You might also like
- Supersonic Combustion Models ApplicationDocument26 pagesSupersonic Combustion Models ApplicationendoparasiteNo ratings yet
- Combined Ducted Rocket and Solid Fuel Ramjet CycleDocument8 pagesCombined Ducted Rocket and Solid Fuel Ramjet CycleendoparasiteNo ratings yet
- mueIEEE14 PDFDocument8 pagesmueIEEE14 PDFlalitha rNo ratings yet
- Simscape UgDocument824 pagesSimscape Uggabo2008No ratings yet
- Microgravity Restart of Liquid Rocket Engine With Low Propellant ResidualsDocument26 pagesMicrogravity Restart of Liquid Rocket Engine With Low Propellant ResidualsendoparasiteNo ratings yet
- Moam - Info Simmechanics 5a322f221723dd6dcba0c75fDocument40 pagesMoam - Info Simmechanics 5a322f221723dd6dcba0c75fendoparasiteNo ratings yet
- Applsci 12 03356 v2Document9 pagesApplsci 12 03356 v2endoparasiteNo ratings yet
- My MainDocument29 pagesMy MainendoparasiteNo ratings yet
- Structural Dynamics in Rocket Launch VehiclesDocument38 pagesStructural Dynamics in Rocket Launch VehiclesendoparasiteNo ratings yet
- Lanz On 2014Document12 pagesLanz On 2014endoparasiteNo ratings yet
- Multibody System Simulation With SimmechanicsDocument24 pagesMultibody System Simulation With SimmechanicsSonny Jason ANo ratings yet
- Tutorial Sim MechanicsDocument840 pagesTutorial Sim MechanicsHernan Gonzalez100% (4)
- Thermal Design of A Ultra-Slim Notebook ComputerDocument7 pagesThermal Design of A Ultra-Slim Notebook ComputerendoparasiteNo ratings yet
- Moam - Info Simmechanics 5a322f221723dd6dcba0c75fDocument40 pagesMoam - Info Simmechanics 5a322f221723dd6dcba0c75fendoparasiteNo ratings yet
- ExtrapolationDocument13 pagesExtrapolationendoparasite0% (1)
- Experimental Investigation On Heat Transfer of Finned TubeDocument11 pagesExperimental Investigation On Heat Transfer of Finned TubeendoparasiteNo ratings yet
- Interpolation, Smoothing, and Extrapolation TechniquesDocument22 pagesInterpolation, Smoothing, and Extrapolation TechniquesAnita AndrianiNo ratings yet
- Thermal Design of A Laptop Computer by A Personal ComputerDocument6 pagesThermal Design of A Laptop Computer by A Personal ComputerendoparasiteNo ratings yet
- Shape Optimization of Micro-Channel Heat Sink For Micro-Electronic CoolingDocument9 pagesShape Optimization of Micro-Channel Heat Sink For Micro-Electronic CoolingendoparasiteNo ratings yet
- High-Performance Heat Sinking For VLSI PDFDocument4 pagesHigh-Performance Heat Sinking For VLSI PDFendoparasiteNo ratings yet
- CFD Analysis of A Kerosene Fuel Tank To Reduce Liquid SloshingDocument7 pagesCFD Analysis of A Kerosene Fuel Tank To Reduce Liquid SloshingendoparasiteNo ratings yet
- 2008 LeePS Saturated Flow Boiling HT in MCHSDocument18 pages2008 LeePS Saturated Flow Boiling HT in MCHSendoparasiteNo ratings yet
- AMOM Lecture1 - FundamentalsDocument50 pagesAMOM Lecture1 - FundamentalsendoparasiteNo ratings yet
- Ada 395503Document51 pagesAda 395503endoparasiteNo ratings yet
- Rocket Motor Design and Missile Flight Performance AnalysisDocument70 pagesRocket Motor Design and Missile Flight Performance Analysisbabak3316100% (1)
- Linearization of Non-Linear Ordinary Diff EquationDocument4 pagesLinearization of Non-Linear Ordinary Diff EquationendoparasiteNo ratings yet
- SBS Instalment Plans at 0% Markup : Alfalah Credit Cards Application FormDocument2 pagesSBS Instalment Plans at 0% Markup : Alfalah Credit Cards Application FormendoparasiteNo ratings yet
- Solving Nonlinear Governing Equations of Motion Using Matlab and Simulink in First Dynamics CourseDocument15 pagesSolving Nonlinear Governing Equations of Motion Using Matlab and Simulink in First Dynamics CourseendoparasiteNo ratings yet
- Part5 PDFDocument36 pagesPart5 PDFendoparasiteNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- JNTU World Geotech Engineering ExamDocument4 pagesJNTU World Geotech Engineering ExamDp VisheshNo ratings yet
- The Effect of Atom Position on X-Ray Diffraction IntensitiesDocument29 pagesThe Effect of Atom Position on X-Ray Diffraction IntensitiesJorge De Jesus Torres ReyesNo ratings yet
- Ec8451 - Emf - Unit 1Document5 pagesEc8451 - Emf - Unit 1krithikgokul selvamNo ratings yet
- Course Structure and Detailed Syllabus For 1st Year B.tech Admission Batch 2023-24Document27 pagesCourse Structure and Detailed Syllabus For 1st Year B.tech Admission Batch 2023-24nabajyotimajhi2000No ratings yet
- EMI and ACDocument14 pagesEMI and ACbharathNo ratings yet
- Resume AyanchattopadhyayDocument2 pagesResume Ayanchattopadhyayapi-163237383No ratings yet
- Cylinders of The PharaohDocument18 pagesCylinders of The PharaohiguandiánNo ratings yet
- National Level E-Conference On Innovative Trends in MechanicalDocument16 pagesNational Level E-Conference On Innovative Trends in MechanicalA BBNo ratings yet
- Design and Fabrication of Hand Water Pump Operated by A PendulumDocument6 pagesDesign and Fabrication of Hand Water Pump Operated by A PendulumAyyanrajNo ratings yet
- Tarea 1 MunsonDocument4 pagesTarea 1 MunsonAlexander JohnsonNo ratings yet
- Becker 1987Document16 pagesBecker 1987Luis Fernando Vergaray AstupiñaNo ratings yet
- Test Planner-Repeater Course - 2023-2024 - (Phase-03)Document2 pagesTest Planner-Repeater Course - 2023-2024 - (Phase-03)SbjNo ratings yet
- 2015 BFnature15750 MOESM58 ESMDocument9 pages2015 BFnature15750 MOESM58 ESMmacheng yangNo ratings yet
- Finding Binary Azeotropes Using Thermodynamic RelationshipsDocument7 pagesFinding Binary Azeotropes Using Thermodynamic Relationshipsshinta sariNo ratings yet
- Transformers:: " Transformers Are The Heart of The Alternating Current System." - William Stanley Jr.Document13 pagesTransformers:: " Transformers Are The Heart of The Alternating Current System." - William Stanley Jr.SRIRAM SATHISHNo ratings yet
- JEE Advanced 2020 Analysis JEE Advanced 2021 Analysis: WWW - Motion.ac - inDocument16 pagesJEE Advanced 2020 Analysis JEE Advanced 2021 Analysis: WWW - Motion.ac - inSarthak OmarNo ratings yet
- Applied MathematicsDocument119 pagesApplied MathematicsIAMMARKSNo ratings yet
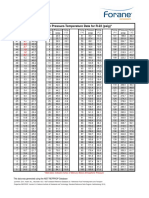
- Forane 22 Saturation Pressure Temperature DataDocument1 pageForane 22 Saturation Pressure Temperature Datavineeth100% (1)
- PIANC Seismic Design Guidelines for Port Structures Performance-Based DesignDocument37 pagesPIANC Seismic Design Guidelines for Port Structures Performance-Based Designben indrawanNo ratings yet
- Noise Level Calculations: Example #1Document2 pagesNoise Level Calculations: Example #1Susheel WankhedeNo ratings yet
- Mech4620 Group 12 Report PDFDocument12 pagesMech4620 Group 12 Report PDFAaron Hoytash100% (1)
- EarthingDocument8 pagesEarthingSatyender Kumar Jain100% (1)
- Physics of Electromagnetic Calorimeters Based On Crystal ScintillatorsDocument49 pagesPhysics of Electromagnetic Calorimeters Based On Crystal ScintillatorsVigneshRamakrishnanNo ratings yet
- Assignment 1 (ELE8306 - 21)Document5 pagesAssignment 1 (ELE8306 - 21)umarsaboNo ratings yet
- Reiki Is A Great Tool For Stress Reduction and Relaxation (!)Document16 pagesReiki Is A Great Tool For Stress Reduction and Relaxation (!)vaniaNo ratings yet
- Aashto T 99-81Document7 pagesAashto T 99-81ORUSNo ratings yet
- Chemical Thermodynamics: Module - 4Document25 pagesChemical Thermodynamics: Module - 4TeachingTrainingCoaching KnowledgeSharingSessionNo ratings yet
- APEGBC Eng Syllabus MechanicalDocument22 pagesAPEGBC Eng Syllabus MechanicalbaljinderNo ratings yet
- JJHJHHJHDocument6 pagesJJHJHHJHjayarNo ratings yet