You might also like
- Mathematical Modeling for Dynamic System ControlDocument28 pagesMathematical Modeling for Dynamic System ControlAhmed SaidNo ratings yet
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- Topic 5 Transfer Function Approach To Modeling Dynamic SystemsDocument49 pagesTopic 5 Transfer Function Approach To Modeling Dynamic Systemswenfang lee0% (1)
- EE351Chap3-2.0 - Transfer FTN & SFGsDocument19 pagesEE351Chap3-2.0 - Transfer FTN & SFGsSardar Hamid ullahNo ratings yet
- ME 475 Mechatronics: Semester: February 2015Document15 pagesME 475 Mechatronics: Semester: February 2015ফারহান আহমেদ আবীরNo ratings yet
- Online Control Lecture #2Document33 pagesOnline Control Lecture #2Noor GamingNo ratings yet
- Lecture Notes 3:: Transfer Functions, Poles and ZerosDocument7 pagesLecture Notes 3:: Transfer Functions, Poles and ZerosPreetham SaigalNo ratings yet
- Time Response PDFDocument104 pagesTime Response PDFMeshach KumarNo ratings yet
- Linear Systems: Prof Sung-Ho HurDocument30 pagesLinear Systems: Prof Sung-Ho HurYousef BilbeisiNo ratings yet
- Control Systems Lecture Notes on Time Response AnalysisDocument10 pagesControl Systems Lecture Notes on Time Response AnalysisDhinesh PeriyasamyNo ratings yet
- Control Sol GA PDFDocument342 pagesControl Sol GA PDFRishabh ShuklaNo ratings yet
- Me 360 Transfer FunctionsDocument3 pagesMe 360 Transfer FunctionsftoomauaeNo ratings yet
- 2 2.transfer FunctionDocument60 pages2 2.transfer FunctionEngenheiro TeslandoNo ratings yet
- 5 - Handout 131Document3 pages5 - Handout 131athenalavegaNo ratings yet
- Quiz5 Soln Es332 NRB F23Document2 pagesQuiz5 Soln Es332 NRB F23hamzasyed12098No ratings yet
- Chapter 4Document39 pagesChapter 4Joseph IbrahimNo ratings yet
- Suggested Solution To Past Papers PDFDocument20 pagesSuggested Solution To Past Papers PDFMgla AngelNo ratings yet
- Multivariable Chapter2Document42 pagesMultivariable Chapter2FASIH UR RAHMANNo ratings yet
- Chapter 1 IntroductionDocument32 pagesChapter 1 IntroductionYucheng XiangNo ratings yet
- Lab 4Document16 pagesLab 4Maitha SaeedNo ratings yet
- Assignment 1Document4 pagesAssignment 1Ashish KushwahaNo ratings yet
- Lecture 2+modeling+ +Document60 pagesLecture 2+modeling+ +呀HongNo ratings yet
- Control Systems: Dynamic ResponseDocument35 pagesControl Systems: Dynamic ResponseLovemore MakombeNo ratings yet
- Control Engineering Assignment QuestionsDocument1 pageControl Engineering Assignment QuestionsAswath PNo ratings yet
- Chapter 5 - Dynamic Behavior of First-Order and Second-Order ProcessesDocument44 pagesChapter 5 - Dynamic Behavior of First-Order and Second-Order ProcessesFakhrulShahrilEzanieNo ratings yet
- Control Systems Lecture04: Transfer Functions and Poles & ZerosDocument53 pagesControl Systems Lecture04: Transfer Functions and Poles & Zerosxtito2No ratings yet
- Control Chapter 1 - Lecture 1Document29 pagesControl Chapter 1 - Lecture 13re0oooNo ratings yet
- Question Bank Mathematical MoellingDocument6 pagesQuestion Bank Mathematical Moellingshama JNo ratings yet
- Chapter-1: 1.1 Control Design ProcedureDocument23 pagesChapter-1: 1.1 Control Design ProcedureWildan MumtazNo ratings yet
- Control System Fundamental: Time Response AnalysisDocument77 pagesControl System Fundamental: Time Response Analysisoneisa92100% (1)
- Process Control Transfer FunctionsDocument16 pagesProcess Control Transfer FunctionsAnonymous 0zrCNQNo ratings yet
- Ps 9Document3 pagesPs 9Red Russian47No ratings yet
- Time ResponseDocument29 pagesTime ResponseKhairunnisa Abu KhairNo ratings yet
- 1 Lab Manual-Final-Control-System-1Document35 pages1 Lab Manual-Final-Control-System-1Shimalis RetaNo ratings yet
- Introduction To Control Systems Analysis 1. The Transfer Function 1.1Document7 pagesIntroduction To Control Systems Analysis 1. The Transfer Function 1.1prica_adrianNo ratings yet
- Experiment - 2 2.1 Multi - Block Systems:: Clear CLCDocument13 pagesExperiment - 2 2.1 Multi - Block Systems:: Clear CLCRamaDinakaranNo ratings yet
- EEET2197 Tute2 SolnDocument5 pagesEEET2197 Tute2 SolnCollin lcwNo ratings yet
- 16-EL-A2 - Mai 2017 - Version AnglaiseDocument7 pages16-EL-A2 - Mai 2017 - Version Anglaisemadani abdelhamidNo ratings yet
- Lecture 4 - Simple Design Problems: K. J. ÅströmDocument7 pagesLecture 4 - Simple Design Problems: K. J. ÅströmEdutamNo ratings yet
- EEET2197 Tute2Document2 pagesEEET2197 Tute2Collin lcwNo ratings yet
- TP Sys2Document24 pagesTP Sys2Draw SmailNo ratings yet
- Experiment E. Liquid Level Control Using Coupled TanksDocument29 pagesExperiment E. Liquid Level Control Using Coupled Tanks파랑No ratings yet
- Ejercicios de LaplaceDocument3 pagesEjercicios de LaplaceJohn Erick Quiroga GonzalezNo ratings yet
- Control Systems Ii: Mutaz RyalatDocument38 pagesControl Systems Ii: Mutaz Ryalatnoder markNo ratings yet
- 5 Transfer Functions: T (S) Y (S) R(S)Document3 pages5 Transfer Functions: T (S) Y (S) R(S)vktc •No ratings yet
- 246 Sample ChapterDocument24 pages246 Sample ChapterAhmed SaidNo ratings yet
- Lecture 7: System Performance and StabilityDocument20 pagesLecture 7: System Performance and StabilitySabine Brosch100% (1)
- Partiel-Asservissements Version1Document2 pagesPartiel-Asservissements Version1rachid.mansouriNo ratings yet
- Mathematical Modeling Techniques in Control SystemsDocument20 pagesMathematical Modeling Techniques in Control SystemsMouadh WahraniNo ratings yet
- Automatic Control CH7Document48 pagesAutomatic Control CH7廖偉丞No ratings yet
- Lecture 5&6Document24 pagesLecture 5&6elneelNo ratings yet
- EE 312 Lecture 1Document12 pagesEE 312 Lecture 1دكتور كونوهاNo ratings yet
- Handout E.15 - Examples On Transient Response of First and Second Order Systems, System Damping and Natural FrequencyDocument14 pagesHandout E.15 - Examples On Transient Response of First and Second Order Systems, System Damping and Natural FrequencyRishikesh BhavsarNo ratings yet
- EEE3001 Software ManualDocument34 pagesEEE3001 Software ManualManuDubeyNo ratings yet
- Thuật Toán Điều Khiển1Document23 pagesThuật Toán Điều Khiển1Văn Nghĩa NguyễnNo ratings yet
- Mathematic Modelling of Dynamic SYSTEMS Ch. 2Document31 pagesMathematic Modelling of Dynamic SYSTEMS Ch. 2Irtiza IshrakNo ratings yet
- Lec 3Document46 pagesLec 3Karan ChawlaNo ratings yet
- ELG4152L305Document33 pagesELG4152L305Rahul GalaNo ratings yet
- Analysis of Multiple Evaporator Refrigeration SystemDocument3 pagesAnalysis of Multiple Evaporator Refrigeration SystemBen AhmedNo ratings yet
- CompressorDocument20 pagesCompressorManoj KumarNo ratings yet
- Bearing SelectionDocument22 pagesBearing SelectionBen AhmedNo ratings yet
- Milling Process02Document83 pagesMilling Process02Ben AhmedNo ratings yet
- Publication 10 8946 6209 PDFDocument33 pagesPublication 10 8946 6209 PDFfrandelgado7No ratings yet
- Numerical Differentiation and IntegrationDocument10 pagesNumerical Differentiation and IntegrationBen AhmedNo ratings yet
- CN Mech Joint Used in PipingDocument13 pagesCN Mech Joint Used in PipingHassan NuurNo ratings yet
- 25 Estimation of Machining TimeDocument15 pages25 Estimation of Machining TimePRASAD326100% (16)
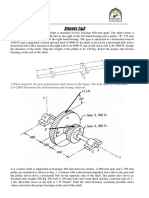
- Taif Sheet 2&3 Shaft Design and BearingsDocument2 pagesTaif Sheet 2&3 Shaft Design and BearingsBen Ahmed100% (1)
- Lec 1Document19 pagesLec 1Ben AhmedNo ratings yet
- IELTS Sample Writing Academic Task 2 5Document3 pagesIELTS Sample Writing Academic Task 2 5Zain SaleemNo ratings yet
- Chapter 5Document14 pagesChapter 5Ben AhmedNo ratings yet
- Chapter 1Document20 pagesChapter 1Ben AhmedNo ratings yet
- Shaft Design PDFDocument25 pagesShaft Design PDFBen AhmedNo ratings yet
- Taif Sheet 2&3 Shaft Design and BearingsDocument2 pagesTaif Sheet 2&3 Shaft Design and BearingsBen Ahmed100% (1)
- CH 321Document11 pagesCH 321Ben AhmedNo ratings yet
- Fitting and Machining Theory n2 Apr2011QPDocument8 pagesFitting and Machining Theory n2 Apr2011QPBen Ahmed100% (1)
- Step, ramp and convolution response analysisDocument7 pagesStep, ramp and convolution response analysisomidNo ratings yet
- Simple Vibration Problems With MATLAB (And Some Help From MAPLE)Document170 pagesSimple Vibration Problems With MATLAB (And Some Help From MAPLE)megustalazorraNo ratings yet
- Delphi CompressorsDocument12 pagesDelphi CompressorsRAJENDRANJD20097864100% (2)
- Manualsolutionsformachinedesignbykhurmiandgupta 121124075743 Phpapp01 PDFDocument50 pagesManualsolutionsformachinedesignbykhurmiandgupta 121124075743 Phpapp01 PDFMOHANNo ratings yet
- Lab 2hardness EngDocument40 pagesLab 2hardness EngBen AhmedNo ratings yet
- Experiment 9 PDFDocument11 pagesExperiment 9 PDFBen AhmedNo ratings yet
- 1 Sheet Introduction 1Document3 pages1 Sheet Introduction 1Ben AhmedNo ratings yet
- Solved Problem Ch3 PDFDocument4 pagesSolved Problem Ch3 PDFBen AhmedNo ratings yet
- Diode Applications ExamplesDocument32 pagesDiode Applications ExamplesBen AhmedNo ratings yet
- Solved Problem Ch3 PDFDocument4 pagesSolved Problem Ch3 PDFBen AhmedNo ratings yet
- Course WildeDocument76 pagesCourse Wildeberserker2236No ratings yet
- FourierDocument7 pagesFourierAnonymous FqWJo7No ratings yet
- Multivector Differential Calculus.Document48 pagesMultivector Differential Calculus.kek spinneNo ratings yet
- SCE52001 Advanced Engineering Mathematics Notes 1Document24 pagesSCE52001 Advanced Engineering Mathematics Notes 1Alexander AlexanderNo ratings yet
- Num Lec5 LUDecompositionADocument26 pagesNum Lec5 LUDecompositionAMariane Asley KatigbakNo ratings yet
- Trig Ratios of General AnglesDocument4 pagesTrig Ratios of General AnglesAndrew GoyaNo ratings yet
- Maths SOP Report PDFDocument18 pagesMaths SOP Report PDFMOHIT JAINNo ratings yet
- Methods For Evaluating Difficult Integrals: Charles Martin April 29, 2010Document4 pagesMethods For Evaluating Difficult Integrals: Charles Martin April 29, 2010aviralNo ratings yet
- Blindfold 3x3 PDFDocument26 pagesBlindfold 3x3 PDFjavimm100% (1)
- 1st SemesterDocument250 pages1st SemesterVishalPandeyNo ratings yet
- Applications of Derivatives MaximizedDocument25 pagesApplications of Derivatives MaximizedswadhinNo ratings yet
- Continuity of a function at a pointDocument4 pagesContinuity of a function at a pointKyran kurt EtcobanezNo ratings yet
- WINSEM2019-20 MAT2002 ETH VL2019205003139 REFERENCE MATERIAL MAT2002 - Winter - 2019Document11 pagesWINSEM2019-20 MAT2002 ETH VL2019205003139 REFERENCE MATERIAL MAT2002 - Winter - 2019Bhanu ShankyNo ratings yet
- General Math Week 5 Review on Rational Functions and Inverse FunctionsDocument23 pagesGeneral Math Week 5 Review on Rational Functions and Inverse FunctionsL AlcosabaNo ratings yet
- Elementary Properties of Cyclotomic Polynomials by Yimin GeDocument8 pagesElementary Properties of Cyclotomic Polynomials by Yimin GeGary BlakeNo ratings yet
- Midterm Examination: March 5th, 2021Document7 pagesMidterm Examination: March 5th, 2021mingNo ratings yet
- Exp 7 MatlabDocument11 pagesExp 7 MatlabKevin BlotsNo ratings yet
- General Mathematics Week 1 ModuleDocument28 pagesGeneral Mathematics Week 1 ModuleBlez Roz Fiangaan VizcaraNo ratings yet
- CALCULUS LIMITS AND CONTINUITYDocument9 pagesCALCULUS LIMITS AND CONTINUITYClarenzNo ratings yet
- Linear Time-Invariant Systems SolutionDocument11 pagesLinear Time-Invariant Systems SolutionbzuiaoqNo ratings yet
- ECE18R202Document2 pagesECE18R202Jeya Prakash K0% (1)
- Week 1: Name: Lokesh Kumar REG NO: 20BCE1683 Subject: Mat1011 - MatlabDocument11 pagesWeek 1: Name: Lokesh Kumar REG NO: 20BCE1683 Subject: Mat1011 - MatlabLOKESH KUMARNo ratings yet
- Notes Important Questions Answers 12th Math Chapter 2 Exercise 2.9Document10 pagesNotes Important Questions Answers 12th Math Chapter 2 Exercise 2.9shahidNo ratings yet
- Logarithms Worksheet SolutionsDocument2 pagesLogarithms Worksheet SolutionsRAVI ANANTHAKRISHNANNo ratings yet
- Basic Riemannian Geometry: Cambridge Books Online © Cambridge University Press, 2009Document29 pagesBasic Riemannian Geometry: Cambridge Books Online © Cambridge University Press, 2009aguiNo ratings yet
- Maths Bhilai Study MaterialDocument97 pagesMaths Bhilai Study MaterialVarun SahuNo ratings yet
- Signals and Systems Formula SheetDocument29 pagesSignals and Systems Formula SheetVikesh gondNo ratings yet
- Assignment 12 AnsDocument10 pagesAssignment 12 AnsAnuska DeyNo ratings yet
- AP Calculus AB BC Trigonometric IntegrationDocument23 pagesAP Calculus AB BC Trigonometric Integration34No ratings yet
- DIAGONLIZATIONDocument27 pagesDIAGONLIZATIONJinky CanitanNo ratings yet