You might also like
- William Stallings Computer Organization and Architecture 7 EditionDocument41 pagesWilliam Stallings Computer Organization and Architecture 7 EditionINDIAN SQUATCHERNo ratings yet
- Instruction Format PDFDocument5 pagesInstruction Format PDFG.SAIDULUNo ratings yet
- CH 1 3.ppt Type IDocument71 pagesCH 1 3.ppt Type Ilaraibnawaz86No ratings yet
- Unit 4 MPMCDocument22 pagesUnit 4 MPMCSekhar ReddyNo ratings yet
- MES (Mod-1)Document59 pagesMES (Mod-1)Sathwik Rao KNo ratings yet
- Arithmetic Logic UnitDocument11 pagesArithmetic Logic UnitPrasanna Kumar VotarikariNo ratings yet
- 526 ReviewerDocument3 pages526 ReviewermatthewivanNo ratings yet
- FALLSEM2023-24 SWE1005 TH VL2023240102744 2023-07-25 Reference-Material-IDocument158 pagesFALLSEM2023-24 SWE1005 TH VL2023240102744 2023-07-25 Reference-Material-Irahulduraisamy761No ratings yet
- 2 Central Processing Unit PDFDocument68 pages2 Central Processing Unit PDFمعتز العجيليNo ratings yet
- Microcontrollers and ApplicationsDocument254 pagesMicrocontrollers and ApplicationsArivukkarasan RajaNo ratings yet
- Introduction to Computer Organization and ArchitectureDocument15 pagesIntroduction to Computer Organization and Architecturemuhammad farooqNo ratings yet
- CSE-2201 Course Slides on Computer ArchitectureDocument71 pagesCSE-2201 Course Slides on Computer ArchitectureKishoreK BNo ratings yet
- Microprocessors and Programming: Bus Architecture and CPU OperationDocument50 pagesMicroprocessors and Programming: Bus Architecture and CPU OperationEmirhan AlmaNo ratings yet
- Computer Architecture and Organization ExplainedDocument24 pagesComputer Architecture and Organization ExplainedNeel RavalNo ratings yet
- Computer Organization: Moore's Law and Von Neumann ModelDocument54 pagesComputer Organization: Moore's Law and Von Neumann ModelkaneeshaNo ratings yet
- Intro - Comp ArchDocument17 pagesIntro - Comp ArchEphraimNo ratings yet
- Basic Computer Architecture: Ateeq Ur RehmanDocument13 pagesBasic Computer Architecture: Ateeq Ur RehmanranaateeqNo ratings yet
- The Computer System Computer Function and Interconnection o Computer Functions o Interconnection Structures o Bus InterconnectionDocument71 pagesThe Computer System Computer Function and Interconnection o Computer Functions o Interconnection Structures o Bus Interconnectiongaurav99rocksNo ratings yet
- ESY LEC01 ComputerArchitectureDocument54 pagesESY LEC01 ComputerArchitectureThomNo ratings yet
- Module - 1: 1.1 Microprocessors V/S MicrocontrollersDocument10 pagesModule - 1: 1.1 Microprocessors V/S MicrocontrollersPushpa Latha100% (1)
- Unit 2 MPMC NotesDocument37 pagesUnit 2 MPMC NotesRohit Venkat PawanNo ratings yet
- MM 11Document41 pagesMM 11Amresh KumarNo ratings yet
- Bus-Based Computer Systems Chapter 4 ReportDocument2 pagesBus-Based Computer Systems Chapter 4 ReportHossam FadeelNo ratings yet
- Computer Organization and ArchitectureDocument13 pagesComputer Organization and ArchitectureassadNo ratings yet
- Comp Arch and Org - Lec 1Document27 pagesComp Arch and Org - Lec 1abatesolomon17No ratings yet
- FAC1002 - Computer Hardware (I)Document16 pagesFAC1002 - Computer Hardware (I)mohammad aljihad bin mohd jamal FJ1No ratings yet
- Module-2 ACADocument31 pagesModule-2 ACAVivek SinghNo ratings yet
- 20201221-Complete Notes MCADocument96 pages20201221-Complete Notes MCADanish UllahNo ratings yet
- Co Unit2 Part2Document10 pagesCo Unit2 Part2Manjushree N.SNo ratings yet
- Comp Arch and Org - Lec 1Document23 pagesComp Arch and Org - Lec 1EphremNo ratings yet
- Single-Cycle Mips ArchitectureDocument25 pagesSingle-Cycle Mips ArchitectureNicolle NaranjoNo ratings yet
- Control Unit ImplemntationDocument36 pagesControl Unit Implemntationbaldevram.214No ratings yet
- Cs 303: Computer Organization & ArchitectureDocument56 pagesCs 303: Computer Organization & ArchitectureHarsha VardhanNo ratings yet
- COMP375: What Is Computer Architecture?Document5 pagesCOMP375: What Is Computer Architecture?AliNo ratings yet
- Arm Processor ArchitectureDocument84 pagesArm Processor Architecturebhargava PrasadNo ratings yet
- EE16604 - EMBEDDED SYSTEMS INTRODUCTIONDocument40 pagesEE16604 - EMBEDDED SYSTEMS INTRODUCTIONsachin zerefNo ratings yet
- Lecture 1: Introduction To ARM Based Embedded SystemsDocument24 pagesLecture 1: Introduction To ARM Based Embedded SystemsSaurabh HedaNo ratings yet
- Computer Architecture & Organization ExplainedDocument36 pagesComputer Architecture & Organization ExplainedRed StreakNo ratings yet
- Tema 3 - Arquitectura Del Computador (En)Document26 pagesTema 3 - Arquitectura Del Computador (En)gormberkayNo ratings yet
- William Stallings Computer Organization and Architecture 7 Edition Architecture & Organization 1Document5 pagesWilliam Stallings Computer Organization and Architecture 7 Edition Architecture & Organization 1Rizky MaulidaNo ratings yet
- Coa Unit-3Document35 pagesCoa Unit-3Revanth RavikantiNo ratings yet
- Introduction To Computing SystemsDocument28 pagesIntroduction To Computing Systems-AkhilGannamrajuNo ratings yet
- ARM ProcessorDocument24 pagesARM ProcessorShreya AnushreeNo ratings yet
- The Microprocessor IntroductionDocument22 pagesThe Microprocessor IntroductionAli RazaNo ratings yet
- Computer Organization and Assembly Language: Week 1Document28 pagesComputer Organization and Assembly Language: Week 1nasirqureshiNo ratings yet
- CCS 3310 Computer Architecture and Assembly Language Chapter 1 IntroductionDocument15 pagesCCS 3310 Computer Architecture and Assembly Language Chapter 1 IntroductionhudhaifaNo ratings yet
- Computer Organization and Architecture OverviewDocument261 pagesComputer Organization and Architecture Overviewsuperstar53878% (9)
- 8051 Microcontroller Architecture & Interfacing GuideDocument178 pages8051 Microcontroller Architecture & Interfacing Guidesivar22No ratings yet
- Computer Organization and ArchitectureDocument49 pagesComputer Organization and ArchitectureBenard Dela CruzNo ratings yet
- IntroductionDocument32 pagesIntroductionKaseya TakahashiNo ratings yet
- CA 1st LecDocument22 pagesCA 1st LecTouseef sultanNo ratings yet
- Computer System Architecture - Morris ManoDocument261 pagesComputer System Architecture - Morris ManoHarshit RautNo ratings yet
- Computer ArchitectureDocument667 pagesComputer Architecturevishalchaurasiya360001No ratings yet
- Module1 3-Ias Risc CiscDocument19 pagesModule1 3-Ias Risc CiscCharan ChowdaryNo ratings yet
- Computer System Architecture - Morris Mano (1) - Pfu79k3tv14e238u9o4r794Document517 pagesComputer System Architecture - Morris Mano (1) - Pfu79k3tv14e238u9o4r794Trending this yearNo ratings yet
- Microprocessor Based System: My Lord! Advance Me in Knowledge and True UnderstandingDocument15 pagesMicroprocessor Based System: My Lord! Advance Me in Knowledge and True UnderstandingAsma' ZubirNo ratings yet
- Embedded Systems Design: A Unified Hardware/Software IntroductionDocument44 pagesEmbedded Systems Design: A Unified Hardware/Software IntroductionDr.S.A.SivakumarNo ratings yet
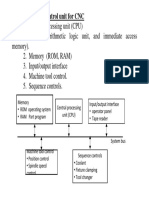
- CNC Machine Control UnitDocument14 pagesCNC Machine Control Unitkhalil alhatabNo ratings yet
- Introduction To Computing SystemsDocument24 pagesIntroduction To Computing SystemsDEEPIKA PAVUNDOSS 20BEC0285No ratings yet
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- Internet Resources: SAT Power ReadingDocument3 pagesInternet Resources: SAT Power ReadingSunanda ThompsonNo ratings yet
- CJ 111 - High Profile Case 2Document1 pageCJ 111 - High Profile Case 2Sunanda ThompsonNo ratings yet
- Pieces FrameworkDocument1 pagePieces Frameworkmy009.tkNo ratings yet
- Chromatography of Amino AcidsDocument2 pagesChromatography of Amino AcidsSunanda ThompsonNo ratings yet
- Sba Lab Writeup AdviceDocument2 pagesSba Lab Writeup AdviceSunanda ThompsonNo ratings yet
- TestDocument1 pageTestSunanda ThompsonNo ratings yet
- Compiler Design-Code OptimizationDocument150 pagesCompiler Design-Code OptimizationmanicheeseNo ratings yet
- R SubnettingDocument16 pagesR SubnettingManuj SathaNo ratings yet
- The System - Exception Class: DividebyzeroexceptionDocument5 pagesThe System - Exception Class: Dividebyzeroexceptionsandeep_nayak_17No ratings yet
- Sample ISMS Metrics and MeasuresDocument3 pagesSample ISMS Metrics and MeasuresJohn Manni100% (1)
- RARP and IP AddressingDocument4 pagesRARP and IP AddressingTarun S VatsNo ratings yet
- A Success Story With Mikrotik and DMASoftlab RADIUS MANAGER (Glass Line PVT LTDDocument17 pagesA Success Story With Mikrotik and DMASoftlab RADIUS MANAGER (Glass Line PVT LTDfuadhs2ndNo ratings yet
- DAA ADA Viva QuestionsDocument13 pagesDAA ADA Viva QuestionsAbhishek Manjunath70% (33)
- Best Practices With Windows Server Update ServicesDocument3 pagesBest Practices With Windows Server Update Servicesamnesia2001No ratings yet
- Kifercomp 348761 ppt05Document140 pagesKifercomp 348761 ppt05techaddiktNo ratings yet
- Python Casting: Specify A Variable TypeDocument5 pagesPython Casting: Specify A Variable TypehimanshuNo ratings yet
- infoPLC Net 68011496 HTML Basics For Simatic Cpus en PDFDocument42 pagesinfoPLC Net 68011496 HTML Basics For Simatic Cpus en PDFrosemberg_trujilloNo ratings yet
- Introduction To Internet TerminologyDocument8 pagesIntroduction To Internet TerminologyVigneshwaran SindhujaNo ratings yet
- Java Fire Alarm SystemDocument3 pagesJava Fire Alarm SystemKomal KashyapNo ratings yet
- Windows 98 Installation Procedure For The USB Drivers (Virtual Com)Document25 pagesWindows 98 Installation Procedure For The USB Drivers (Virtual Com)diego dNo ratings yet
- Convolutional Neural Networks: April 18, 2017 Lecture 5 - 1Document64 pagesConvolutional Neural Networks: April 18, 2017 Lecture 5 - 1Niraj ReginaldNo ratings yet
- I C Slave To SPI Master Bridge: December 2010 Reference Design RD1094Document7 pagesI C Slave To SPI Master Bridge: December 2010 Reference Design RD1094Milton GenesNo ratings yet
- IEEEJV - 82emotion Recognition On Twitter Comparative Study and Training A Unison Model PDFDocument14 pagesIEEEJV - 82emotion Recognition On Twitter Comparative Study and Training A Unison Model PDFmir razaNo ratings yet
- A Presentation On Software ConceptsDocument32 pagesA Presentation On Software ConceptsKamya Sharma100% (2)
- IT1171Document43 pagesIT1171bobwillmoreNo ratings yet
- Lab4 Asd SadasDocument3 pagesLab4 Asd Sadas....No ratings yet
- SAP PI Monitoring Activities PDFDocument10 pagesSAP PI Monitoring Activities PDFsuresh81c100% (1)
- PHP Course in Bhubaneswar-LIT Susant K RoutDocument9 pagesPHP Course in Bhubaneswar-LIT Susant K RoutPHP course in BhubaneswarNo ratings yet
- ZombiejsDocument33 pagesZombiejskaloyanNo ratings yet
- How Can I Add Items To A Spinner in Android - Stack Overflow PDFDocument7 pagesHow Can I Add Items To A Spinner in Android - Stack Overflow PDFShoaib QuraishiNo ratings yet
- Lab 09Document13 pagesLab 09Waqas AliNo ratings yet
- CTD Traning Quiz 2 Answer Key - Gonzales, Mark AnthonyDocument6 pagesCTD Traning Quiz 2 Answer Key - Gonzales, Mark Anthonytunying821No ratings yet
- Troubleshooting (59170 1)Document30 pagesTroubleshooting (59170 1)Griselda Maria Pinto SanchezNo ratings yet
- 105 - Installing OpenCVDocument3 pages105 - Installing OpenCVjdNo ratings yet
- I Semester PDFDocument7 pagesI Semester PDFSolaiNo ratings yet