You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Siemens PLC s7 1200Document71 pagesSiemens PLC s7 1200Mahadzir Bin Mat Rabi'No ratings yet
- Azure Fundamentals (AZ-900)Document56 pagesAzure Fundamentals (AZ-900)VictorNo ratings yet
- Set Commands JuniperDocument2 pagesSet Commands Juniperjamski1200No ratings yet
- Alcatel 1660SM OperationDocument71 pagesAlcatel 1660SM OperationSukri Ansar100% (1)
- Powersploit Cheat Sheet: Getting StartedDocument2 pagesPowersploit Cheat Sheet: Getting Startedcayu8138No ratings yet
- Lecture3 Os SupportDocument20 pagesLecture3 Os SupporthanhndNo ratings yet
- Networking Basics Chapter 04Document33 pagesNetworking Basics Chapter 04Dhananjay KumbharNo ratings yet
- Product Spec DH 725 Jan.2019Document11 pagesProduct Spec DH 725 Jan.2019jun amaroNo ratings yet
- LintDocument13 pagesLintKingston 546No ratings yet
- Finger Print Based Electronic Voting MachineDocument93 pagesFinger Print Based Electronic Voting Machinehar420100% (1)
- UM1237Document166 pagesUM1237KifNo ratings yet
- ST7735SDocument201 pagesST7735Sblandinette momoNo ratings yet
- Writing The USRP File System Disk Image To A SD CardDocument2 pagesWriting The USRP File System Disk Image To A SD Cardmxyzptlk0072001No ratings yet
- Stop and Wait Protocol Using NS2Document7 pagesStop and Wait Protocol Using NS2miraclesureshNo ratings yet
- PIC18F4520 Instruction SetDocument4 pagesPIC18F4520 Instruction SetCongtan94No ratings yet
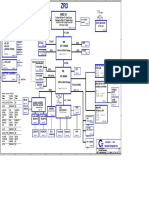
- Acer Aspire AOD255 ddr3 La-6421p PDFDocument39 pagesAcer Aspire AOD255 ddr3 La-6421p PDFRilix StoreNo ratings yet
- Acer Aspire 3050, 5050 Quanta ZR3 DA0ZR3MB6E0 DA0ZR3MB6C1Document31 pagesAcer Aspire 3050, 5050 Quanta ZR3 DA0ZR3MB6E0 DA0ZR3MB6C1essemirNo ratings yet
- NS2 (Network Simulator Version 2) ManualDocument9 pagesNS2 (Network Simulator Version 2) Manualsathya_mca17No ratings yet
- Statement Purpose:: CCSXXX Lab ManualDocument19 pagesStatement Purpose:: CCSXXX Lab ManualSaleem IqbalNo ratings yet
- PhilNITS PracticeExam 1Document5 pagesPhilNITS PracticeExam 1Melchor GazmenNo ratings yet
- Address Multiplexing - Hardware Structure of 8086Document57 pagesAddress Multiplexing - Hardware Structure of 8086Mike ThomsonNo ratings yet
- 0006-Configuring Profibus DP Network QJ71PB92V-FX3U-32DP.Document17 pages0006-Configuring Profibus DP Network QJ71PB92V-FX3U-32DP.Pham LongNo ratings yet
- Cs Project AcknowledgementDocument4 pagesCs Project AcknowledgementShyamdanielNo ratings yet
- Network SegregationDocument13 pagesNetwork SegregationsolbahiaNo ratings yet
- Yass Programming Model 1tutorialDocument12 pagesYass Programming Model 1tutorialSarvang JainNo ratings yet
- NVM Express 1 - 4 2019.06.10 Ratified PDFDocument403 pagesNVM Express 1 - 4 2019.06.10 Ratified PDFMohd MayurNo ratings yet
- IEEE 802.1Q-In-Q VLAN Tag TerminationDocument26 pagesIEEE 802.1Q-In-Q VLAN Tag TerminationNguyễn Thị Thuỳ AnhNo ratings yet
- S7 Status ErrorsDocument2 pagesS7 Status Errorsterranohr0% (1)
- SoftwareDocument22 pagesSoftwaremarcoscastillomorezuNo ratings yet