separated into
the input and output cones of the focal node and are sorted according to the relative levels to
the node.
Random Resistant Fault Analysis (RRFA)
Analyze Random Resistance identifies sections of a design that are resistant to testing by flat,
uniformly distributed random patterns and provides analysis information to help improve the
random pattern testability of the design. This analysis information is based on signal
probabilities computed by simulating random patterns and counting the number of times each
net takes on the values 0, 1, X and Z. Analyze Random Resistance then uses the faults that
were not tested by the random pattern simulation to determine points in the design that tend
to block fault activation and propagation to observable points.
The analysis information provided by Analyze Random Resistance falls into four key areas:
Testpoint Insertion
Note: The primary use of the information provided by Analyze Random Resistance is for
testpoint insertion, which is dicusssed in this section.
Analyze Random Resistance
To perform Analyze Random Resistance using the graphical interface, refer to Analyze
Random Resistance in the Encounter Test: Reference: GUI.
To perform Analyze Random Resistance using command lines, refer to
analyze_random_resistance in the Encounter Test: Reference: Commands.
Input Files
Encounter Test Model from build_model
Testmode from build_testmode
Fault model from build_faultmodel
User Input (Optional)
Linehold
October 2015 80 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Analyzing Faults
This user-created file is an optional input to test generation. It specifies design PIs,
latches, and nets to be held to specific values for each test that is generated. See
Linehold File in Encounter Test: Guide 5: ATPG for more information.
Test Sequence
This points to user specified clock sequences that have been read in using
read_sequence_definitions. The test sequence is required if you are processing
an LBIST testmode.
See Coding Test Sequences in Encounter Test: Guide 5: ATPG for an explanation
of how to manually create test (clock) sequences.
Probability input file
A file where controllabilities of inputs and observabilities of outputs are specified for
Analyze Random Resistance to use as starting values. The file is specified using the
analyze_random_resistance keyword probabilityfile.
notpfile
A file containing locations where testpoints should not be inserted. Locations may be
specified with one of the following statements:
block <instance_names> ;
cell <cell_names> ;
net <net_names> ;
pin <pin_names> ;
where:
instance_names: list of names of hierarchical instances in the design. Testpoints
will not be placed on any pin on the boundary of the instances, nor anywhere inside
the instances.
cell_names: list of names of cells in the design (may be technology cells, macros,
or any level of hierarchy.) Testpoints will not be placed on (or inside) any instance
of these cells.
net_names: list of names of hierarchical nets in the design. Testpoints will not be
placed on these nets, or on any net segments that are electrically common to these
nets.
pin_names: list of names of hierarchical pins in the design. Testpoints will not be
placed on these pins.
Note:
October 2015 81 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Analyzing Faults
Names containing special characters (characters other than A-Z,a-z,0-9 and .)
should be specified within quotation marks.
The keywords block, cell, net, and pin are case insensitive.
Output
Fault status information
Analyze Random Resistance experiments cannot be committed because no vectors are
produced.
TRA (Analyze Random Resistance) messages which can be analyzed with GUI
Message Analysis.
Signal Probability information
TestPointInsertion.testmode.experiment a file in testresults (or in the workdir if
testresults does not exist). It contains the list of recommended test points in a format that
can be used for inserting into the Encounter Test Model or in DFT Synthesis. For
additional information, refer to Testpoint Insertion.
Test Points
This section discusses the following topics:
Recommendations
Insertion
Recommendations
In some cases, the random testability of a design may be increased by connecting a net to a
scannable latch or primary output, thus improving the observability of the net. Analyze
Random Resistance recommends places in the design where these Observe Points should
be added.
Figure 4-2 shows how an observe point is added in the design.
October 2015 82 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Analyzing Faults
Figure 4-2 An Observe Test Point
In other cases, the random testability may be increased by adding an OR gate or an AND gate
to a particular net with the other input connected to a scannable latch or primary input.
Analyze Random Resistance recommends places in the design where these Control-1 and
Control-0 test points should be added.
Figure 4-3 shows how a control-1 test point is added in the design.
For control-0, the dashed OR in the figure would be AND.
Figure 4-3 Control-1 Test Point
October 2015 83 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Analyzing Faults
In addition to graphical message analysis showing the recommended location for test points,
Analyze Random Resistance creates a TestPointInsertion file containing test point
recommendations written in TSDL format. This file may be modified if desired and used as
input to RC-DFT Synthesis to insert test points automatically into the design.
This file may also be specified on the GUI Schematic Edit pull-down or with the
edit_model command to add the test points to the Encounter Test model strictly for
experimentation purposes. In this case, the test points are modeled using primary inputs and
primary outputs rather than scannable latches.
Refer to the following for additional information:
Testpoint Insertion on page 84
Edit Test Points in the Encounter Test: Reference: GUI
Testpoint Insertion
The following figure shows a typical processing flow for Test Point Insertion.
October 2015 84 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Analyzing Faults
Figure 4-4 Test Point Insertion Flow
Build a New Model
No Scan Yes
Inserted?
Build Test Mode with-
Assumed Scan Build Test Mode
Build Fault Model
Analyze Random Resistance to Identify Test Points
Insert Test Points into the Encounter Test model
Analyze Random Resistance to Assess
Effectiveness of the Inserted Test Points.
Testability
results No
satisfactory?
Yes
Insert Test Points in the design source
with DFT Synthesis
October 2015 85 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Analyzing Faults
1. Build a New Model
Run your normal build_model command to build an Encounter Test model. There are
no unique requirements for building the model for this flow.
For complete information on Build Model, refer to Performing Build Model in the
Encounter Test: Guide 1: Models.
2. Build Test Mode
Run build_testmode to build the testmode. The results of Random Resistant Fault
Analysis will be more accurate if you use a testmode that configures the scanchains as
they will be when the design is tested.
However, if the test structures have not been inserted in the design (i.e. the latches are
not scannable), you can use the Assumed Scan feature to simulate the latches as
scannable. This feature can be used to identify specific latches to assume as scannable
(for a partial scan implementation) or will assume all latches to be scannable.
For complete information, refer to:
Performing Build Test Mode in the Encounter Test: Guide 2: Testmodes.
Assumed Scan in the Encounter Test: Guide 2: Testmodes.
Build Test Mode in the Encounter Test: Reference: GUI.
3. Build Fault Model
Run build_faultmodel to build a fault model. As Random Resistant Fault Analysis
analyzes only static faults, the fault model does not need to include any other faults.
However, you can have other types; RRFA will ignore all except the static faults.
Refer to Build Fault Model for more information.
4. Analyze Random Resistance to Identify Test Points
Run analyze_random_resistance tpi=yes (default) to identify the test points to
improve testability.
Ensure you enter the experiment name for the output.
Refer to Analyze Random Resistance on page 80 for additional details.
5. Insert Test Points into the Encounter Test model
Command line: use the following command to insert the testpoints into the Encounter
Test model
edit_model tsdlfile=testresults/TestPointInsertion.testmode.experiment
October 2015 86 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Analyzing Faults
You can edit the test point insertion file prior to using it as input to edit model.
GUI: Use the following scenario to insert test points into the Encounter Test model:
a. Bring up the Encounter Test GUI and set the Analysis Context to select the testmode
and experiment used for analyze_random_resistance. The easiest way to do
this is to select the analyze_random_resistance task from the Task View.
b. Select View Schematic to bring up the schematic display. There is no need to
display any logic on the schematic, but you may display anything you like.
c. Select Edit then select Test Points.
d. In the Edit Test Points window, select the File button next to File Name and
navigate to the TestPointInsertion file containing the testpoints from RRFA (that is,
TPI file). Select that file and click OK.
e. Specify the number of desired test points from the TPI file (you may include All or a
specified number of top test points). Note there is also an additional selection on this
window to add a specific type of testmode on a specific pin; you can ignore that for
this scenario. When you have the desired list, click OK at the bottom of the window.
f. Click the Apply button next to the File button and you will see the top of the window
is populated with the details of the test point information. You can edit the list by
selecting and using the right mouse button.
g. Click OK at the bottom of the window. The edits will be included in the Edits
Pending window and the hierarchical model in memory will be updated to reflect the
changes.
Note: The actual design does not change at this point. Step i actually modifies the
design.
h. You may trace through the design to view what has been done. If you want to add a
test point at a specific pin you may select that pin on the design view and use the
right mouse button to edit test points. A small test point edit window will allow you to
select the type(s) of test points you want to add at that point. These will also be
added to the Edits Pending window.
i. When you have all the desired edits , select Edits Complete, Reinitialize on the
Edits Pending window. The hierarchical model will be written to disk and the flat
model, test mode, and fault model will be recreated.
6. Analyze Random Resistance to Assess Effectiveness of the Inserted Test Points.
Run analyze_random_resistance again and see the test coverage information. If
you inserted test points with the GUI, the easiest way to do this is to go back to the
October 2015 87 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Analyzing Faults
analyze_random_resistance task on the Task View to bring up the Form that is set
up the way you ran it the last time. Use a different experiment name if you do not want to
change the TestPointInsertion file.
If the results are not satisfactory, you can insert additional test points.
7. Insert Test Points in the design source with DFT Synthesis
Bring up RC-DFT Synthesis and use the command:
insert_dft rrfa_test_points -input_tp_file ./testresults/
TRAtestPointInsertionData.testmode.experiment
To select less than all test points in the file, use -max_number_of_testpoints
integer.
Refer to Using Encounter Test to Automatically Select and Insert Test Points in Design
For Test in Encounter RTL Compiler Guide for more information.
October 2015 88 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
5
Deleting Fault Model Data
This chapter covers the Encounter Test tasks for deleting fault model, fault status and test
objectives data.
Delete Fault Model
This action removes all the faultModel and faultStatus files and all dependencies on these
files for the specified fault model. This enables you to build multiple test modes in parallel
without contention.
Note: Deleting the fault model does not affect test mode data and does not require any
rebuilding of test modes.
To delete a fault model using the graphical interface, refer to Delete Fault Model in the
Encounter Test: Reference: GUI.
To delete a fault model using command line, refer to delete_faultmodel in the Encounter
Test: Reference: Commands.
An example of the delete_faultmodel command is given below:
delete_faultmodel workdir=/local/dlx sdtsnt=<yes|no>
If the command does not find the faultModel file to delete, it continues to remove files that are
dependent on these files and registration records under the assumption that the file has been
manually deleted. This provides a way of removing registration records and dependency
records from globalData even if the files do not exist.
Delete Fault Status for All Existing Test Modes
Use command build_faultmodel overwrite=no to rebuild the fault status information
for the design without rebuilding the fault model. This effectively resets the status for all faults
in all testmodes and invalidates any existing fault oriented test data.
October 2015 89 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Deleting Fault Model Data
Delete Committed Fault Status for a Test Mode
Use command delete_committed_tests to delete all the committed data for a testmode
and reset the fault status back to its initial state from build_faultmodel.
Delete Alternate Fault Model
Use the delete_alternate_faultmodel command to delete a faultmodel built using
build_alternate_faultmodel. The alternate fault model to be deleted is identified with
the ALTFAULT keyword.
Delete Package Test Objectives
Use the delete_sdtsnt_objectives command to delete the objective model and status
built using build_sdtsnt_objectives.
The objective model and status can also be deleted using delete_faultmodel sdtsnt=yes. This
will delete both the fault model and the objective model.
Note: The alternate fault model named ##TB_SDT that is built along with the objective model
is not deleted through either of the above mentioned commands. Use
delete_alternate_faultmodel altfault=##TB_SDT to delete this model.
Delete Fault Model Analysis Data
Use the delete_fautmodel_analysis_data command to delete the register array and
random resistant analysis data built using prepare_faultmodel_analysis or
build_faultmodel registerarray=yes and randomresistant=yes. Refer to
Building Register Array and Random Resistant Fault List Files for Pattern Compaction for
more information.
October 2015 90 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
6
Concepts
To generate tests for a design the first thing that must be done is identify the behaviors that
require testing and the targets of those tests. In the digital logic test industry, the most
common targets for testing are called stuck-at and transition faults. In Encounter Test we refer
to static and dynamic faults. Static faults, such as stuck-at faults, affect the behavior of the
design without regard to timing. Dynamic faults, also called transition or delay faults, affect
the time-dependent behavior of the design. Since these static and dynamic faults are the logic
model equivalent of physical defects, you will sometimes see these referenced as logic faults.
Other faults or objectives are identified for special testing purposes such as ensuring that a
driver in the physical design is working prior to applying tests to the entire design.
Encounter Test supports several different fault types and other test objectives. These faults
are analyzed and some of them are classified with fault attributes that allow test generation
and fault simulation to know that they cannot be tested so they will not be selected for
processing. Once the faults are included in a fault model, the ones that are selected for
processing may be used in test generation or fault simulation processes which mark them
with a fault status; or they may be used in a diagnostics process to identify a failing location
on the physical device.
Fault Types
The following sections describe the types of faults created by Encounter Test.
Static (Stuck-at)
Static Pin Faults
A static pin fault is stuck-at logic zero or logic one. This can be on any pin in the model. By
default Encounter Test generates the following static pin faults:
Inputs of standard primitives stuck-at non-controlling
Inputs of other primitives stuck-at both zero and one
October 2015 91 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
Outputs of primitives stuck-at both zero and one
A stuck-at fault assumes a logic gate input or output is fixed to either a logic 0 or 1.
Figure 6-1 shows an AND gate with input A Stuck-At-1 (S-A-1).
Figure 6-1 S-A-1 AND gate
The faulty AND gate perceives the A input as a logic 1 value regardless of the logic value
placed on the input. The pattern applied to the fault-free AND gate has an output value of 0.
The pattern applied to the faulty AND gate has an output value of 1.
The pattern shown in Figure 6-1 is a valid test of the input A S-A-1 because there is a
difference between the faulty gate (fault machine) and the good gate (good machine). When
this condition occurs, this set of input patterns detects the fault. If they had responded with
the same output value, the pattern applied would not have constituted a test for that fault (S-
A-1).
A good machine has no faults and a fault machine has one, and only one, of the stuck faults
(S-A-1 or S-A-0). In other words, multiple faults are not considered in Encounter Test.
October 2015 92 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
Static Pattern Faults
A pattern fault is defined by a pattern specified on a set of inputs and the resulting good
machine and fault machine values to expect on the outputs in order to detect the fault.
Encounter Test automatically generates pattern faults for the following primitive logic
functions:
XOR (exclusive OR - ODD)
XORN (exclusive OR - EVEN)
TSD (Three-State Driver)
LATCH (Latch Primitive)
MUX (MUXes)
__DFF (Flip-Flops)
Pattern faults ensure that virtually all possible defects associated with these logic functions
can be effectively modeled. For example, a two-input XOR gate generates four static pattern
faults, which represent all four possible input value combinations (00, 01, 10, 11),
guaranteeing that all potential static defects will be covered.
Externally defined pattern faults may be specified in addition to those automatically generated
by Encounter Test. This is done by creating fault rules and placing them in a file which is
referenced by the Cell Library or netlist. If the filename is the same as the name of the cell to
which it applies, it does not have to be referenced in the design source. An option during Build
Fault Model will automatically look for fault rules that are named the same as the cells. See
Build Fault Model Examples with Fault Rule Files for more information.
The purpose for pattern faults on MUXes is to guarantee that adequate tests have been
applied to test the defects that can occur on these designs. S-A-1 or S-A-0 faults on the I/O
pins of a mux would not force these robust test patterns. MUXes are generally constructed
from transistor-level designs that can exhibit Z or Contention states when faulty. Static pattern
faults for a MUX require each input to be selected and observed at both a 1 and 0 while all
other data inputs are at the opposite state.
__MUX2 primitive static pattern faults are also implemented in Encounter Test.
Additional static pattern faults may be provided by the technology supplier or designer in a
fault rule.
October 2015 93 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
Automatically Generated Static Pattern Faults
The automatically generated static pattern faults are detailed in Figure 6-2 on page 95
through Figure 6-5 on page 97.
The values in these figures are shown as (good machine)/(fault machine) requirements,
except where both machine requirements are the same, in which case a single value is
shown. For cases where the value does not matter, a dash (-) is shown, although the fault
model will represent these with an unknown (x) value. A good machine required value of (-)
(don't care) is only of significance for sequential designs where the fault's effect could feed
back to the required value node. Until the fault has been excited, the faulty design value for
any node is assumed to be the same as the good design value for that node.
Test generators will usually attempt to meet all good design required values to excite the fault,
except in the one case where the good design value is a don't care, in which case the test
generator attempts to obtain the value required for the faulty design.
Fault simulators will always be checking the faulty design values against the required faulty
design values for fault excitation. Until a fault's effect has propagated to a node, the faulty
design value for that node is the same as the good design value. You may notice that for the
automatically generated pattern faults, the faulty design "don't care" values are on nodes
where even if the faulty design value was opposite the good design required value, the output
pin value for the faulty design would still match the faulty design's behavior - thus making it
redundant to require the faulty design to be at the value needed to excite the defect.
Automatic Static Pattern Faults for XOR/XNOR
In Figure 6-2 on page 95, a two-input XOR or XNOR gate has four static pattern faults
automatically generated for it.
There are output pin stuck-at faults automatically defined for an XOR gate in addition to the
automatically generated pattern faults.
October 2015 94 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
Figure 6-2 XOR Static Pattern Faults Automatically Generated by Encounter Test
All possible input patterns are considered, yielding 2**n patterns faults for an n-input XOR.
Encounter Test allows an XOR primitive to have up to 256 inputs. Output values are shown
as good value/faulty value. XNOR pattern faults have the opposite output values.
Automatic Static Pattern Faults for TSD
The following figure shows the static faults automatically generated for a TSD primitive. The
six static faults cover four input pin defects: data stuck zero or one and enable stuck zero or
one; they also cover four defects "inside" the driver which affect the behavior of the driver only
when a specific data value is present. These internal defects are associated with transistors
which are used to pull the output net to zero or one.
Figure 6-3 TSD Static Pattern Faults Automatically Generated by Encounter Test
Enable stuck-ON is modeled by two pattern faults with the enable OFF and data input 0 and
1 respectively. If either of these pattern faults is detected, the enable stuck-ON defect is
October 2015 95 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
detected. However, these two faults also model defects on separate transistors for pulling the
output net to ground or Vdd respectively, and so are tracked independently. Enable stuck-OFF
is modeled by two pattern faults with the enable ON and data input at 0 and 1 respectively. If
either of these pattern faults is detected, the enable stuck-OFF defect is detected. However,
these two faults also model defects on separate transistors for pulling the output net to ground
or Vdd respectively, and so are tracked independently. Stuck data input or output faults are
modeled with pattern faults requiring the enable to be ON and one pattern fault requires a
data value of zero while the other requires a data value of one.
Automatic Static Pattern Faults for Latch Primitives
For Latch primitives, Encounter Test automatically generates a set of pattern faults for each
port of the latch. The static faults are shown in the following figure, which is for a two-port
latch. There are static pattern faults to model defects on the input pins of the port, as well as
internal latch feed-back loop defects. The pattern faults for one port of a multi-port latch
always include requirements that the clock inputs to the other ports be off. Note that for a
single port latch, the requirement to initialize the latch is removed for clock-stuck-off pattern
fault modeling.
Figure 6-4 Latch Static Pattern Faults Automatically Generated by Encounter Test
There are eight static faults generated per port to essentially cover the eight possible values
for clock, data and current state; except that when the clock input is ON, it is not always
October 2015 96 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
required to have a known previous state for the latch. Normally the faulty design would
assume the latch content stays at unknown (X) when the clock is stuck OFF. However, by
modeling the clock-stuck-off defect with two pattern faults which require writing different data
value through the latch, when both of these pattern faults have been detected, the clock-
stuck-off defect is guaranteed detected since we would have verified that both a logic one and
a logic zero were written through the latch.
In Figure 6-4, the * denotes that Single port latches have a modified required values list for
clock SA0 faults. The values in parenthesis () on the output pin 0 are not included in the
required values list for single port latches. The parenthetic "don't care" (/-) values on C1 are
not included in the required values list for single port latches. The single port C1 values for
good machine/fault machine will be 1/1.
These modifications for the Clock SA0 faults on a single port latch result in their being
described exactly the same as the Data SA0 and Data SA1 faults for the latch. That is, the
two Clock SA0 faults are redundant and are not present as distinct pattern faults for a single
port latch. There are then just six pattern faults for a single port latch, with the Data SA1 fault
really representing Data SA1 OR Clock SA0, and the DATA SA0 fault representing Data SA0
OR Clock SA0.
Automatic Static Pattern Faults for __MUX2
The static faults for the __MUX2 Primitive are shown in Figure 6-5 on page 97. The reason
for pattern faults on MUXes is to guarantee that adequate tests have been applied to test the
defects that can occur in these designs. Stuck-at 1/0 faults on the I/O pins of a MUX would
not force these robust test patterns. MUXes are usually constructed from transistor-level
designs that can exhibit Z or Contention states when faulty. Thus, Encounter Test pattern
faults try to provide thorough tests to expose such faulty behavior. Static pattern faults for a
MUX require each input to be selected and observed at both a 1 and 0 while all other data
inputs are at the opposite state.
Figure 6-5 Status Faults for MUX2 Primitive
SEL DATA0 DATA1 DOUT
DATA0 _MUX2
0/- 0/- -/1 0/1 SEL stuck 1 or data0 stuck 1
DATA1 DOUT 0/- 1/- -/0 1/0 SEL stuck 1 or data0 stuck 0
1/- -/0 1/- 1/0 SEL stuck 0 or data1 stuck 0
SEL
October 2015 97 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
Shorted Nets Pattern Faults
A shorthand method to represent two nets that are shorted together. The shorted nets pattern
faults are a form of static pattern faults.
Additional shorted nets pattern faults may be provided by the technology supplier or designer
in a fault rule.
Dynamic (Transition)
Dynamic Pin Faults
Pin transitions from zero to one (slow-to-rise) or from one to zero (slow-to-fall). This can be
on any pin in the model. By default Encounter Test generates the following dynamic pin faults:
Inputs of primitives slow-to-rise and slow-to-fall
Outputs of primitives slow-to-rise and slow-to-fall
More information about dynamic faults is included in Delay Defects in Encounter Test:
Guide 5: ATPG.
Dynamic Pattern Faults
A sequence of patterns to set up the inputs and the resulting good machine/fault machine
values to expect on the outputs in order to detect the fault. By default Encounter Test
generates dynamic pattern faults for the following primitives: XOR, LATCH, RAM, ROM, TSD.
The technology supplier or designer of a fault rule may provide additional dynamic pattern
faults.
More information about dynamic faults is included in Delay Defects in Encounter Test:
Guide 5: ATPG.
Automatically Generated Dynamic Pattern Faults
The automatically generated dynamic pattern faults are detailed in Figure 6-6 on page 99
through Figure 6-8 on page 101. If dynamic faults are requested when building the fault
model, these dynamic pattern faults are automatically generated unless you use
autopatternfaults=no on the build_faultmodel command line.
October 2015 98 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
Automatic Dynamic Pattern Faults for XOR
An XOR gate automatically receives the dynamic pattern faults shown in Figure 6-6 on
page 99. This figure shows that each input pin has four dynamic faults associated with it: a
slow-rising input to rising output; a slow-rising input to falling output; a slow-falling input to
rising output; a slow-falling input to falling output.
Note: There are output pin transition faults automatically defined for an XOR gate in addition
to the automatically generated pattern faults.
Figure 6-6 XOR Dynamic Pattern Faults Automatically Generated by Encounter Test
All possible input pin to output pin transitions are considered yielding 4*n dynamic patterns
faults for an n input XOR. Encounter Test allows an XOR primitive to have up to 256 inputs.
Pin transitions are shown as initial value > final value. Output values are shown as good value/
faulty value.
The same pattern can be defined by fully specifying A and B as by specifying B and O. In two-
input XOR cases, these patterns are equivalent. If more than two inputs are specified,
significantly fewer faults are created.
Automatic Dynamic Pattern Faults for TSD
The dynamic pattern faults automatically generated for a TSD primitive are shown in the
following figure. These six dynamic pattern faults model four potential defects: Data slow-to-
rise (DSR), Data slow-to-fall (DSF), Enable slow-to-rise (ESR) and Enable slow-to-fall (ESF).
October 2015 99 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
Figure 6-7 TSD Dynamic Pattern Faults Automatically Generated by Encounter Test
Data slow-to-rise (DSR) and data slow-to-fall (DSF) are modeled with the enable required ON
in the final state. Enable slow-to-rise (ESR) and enable slow-to-fall (ESF) are modeled with
ORed pattern faults to show two possible ways they might be detected.
Automatic Dynamic Pattern Faults for Latch Primitives
For Latch primitives, Encounter Test automatically generates a set of pattern faults for each
port of the latch.
As shown in the following figure, there are four dynamic pattern faults generated per port.
They cover the port being slow to change in either direction and the clock being slow to turn
OFF. These pattern faults are in addition to the slow-to-rise and slow-to-fall transition faults
automatically generated for each input pin of the Latch. This means that each port of a Latch
has a total of eight dynamic faults automatically generated for it by Encounter Test.
Note: There are clock and data input pin transition faults automatically defined for a Latch in
addition to the automatically generated pattern faults. These cover the clock or data pins
slow-to-rise and slow-to-fall defects.
October 2015 100 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
Figure 6-8 Latch Dynamic Pattern Faults Automatically Generated by Encounter Test
There are four dynamic pattern faults generated per port. They cover the port being slow to
change in either direction and the clock being slow to turn OFF. These pattern faults are in
addition to the slow-to-rise and slow-to-fall transition faults automatically generated for each
input pin of the Latch. This means that each port of a Latch has a total of eight dynamic faults
automatically generated for it by Encounter Test.
Parametric (Driver/Receiver)
A set of pattern faults to force all drivers to drive zero and one (and Z for three-state drivers)
and to force all receivers to receive zero and one. These are not really faults in the sense of
modeling a physical defect. Instead they are used to facilitate the testing of the drivers and
receivers under worst-case conditions. The technology supplier or designer cannot provide
pattern faults for driver/receiver objectives.
IDDq
IDDq faults represent defects that cause a CMOS device to use excessive current (IDD)
compared with the normal current into the Vdd bus. In Encounter Test, the static faults are
used for IDDq Tests. When an IDDq fault report is requested, the faults are identified as IDDq
with a status of T (tested) or U (untested).
October 2015 101 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
Bridge
A set of faults that define the defect that occurs when there is a short (bridge) between
adjacent nets. Encounter Test provides the capability of including static bridge faults or
dynamic bridge faults.
For a single pair of nets, there are 4 static bridge faults defined in an AND group. This means
all four of these faults must be tested in order to consider a bridge between the two
corresponding nets as fully tested. However, each individual fault in the group is marked
tested as it is detected so you can get partial credit for testing the bridge between the two
nets. The faults are shown in Table 6-1.
Also, for the same single pair of nets, there are four dynamic bridge faults defined in an AND
group. The faults are shown in Table 6-2.
Table 6-1 Static Bridge Faults - BRG_S { NET NetA NET NetB }
Required Values Propagation Values
(good machine / fault (good machine / fault
Description
machine) machine)
SBRG1on NetA NetA=0/X, NetB=1/1 NetA=0/1
SBRG1 on NetB NetA=1/1, NetB=0/X NetB=0/1
SBRG0 on NetA NetA=1/X, NetB=0/0 NetA=1/0
SBRG0 on NetB NetA=0/0, NetB=1/X NetB=1/0
October 2015 102 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
Table 6-2 Dynamic Bridge Faults - BRG_D {NET NetA NET NetB}
Initial Values Required Values Propagation Values
(good machine / (good machine / (good machine /
Description
fault machine) fault machine) fault machine)
DBRG1 on NetA NetA=1/1, NetA=0/X, NetA=0/1
NetB=1/1 NetB=1/1
DBRG1 on NetB NetB=0/1
NetA=1/1, NetA=1/1,
DBRG0 on NetA NetA=1/0
NetB=1/1 NetB=0/X
DBRG0 on NetB NetB=1/0
NetA=0/0, NetA=1/X,
NetB=0/0 NetB=0/0
NetA=0/0, NetA=0/0,
NetB=0/0 NetB=1/X
Fault Attributes
These classes of attributes are determined during the process of building the fault model or
initializing the fault status for a testmode. After the fault is placed in one of these categories,
it is not changed.
Ignored Faults (I, Iu, Ib, It)
When a fault is marked as Ignored, it means that there is no way to test the fault; it has no
effect on the design operation. These faults are omitted from the fault model entirely unless
includeignore=yes is specified during build_faultmodel.
The following categories of faults are omitted from the fault model by default:
Ignored - Dangling/unconnected/unused logic (Iu)
Faults on logic that does not feed any primary outputs nor observable latches and cannot
be observed.
Note: If all paths from the logic to observation points pass through blocks whose
simulation function is unknown to Encounter Test (Blackboxes), the logic is treated as if
it is dangling.
Ignored - Blocked logic (Ib)
October 2015 103 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
These are fault that cannot be observed because all paths from the logic to observation
points are blocked by values propagated from TIE blocks.
Ignored - Tied Logic (It)
These are faults that cannot be activated (excited) because the logic values required
from control points are blocked by TIE values.
Note: Outputs of blackboxes are treated as TIE blocks. They are tied to X unless
blackboxoutputs was specified with a different tie value on build_model.
The following categories of faults are included in the fault model but are marked with an
Ignored attribute:
Faults from previous categories when includeignore=yes is specified.
Faults that are identified as Ignored in a fault rule.
See Preparing an Ignore Faults File on page 40 for information on automatically
creating a fault rule file with Ignores for a level of hierarchy. See Pattern Faults and Fault
Rules on page 125 for information on manually creating a fault rule.
Ignored faults are not processed by test generation applications and are not included in
the divisor when computing fault coverage unless ignorefaultstatistics=yes is
specified on build_faultmodel.
See Build Fault Model Examples with Special Handling of Ignored Faults and Figure 6-
10 on page 115 for more information.
Example 1: Ignore Faults for Unconnected Logic
Example 2: Ignore faults that are blocked:
October 2015 104 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
Example 3: Ignore faults for tied logic
October 2015 105 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
Example 4: Ignore Faults feeding into/out of Blackboxes
Collapsed (C)
Faults that are logically equivalent are collapsed to a single representative fault. The
representative fault is called an independent fault or an Equivalence Class Representative
(ECR). The faults that are logically equivalent to an independent fault are called collapsed (or
reduced) faults. Generating tests only for independent faults is a commonly used time-saving
technique. A collapsed fault always has the same status as its representative fault. Faults are
collapsed from left to right except faults on primary inputs (which are retained).
Pre-Collapsed
By default, the fault model includes only the following faults on single AND/NAND, OR/NOR,
BUF/INV gates: stuck-at non-controlling on the inputs and both faults on the output. This
optimizes test generation/fault simulation by focusing their efforts on a single fault even
though it actually represents multiple potential defects in the hardware. Encounter Test terms
these faults as pre-collapsed since they are collapsed by definition rather than through an
analysis of the design. The faults on these blocks are:
AND/NAND gates have s-a-1 faults on the inputs and both s-a-1 and s-a-0 on the output;
s-a-0 faults on the inputs are pre-collapsed
October 2015 106 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
OR/NOR gates have s-a-0 faults on the inputs and both sa-1 and s-a-0 on the output; s-
a-1 faults on the inputs are pre-collapsed
BUF/INV gates have no faults on the input and both s-a-0 and s-a-0 on the output- s-a-
0 and s-a-1 faults on the input are pre-collapsed
Grouping (&, I)
Fault grouping is used for modeling defects whose behavior is complex.
OR Group (I) - If any one of the faults is tested, they are all tested.
AND Group (&) - All faults in the group must be tested to expose the defect.
While Encounter Test supports fault grouping for better modeling of defects, it does not
provide any test coverage statistics for the groups (defects). All coverage reporting is in terms
of the individual faults. One effect of this is to give partial credit for an AND group where some,
but not all of the faults in the group are tested.
When any fault in an OR group is detected, all faults within that group are marked as detected.
This eliminates any further test pattern generation or fault simulation effort on that group, to
help reduce the run time.
A fault group is identified by the & (AND) or | (OR) symbol next to each fault in the group. All
faults within a group have consecutive indexes, and so will appear consecutively in a fault list.
Possibly testable at best faults (PTAB)
This is a characteristic of the fault that means there is no way Encounter Test can generate a
test that is guaranteed to test the fault; but it may be able to be Possibly Tested (P). Possibly
testable at best faults are not processed by test generation applications (by default). There
are separate statistics maintained for these faults.
Possibly testable at best faults may be identified in a fault rule. Refer to Preparing an Ignore
Faults File on page 40.
The possibly testable at best faults can be identified as:
(3) -- PTAB faults that cause three-state contention on one or more nets or that cause
High-Z on one or more three-state nets without Termination or Keepers.
(X) -- PTAB faults that cause TIE-X signals to propagate to observation points (POs or
scannable latches).
October 2015 107 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
(C) -- PTAB faults that cause all clocks (or the only clock) on one or more memory
elements to be Stuck Off.
If a possible test is generated for a PTAB fault, the status is marked as P3, PX, or PC. If, during
ATPG, you request the possibly tested faults marked as Tested after some number of possible
tests have been generated, the status is marked as T3, TX, or TC.
Active and Inactive (i)
When the testmode fault status is initialized, every fault that is not ignored is either active in
the testmode or inactive.
Active faults
An active fault is any fault that propagates to a PO or scannable flop while the circuit is in the
scan state or test constraint state for the testmode. Active faults can be testable, untestable,
redundant, or aborted. It is only the active faults that are given a Fault Test Status.
Inactive faults ( i)
An inactive fault is one that cannot be detected in this test mode due to being blocked by a TI
(Test Inhibit) primary input or fixed-value latch. See Identifying Inactive Logic in the
Encounter Test: Guide 2: Testmodes for more explanation of inactive logic. Inactive faults
are not processed by test generation or simulation run in this testmode. Unlike Ignored faults,
Inactive faults may be active, and therefore, tested in a different testmode.
Fault Test Status
Logic Faults, IDDq Faults, Driver/Receiver Objectives, Stuck Driver and Shorted Nets
Objectives may all be given a Test Status based on the success or failure of the test
generation/fault simulation process to generate test patterns for them.
An active fault is classified in exactly one of these categories:
Tested (T)
Some test has been generated in this test mode that will fail in the presence of this fault. Thus,
application of the test stimulus will cause a difference (0/1 or 1/0) at a tester-observable point
October 2015 108 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
(primary output or scannable reg) in the expected good response vs. the response in the
presence of the fault. A fault can be marked tested in one of several ways:
Tested by Simulation (T)
The fault simulation determined that the fault is detected by the patterns (may be patterns
from ATPG or manual patterns)
Tested by Implication (Ti)
The fault is expected to be detected when patterns are applied at the tester, but no fault
simulation was performed to ensure it. One example is scan chain faults that are marked
tested by apriori fault markoff. Another example are faults that cause single port, non-
scannable memory elements to have their clocks "stuck off". If such memory elements are
seen to write both zero and one during ATPG fault imply process, then the "clock stuck off"
faults are detected by "implication".
Tested by Possibly Detected Limit (Tpdl)
The fault is really possibly tested but you have requested that it be marked tested after a
specific number of patterns possibly tested it. If a fault is possibly tested many times, it is
possible that there is a difference that could be observed between the good value and the
value in the presence of the fault. Encounter Test fault simulation provides a keyword, pdl=n,
to specify how many times a possibly detected fault is going to be simulated against additional
patterns and another keyword, markpdlfaultstested=yes, to specify that if the pdl limit
is reached the fault should be marked tested rather than possibly tested.
Tested in Another Mode (Tm)
The fault is active in more than one testmode that are participating in Cross-Mode Markoff
(MARKOFF) and it was marked Tested in another mode. It is not known whether patterns
created in this testmode also would have detected the fault since it is removed from
processing as soon as the other testmodes results were committed.
Tested User Specified (Tus)
The fault has not been processed with ATPG or fault simulation in this design. A fault rule with
the DETECTED statement was used as input to mark the fault tested during the building of
the fault model.
October 2015 109 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
Possibly Tested (P)
The fault may or may not be tested by the patterns. A test has been generated in this test
mode where the good value is known (0 or 1) but the value in the presence of the fault is
unknown by the simulator (X). When the patterns are applied at the tester the value will be
seen as a 0 or 1; if it differs from the good value then the fault is tested.
Aborted (A)
ATPG processed a fault but was unable to generate a test or prove it untestable. This happens
when some part of the ATPG process exceeds an internal limit or there is a problem that
prevents the test from being completed. In some cases increasing the setting of the effort
keyword in ATPG will allow the fault status to be resolved.
Redundant (R)
Test generation or Fault Analysis determined that the fault is untestable due to logical
redundancy or tied logic that have nothing to do with the design state caused by any test
mode. Faults marked redundant in the master fault status are not processed in any test mode.
Redundant: User Specified (Rus)
The fault was not processed by test generation or fault analysis in this design. A fault rule
with the REDUNDANT statement was used as input to mark the fault redundant during the
building of the fault model.
Untested Not Processed (u)
This is the status of all active faults before they are processed by test generation and/or fault
simulation. Faults can remain untested not processed after ATPG if some run stopping
criterion (set by keywords starting with max) was reached before these faults were
considered for test generation or fault analysis and no patterns generated for other faults
happened to detect these too.
Untestable
The test generator was unable to create a test for the fault in this test mode. The following
untestable reasons are identified and can be reported. Note that if you run ATPG multiple
times it is possible for the untestable reason to be different due to a variety of reasons
October 2015 110 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
including, but not limited to, different lineholds, ignoremeasures, test sequence, constraints,
timings, or keyword settings.
Untestable: Undetermined (Ud)
No test can be generated for this fault, but no single reason to explain why could be
determined.
Untestable: User Specified (Uus)
The fault was not processed in this experiment. A fault subset was created with the fault
marked as untestable and that fault subset was used for the experiment that resulted in this
status.
Untestable: Linehold inhibits fault control/observe (Ulh)
The test generator encountered logic value(s) originating from linehold(s) (LH flagged test
function pin, or specified via a user file), which are inconsistent with logic value(s) required to
test the fault.
The linehold file used during ATPG prevents testing of this fault.
Untestable: X-sourced or sinked (Uxs)
A test for this fault requires values on one or more nets that cannot be set to known values
(the nets are at X). Non-terminated three-states and clock-stuck-off are specific types of X-
sources that are categorized separately. This general category of other X-sources includes
the following:
TIEX
sourceless logic
feedback loop (not broken by a latch)
ROM with unknown contents
RAM contents if the Read_enable is off
Faults that cause more than one port of a latch to turn on
October 2015 111 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
As an example, if a TIEX block feeds an AND gate, this makes it impossible to drive a 1
on the output of the AND gate. This, in turn, will prevent testing the OSA0 fault on the AND
gate.
Untestable: Seq or control not specified to target fault (Unio , Unil, Unlo, Unra, Uner)
The fault is in a portion of the logic that cannot be tested due to user control or test sequence.
For example, if create_logic_delay_tests is set to process only intra-domain faults that
require repeating clocks, then faults that are not in intra-domain are untestable. The user can
control the selected sequence filter, a test sequence, test mode constraints (TCs) or
lineholds. Refer to Delay and Timed Test in Encounter Test: Guide 5: ATPG for more
information.
This status is further categoried by the path along which the fault needs to be detected:
Untestable fault between Primary Inputs (PIs) and Primary Outputs (POs) (Unio)
Untestable fault between Primary Inputs (PIs) and Latches or Flip-Flops (Unil)
Untestable fault between Latches or Flip-Flops and Primary Outputs (POs) (Unlo)
Untestable fault within intra-domain logic (Unra)
Untestable fault within inter-domain logic (Uner)
Untestable: Testmode inhibits fault control/observe (Utm)
A test for this fault cannot be produced due to conflicts with pins that are already at value from
setting the design into the state set up by the testmode.
A test for this fault conflicts with the TC (and perhaps the TI) pins or fixed value regs. Faults
conflicting with a TI pin are normally identified as inactive in the testmode.
Untestable: Sequential depth (Usd)
This fault was discovered to be untestable during multiple time image processing. If the
sequential test generator was not used, it may be able to test the fault.
Untestable: Global termination (Ugt)
A test for this fault requires termination on some three-state primary output, but the tester-
supplied termination does not permit termination to the state required by the test. If your IC
manufacturer can support a different termination value, you can change the global tester
October 2015 112 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
termination value during test generation with the globalterm keyword. Note that changing
the tester termination may cause the fault to become testable or to become untestable for a
different reason.
Untestable: Constraint (Ucn)
A test for this fault cannot be produced without violating the clocking constraints specified by
the automatic or user specified clock sequence(s).
Fault/Test Coverage Calculations
The normal static test coverage is calculated as follows:
TCov= # Tested static faults
# globally active static faults X 100
(Test Coverage)
The ignore fault coverage is calculated as follows:
TCov= # Tested static faults
X 100
# globally active static faults + globally ignored static faults
(Fault Coverage)
The following figures show the complete set of coverage calculations.
The calculations for dynamic faults are done similarly and the ignored counts are added to
the denominator in the test coverage calculation. For ATCov (adjusted test coverage), the
globally ignored faults are subtracted from the denominator. For more details, refer to Report
Fault Coverage Statistics on page 54.
October 2015 113 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
Figure 6-9 Test Coverage Formulas Used By Encounter Test
TCov= # faults Tested
X 100
#faults
(Test Coverage)
# faults Tested
ATCov= X 100
(Redundant Test Coverage) #faults - # faults Untestable due to redundancies
# faults Tested
ATCov= X 100
#faults - # faults Untestable due to redundancies
(Tested,Redundant Test Coverage)
# faults Tested + #faults possibly tested
PCov= #faults X 100
(Possiby Detected Coverage)
# faults Tested + #faults possibly tested
PCov= #faults X 100
(Tested, Possibly Detected Coverage)
# faults Tested + #faults possibly tested
APCov= #faults - # faults Untestable due to redundancies X 100
(Redundant, Possibly
Detected Coverage)
# faults Tested + #faults possibly tested
APCov= #faults - # faults Untestable due to redundancies X 100
(Tested, Redundant, Possibly
Detected Coverage)
The following testmode coverage calculations are used when build_faultmodel option
ignorefaultstatistics=yes is specified:
October 2015 114 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
Figure 6-10 Test Coverage Formulas with Ignore Faults
TCov= # Tested global faults
X 100
(Fault Coverage) # global faults + globally ignored static faults
# Tested in mode
ATCov= X 100
(# test mode faults - # faults Untestable due to
(Test Mode Adjusted Test Coverage) redundancies - #globally ignored faults)
# Tested faults + # faults Untestable due to redundancies +
#globally ignored faults + # ATPG untestable faults + # faults possibly tested)
ATPG Effectiveness= X 100
# faults + globally ignored static faults
Fault Modeling
The faults defined in the previous section are related to the design model in what is termed a
Fault Model.
For most test generation tasks, the standard Encounter Test fault model is created and
used as input. This fault model includes all the static and dynamic pin and pattern faults
as well as the driver/receiver objectives and Iddq faults.
Stuck-Driver and Shorted Nets testing (Interconnect/IO Wrap Testing), requires a
different fault model that includes only the objectives for these tests. This Objective
Model can be created at the same time as the standard fault model, or may be created
separately.
The Path Delay fault model can be used as an input to Path Delay Test Generation. See
Path Delay on page 118 for additional information.
Any number of alternate fault models may also be created. These fault models can be an
exact copy of the regular fault model if desired. These unique fault models were initially
supported for use with diagnostics -- to allow for better modeling of some types of
manufacturing defects such as bridging faults. However, their support has been
generalized so they may be used for test generation if the need arises.
Note: Patterns generated using one fault model do not cause faults to be marked off in any
of the other fault models. If that is desired, the patterns would need to be resimulated against
the other fault model. Refer to Figure 1-1 on page 15 for a depiction of the flow.
October 2015 115 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
Pin Faults and Pattern Faults
These two basic fault types are modeled in Encounter Test as:
Pin Faults
Static (Stuck-At) Faults
Dynamic (Transition) Faults
Pattern Faults
Static Pattern Faults
Dynamic Pattern Faults
Shorted net faults
Refer to Fault Types on page 91 for additional information.
Pin faults do not always accurately model certain static defects. For better defect modeling,
Encounter Test provides support for pattern faults. A static pattern fault represents a static
defect by identifying a set of values required on specific logic nets to excite the particular
defect being modeled. Once excited, the defect's effect appears at the output of a logic gate
or on some specific net and must be propagated to an observable point just like any other
fault.
Pattern faults can be grouped such that two or more pattern faults represent a single defect.
The group can be identified as either an ORing group or an ANDing group. An ORing group
implies the defect is considered detected if any faults in the group are detected. An ANDing
group implies the defect is considered detected only if all faults in the group are detected.
Partial credit is given for those faults in an ANDing group which have been detected.
As an example, a short between two nets can be represented by two pattern faults in an
ORing group. The first fault requires net A to be zero and net B to be a one, with the fault effect
propagating at net B as a good design 1/faulty design zero (this assumes logic zero
dominates a logic one). The second fault in the group requires net A to be a one and net B to
be a zero, with the fault effect propagating from net A as a 1/0. Detecting either of these faults
automatically gives credit to the other fault. Encounter Test provides a shorthand means of
defining a two-net short defect within a fault rule file for an entity in the hierarchy of the design.
Cross-Mode Markoff (MARKOFF)
When you create a testmode, you can specify that the testmode belongs to one or more
groups called comets. Comets are used to group testmodes for the purpose of reporting fault
coverage. There are two types of comets:
October 2015 116 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
Cross-Mode Markoff (MARKOFF) Comet
The cross-mode markoff comet allows you to obtain cumulative fault coverage across
multiple testmodes and reduces test generation time by not reprocessing the fault in
several different testmodes.
It also reduces tester time by only generating a single test for each fault. By default, a
cross-mode markoff comet is created for each tester description rule name and all
testmodes that use that tester description rule are automatically included in the same
comet. This ensures that if a fault is tested in one testmode, it will not have another test
generated in another testmode targeted for the same tester.
If a single cross-mode markoff comet is defined for the design, or if there are multiple
markoff comets but they do not have any testmodes in common, then the rules are
simple. When an experiment is committed, the tested status of the faults for that
testmode is saved. If a tested fault is active in other testmodes, then commit_tests also
processes the other testmodes that have the same markoff comet defined and marks the
fault as tested in another mode (Tm).
The rules get a little more complicated if a testmode belongs to more than one markoff
comet, so this is not recommended. Here is an example of how it works when testmodes
are included in more than one markoff comet. Consider a design with three testmodes,
A, B, and C, with three faults f1, f2, and f3 active in all three testmodes. Assume two
comets have been defined: Comet1 consisting of modes A and C, and Comet2
consisting of modes B and C. Now, suppose a test generation run is committed for
testmode A that tested both faults f1 and f2. These faults are marked tested in mode A,
but are not marked in modes B and C, because no faults have yet been tested by modes
belonging to Comet2. Next, suppose a test generation is run in mode B, which tests fault
f1. When this experiment for mode B is committed, fault f1 is marked tested (T) in mode
B and tested in another mode (Tm) in mode C. Note that fault f1 has now been tested for
each comet, and mode C does not belong to any other markoff comets. Next, a test
generation is run in mode C that tests fault f3. When the experiment for mode C is
committed, fault f3 is marked tested (T) in mode C and tested in another mode (Tm) in
both modes A and B.
When you report the tested faults in a testmode belonging to a markoff comet, the status
indicates which faults are tested in that testmode and which faults are tested in another
mode (Tm).
Statistics-Only (STATS_ONLY) Comet
The statistics-only comet allows you to obtain fault statistics for a group of testmodes
without having cross-mode markoff.
Note: As stated previously, Encounter Test automatically creates a mark-off comet for
the Tester Description Rule (TDR), therefore, if you have multiple testmodes that use the
October 2015 117 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
same TDR, they will automatically get the benefit of cross-mode markoff. If you choose
to define your own comets, it is recommended that you define the TDR comet as
stats_only to avoid the complexity of having a testmode in more than one comet. This
must be done in the mode definition file for each testmode that uses that TDR.
As an example, assume you are using a tester named HALLEY and you have four
testmodes named MODE1, MODE2, MODE3, MODE4.
You want to define two comets; BORELLY to include MODE1 and MODE2 and
HARTLEY to include MODE3 and MODE4.
By default MODE1 and MODE2 would be in BORELLY and HALLEY; and MODE3 and
MODE4 would be in HARTLEY and HALLEY which would make the cross-mode markoff
more complex. To avoid this, include the following comets statement in the mode
definition files for MODE1 and MODE2:
COMETS = HALLEY STATS_ONLY, BORELLY MARKOFF ;
This makes HALLEY a stats_only comet so it will not be considered during cross-
mode markoff for this testmode.
BORELLY will be used for cross-mode markoff so once a fault is tested in MODE1
it will be marked off in MODE2 and vice versa.
In the mode definition files for MODE3 and MODE4, include the following comets
statement:
COMETS = HALLEY STATS_ONLY, HARTLEY MARKOFF ;
This makes HALLEY a stats_only comet so it will not be considered during cross-
mode markoff for this testmodes.
HARTLEY will be used for cross-mode markoff so once a fault is tested in MODE1
it will be marked off in MODE2 and vice versa.
If you want to disable cross-mode markoff altogether, simply define the TDR as a
stats_only comet in every testmode. However, this is not recommended as there is
significant benefit to tester time, test generation time and the volume of vector data when
using cross-mode markoff.
Other Test Objectives
Path Delay
A signal path with a total delay exceeding the clock interval is a path delay fault, represented
by functional pins or signals. A path delay fault consists of the combinational network between
October 2015 118 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
a latch/primary input and a latch/primary output for which a transition in the specified direction
does not arrive at the path output in time for proper capture.
A fault model may be built for use in Path Delay Test Generation using prepare_path_delay
with a pathfile input.
Figure 6-11 shows an example of a path delay test objective. The transition from 0 to 1 is
released from DFF1 along path A, B, C, D and captured at DFF2.
Figure 6-11 Path Delay Fault Example
Package Test Objectives
There are three types of test objectives for Package Test:
Stuck Driver Test (SDT)
Shorted Nets Test (SNT)
Slow-to-Disable
Objective Types
Stuck Driver and Shorted Net Objectives
Stuck driver and shorted net objectives are defined for I/O wrap and interconnect test
purposes. Both of these objectives are based upon target nets. For a chip, the target nets are
those connected to bidirectional package pins. For higher level packages, the target nets are
the package pin nets and the nets that interconnect the components.
October 2015 119 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
Stuck Driver Objectives
Stuck driver objectives are defined to check the integrity of the path from a driver to each of
its receivers. A driver is any combinational primitive logic function which is not a buffer,
resistor or mux. When the net is a multi-source net, the drivers are the primitives that source
the net. A receiver is any combinational primitive logic function which is not a buffer or resister.
Typical examples of receivers are ANDs/ORs, and POs.
Shorted Nets Objectives
Shorted nets objectives are defined to check the integrity of the paths for a set of target nets.
Each net participating in a shorted nets test will have one of its drivers supplying a value to
the net at same time as other nets participating in the test. The values driven on to the nets
is determined by a logorithmic counting pattern known as O=2*logN (or counting and
complement) where N is the number of target nets and O is the number of shorted nets
objectives. For example, six shorted nets objectives are defined for eight target nets (N=*) as
follows:
Target Objective Number
Net 1 2 3 4 5 6
------------------------------
n1 0 0 0 1 1 1
n2 0 0 1 1 1 0
n3 0 1 0 1 0 1
n4 0 1 1 1 0 0
n5 1 0 0 0 1 1
n6 1 0 1 0 1 0
n7 1 1 0 0 0 1
n8 1 1 1 0 0 0
Slow-To-Disable Objectives
A slow-to-disable objective is a stuck driver objective defined to detect a driver which is slow
to transition to its inactive (disable) state. Definition of, and test generation for, slow-to-disable
objectives is optional and only applies to interconnect testing. You must provide an
objectivefile to the Build Package Test Objectives process for slow-to-disable objectives to be
defined.
Objective Status
^ = inactive Objective is inactive
u = untested Objective is untested
October 2015 120 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
T = tested Objective is Tested
c = precondition failed The receiver latch was unable to be
preconditioned to the opposite of the
final state of the objective. So, for
example, for a driver-stuck-at-1
objective, the receiver will be
preconditioned to 0. This is determined
by analysis done when the objective
model is built; it is not a condition
caused by the experiment environment.
This does not affect the ability to
generate a test for the objective. This
status will be shown in addition to the
testability status.
Tc = Tested and precondition The objective was tested even though
failed preconditioning failed. This means that
the test is not as high quality because
the receiver latch could have been at
the final state prior to applying the test.
!ti = test inhibit The objective was not tested and a
likely cause is a Test Inhibit value that
prevents the test.
!3s = 3-state contention The objective was not tested because
the test would cause three-state
contention. If the design can tolerate
soft contention, run with
contentionreport=hard to see if
the test can be generated.
!nt = non-terminated 3 state The objective was not tested and a
likely cause is that a non-terminated
three-state causes an unknown (X)
value that prevents the test.
!mc = multi-clock The objective was not tested and
multiple clocks were required.
October 2015 121 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
!so = SOS conflict The objective was not tested because
simultaneous output switching
requirement would be violated. If the
SOS constraints are not required for the
test, use sos=no to allow simultaneous
output switching.
!pm = PMU conflict The objective was not tested and a
likely cause is the constraints of testing
with parametric measuring unit(s).
When the boundary=internal
testmode limits the number of pins that
the tester can contact at one time, the
process is limited to using the tester
contacted pins plus additional pins that
can be contacted using the available
parametric measuring units (PMUs).
The test for this objective may require
more pins, or a different combination of
pins, than are available during the test.
!lh = user linehold The objective was not tested and a
likely cause is that the specified
lineholds prevent the test. Try running
without lineholds or with a different set
of lineholds.
Note: Lineholds specified with the LH
test function may be overridden in a
linehold file.
!tg = Test gen constraint The objective was not tested and a
likely cause is that the test cannot be
generated without violating pattern
constraints specified in the design
source or in the constraints file input to
build_model.
!nc = non-contacted pin The objective was not tested and a
likely cause is that the test requires one
or more pins that are not contacted in
this boundary=internal testmode.
!ud = undetermined reason The objective was not tested but the
reason cannot be determined.
October 2015 122 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
!nr = not controllable The objective was not tried because it
(apriori) is not controllable.
!no = not observable (apriori) The objective was not tried because it
is not observable.
!nd = no delay test path The slow-to-disable objective was not
(apriori) tried because there is no delay test
path.
!tl = tester load (apriori) The objective was not tried because
tester loading inhibits observability.
#sc = scan conflict The test for the objective could not be
completed due to conflicting
requirements with the scan latches.
#sb = Incomplete Test: Single The test for the objective could not be
burnout completed due to 3-state contention.
#tr = Incomplete Test: Timing The test for the objective could not be
Reject completed because it violated timing.
#uc = Incomplete Test: User The test for the objective could not be
clock seq completed because it does not match
the specified testsequence.
$A = aborted The generation of the test was aborted.
$3s = 3-state contention The generation of the test was aborted
protection while trying to globally protect the
design from 3-state contention. Try
running with
contentionprevent=no to get past
this issue. If the specific test for the
objective causes contention, the
objective will be marked with !3s.
October 2015 123 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Concepts
October 2015 124 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
A
Pattern Faults and Fault Rules
Fault Rule File Syntax
Following is the syntax specification for the fault rule file, which always starts by identifying
the entity to which it pertains.
Figure A-1 Fault Rule File Syntax
October 2015 125 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
October 2015 126 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
October 2015 127 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
Syntax Notes:
1. Comments delineated with a /* */ can be included wherever a space can exist. A line
containing only a comment is valid. However, a comment may not span lines. That is, a
comment cannot contain any newline characters. A single line comment delineated with
// is also supported.
2. Keywords may be specified in upper, lower or mixed case within the fault rule file. The
characters that appear in uppercase indicate the abbreviated form of the keyword. For
example, the keyword "entity" is recognized when specified as either ENTITY or ENT.
3. Lower case characters indicate variables.
4. entityname, netname, and pinname can be any character string that does not
contain blanks, tabs, newlines, or the { }, " ", /* */ delimiters.
If the name matches any of the allowed fault rule keywords, it must be enclosed in quotes
(for example, "z" or "short0").
5. "text" (a quoted string delineated with " ") may not span lines. It can contain any
characters except newline and the double quote delimiter (").
6. Newline characters may be inserted anywhere in the fault rule file, except within a
comment, keyword, variable or quoted string.
7. NOFAULT and FAULTONLY cannot be specified within the context of an ENTITY
statement. NOFAULT and FAULTONLY are the only two fault rule statements that are
allowed outside an ENTITY.
Fault Rule File Element Descriptions
The following describes the elements of the fault rule file syntax:
ENTITY
This defines the name of the containing block (a Verilog module) to which this fault rule
file applies. It is acceptable to have more than one model entity included in the same fault
rule file.
Note: A curly brace is required in the syntax if specifying multiple entities as shown in
Example A-1.
Example A-1 Multiple ENTITY Specification
############################################################
ENTITY = CLKINVX1
{
IGNORE { SA0 PIN "Pin.f.l.CLKINVX1.nl.I0.A0" }
October 2015 128 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
IGNORE { SA1 PIN "Pin.f.l.CLKINVX1.nl.I0.01" }
}
ENTITY = PDUDGZ
{
IGNORE { SA0 PIN "Pin.f.l.PDUDGZ.nl.__i0.tsd.ENABLE" }
IGNORE { SA1 PIN "Pin.f.l.PDUDGZ.nl.__i0.tsd.DOUT" }
}
############################################################
TIME
This provides a mechanism for auditing the fault rule.
DATE
This provides a mechanism for auditing the fault rule.
AND
Provides for the grouping of two or more pattern faults that model a single defect. An
AND group implies the defect is considered detected only if all faults in the group are
detected. Refer to Grouping (&, I) for more information.
OR
Provides for the grouping of two or more pattern faults that model a single defect. An OR
group implies the defect is considered detected if any fault in the group is detected. Refer
to Grouping (&, I) for more information.
STATIC
Begins the definition of a static pattern fault. A static pattern fault is used to model a
defect which can be detected regardless of the speed at which the test patterns are
applied. A static pattern fault specifies a set of REQUIRED net or pin values to excite the
defect and a single PROPAGATION net or pin value to identify where the effect of the
defect first appears.
DYNAMIC
Begins the definition of a dynamic pattern fault. A dynamic pattern fault is used to model
a defect which requires a sequence of patterns to be applied to the design within a
specific period of time. A dynamic pattern fault specifies both a set of INITIAL net or pin
values and a set of REQUIRED net or pin values which together identify the nets which
must go through a specific value change (transition), and a PROPAGATION net value to
identify where the effect of the defect first appears.
PATH
October 2015 129 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
Identifies a fault that is to be marked as a "pathfault" in the fault model that is to be built
with this fault rule.
REQUIRED
A list of nets or pins and their values which are required to excite the defect.
PROPAGATION
Specifies the net or pin where the defect's effect first appears. Also specifies the good
machine/faulty machine values for that net or pin in the presence of the fault excitation
conditions.
INITIAL
A list of nets or pins and their values that represent the initial conditions required to excite
a dynamic pattern fault. These nets and values are used in conjunction with the
REQUIRED net value pairs to fully specify the excitation requirements for a dynamic
pattern fault or a path pattern fault. In order for the defect to be considered "excited", the
INITIAL net values must exist immediately before a clocking event that produces the
REQUIRED net values.
SHORT0
A shorthand means of specifying two pattern faults which represent two nets shorted
together with the effect that whichever net has a logical value of zero pulls the other net
to zero as well.
SHORT1
A shorthand means of specifying two pattern faults which represent two nets shorted
together with the effect that whichever net has a logical value of one pulls the other net
to one as well.
BRG_S
Static bridge fault between the specified nets or pins.
BRG_D
Dynamic bridge fault between the specified nets or pins.
BRG_SD
Both static and dynamic bridge faults between the specified nets or pins.
NET
The net must be within the context of module on the ENTITY statement. To specify a net
defined in the module, use the simple name of the net, for example net01. To specify a
October 2015 130 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
net within a lower level entity, use the hierarchical name of the net, for example
usage1.net01.
A hierarchical name is comprised of instance names for each level in the hierarchy down
to the block containing the net or pin, and the simple name of the net or pin within the
block which defines it. The instance names and simple name are joined with periods (.)
between them. For example, usage1.usage2.net1 would refer to usage-block "usage1"
within the definition block and within that block, the "usage2" usage-block and the net
"net1" within it.
Figure A-2 Example of NET Statement
PIN
A pin name can be used instead of a net name when it is more convenient to do so;
however, the pins being specified should not be pins on primitive gates since the
Encounter Test Build Model process may rename the pins on primitive gates. The only
pin on a logic gate which could be reliably specified in a fault rule file is the single output
pin, whose pin name should always be "01". Pin names may be either simple; for
example, "pin01", or they may be hierarchical; for example, "usage1.pin01".
See example in Figure A-2.
IGNORE
Identifies a fault that is to be ignored. These faults will be marked ignore in the fault model
that is built with this fault rule. Unlike faults that are removed with a PFLT pin attribute, all
October 2015 131 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
faults that are found to be equivalent to an ignored fault (during fault collapsing) are also
marked ignore.
This element supports the use of wildcards as shown in the example below. The wildcard
is * character.
IGNORE { SA1 PIN rlm.usage*.pinZ}
Note: IGNORE NET and IGNORE PATTERN do not allow wildcards
PTAB
Identifies a fault that is to be marked "Possibly Testable at Best" in the fault model that is
built with this fault rule.
The Write Ignore Faults application uses this syntax for faults that are identified as:
untestable due to unknown (X) source.
untestable due to three-state contention.
untestable due to non-terminated three-state.
possibly testable at best.
DETECTED
Identifies a fault that is to be marked "detected" in the fault model that is to be built with
this fault rule.
REDUNDANT
Identifies a fault that is to be marked "redundant" in the fault model that is to be built with
this fault rule.
OMIT
Identifies the fault that is to be omitted from the fault model. The fault will not exist and,
therefore, will not be included in any fault reports or statistics for the fault model built with
this rule.
SA0
A pin stuck-at-zero fault.
SA1
A pin stuck-at-one fault.
SR
October 2015 132 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
A pin slow-to-rise fault.
SF
A pin slow-to-fall fault.
DRV0 - All drivers drive .
DRV1 - All drivers drive 1.
RCV0 - All receivers receive
RCV1 - All receivers receive 1
PATTERN
A pattern fault. The pattern fault identification is the unique identifier that is printed in the
fault listing for this fault. Each pattern fault owned by a block is assigned a unique
identifier.
PIN
The pin containing the fault. For Ignore and PTAB faults, the hierarchical pin name
refers to the specific pin (input or output) that contains the specified fault.
BLOCK
The block containing the pattern fault. This is the hierarchical name of the block that
contains the pattern fault. Either short or proper form of the name is allowed.
Text
Text is a comment that is not discarded by the Fault Model Builder, but is carried forward
into the Fault Model File. No syntax checking is done on the text inside the quotation
marks, which may include any characters except carriage return or newline.The
maximum length is 1024 characters. Text is used only for informational purposes; it is
printed in Fault Model listings, may be viewed on the GUI, and is printed in the
diagnostics callout report, but is ignored by all other Encounter Test applications and
tools.
RequiredValues
A logic value or value pair used to represent the logic value(s) required for a net or pin in
order to excite the defect. The basic syntax allows for specifying both the good design
and the faulty design logic values required to excite the defect. When both are specified,
the good design value is first, with a slash (/) used to separate the good and faulty design
values. If only one value is specified, it is assumed that the same value is required in both
good and faulty designs to excite the defect.
October 2015 133 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
In some cases, the logic value on the net or pin may not matter (a "don't care" condition).
In these cases a logic value of X should be specified. For example, to model an input pin
stuck-at-1 defect, the pattern fault required value should be specified as 0/X for the pin
with the fault since the defect itself will cause the faulty design to assume a logic 1 value
if all other requirements are met. A value of X is achieved in the good machine by the
absence of a pin specification.
Encounter Test allows a required value to be "don't care" in the faulty design, such as 1/
X or 0/X. It is also possible to specify that the good design is a "don't care", such as X/0
or X/1. The former can be used to specify additional requirements to enable test
generation to get the propagation node to its proper state so that there will be a difference
between the good design and the faulty design. The latter can be used when the
propagation node will have the correct value regardless of what the node has on it at the
time, but the fault requires the value in order to excite the defect (cause the fault simulator
to inject it).
A value of P is used only in the specification of a path pattern fault. It is placed at other
points along the path, including the master latch or primary output where the result of the
transition is to be observed. Path pattern faults are normally defined only by the path test
applications based on user specification of paths. Refer to Refer to Path File in
Encounter Test: Guide 5: ATPG for additional information.
PropagationValues
A logic value pair used to represent the logic values that will propagate from the specified
net or pin whenever the defect has been excited. The values are specified for both the
good design and the faulty design respectively, with a slash (/) used to separate them. It
is important that the good design propagation value that is specified should be the value
obtained whenever the good design required values are obtained. If the listed required
values are not sufficient to produce the specified good design propagation value, it is
unpredictable whether the fault will be detected by any tests that are automatically
generated. V means a value of 0 or 1, that is, a "don't care", and ~V is used in conjunction
with V to specify the opposite value of V. For example, 1 if V ends up being a 0, or 0 if V
ends up being a 1.
NOFAULT
Identifies faults to be excluded by identifying logic that is not to have faults. The logic that
is not be faulted is specified with Block, Instance, Cell, or Module.
The type of faults to be excluded are static, dynamic, or both.
A NOFAULT statement with no STATIC/DYNAMIC designation excludes both STATIC
and DYNAMIC faults.
Instance - The name of the instance whose faults are to be excluded. Wildcards can
be specified for the Instance name, for example, NOFAULT STATIC Instance a*c in
October 2015 134 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
CELL xyz (wildcard is allowed only for the instance name, not the cell name in this
statement).
Note: MODULE is a synonym for cell in this statement.
Block - The short or proper form of the hierarchical name of the block whose faults
are to be excluded. Wildcards can be specified for the block name. For example,
NOFAULT DYNAMIC Block *Z.
Cell or Module - The name of the module whose faults are to be excluded. Cell is a
synonym of Module. Wildcards can be specified for the Cell or Module name. For
example, CELL x*z or Module ab*.
Names containing special characters must be enclosed in dowble quotes. Wildcards
represent one or more alphanumeric characters and are not case sensitive. It is
recommended not use wildcards for NOFAULT within FAULTONLY blocks.
Note: When using a "*" wildcard character, if square brackets are part of the search
string, a syntax error is generated on Linux platform. For example, if a string with the
wildcard pattern "*rry[0]" is specified while searching for a block name "carry[0]" in the
fault model, the search is successful on AIX but not on Linux. Therefore while specifying
patterns with "[" and "]" brackets, it is necessary to enclose each bracket character in a
set of brackets "[]" in order for each bracket character to be treated as part of the name.
The pattern "*rry[0]" needs to be specified as "*rry[[]0[]]". This is a known problem.
FAULTONLY
Identifies specific logic to fault while excluding faults on all other blocks. The identifier can
be specified in mixed case. Faults are placed on all appropriate blocks within this block,
all the way down the hierarchy. You can specify more than one FaultOnly statement in a
fault rule file. All blocks specified will be faulted.
The type of faults included only on this logic can be static, dynamic, or both.
A FAULTONLY statement with no STATIC/DYNAMIC designation affects both STATIC and
DYNAMIC faults.
Following is an explanation of the keywords used in the FAULTONLY statement:
Instance - The name of the instance for the logic to fault. You may also use wildcards
such as asterisk (*) for the Instance name, for example INSTANCE < name /
wildcard name> IN CELL name.
For example, specifying FAULTONLY STATIC Instance a*c in CELL xyz will match
FAULTONLY STATIC Instance abc in CELL xyz (wildcard is allowed only for the
instance name, not the cell name).
October 2015 135 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
Block - The short or proper name of the hierarchical name of the block for the logic
of faults. Wildcards may be specified for the block name such as BLOCK <name/
wildcard name>. For example, BLOCK abc* will match BLOCK abcde, abcdef
etc.
Cell or Module - The name of the module with the logic for faults. You may specify
wildcards for the Cell name such as CELL <name/wildcard name>. For
example, CELL *z will match CELL xyz and CELL 123xyz.
Note: Wildcards represent one or more alphanumeric characters and are not case
sensitive. It is recommended not use wildcards for NOFAULT within FAULTONLY
blocks.
Module - Statement keyword that precedes a cell name. This can be specified in
mixed case.
Note: Cell and module are synonyms.
Block name - Identifies a specific hierarchical block in the Encounter Test
hierarchical model. This can be specified in both short and proper form of the block
name. If a name contains special characters, it must be specified within double
quotes.
Cell name - Identifies a specific library cell name. If a name contains special
characters, it must be specified within double quotes.
Instance name - Identifies a specific instance within a cell or module. If a name
contains special characters, it must be specified within double quotes.
NOFAULT can be used on modules and instances inside a FAULTONLY block to remove
faults inside the FAULTONLY block. If NOFAULT and FAULTONLY are specified on the
same block:
For CELL and INSTANCE in CELL, the last statement specified in the cell will win.
For an instance specific BLOCK, NOFAULT will override FAULTONLY, irrespective of
the order in which the statements are specified.
How to Code a Fault Rule File
Example 1: Using Normal Pattern Files
/* This is the fault rule file for lsrfhxx */
ENTITY = lsrfhxx /* this is specified up front */
/* Here are all the static pattern fault definitions... */
October 2015 136 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
Static {
"internal resistive short to ground" /* optional text */
Required /* required values */
{Net netone 0
Net nettwo 1
net three 1
}
Propagation { /* propagation value */
net three 1/0 /* fault effect */
}
}
STATIC { "internal pin zz01 not connected (open)"
REQ {
Pin a20 0
Net net2 1
}
PROP {
net three 0/1
} /* comment */
/* comment */
} /* comment */
/* Here are all the dynamic faults... */
Or {
/* the following two pattern faults represent one defect */
Dynamic {
"bridging fault between internal nodes X and Y"
Initial {
PIN a01 1
PIN a02 0
}
REQ {
PIN a01 1
PIN a02 1
PIN 02 1
}
PROP{ net abc 0/1 }
}
DYNAMIC {
INIT {
PIN a01 0
PIN a02 1
}
REQ {
PIN a01 1
PIN a02 1
PIN 02 1
}
PROP{ net abc 0/1 }
}
} /* end OR */
/* shorted nets... */
Short1 {
NET netone
NET nettwo
} /* end SHORT 1 */
October 2015 137 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
Short0 {
NET net3
NET net4
} /* end SHORT 0 */
IGNORE { SA0 PIN "block1.pin10" }
IGNORE { PATT fault10 BLOCK "block2.latch" }
PTAB { SA1 PIN "block2.pin3" }
Example 2: Removing Faults
NoFault Instance reset_reg_0 In Module sys_reset_block
NoFault Block dig_top.u_sys_reset_block.reset_reg_0
NoFault Cell SDFFRX1
NoFault Module SDFFRX1
Note: An entity name is not required at the top of the file
Example 3: Using a Fault Rule File
create_diag_tests_transition faultrulefile=<file with listed Instances and
blocks>
Example 4: Combining Nofault and Individual Pattern Fault Specifications
The following example shows how to combine user-defined fault specification and nofault
statement for a specific block. Note that the section for Entity=top should have both braces
{ and } before the nofault statement.
Entity=top {
IGNORE { SR PIN LOG.Dmux.SEL }
}
Nofault BLOCK Block.f.l.top.nl.COMPRESSION
Composite Fault Support
Composite faults can be simulated to correctly model complex faulty behavior. A composite
fault is a fault that has multiple behaviors. The behaviors are grouped such that the
components are dependent on each other.
October 2015 138 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
An illustration of a dependent composite fault is depicted in the partial design diagram in the
following figure.
Figure A-3 Dependent Composite Fault
In the preceding figure, Stuck Fault 1 is tested because Net D is at 1/0, but Net B is at 1/1 and
the output of the XOR gate is 0/1. Using the same argument, Stuck Fault 2 is also tested.
However, if you consider the composite fault where both Stuck Fault 1 and Stuck Fault 2 are
present at the same time, the composite fault is not tested when A=B=1. When both faults are
present, Net E becomes 0/0 and the composite fault is not detected.
Typically, the composite fault would be represented as a pattern fault:
OR {
STATIC{ ACTIVATION { NET B = 1 }
PROPAGATION { PIN OR.A1 - 1/0 }
}
STATIC{ ACTIVATION { NET B = 1 }
PROPAGATION { PIN XOR.A1 - 1/0 }
} }
Refer to Fault Compositing in the Encounter Test: Guide 7: Diagnostics for additional
information.
In Diagnostic Fault Isolation, specifying the General Purpose Simulation option
composite=yes creates OR'ed pattern groups then simulates the groups as composite
faults.
October 2015 139 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
Creating Bridge Fault Definitions
Bridge fault model can be created using the build_bridge_faultmodel command.
Specifying Bridge Faults in a Fault Rule File
Static and dynamic bridge faults can be specified in the fault rule file as shown in the Fault
Rule File Syntax section above. BRG_ indicates a bridge fault is to be created, the S, D, or SD
after the underscore indicates whether Static, Dynamic, or both Static and Dynamic bridge
faults are to be created between the specified nets or pins.
Refer to Table Table 6-1 on page 102 and Table 6-2 on page 103 for the faults created using
the given definitions.
Example:
ENTITY = module2
{
BRG_S { NET net01 NET net02 }
}
Creating Shorted Net Fault Definitions
Shorted Net Faults can be created using the create_shorted_net_faults command.
Specifying a Shorted Net Fault in a Fault Rule File
A shorted net fault can be specified in a Encounter Test fault rule file using one of the following
methods:
1. The first is "SHORT0 NET=xyz NET=asdf". This specification in the fault rule file creates
two pattern faults in the Encounter Test fault model, with the specification of an OR to
group the patterns together. In effect, the "SHORT0" specification is a short way of writing
a full two-pattern ORed pattern fault.
2. A "SHORT1" specification is also a short way of writing two ORed pattern faults in the
Encounter Test fault model. The SHORT0 specification describes a bridged net where the
bridge acts like an AND gate. A SHORT1 specification describes a bridged net where the
bridge acts like an OR gate.
3. Other kinds of behavior caused by shorted nets, such as a dominant net short, which
cannot be described with the SHORT specification, require that you write the full
October 2015 140 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
specification of the two pattern faults in the Encounter Test fault rule file. The following
table demonstrates this point for shorting two nets, A and B.
4. Use the command create_shorted_net_faults. Refer to Creating Shorted Net
Fault Definitions.
Fault Rule File Equivalent Pattern Fault Fault Model
SHORT0{NET A NET B} OR{ Fault Index
STATIC { "Net A=0 forces Net B=0" 1 SPAT at
REQUIRED {NET A=0 NET B=1} net B
PROPAGATION {NET B=1/0}
Fault Index
}
2 SPAT at
STATIC {"Net B=0 forces Net A=0"
net A
REQUIRED {NET A=1 NET B=0}
PROPAGATION {NET A=1/0}
}
}
SHORT1{NET A NET B} OR { Fault Index
STATIC {"Net A=1 forces Net B=1" 3 SPAT at
REQUIRED {NET A=1 NET B=0} net B
PROPAGATION {NET B=0/1}
}
Fault Index
STATIC {"Net B=1 forces Net A=1"
4 SPAT at
REQUIRED {NET A=0 NET B=1}
net A
PROPAGATION {NET A=0/1}
}
}
October 2015 141 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
Fault Rule File Equivalent Pattern Fault Fault Model
OR{ Same as fault rule file Fault Index
STATIC {"Net A=1 specification 5 SPAT at
Dominates Net B=0" net B
REQUIRED {NET A=1 NET
B=0}
Fault Index
PROPAGATION { NET B=0/
6 SPAT at
1}
net B
}
STATIC {"Net A=0
Dominates Net B=1"
REQUIRED {NET A=0 NET
B=1}
PROPAGATION { NET B=1/
0}
}
}
To simulate the effects of the "SHORT1" from a fault rule file, you must specify "gmach=3,4"
when resimulating the patterns in order to get the full effect of the shorted net. You must
specify both components of the ORed pattern fault.
Using Create Shorted Net Command
Faults may be automatically defined to model shorted net defects using the command
create_shorted_net_faults. This command uses an input list of net pairs and
generates a set of shorted net faults. The resulting output file can then be used as fault rule
input to Build Fault Model.
To view the command parameters, refer to create_shorted_net_faults in the Encounter
Test: Reference: Commands.
An example of the create_shorted_net_faults command is shown below:
create_shorted_net_faults cellname=moduleA outputfile=moduleA_flts \
filename=netpairfile
The following is a sample of a simple net pair file:
THE_REG_FILE.n_44 THE_REG_FILE.n_2403
THE_REG_FILE.n_4156 THE_REG_FILE.n_2403
THE_REG_FILE.n_88 THE_REG_FILE.n_2403
October 2015 142 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
Net-Pair File Syntax
The following is an example of the syntax for each line of the net-pair file:
static fault spec dynamic fault spec netname1 netname2 ...
The static and dynamic fault specs are optional. The specified keyword values for
create_shorted_net_faults indicate a static or dynamic fault spec for a net pair not
associated with any specific fault spec.
Encounter Test supports the following static faults:
staticOr Short1 of net1 with net2
staticAnd Short0 of net1 with net2
staticBoth Short1 and Short0 of net1 with net2 - 2 fault definitions. This
fault type only cannot specify more than two nets.
staticDom net1 dominates net2 - ORed pattern faults. This fault type can
specify more than two nets.
staticDomBoth net1 dominates net2 and net2 dominates net1 - 2 sets of ORed
faults. This fault type is the default for static faults.
staticAll staticBoth and staticDomBoth between net1 and net2
split This optional modifier indicates individual components are not
defined as ORed pattern faults.
Encounter Test supports the following dynamic faults:
delayOr net1 is slow to fall if net2 is 1 and vice versa - ORed
delayAnd net1 is slow to rise if net2 is 0 and vice versa - ORed
delayBoth Both delayOr and delayAnd. This fault type cannot specify
more than two nets.
delayDom net1 makes net2 slow to get to the opposite value - ORed. This
fault type can specify more than two nets.
delayDomBoth Both net1 dominates net2 and net2 dominates net1
delay Creates the delay version of the defined static fault spec. This
fault type is the default for dynamic faults.
delayAll delayBoth and delayDomBoth between net1 and net2
delayTrans Transition on net1 slows net2 for opposite trans - ORed. This
fault type can specify more than two nets.
October 2015 143 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
delayTransBoth Both net1 trans slow net2 and net2 trans slow net1
split This optional modifier indicates individual components are not
defined as ORed pattern faults.
Note: Net names may be coded with single or double quotes to avoid confusion with a fault
specification.
Fault Rule File Output
The following table shows examples of lines from an input net-pair file and the associated
output fault rule definitions.
Input File Line Resulting Output
staticOr netA netB Short1 { Net "netA" Net "netB" }
staticAnd netA netB Short0 { Net "netA" Net "netB" }
staticBoth netA netB Short0 { Net "netA" Net "netB" }
Short1 { Net "netA" Net "netB" }
staticDom netA netB OR{
Static{
"dominant short"
REQ { Net "netA"=0 Net "netB"=1/X }
PROP { Net "netB"=1/0 }
}
Static{
"dominant short"
REQ { Net "netA"=1 Net "netB"=0/X }
PROP { Net "netB"=0/1 }
}
}
October 2015 144 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
Input File Line Resulting Output
staticDomBoth netA netB AND{
Static{
"dominant short"
REQ { Net "netA"=0 Net "netB"=1/X }
PROP { Net "netB"=1/0 }
}
Static{
"dominant short"
REQ { Net "netA"=1 Net "netB"=0/X }
PROP { Net "netB"=0/1 }
}
Static{
"dominant short"
REQ { Net "netB"=0 Net "netA"=1/X }
PROP { Net "netA"=1/0 }
}
Static{
"dominant short"
REQ { Net "netB"=1 Net "netA"=0/X }
PROP { Net "netA"=0/1 }
}
}
staticAll netA netB Short0 { Net "netA" Net "netB" }
Short1 { Net "netA" Net "netB" }
AND{
Static{
"dominant short"
REQ { Net "netA"=0 Net "netB"=1/X }
PROP { Net "netB"=1/0 }
}
Static{
"dominant short"
REQ { Net "netA"=1 Net "netB"=0/X }
PROP { Net "netB"=0/1 }
}
Static{
"dominant short"
REQ { Net "netB"=0 Net "netA"=1/X }
PROP { Net "netA"=1/0 }
}
Static{
"dominant short"
REQ { Net "netB"=1 Net "netA"=0/X }
PROP { Net "netA"=0/1 }
}
}
October 2015 145 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
Input File Line Resulting Output
staticDom Split netA netB Static{
"dominant short"
REQ { Net "netA"=0 Net "netB"=1/X }
PROP { Net "netB"=1/0 }
}
Static{
"dominant short"
REQ { Net "netA"=1 Net "netB"=0/X }
PROP { Net "netB"=0/1 }
}
delayAnd netA netB OR {
Dynamic {
"Delay short 0"
INIT { Net "netB"=0 }
REQ { Net "netA"=0 Net "netB"=1/X }
PROP { Net "netB"=1/0 }
}
Dynamic {
"Delay short 0"
INIT { Net "netA"=0 }
REQ { Net "netA"=1/X Net "netB"=0 }
PROP { Net "netA"=1/0 }
}
}
delayOr netA netB OR {
Dynamic {
"Delay short 1"
INIT { Net "netB"=1 }
REQ { Net "netA"=1 Net "netB"=0/X }
PROP { Net "netB"=0/1 }
}
Dynamic {
"Delay short 1"
INIT { Net "netA"=1 }
REQ { Net "netA"=0/X Net "netB"=1 }
PROP { Net "netA"=0/1 }
}
}
October 2015 146 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
Input File Line Resulting Output
delayBoth netA netB OR {
Dynamic {
"Delay short 0"
INIT { Net "netB"=0 }
REQ { Net "netA"=0 Net "netB"=1/X }
PROP { Net "netB"=1/0 }
}
Dynamic {
"Delay short 0"
INIT { Net "netA"=0 }
REQ { Net "netA"=1/X Net "netB"=0 }
PROP { Net "netA"=1/0 }
}
}
OR {
Dynamic {
"Delay short 1"
INIT { Net "netB"=1 }
REQ { Net "netA"=1 Net "netB"=0/X }
PROP { Net "netB"=0/1 }
}
Dynamic {
"Delay short 1"
INIT { Net "netA"=1 }
REQ { Net "netA"=0/X Net "netB"=1 }
PROP { Net "netA"=0/1 }
}
}
delayDom netA netB OR {
Dynamic {
"Delay dominant short"
INIT { Net "netB"=0 }
REQ { Net "netA"=0 Net "netB"=1/X }
PROP { Net "netB"=1/0 }
}
Dynamic {
"Delay dominant short"
INIT { Net "netB"=1 }
REQ { Net "netA"=1 Net "netB"=0/X }
PROP { Net "netB"=0/1 }
}
}
October 2015 147 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
Input File Line Resulting Output
delayDomBoth netA netB OR {
Dynamic {
"Delay dominant short"
INIT { Net "netA"=0 Net "netB"=0 }
REQ { Net "netA"=0 Net "netB"=1/X }
PROP { Net "netB"=1/0 }
}
Dynamic {
"Delay dominant short"
INIT { Net "netA"=1 Net "netB"=1 }
REQ { Net "netA"=1 Net "netB"=0/X }
PROP { Net "netB"=0/1 }
}
}
OR {
Dynamic {
"Delay dominant short"
INIT { Net "netB"=0 Net "netA"=0 }
REQ { Net "netB"=0 Net "netA"=1/X }
PROP { Net "netA"=1/0 }
}
Dynamic {
"Delay dominant short"
INIT { Net "netB"=0 Net "netA"=1 }
REQ { Net "netB"=1 Net "netA"=0/X }
PROP { Net "netA"=0/1 }
}
}
delayDom Split netA netB Dynamic {
"Delay dominant short"
INIT { Net "netB"=0 }
REQ { Net "netA"=0 Net "netB"=1/X }
PROP { Net "netB"=1/0 }
}
Dynamic {
"Delay dominant short"
INIT { Net "netB"=1 }
REQ { Net "netA"=1 Net "netB"=0/X }
PROP { Net "netB"=0/1 }
}
October 2015 148 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
Input File Line Resulting Output
delayAll netA netB OR {
Dynamic {
"Delay short 0"
INIT { Net "netB"=0 }
REQ { Net "netA"=0 Net "netB"=1/X }
PROP { Net "netB"=1/0 }
}
Dynamic {
"Delay short 0"
INIT { Net "netA"=0 }
REQ { Net "netA"=1/X Net "netB"=0 }
PROP { Net "netA"=1/0 }
}
}
OR {
Dynamic {
"Delay short 1"
INIT { Net "netB"=1 }
REQ { Net "netA"=1 Net "netB"=0/X }
PROP { Net "netB"=0/1 }
}
Dynamic {
"Delay short 1"
INIT { Net "netA"=1 }
REQ { Net "netA"=0/X Net "netB"=1 }
PROP { Net "netA"=0/1 }
}
}
AND {
Dynamic {
"Delay dominant short"
INIT { Net "netA"=0 Net "netB"=0 }
REQ { Net "netA"=0 Net "netB"=1/X }
PROP { Net "netB"=1/0 }
}
Dynamic {
"Delay dominant short"
INIT { Net "netA"=1 Net "netB"=1 }
REQ { Net "netA"=1 Net "netB"=0/X }
PROP { Net "netB"=0/1 }
}
}
OR {
Dynamic {
"Delay dominant short"
INIT { Net "netB"=0 Net "netA"=0 }
REQ { Net "netB"=0 Net "netA"=1/X }
PROP { Net "netA"=1/0 }
}
Dynamic {
"Delay dominant short"
INIT { Net "netB"=1 Net "netA"=1 }
REQ { Net "netB"=1 Net "netA"=0/X }
PROP { Net "netA"=0/1 }
}
}
October 2015 149 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
Input File Line Resulting Output
delayTrans netA netB OR {
Dynamic {
"Delay transition interference"
INIT { Net "netA"=1 Net "netB"=0 }
REQ { Net "netA"=0 Net "netB"=1/X }
PROP { Net "netB"=1/0 }
}
Dynamic {
"Delay transition interference"
INIT { Net "netA"=0 Net "netB"=1 }
REQ { Net "netA"=1 Net "netB"=0/X }
PROP { Net "netB"=0/1 }
}
}
delayTransBoth netA netB OR {
Dynamic {
"Delay transition interference"
INIT { Net "netA"=1 Net "netB"=0 }
REQ { Net "netA"=0 Net "netB"=1/X }
PROP { Net "netB"=1/0 }
}
Dynamic {
"Delay transition interference"
INIT { Net "netA"=0 Net "netB"=1 }
REQ { Net "netA"=1 Net "netB"=0/X }
PROP { Net "netB"=0/1 }
}
}
OR {
Dynamic {
"Delay transition interference"
INIT { Net "netB"=1 Net "netA"=0 }
REQ { Net "netB"=0 Net "netA"=1/X }
PROP { Net "netA"=1/0 }
}
Dynamic {
"Delay transition interference"
INIT { Net "netB"=0 Net "netA"=1 }
REQ { Net "netB"=1 Net "netA"=0/X }
PROP { Net "netA"=0/1 }
}
}
October 2015 150 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
Input File Line Resulting Output
delayTrans netA netB netC OR {
Dynamic {
"Delay transition interference"
INIT { Net "netA"=1 Net "netB"=1 Net "netC"=0 }
REQ { Net "netA"=0 Net "netB"=0 Net "netC"=1/X }
PROP { Net "netC"=1/0 }
}
Dynamic {
"Delay transition interference"
INIT { Net "netA"=0 Net "netB"=0 Net "netC"=1 }
REQ { Net "netA"=1 Net "netB"=1 Net "netC"=0/X }
PROP { Net "netC"=0/1 }
}
}
staticDom delay netA netB OR{
Static{
"dominant short"
REQ { Net "netA"=0 Net "netB"=1/X }
PROP { Net "netB"=1/0 }
}
Static{
"dominant short"
REQ { Net "netA"=1 Net "netB"=0/X }
PROP { Net "netB"=0/1 }
}
}
OR {
Dynamic {
"Delay dominant short"
INIT { Net "netB"=0 }
REQ { Net "netA"=0 Net "netB"=1/X }
PROP { Net "netB"=1/0 }
}
Dynamic {
"Delay dominant short"
INIT { Net "netB"=1 }
REQ { Net "netA"=1 Net "netB"=0/X }
PROP { Net "netB"=0/1 }
}
}
October 2015 151 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Pattern Faults and Fault Rules
Input File Line Resulting Output
netA netB AND{
Static{
"dominant short"
Command line options: REQ { Net "netA"=0 Net "netB"=1/X }
defaultStatic=staticDomBoth PROP { Net "netB"=1/0 }
}
defaultDelay=delay split=no Static{
"dominant short"
REQ { Net "netA"=1 Net "netB"=0/X }
PROP { Net "netB"=0/1 }
}
Static{
"dominant short"
REQ { Net "netB"=0 Net "netA"=1/X }
PROP { Net "netA"=1/0 }
}
Static{
"dominant short"
REQ { Net "netB"=1 Net "netA"=0/X }
PROP { Net "netA"=0/1 }
}
}
AND {
Dynamic {
"Delay dominant short"
INIT { Net "netA"=0 Net "netB"=0 }
REQ { Net "netA"=0 Net "netB"=1/X }
PROP { Net "netB"=1/0 }
}
Dynamic {
"Delay dominant short"
INIT { Net "netA"=1 Net "netB"=1 }
REQ { Net "netA"=1 Net "netB"=0/X }
PROP { Net "netB"=0/1 }
}
}
OR {
Dynamic {
"Delay dominant short"
INIT { Net "netB"=0 Net "netA"=0 }
REQ { Net "netB"=0 Net "netA"=1/X }
PROP { Net "netA"=1/0 }
}
Dynamic {
"Delay dominant short"
INIT { Net "netB"=1 Net "netA"=1 }
REQ { Net "netB"=1 Net "netA"=0/X }
PROP { Net "netA"=0/1 }
}
}
October 2015 152 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
B
Hierarchical Fault Processing Flow
This is a flow for taking faults tested at the core level out of consideration when the 1500
wrapped cores are used on an SOC
Core Level Flow
At the core level the following steps are run for each 1500 wrapped core to be placed on the
SOC.
Figure B-1 Core Level Flow
1. Build Model run build_model with the options you normally use
October 2015 153 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Hierarchical Fault Processing Flow
2. Build and Verify INTEST Testmode run build_testmode with a mode definition file
that includes Scan_type gsd boundary=internal
3. Build the fault model including ignorefaults in the fault statistics run
build_faultmodel ignorefaultstatistics=yes includeignore=yes
4. Create and Commit scanchain and logic tests using the following command lines:
create_scanchain_tests testmode=INTEST experiment=srt
commit_tests testmode=INTEST inexperiment=srt
create_logic_tests testmode=INTEST experiment=tg1
commit_tests testmode=INTEST inexperiment=tg1
5. Prepare Detected Faults run prepare_detected_faults testmode=INTEST
outfaultfile=corefile# (where # is an arbitrary number to make the corefiles
unique)
SOC Level Flow
At the SOC level the following steps are run to include each 1500 wrapped core.
October 2015 154 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Hierarchical Fault Processing Flow
Figure B-2 SOC Level Flow
1. Build Model run build_model with your normal options; instead of pointing to Verilog
for the core, you may point to the tbdata/hierModel2 for the core. This is somewhat faster
than parsing the Verilog and ensures that the source is exactly what was used for ATPG.
2. Build and Verify SOC testmode with cores configured in EXTEST mode run
build_testmode and then verify_test_structures using your normal options
and an assignfile that configures the testmode into EXTEST mode.
3. Build Fault modelcreate a file named allcores.files that lists the location of the corefile#
from prepare_detected_faults on each testmode one per line with no punctuation.
Then build_faultmodel faultrulefile=allcores.files
ignorefaultstatistics=yes includeignore=yes
4. Create and Commit Scanchain and Logic Tests for SOC.
create_scanchain_tests testmode=SOC experiment=srt
commit_tests testmode=SOC inexperiment=srt
create_logic_tests testmode=SOC experiment=tg1
commit_tests testmode=SOC inexperiment=tg1
October 2015 155 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Hierarchical Fault Processing Flow
5. Report Fault Statistics run report_fault_statistics testmode=SOC
hierstart=top hierend=n (where n is the number of levels down from the top
required to print the core level statistics)
October 2015 156 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
C
Building Register Array and Random
Resistant Fault List Files for Pattern
Compaction
As designs grow larger, various techniques are employed by Encounter Test to reduce pattern
counts. The command prepare_faultmodel_analysis can be used to identify large
register arrays, also known as low-power registers, and identify special random pattern
resistant structures. The benefit of the analysis is that faults that can be tested using the same
write or read port address can be merged into a single test. When combined with test
generation compaction options, a reduction in test pattern counts for large designs with arrays
is possible.
The register array and random fault list files can also be produced as part of the Build Fault
Model process by selecting the screen options to Identify random resistant faults and
Identify register array faults, or via the command line by specifying build_faultmodel
keywords randomresistant=yes and registerarray=yes.
To prepare fault model analysis, refer to prepare_faultmodel_analysis in the Encounter
Test: Reference: Commands. The syntax for the command is shown below:
prepare_faultmodel_analysis WORKDIR=<directory>
where workdir is the name of the working directory.
Input Files
Encounter Test model from build_model.
If using prepare_faultmodel_analysis to generate these lists of faults, a fault
model must exist from build_faultmodel.
Output Files
Two sets of data are produced in the tbdata directory:
October 2015 157 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Building Register Array and Random Resistant Fault List Files for Pattern Compaction
registerArrayList is produced if analysis is performed for register arrays.
resistantFaultList is produced if analysis is performed for random resistant faults.
These are optional inputs to Logic Test Generation and IDDq Test Generation. Use the
following command line syntax to use this data:
create_logic_tests workdir=mywd testmode=FULLSCAN experiment=stg1
randomresistant=yes registerarray=yes
create_logic_delay_tests workdir=mywd testmode=FULLSCAN experiment=dtg1
randomresistant=yes registerarray=yes
create_iddq_tests workdir=mywd testmode=FULLSCAN experiment=itg1
randomresistant=yes registerarray=yes
October 2015 158 Product Version 15.12
1999-2015 All Rights Reserved.
Encounter Test: Guide 4: Faults
Index
A dynamic pattern faults 98, 116
dynamic pin faults 98
active faults 108
analyze faults
input files 75, 77 F
overview 76
performing 74 fault
restrictions 74 driver/receiver 101
analyze random resistance dynamic pattern 98
concepts 80, 91 dynamic pin 98
input files 80 fault models 115
inserting test points 84 pattern 93
performing 91 pattern, shorted net 98
test points 82 possibly testable at best 107
analyzing race conditions with MEG slow-to-disable 120
rrfa 82 stuck driver 119
types 91
fault analysis
C deterministic 76
overview 69
circuit values, viewing 94 process 69
CO (controllability/observability) fault list and fault subset
analysis 78 reading and creating 36
comets fault model
cross-mode markoff 116, 117 creating 15
overview 116 fault rule file elements 128
statistics-only 117 fault rule file example 136
composite fault 138 fault rule file, specifying shorted net
compound fault 138 fault 140
concepts fault types 91
analyze random resistance 80, 91 driver/receiver objectives 101
fault analysis 69 dynamic pattern 98
testability measurements 76 dynamic pin 98
controllability/observability (CO) shorted nets 98
analysis 78 slow-to-disable objectives 120
create a fault model static pattern 93
output files 17 static pin 91
customer service, contacting 13 stuck driver and shorted net
objectives 119
fault-free AND gate 92
D faults
dynamic pattern 116
detected faults file 42 pattern 116
diagnostics procedure pin 116
composite faults 138 shorted net 116
driver/receiver objectives 101 static pattern 116
October 2015 159 Product Version 15.12
Encounter Test: Guide 4: Faults
stuck-at 92
stuck-At faults 116
P
transition 116 pattern fault 93
pattern faults 116
pin faults 116
G possible value set (PVS) 78
possibly testable at best faults 107
global attributes PTAB (possibly testable at best) faults 107
possibly testable at best (PTAB) 107 PVS (possible value set) 78
global term 0 112
H R
read fault list and create fault subset
help, accessing 13 input files 37
manually created input 38
output files 39
I output from view fault list 37
removing scan faults from consideration
ignore faults file 40 overview 40
inactive faults 108
L S
S-A-1 AND gate 92
latch tracing 79 scan faults 40
linehold 111 removing from consideration 40
sequential conflict 112
sequential depth 79
M shorted net faults 116
shorted net faults, creating 140
message analysis, interactive shorted nets pattern fault 98
single port latch 97
slow-to-disable objectives 120
N static pattern faults 116
stuck driver and shorted net objectives 101
newlink gui_tfahints 75 stuck driver objectives 119
newlink uxs 111 stuck-At faults 116
non-contacted pin stuck-at faults 92
sequential conflict 112
O T
test points
objectives recommendations 82
driver/receiver test points, inserting 84
slow-to-disable 120 testability measurements
stuck driver 119 controllability/observability 78
stuck driver and shorted net 119 latch tracing 79
overview 76
October 2015 160 Product Version 15.12
Encounter Test: Guide 4: Faults
performing 77
possible value set (PVS) 78
sequential depth 79
tg state 112
tracing, latch 79
transition faults 116
U
untestable faults
global term 0 112
linehold 111
sequential conflict 112
testable domain 112
tg state 112
using Encounter Test
online help 13
W
write detected faults file
output file
write ignore faults file
creating 40
X
x-source 111
October 2015 161 Product Version 15.12
Encounter Test: Guide 4: Faults
October 2015 162 Product Version 15.12
You might also like
- Mil PRF 46010FDocument20 pagesMil PRF 46010FSantaj Technologies100% (1)
- AMBA Transactors User and Reference Guide: Product Version 5.4 May 2005Document170 pagesAMBA Transactors User and Reference Guide: Product Version 5.4 May 2005Pardhasaradhi DamarlaNo ratings yet
- EC 5.network TheoryDocument262 pagesEC 5.network TheoryNagmani KumarNo ratings yet
- OVM UserGuideDocument164 pagesOVM UserGuidevkaleshwarNo ratings yet
- Guidance for Processing SushiDocument24 pagesGuidance for Processing SushigsyaoNo ratings yet
- Graphics Processing Unit Seminar ReportDocument31 pagesGraphics Processing Unit Seminar ReportShashi Kushwaha0% (1)
- AVMSVI-04 - Automating Testbench Tasks With TCLDocument26 pagesAVMSVI-04 - Automating Testbench Tasks With TCLGurinder Pal SinghNo ratings yet
- LowPower RefDocument596 pagesLowPower RefBaluvu JagadishNo ratings yet
- PCI System Architecture (4th Edition)Document177 pagesPCI System Architecture (4th Edition)techbooks b100% (1)
- Cadence Corners AnalysisDocument218 pagesCadence Corners AnalysisHoang NguyenNo ratings yet
- Icc 2 DPDocument440 pagesIcc 2 DPAgnathavasiNo ratings yet
- M 05 BIST0504Document90 pagesM 05 BIST0504Darshan HarishNo ratings yet
- Lab 3 - Top-Down ASIC Design With DFTDocument16 pagesLab 3 - Top-Down ASIC Design With DFTVeeranjaneyulu DhikondaNo ratings yet
- VC SpyGlass CDC Quick Start GuideDocument28 pagesVC SpyGlass CDC Quick Start Guideworkat60474No ratings yet
- DFT REPORT FOR SEQUENCE DETECTORDocument11 pagesDFT REPORT FOR SEQUENCE DETECTORShravan KumarNo ratings yet
- ATPG Flow DocumentDocument27 pagesATPG Flow DocumentNitish KumarNo ratings yet
- Logic Synthesis Using Cadence Genus Tool Optimized DesignDocument6 pagesLogic Synthesis Using Cadence Genus Tool Optimized DesignSiam HasanNo ratings yet
- Pratt & Whitney Engine Training ResourcesDocument5 pagesPratt & Whitney Engine Training ResourcesJulio Abanto50% (2)
- 6199026M2 Pre Powershift and Synchro Shuttle TX750 TX760 TX860Document394 pages6199026M2 Pre Powershift and Synchro Shuttle TX750 TX760 TX860Gustavo100% (7)
- Ostrich RC CorrelationDocument41 pagesOstrich RC CorrelationSrinivas Krishna100% (1)
- Static Timing AnalysisDocument54 pagesStatic Timing AnalysisPraveen Ramesh KarnamNo ratings yet
- ETVerifyReference PDFDocument636 pagesETVerifyReference PDFKIRAN K SNo ratings yet
- DFTC1 2007.12 LabGuide-đã Chuyển ĐổiDocument123 pagesDFTC1 2007.12 LabGuide-đã Chuyển Đổihung nguyenNo ratings yet
- ABC DFT Flow 002Document86 pagesABC DFT Flow 002Nitish KumarNo ratings yet
- DFT QuestionsDocument8 pagesDFT QuestionsTarun g100% (1)
- User Manual FotonaDocument103 pagesUser Manual Fotonarasheeque100% (3)
- XG Mode: User GuideDocument176 pagesXG Mode: User GuideDavid FongNo ratings yet
- SyntutDocument182 pagesSyntutThomaselvaNo ratings yet
- Et Ug PmbistDocument40 pagesEt Ug PmbistNitish KumarNo ratings yet
- Cadence DatasheetDocument1,327 pagesCadence DatasheetSujit KumarNo ratings yet
- CADENCE Sim Compare User MANUAL AND TCL COMMANDSDocument78 pagesCADENCE Sim Compare User MANUAL AND TCL COMMANDSSakthi VelanNo ratings yet
- Eetop - CN FPR 10 1.labDocument162 pagesEetop - CN FPR 10 1.labMohammed El-AdawyNo ratings yet
- Auto UserDocument358 pagesAuto UserRamNo ratings yet
- CPF RefDocument334 pagesCPF RefThi NguyenNo ratings yet
- XCELIUM BASIC Vs ADVANCED PROFILERDocument9 pagesXCELIUM BASIC Vs ADVANCED PROFILERPriya JeejoNo ratings yet
- Debugging Techniques for Mixed-Signal AMS SimulationsDocument28 pagesDebugging Techniques for Mixed-Signal AMS SimulationsarunsrlNo ratings yet
- Low-Power and Compact SAR ADC for BiosensorsDocument81 pagesLow-Power and Compact SAR ADC for Biosensorshansraj4u4800No ratings yet
- Cadence TutorialDocument24 pagesCadence TutorialVENKINo ratings yet
- 1 DFT Coding RulesDocument22 pages1 DFT Coding RulesKshitij GurjarNo ratings yet
- QRC Extraction DsDocument5 pagesQRC Extraction DsLakshman YandapalliNo ratings yet
- VLSI II: Power Distribution Analysis of an AES-128 Encryption CoreDocument13 pagesVLSI II: Power Distribution Analysis of an AES-128 Encryption CoreSiam HasanNo ratings yet
- Danny Yoo ThesisDocument108 pagesDanny Yoo ThesisKarthikeyan GunasekaranNo ratings yet
- Scan Chain ReorderDocument48 pagesScan Chain ReorderPrasanna KumarNo ratings yet
- Cadence TutorialDocument49 pagesCadence Tutorialrakheep123No ratings yet
- Asic Design Flow Tutorial 3228glDocument138 pagesAsic Design Flow Tutorial 3228glMahesh Reddy MandapatiNo ratings yet
- How To Use DFTDocument43 pagesHow To Use DFTMattNo ratings yet
- SpectreRF OhioDocument110 pagesSpectreRF OhioPratap P PratapNo ratings yet
- Gate-Level Simulation of GCD Circuit using Synopsys VCSDocument5 pagesGate-Level Simulation of GCD Circuit using Synopsys VCSVijay Kumar NNo ratings yet
- Encounter Library Characterizer User Guide: Product Version 12.0 December 2012Document212 pagesEncounter Library Characterizer User Guide: Product Version 12.0 December 2012SriramNaiduGorleNo ratings yet
- SVM ManualDocument224 pagesSVM Manualpinakin4u0% (2)
- BSDXG PDFDocument238 pagesBSDXG PDFjeevithpaulNo ratings yet
- Ece5745 Tut2 DCDocument15 pagesEce5745 Tut2 DCMisbahNo ratings yet
- Typical ASIC design flow synthesis constraintsDocument134 pagesTypical ASIC design flow synthesis constraintsMark Ting-Min LinNo ratings yet
- Ezwave UrDocument738 pagesEzwave Urshakespirit100% (1)
- 7 SeriesDocument416 pages7 SeriesEswaran SamyNo ratings yet
- Pre Final Sem Project ReportDocument79 pagesPre Final Sem Project Reportapi-301719207No ratings yet
- Calibre xRC Parasitic Extraction Student WorkbookDocument14 pagesCalibre xRC Parasitic Extraction Student WorkbookBai Nguyen NoiNo ratings yet
- Checker BoardDocument9 pagesChecker BoardJoseph JohnNo ratings yet
- Monte Carlo analysis of a current mirror circuitDocument7 pagesMonte Carlo analysis of a current mirror circuitSougata GhoshNo ratings yet
- EdabasicsDocument55 pagesEdabasicssivaganeshanNo ratings yet
- Physical Sinthesys Tutorial PDFDocument40 pagesPhysical Sinthesys Tutorial PDFRyuzakyNo ratings yet
- User GuideDocument592 pagesUser Guidebvnagesha17488No ratings yet
- VCMDocument522 pagesVCMSai Kumar NallagangulaNo ratings yet
- Cadence Virtuoso Spectre - Virtuoso - MmsimDocument12 pagesCadence Virtuoso Spectre - Virtuoso - MmsimParker333No ratings yet
- Lab 6 Introduction To VerilogDocument7 pagesLab 6 Introduction To Verilogmmorsy1981No ratings yet
- Application-Specific Integrated Circuit ASIC A Complete GuideFrom EverandApplication-Specific Integrated Circuit ASIC A Complete GuideNo ratings yet
- Affidavit for Adding Spouse Name to PassportDocument1 pageAffidavit for Adding Spouse Name to PassportNitish KumarNo ratings yet
- Customer Portal User Manual - 2020 MayDocument5 pagesCustomer Portal User Manual - 2020 MayNitish KumarNo ratings yet
- Shri Mata Vaishno Devi University: Entry - No Student - Name Cgpa SgpaDocument3 pagesShri Mata Vaishno Devi University: Entry - No Student - Name Cgpa SgpaNitish KumarNo ratings yet
- Shri Mata Vaishno Devi University: Entry - No Student - Name Cgpa SgpaDocument3 pagesShri Mata Vaishno Devi University: Entry - No Student - Name Cgpa SgpaNitish KumarNo ratings yet
- NIRF'2020' data of Shri Mata Vaishno Devi UniversityDocument18 pagesNIRF'2020' data of Shri Mata Vaishno Devi UniversityNitish KumarNo ratings yet
- Institute Name: Shri Mata Vaishno Devi University (IR-E-U-0201)Document7 pagesInstitute Name: Shri Mata Vaishno Devi University (IR-E-U-0201)Nitish KumarNo ratings yet
- USB in A NutShell PDFDocument33 pagesUSB in A NutShell PDFNitish KumarNo ratings yet
- 13.clock Stand07Document35 pages13.clock Stand07sckidNo ratings yet
- 13.clock Stand07Document35 pages13.clock Stand07sckidNo ratings yet
- NIRF'2020' Data for Shri Mata Vaishno Devi UniversityDocument14 pagesNIRF'2020' Data for Shri Mata Vaishno Devi UniversityNitish KumarNo ratings yet
- P1450.3 Ieee Standardtest Interface Language (Stil) Extension For Tester Resource Constraints (TRC)Document60 pagesP1450.3 Ieee Standardtest Interface Language (Stil) Extension For Tester Resource Constraints (TRC)Nitish KumarNo ratings yet
- CummingsSNUG2008Boston CDCDocument56 pagesCummingsSNUG2008Boston CDCKiran RaoNo ratings yet
- P1450.3 Ieee Standardtest Interface Language (Stil) Extension For Tester Resource Constraints (TRC)Document60 pagesP1450.3 Ieee Standardtest Interface Language (Stil) Extension For Tester Resource Constraints (TRC)Nitish KumarNo ratings yet
- Agoda BID332218533Document1 pageAgoda BID332218533Nitish KumarNo ratings yet
- Irctcs E-Ticketing Service Electronic Reservation Slip (Personal User)Document3 pagesIrctcs E-Ticketing Service Electronic Reservation Slip (Personal User)kumarNo ratings yet
- 04052019Document1 page04052019Avee YadavNo ratings yet
- Agoda BID332218533Document1 pageAgoda BID332218533Nitish KumarNo ratings yet
- Job Title: Applications Consultant - DFT Job Location: India - Bangalore Job Category: Sales Exp: 7 To 15 Years Job DutiesDocument2 pagesJob Title: Applications Consultant - DFT Job Location: India - Bangalore Job Category: Sales Exp: 7 To 15 Years Job DutiesNitish KumarNo ratings yet
- 16nm Metascan Dev PlanDocument11 pages16nm Metascan Dev PlanNitish KumarNo ratings yet
- ICB-2 Software Test Engineer: Job DescriptionDocument2 pagesICB-2 Software Test Engineer: Job DescriptionNitish KumarNo ratings yet
- Shri Mata Vaishno Devi University - EngineeringDocument7 pagesShri Mata Vaishno Devi University - EngineeringNitish KumarNo ratings yet
- Shri Mata Vaishno Devi University - EngineeringDocument7 pagesShri Mata Vaishno Devi University - EngineeringNitish KumarNo ratings yet
- Shree Nath Vyas: Internships EducationDocument1 pageShree Nath Vyas: Internships EducationNitish KumarNo ratings yet
- Photoshop For Beginners (A Video E-Book) - Learn The Basics of Photoshop To Become A Better Photographer4 PDFDocument5 pagesPhotoshop For Beginners (A Video E-Book) - Learn The Basics of Photoshop To Become A Better Photographer4 PDFNitish KumarNo ratings yet
- PMC 28nm I/O Usage GuidelinesDocument44 pagesPMC 28nm I/O Usage GuidelinesNitish KumarNo ratings yet
- Appellate Tribunal Inland Revenue Rules, 2010Document18 pagesAppellate Tribunal Inland Revenue Rules, 2010Shahbaz KhanNo ratings yet
- MATHS UNDERSTANDINGDocument15 pagesMATHS UNDERSTANDINGNurul IzzaNo ratings yet
- Pinto Pm2 Ch01Document21 pagesPinto Pm2 Ch01Mia KulalNo ratings yet
- Stakeholder Management Plan Case Study 1Document2 pagesStakeholder Management Plan Case Study 1Krister VallenteNo ratings yet
- June 3rd 1947 Partition PlanDocument2 pagesJune 3rd 1947 Partition PlanZ_Jahangeer88% (16)
- Activity 1: 2. Does His Homework - He S 3 Late ForDocument10 pagesActivity 1: 2. Does His Homework - He S 3 Late ForINTELIGENCIA EDUCATIVANo ratings yet
- SSC CGL Tier 2 Quantitative Abilities 16-Nov-2020Document17 pagesSSC CGL Tier 2 Quantitative Abilities 16-Nov-2020aNo ratings yet
- Internship 2021: BY: Shantanu Anil MehareDocument8 pagesInternship 2021: BY: Shantanu Anil MehareShantanu MehareNo ratings yet
- Artificial IntelligenceDocument1 pageArtificial IntelligenceTeresaNo ratings yet
- Eng CBLDocument2 pagesEng CBLMengTangNo ratings yet
- Smoochie Monsterpants: I Have Added My Pattern To RavelryDocument3 pagesSmoochie Monsterpants: I Have Added My Pattern To RavelryadinaNo ratings yet
- Sar Oumad Zemestoun v01b Music Score سر اومد زمستون، نت موسیقیDocument1 pageSar Oumad Zemestoun v01b Music Score سر اومد زمستون، نت موسیقیPayman Akhlaghi (پیمان اخلاقی)100% (3)
- Assessment - Lesson 1Document12 pagesAssessment - Lesson 1Charlynjoy AbañasNo ratings yet
- Geometry First 9 Weeks Test Review 1 2011Document6 pagesGeometry First 9 Weeks Test Review 1 2011esvraka1No ratings yet
- Talha Farooqi - Assignment 01 - Overview of Bond Sectors and Instruments - Fixed Income Analysis PDFDocument4 pagesTalha Farooqi - Assignment 01 - Overview of Bond Sectors and Instruments - Fixed Income Analysis PDFMohammad TalhaNo ratings yet
- TNT Construction PLC - Tender 3Document42 pagesTNT Construction PLC - Tender 3berekajimma100% (1)
- Shah Wali Ullah Syed Haji Shariat Ullah Ahmad Barelvi (Notes)Document2 pagesShah Wali Ullah Syed Haji Shariat Ullah Ahmad Barelvi (Notes)Samreen KapasiNo ratings yet
- HIstory of PerfumeDocument3 pagesHIstory of PerfumebetselevenNo ratings yet
- 2 Obligations General Provisions 1156 1162Document15 pages2 Obligations General Provisions 1156 1162Emanuel CenidozaNo ratings yet
- Ariston Oven ManualDocument16 pagesAriston Oven ManualJoanne JoanneNo ratings yet
- Conduct effective meetings with the right typeDocument5 pagesConduct effective meetings with the right typeRio AlbaricoNo ratings yet
- User Manual: Imagenet Lite™ SoftwareDocument93 pagesUser Manual: Imagenet Lite™ SoftwareDe Mohamed KaraNo ratings yet
- Tentative Quotation For Corporate Video (5 Minutes)Document2 pagesTentative Quotation For Corporate Video (5 Minutes)Lekha JauhariNo ratings yet
- Towards A Socially Responsible Management Control SystemDocument24 pagesTowards A Socially Responsible Management Control Systemsavpap78No ratings yet