You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- QUESTION 2 Assignment 6 Chi SquareDocument2 pagesQUESTION 2 Assignment 6 Chi SquareKHAIRUNISANo ratings yet
- Statistics For Social Science Using SPSSDocument5 pagesStatistics For Social Science Using SPSSKHAIRUNISANo ratings yet
- Egs 5905 Education and Teaching ProfessionDocument8 pagesEgs 5905 Education and Teaching ProfessionKHAIRUNISANo ratings yet
- The Future Direction of TVETDocument18 pagesThe Future Direction of TVETKHAIRUNISA100% (1)
- Contemporary Designs For Curriculum Development: Tve 5002 Curriculum Design in Technical and Vocational EducationDocument20 pagesContemporary Designs For Curriculum Development: Tve 5002 Curriculum Design in Technical and Vocational EducationKHAIRUNISANo ratings yet
- Normal Distribution Test Results for Student Score DataDocument2 pagesNormal Distribution Test Results for Student Score DataKHAIRUNISANo ratings yet
- Pemilihan Kerjaya Menurut Teori HollandDocument2 pagesPemilihan Kerjaya Menurut Teori HollandKHAIRUNISANo ratings yet
- QUESTION 2 Assignment 9 RegressionDocument1 pageQUESTION 2 Assignment 9 RegressionKHAIRUNISANo ratings yet
- Set Boundaries Between Your Work Life and Home LifeDocument2 pagesSet Boundaries Between Your Work Life and Home LifeKHAIRUNISANo ratings yet
- Appendix: DescriptivesDocument3 pagesAppendix: DescriptivesKHAIRUNISANo ratings yet
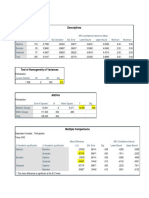
- .122 and Private Sector Is .128. Both VaDocument4 pages.122 and Private Sector Is .128. Both VaKHAIRUNISANo ratings yet
- Work Scope Service and ProjectDocument2 pagesWork Scope Service and ProjectKHAIRUNISANo ratings yet
- Assessment and Evaluation in TVETDocument10 pagesAssessment and Evaluation in TVETKHAIRUNISANo ratings yet
- Assessment in South KoreaDocument22 pagesAssessment in South KoreaKHAIRUNISANo ratings yet
- StatistikDocument2 pagesStatistikKHAIRUNISANo ratings yet
- Normal Distribution Test Results for Student Score DataDocument2 pagesNormal Distribution Test Results for Student Score DataKHAIRUNISANo ratings yet
- SKOP Pertengahan Tahun 2014 - Matematik Tahun 6Document2 pagesSKOP Pertengahan Tahun 2014 - Matematik Tahun 6KHAIRUNISANo ratings yet
- Employer Engagement and Career Opportunities: Tve 5009 Cooperative EducationDocument6 pagesEmployer Engagement and Career Opportunities: Tve 5009 Cooperative EducationKHAIRUNISANo ratings yet
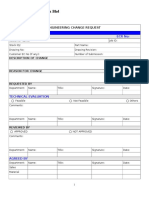
- Engineering Change Request FormDocument2 pagesEngineering Change Request FormKHAIRUNISA100% (1)
- Tagging - Cupboard & IndexDocument6 pagesTagging - Cupboard & IndexKHAIRUNISANo ratings yet
- Excel 2018 CalendarDocument12 pagesExcel 2018 CalendarKHAIRUNISANo ratings yet
- Mechanical Engineer Job DescriptionDocument2 pagesMechanical Engineer Job DescriptionKHAIRUNISANo ratings yet
- Gas CalculationsDocument2 pagesGas CalculationsKHAIRUNISANo ratings yet
- ECR Tracking LogDocument2 pagesECR Tracking LogKHAIRUNISANo ratings yet
- Test 2 MathsDocument12 pagesTest 2 MathsKHAIRUNISANo ratings yet
- BluescreenDocument1 pageBluescreenKHAIRUNISANo ratings yet
- Fault Tree AnalysisDocument70 pagesFault Tree Analysispankaj51281100% (1)
- SKOP Pertengahan Tahun 2014 - Matematik Tahun 6Document2 pagesSKOP Pertengahan Tahun 2014 - Matematik Tahun 6KHAIRUNISANo ratings yet
- Training Need Assessment Format (Modification)Document1 pageTraining Need Assessment Format (Modification)KHAIRUNISANo ratings yet
- Gas CalculationsDocument2 pagesGas CalculationsKHAIRUNISANo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 4 Buckle TriggersDocument28 pages4 Buckle TriggersNguyen Hoai Phuong100% (1)
- Vape Safe 2 StatsDocument4 pagesVape Safe 2 StatsŚС٣ΩTЏМЦṢ TξSTΪСḸЄჴNo ratings yet
- 2A016 Install Rev1972 1965Document40 pages2A016 Install Rev1972 1965Rich McDonaldNo ratings yet
- Bored Socket in BasaltDocument8 pagesBored Socket in BasaltGULF PILING LLCNo ratings yet
- Liebherr Hs DimensionsDocument12 pagesLiebherr Hs DimensionsLiebherrNo ratings yet
- Free Fall: Objective: The Purpose of This Experiment Is To Prove ThatDocument5 pagesFree Fall: Objective: The Purpose of This Experiment Is To Prove ThatSunday Glo M. Cabuyao100% (1)
- Pump Centrifugal Pre Commissioning ITPDocument10 pagesPump Centrifugal Pre Commissioning ITPMohamad IbrahimNo ratings yet
- Class VIII Physics Force of Friction AssignmentDocument1 pageClass VIII Physics Force of Friction AssignmentVikash SharmaNo ratings yet
- 2D Compressible Viscous-Flow Solver On Unstructured Meshes With Linear and Quadratic Reconstruction of Convective FluxesDocument77 pages2D Compressible Viscous-Flow Solver On Unstructured Meshes With Linear and Quadratic Reconstruction of Convective FluxeshityouNo ratings yet
- Physics 28th June Shift-2Document20 pagesPhysics 28th June Shift-2Suman KumariNo ratings yet
- 1D Advection-Diffusion MATLAB Code SolutionsDocument6 pages1D Advection-Diffusion MATLAB Code SolutionsAnonymous OrhjVLXO5sNo ratings yet
- Preparation, Structure and Morphology of Polymer Supports: David C. SherringtonDocument12 pagesPreparation, Structure and Morphology of Polymer Supports: David C. Sherringtonkishorkumarn8212No ratings yet
- Example of Box Girder Bridge CalculationDocument79 pagesExample of Box Girder Bridge Calculationaltarzakov100% (2)
- The Philosophy of David Hume According to HumeDocument7 pagesThe Philosophy of David Hume According to HumePaul Kallan100% (1)
- G-Snack Evolution Rev05Document2 pagesG-Snack Evolution Rev05whaleNo ratings yet
- Brief History of Remote SensingDocument16 pagesBrief History of Remote SensingFeyrisNo ratings yet
- Titrimetry (anEm'pnmQwQy)Document102 pagesTitrimetry (anEm'pnmQwQy)AchindA FernandoNo ratings yet
- Dokumen - Tips - Cotter Joint PPTX 58f9ab8d3dbc9Document19 pagesDokumen - Tips - Cotter Joint PPTX 58f9ab8d3dbc9Good YagNo ratings yet
- L&T Project ReportDocument48 pagesL&T Project Reportdeepakarora201188No ratings yet
- Mullion AnalysisDocument4 pagesMullion AnalysisganeshNo ratings yet
- Standing WaveDocument31 pagesStanding WaveJeff GicharuNo ratings yet
- BMP Assignment IIDocument3 pagesBMP Assignment IIShahminan ShahNo ratings yet
- Where Is There Light in This Room?Document18 pagesWhere Is There Light in This Room?Casmara LyNo ratings yet
- Performance Evaluation of Elevated Storage Reservoir With Hybrid StagingDocument11 pagesPerformance Evaluation of Elevated Storage Reservoir With Hybrid StagingVelumani sNo ratings yet
- ABB Digital Substation - Presentation - Apr 2017 - ANIMP PDFDocument29 pagesABB Digital Substation - Presentation - Apr 2017 - ANIMP PDFMohsin ElgondiNo ratings yet
- Astm E837-08Document17 pagesAstm E837-08jodakiNo ratings yet
- Bachelor of Science in Agricultural and Biosystems EngineeringDocument4 pagesBachelor of Science in Agricultural and Biosystems Engineeringsheil.cogayNo ratings yet
- Ultrasonic FlowmetersDocument30 pagesUltrasonic Flowmetersvcharles0% (1)
- IR sensor operation theory explainedDocument4 pagesIR sensor operation theory explainedSebastin Ashok100% (1)
- M A I N T e N A N C e M A N U A L F o R La B o R at o R y e Q U I P M e N TDocument77 pagesM A I N T e N A N C e M A N U A L F o R La B o R at o R y e Q U I P M e N TBMTNo ratings yet