You might also like
- EM 03 Haedrich Integrated Electric Motor Design Electromagnetics Cooling Acoustics Ansys Acum Wien 20150429Document35 pagesEM 03 Haedrich Integrated Electric Motor Design Electromagnetics Cooling Acoustics Ansys Acum Wien 20150429mohamedezeldinNo ratings yet
- EM 02 Lederer TU Wien Reliability Prediction For IGBT Modules Under Service ConditionsDocument18 pagesEM 02 Lederer TU Wien Reliability Prediction For IGBT Modules Under Service ConditionsmohamedezeldinNo ratings yet
- EM 01 Haedrich Electromechanical Update Ansys Acum Wien 20150429 1Document61 pagesEM 01 Haedrich Electromechanical Update Ansys Acum Wien 20150429 1mohamedezeldinNo ratings yet
- CADFEM Webinar Vibroakustik 20160317 SPEDocument32 pagesCADFEM Webinar Vibroakustik 20160317 SPEmohamedezeldinNo ratings yet
- Fluent Theory ManualDocument816 pagesFluent Theory Manualkarthik_deven100% (2)
- CFD 07 Grotjans Kainz ANSYS AIM-UpdateDocument8 pagesCFD 07 Grotjans Kainz ANSYS AIM-UpdatemohamedezeldinNo ratings yet
- CFD 06 Kainz ANSYS Instationaere Kopplung Von SchaufelreihenDocument40 pagesCFD 06 Kainz ANSYS Instationaere Kopplung Von SchaufelreihenmohamedezeldinNo ratings yet
- CFD 01 Grotjans ANSYS ANSYS 16.0 CFD Update Release Highlights-1Document33 pagesCFD 01 Grotjans ANSYS ANSYS 16.0 CFD Update Release Highlights-1mohamedezeldinNo ratings yet
- CFD 04 Pirker JKU Linz Numerical Simulation of Cyclone Separation-2Document25 pagesCFD 04 Pirker JKU Linz Numerical Simulation of Cyclone Separation-2mohamedezeldinNo ratings yet
- CFD 02 Jost Turboinstitut Improvement of Efficiency Prediction of Axial TurbinesDocument21 pagesCFD 02 Jost Turboinstitut Improvement of Efficiency Prediction of Axial TurbinesmohamedezeldinNo ratings yet
- 5 Modeling of Turbulent FlowsDocument49 pages5 Modeling of Turbulent FlowsAlex DanielNo ratings yet
- MeshingDocument54 pagesMeshingmohamedezeldinNo ratings yet
- Force AnalysisDocument1 pageForce AnalysismohamedezeldinNo ratings yet
- GearsDocument190 pagesGearsmohamedezeldinNo ratings yet
- Gear MotorsDocument86 pagesGear MotorsmohamedezeldinNo ratings yet
- Hybrid VIPDocument42 pagesHybrid VIPmohamedezeldinNo ratings yet
- VIP Cardan Vibrations PDFDocument25 pagesVIP Cardan Vibrations PDFmohamedezeldinNo ratings yet
- Addressing Gear Noise in Power Take-OffsDocument3 pagesAddressing Gear Noise in Power Take-OffsmohamedezeldinNo ratings yet
- Hybrid Powertrain SolutionsDocument27 pagesHybrid Powertrain SolutionsmohamedezeldinNo ratings yet
- Experimental study of friction in aluminium bolted jointsDocument3 pagesExperimental study of friction in aluminium bolted jointsmohamedezeldinNo ratings yet
- Series-Parallel Hybrid Design VIPDocument13 pagesSeries-Parallel Hybrid Design VIPmohamedezeldinNo ratings yet
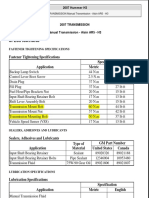
- Hummer H3 Manual TransmissionDocument369 pagesHummer H3 Manual TransmissionmohamedezeldinNo ratings yet
- Lower and Higher Heating Values of Gas Liquid and Solid FuelsDocument1 pageLower and Higher Heating Values of Gas Liquid and Solid FuelsNikunj PipariyaNo ratings yet
- Chris Mi HandoutDocument151 pagesChris Mi HandoutmohamedezeldinNo ratings yet
- Comparison Between Ev and Charge DepletingDocument11 pagesComparison Between Ev and Charge DepletingmohamedezeldinNo ratings yet
- Rolling ResistanceDocument64 pagesRolling Resistancemohamedezeldin100% (1)
- Parallel HybridDocument6 pagesParallel HybridmohamedezeldinNo ratings yet
- ANSYS Workbench-Fatigue-ModuleDocument31 pagesANSYS Workbench-Fatigue-ModulepodrowNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Applications of EngineDocument22 pagesApplications of EngineHari PrasadNo ratings yet
- Palm Oil Note 1Document88 pagesPalm Oil Note 1Chang Chee Hong89% (9)
- BA Generator PMG10 2 E PDFDocument30 pagesBA Generator PMG10 2 E PDFJuan Domingo OrlandiniNo ratings yet
- Dokumen - Tips - Sulzer 16 Zav 40 S Specification and Major Equipment List Model 16zav40 S 16zav40sDocument10 pagesDokumen - Tips - Sulzer 16 Zav 40 S Specification and Major Equipment List Model 16zav40 S 16zav40sshahar swissaNo ratings yet
- Lect FractionizationDocument57 pagesLect Fractionizationraja.mtNo ratings yet
- Toyota Etios Liva 478Document3 pagesToyota Etios Liva 478SouravSengupta0% (1)
- Multi-Engine Training PacketDocument21 pagesMulti-Engine Training PackettekinNo ratings yet
- Piston Cleaning Ring Sl2016-620Document2 pagesPiston Cleaning Ring Sl2016-620Parthiban Nagarajan100% (1)
- Sebu6400-05 - Cat Gas EngineDocument48 pagesSebu6400-05 - Cat Gas EnginetamailhamNo ratings yet
- Q and A For 2 Marks New Thermal EngineeringDocument43 pagesQ and A For 2 Marks New Thermal EngineeringPaul Arokiam S0% (1)
- Engine Number GuideDocument4 pagesEngine Number GuideMksreekanthMkNo ratings yet
- Dec-2019 P TDocument60 pagesDec-2019 P TmaheshgupteNo ratings yet
- Manual TAS85 Poppet SettingDocument4 pagesManual TAS85 Poppet SettingNoeRtjahya AhmadNo ratings yet
- FC 115Document6 pagesFC 115Alexander LopezNo ratings yet
- Kobelco 7250-2F PDFDocument12 pagesKobelco 7250-2F PDFDaryanto GultomNo ratings yet
- Kipor KGE2000 Operation ManualDocument21 pagesKipor KGE2000 Operation ManualMartin Sørensen60% (5)
- tAD1341/1342/1343ge-B: 308/343/366 KW (419/466/498 HP) at 1500 RPM, 335/395/406 KW (456/537/552 HP) at 1800 RPMDocument2 pagestAD1341/1342/1343ge-B: 308/343/366 KW (419/466/498 HP) at 1500 RPM, 335/395/406 KW (456/537/552 HP) at 1800 RPMMOAMMEDNo ratings yet
- R. K. Rajput - A Textbook of Power Plant Engineering-Laxmi Publications PVT LTD (2016)Document740 pagesR. K. Rajput - A Textbook of Power Plant Engineering-Laxmi Publications PVT LTD (2016)Anonymous dIhhKA100% (3)
- DgenDocument8 pagesDgenKevin RichardNo ratings yet
- Chem InaayaDocument3 pagesChem InaayainaayaNo ratings yet
- Hydrotest PackageDocument2 pagesHydrotest PackageMark Darrel AranasNo ratings yet
- f2 (2) (1) Reviewer Chief Officer Materials.Document20 pagesf2 (2) (1) Reviewer Chief Officer Materials.Alden Almaquer Delizo100% (1)
- Hho Dry DiagramDocument7 pagesHho Dry Diagramdesertbloom100% (2)
- Drilling and Completion Technique Selection Methodology For CBMDocument14 pagesDrilling and Completion Technique Selection Methodology For CBMRyodi HanandaNo ratings yet
- Why Is DLN Tuning Done in GE Gas Turbines - What Is The Purpose To Do So - QuoraDocument2 pagesWhy Is DLN Tuning Done in GE Gas Turbines - What Is The Purpose To Do So - Quoraajo zinzoNo ratings yet
- Degreaser Heavy DutyDocument2 pagesDegreaser Heavy DutyukalNo ratings yet
- PTQ 2020 - Revamps - ScribdDocument56 pagesPTQ 2020 - Revamps - Scribdratninp9368No ratings yet
- Using Down Hole ChokesDocument5 pagesUsing Down Hole ChokesScott YoungNo ratings yet
- Prueba de Alternador CaterpillarDocument2 pagesPrueba de Alternador CaterpillarRamón José Aponte FrancoNo ratings yet
- Petroland PL 01 (230810)Document9 pagesPetroland PL 01 (230810)mantenimiento keruiNo ratings yet