You might also like
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- 11 Mds FDM Ultem 1010 Resin 0520aDocument10 pages11 Mds FDM Ultem 1010 Resin 0520akaledioskoppNo ratings yet
- Analysis of offshore jacket platform responsesDocument8 pagesAnalysis of offshore jacket platform responsesrobert.johns1028No ratings yet
- Fatigue Methods PDFDocument91 pagesFatigue Methods PDFGodwin100% (1)
- Ansys Aqwa User Manual 2.4.1Document8 pagesAnsys Aqwa User Manual 2.4.1ODG_290473No ratings yet
- Mooring OverviewDocument36 pagesMooring OverviewRAUL GALDONo ratings yet
- SHEAR7 Version4.4 2005 TheoryManual ADocument43 pagesSHEAR7 Version4.4 2005 TheoryManual Auktaindra50% (2)
- Cross Sea Detection Based On Synthetic Aperture Radar (Sar) Data and Numerical Wave Model (Wam)Document6 pagesCross Sea Detection Based On Synthetic Aperture Radar (Sar) Data and Numerical Wave Model (Wam)Gautam SudhirNo ratings yet
- Bonga Pipe in Pipe LayDocument66 pagesBonga Pipe in Pipe LayWilliam O OkolotuNo ratings yet
- OpenWEC ManualDocument10 pagesOpenWEC ManualSaishuai DaiNo ratings yet
- Australian Maritime College - Sizing of Catenary Mooring LinesDocument14 pagesAustralian Maritime College - Sizing of Catenary Mooring LinesAnwarul Shafiq AwalludinNo ratings yet
- Pipeline Landfall - Cofferdam PDFDocument7 pagesPipeline Landfall - Cofferdam PDFdndudcNo ratings yet
- Optimisaton of Static Characteristics of A Lazy Wave RizerDocument23 pagesOptimisaton of Static Characteristics of A Lazy Wave RizerAbiodunAremuOliyideNo ratings yet
- Hutton TLP InstallationDocument10 pagesHutton TLP InstallationDzaki AuliaNo ratings yet
- Tripod Support Structure: Pre-Design and Natural Frequency Assessment For The 6 MW DOWECDocument21 pagesTripod Support Structure: Pre-Design and Natural Frequency Assessment For The 6 MW DOWECGuillermoNo ratings yet
- Design of Horizontal Axis Tidal TurbinesDocument8 pagesDesign of Horizontal Axis Tidal TurbinesMarwa ElzalabaniNo ratings yet
- Buzzard Field Development Structural Computer ModelDocument63 pagesBuzzard Field Development Structural Computer ModelneelcorNo ratings yet
- Master Thesis 2010-Review and Verification of Marine Riser Analysis ProgramsDocument113 pagesMaster Thesis 2010-Review and Verification of Marine Riser Analysis Programsmghu70No ratings yet
- Ultimate Strength PrinciplesDocument105 pagesUltimate Strength PrinciplesSahil Jawa100% (1)
- 02pa GT 4 6 PDFDocument25 pages02pa GT 4 6 PDFMarcelo Varejão CasarinNo ratings yet
- Pull in AnalysisDocument4 pagesPull in Analysisgvsha88No ratings yet
- OTC 12195 Combined Lateral and Vertical Loading of Caisson FoundationsDocument12 pagesOTC 12195 Combined Lateral and Vertical Loading of Caisson FoundationsHarsha TejaNo ratings yet
- SloshingDocument18 pagesSloshingsergiostolovasNo ratings yet
- Deepwater PlatformsDocument20 pagesDeepwater PlatformsSergio Alejandro AyalaNo ratings yet
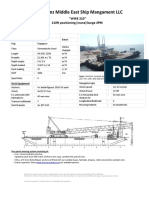
- Allianz Middle East Ship Mangament LLC: "WWE 210" 210ft Positioning (Crane) Barge 4PMDocument2 pagesAllianz Middle East Ship Mangament LLC: "WWE 210" 210ft Positioning (Crane) Barge 4PMCyril J PadiyathNo ratings yet
- Suction anchor installation and failure modesDocument12 pagesSuction anchor installation and failure modesgamidi67No ratings yet
- Wasim UMDocument42 pagesWasim UMPygamosNo ratings yet
- Fatigue-Mat 4-DeterministicDocument35 pagesFatigue-Mat 4-Deterministicfahmi rajziNo ratings yet
- Well Head Fatigue PresDocument17 pagesWell Head Fatigue PresdeeperdrillerNo ratings yet
- Bouzid Et Al 2013Document22 pagesBouzid Et Al 2013Miyawin AmehdeepNo ratings yet
- Case Studies For Evaluating Hydrodynamic Motion Responses Using MOSESDocument26 pagesCase Studies For Evaluating Hydrodynamic Motion Responses Using MOSESATLURI SATYA SRINIVAS oe13m002No ratings yet
- Cables and Skates - Improving The Weakest Links: Chris BabinDocument16 pagesCables and Skates - Improving The Weakest Links: Chris Babinmsm.ele2009No ratings yet
- 286 Oral WED 1B 04Document6 pages286 Oral WED 1B 04Guomin JiNo ratings yet
- Deepwater Sedimentary Systems: Science, Discovery, and ApplicationsFrom EverandDeepwater Sedimentary Systems: Science, Discovery, and ApplicationsJon R. RotzienNo ratings yet
- OMAE2012-83522: Pipeline Stabilisation Using Pre-Trenching and Sand BackfillDocument8 pagesOMAE2012-83522: Pipeline Stabilisation Using Pre-Trenching and Sand BackfillLucas FladinirNo ratings yet
- Seakeeping Methods Lecture - Alto UniversityDocument35 pagesSeakeeping Methods Lecture - Alto UniversityajayNo ratings yet
- Semi-Submersible's Response Prediction by Diffraction Potential MethodeDocument8 pagesSemi-Submersible's Response Prediction by Diffraction Potential MethodePaul CLoonNo ratings yet
- Basic Linear Static Finite Element AnalysisDocument19 pagesBasic Linear Static Finite Element AnalysisRuben Bartolome GarciaNo ratings yet
- Wave Loads On Small BodiesDocument31 pagesWave Loads On Small BodiesannamkeerthiNo ratings yet
- Orca Flex BrochureDocument2 pagesOrca Flex BrochurejesusgameboyNo ratings yet
- ONGC Mumbai High AccidentDocument19 pagesONGC Mumbai High AccidentMuzahid KhanNo ratings yet
- Lateral Loading of Suction Pile in 3D 1488918612Document35 pagesLateral Loading of Suction Pile in 3D 1488918612mohamed magdyNo ratings yet
- Dynamic Analysis of An Offshore Pipe Laying Operation Using The Reel MethodDocument12 pagesDynamic Analysis of An Offshore Pipe Laying Operation Using The Reel MethodAlberipaNo ratings yet
- Iors 2013Document35 pagesIors 2013jeedanNo ratings yet
- WebtocDocument10 pagesWebtocriobmNo ratings yet
- PAT 322 - Buckling and Post-Buckling AnalysisDocument26 pagesPAT 322 - Buckling and Post-Buckling Analysishakan demirNo ratings yet
- Sesam Webinar - Complete Structural Analysis For Floating OWT - QA - tcm8-105379Document9 pagesSesam Webinar - Complete Structural Analysis For Floating OWT - QA - tcm8-105379samiransmitaNo ratings yet
- PLEM Pile Drivability PDFDocument49 pagesPLEM Pile Drivability PDFTharach JanesuapasaereeNo ratings yet
- OMAE2012 84121 PresentationDocument16 pagesOMAE2012 84121 PresentationsojanvasudevanNo ratings yet
- Evolution of Pile Shaft Capacity Over Time in Mari PDFDocument15 pagesEvolution of Pile Shaft Capacity Over Time in Mari PDFRazvan-Ionut SimionNo ratings yet
- Civ-su-1.28-A Helidecks On Offshore InstallationsDocument12 pagesCiv-su-1.28-A Helidecks On Offshore InstallationsBolarinwaNo ratings yet
- Practical Design of Control SurfaceDocument40 pagesPractical Design of Control SurfaceRyder SahithNo ratings yet
- OMAE2008-57082: A New Wind and Wave Atlas of The Hellenic SeasDocument9 pagesOMAE2008-57082: A New Wind and Wave Atlas of The Hellenic SeaspanNo ratings yet
- Hydro Structure PapersDocument157 pagesHydro Structure PapersChen Chu-yunNo ratings yet
- Mathcad Marine TechnologyDocument22 pagesMathcad Marine TechnologyOkolo ObinnaNo ratings yet
- Hydrodynamic Analysis On Gumusut Kakap PlatformDocument55 pagesHydrodynamic Analysis On Gumusut Kakap PlatformMinTzHo100% (1)
- Drag Anchor FlukeDocument6 pagesDrag Anchor FlukesiswouNo ratings yet
- Numerical Models for Submerged Breakwaters: Coastal Hydrodynamics and MorphodynamicsFrom EverandNumerical Models for Submerged Breakwaters: Coastal Hydrodynamics and MorphodynamicsNo ratings yet
- Waves on Beaches and Resulting Sediment Transport: Proceedings of an Advanced Seminar, Conducted by the Mathematics Research Center, the University of Wisconsin, and the Coastal Engineering Research Center, U. S. Army, at Madison, October 11–13, 1971From EverandWaves on Beaches and Resulting Sediment Transport: Proceedings of an Advanced Seminar, Conducted by the Mathematics Research Center, the University of Wisconsin, and the Coastal Engineering Research Center, U. S. Army, at Madison, October 11–13, 1971R. E. MeyerNo ratings yet
- Wind TurbineDocument42 pagesWind TurbineAlaeddineNo ratings yet
- Mk8 Electric Tether Winch Product GuideDocument2 pagesMk8 Electric Tether Winch Product GuideAlaeddineNo ratings yet
- Structural Reliability Assessment of A Hoist Drum For An Offshore CraneDocument96 pagesStructural Reliability Assessment of A Hoist Drum For An Offshore CraneAlaeddine100% (2)
- Single Drum Winch Design Chapter 10Document54 pagesSingle Drum Winch Design Chapter 10kelvinyeoh100% (3)
- PHYS 1100 Waves SolutionsDocument7 pagesPHYS 1100 Waves SolutionsLeoncio Santos TressNo ratings yet
- FukudaUF 4100Document2 pagesFukudaUF 4100Adijoyo PurwonegoroNo ratings yet
- Corrosion preventive zinc coatings standardDocument28 pagesCorrosion preventive zinc coatings standardAce LeeNo ratings yet
- 2.Cbs SolutionDocument14 pages2.Cbs SolutionHAZARDOUS WIZARDNo ratings yet
- The Odor of Optical Isomers An Experiment in Organic ChemistryDocument2 pagesThe Odor of Optical Isomers An Experiment in Organic Chemistrygeovani2No ratings yet
- 1 Principles of Chemical Reactions 2Document21 pages1 Principles of Chemical Reactions 2prathap394No ratings yet
- Hydrogen Reformer Furnace Failure PDFDocument10 pagesHydrogen Reformer Furnace Failure PDFJacekNo ratings yet
- TEWI AnalysisDocument63 pagesTEWI Analysismirali74No ratings yet
- Rotary Airlock Feeder (Valve)Document6 pagesRotary Airlock Feeder (Valve)Ali Hüthüt100% (3)
- Exercise: Specific Heat of SolidDocument3 pagesExercise: Specific Heat of SolidpcandiasNo ratings yet
- Average TZDocument6 pagesAverage TZvictor javier nuñezNo ratings yet
- Water and Its Forms: Name: - DateDocument2 pagesWater and Its Forms: Name: - DateNutrionist Preet PatelNo ratings yet
- Nuratherm PIR TDSDocument2 pagesNuratherm PIR TDSNathan BlythNo ratings yet
- Bernoullis Equation Lab ReportDocument12 pagesBernoullis Equation Lab ReportgeduyoxNo ratings yet
- Chute Design and Problems-Causes and SolutionDocument19 pagesChute Design and Problems-Causes and SolutionThakaneNo ratings yet
- Laws of Motion: Comparing Aristotle and Galileo's ViewsDocument13 pagesLaws of Motion: Comparing Aristotle and Galileo's Viewsjal bayani0% (1)
- Zeolite Is Alive, Do Not Use For DetoxDocument9 pagesZeolite Is Alive, Do Not Use For DetoxSY LodhiNo ratings yet
- Usp (1118) Monitoring Devices-Time, Temperature, and HumidityDocument3 pagesUsp (1118) Monitoring Devices-Time, Temperature, and HumiditySara OchoaNo ratings yet
- DR RS Tutorial Sheet-Mechanical OperationsDocument8 pagesDR RS Tutorial Sheet-Mechanical OperationsNguyễn Hoàng QuânNo ratings yet
- Soil Cheatsheet (Updated)Document3 pagesSoil Cheatsheet (Updated)AOS100% (1)
- Coating Guide 2010 - Ev14 - PLATITDocument23 pagesCoating Guide 2010 - Ev14 - PLATITalbertoaimenNo ratings yet
- 2DOF System Free Vibration AnalysisDocument42 pages2DOF System Free Vibration Analysismohanrajjercy71No ratings yet
- PMRE 6006 WT Assignments Oct 2017Document2 pagesPMRE 6006 WT Assignments Oct 2017Noor HasanNo ratings yet
- SCIE 10 - Chapter 1Document3 pagesSCIE 10 - Chapter 1Crishia joy J. EstrellaNo ratings yet
- J. Subbiah,: Thermal Power Station-Ii Neyveli Lignite Corporation Limited NeyveliDocument55 pagesJ. Subbiah,: Thermal Power Station-Ii Neyveli Lignite Corporation Limited Neyvelidreamboy87No ratings yet
- Advanced Gas Tanker TrainingDocument136 pagesAdvanced Gas Tanker TrainingPrassanna Venkatesh100% (2)
- Refrigeration Commissioning ProcedureDocument12 pagesRefrigeration Commissioning ProcedureLmaoNo ratings yet
- Practice Questions 41 To 50Document3 pagesPractice Questions 41 To 50anthonyhewitt250No ratings yet
- CO2 Capture Using Monoethanolamine (MEA) Aqueous SolutionDocument18 pagesCO2 Capture Using Monoethanolamine (MEA) Aqueous SolutionChia-YiiNo ratings yet
- Air Receivers For Compressed Air Installation - SpecificationDocument10 pagesAir Receivers For Compressed Air Installation - Specificationsravan13785No ratings yet