You might also like
- Four Wheel Steering System DocumentDocument20 pagesFour Wheel Steering System DocumentBala comfortNo ratings yet
- Tribhuvan University Institute of Engineering Thapathali CampusDocument10 pagesTribhuvan University Institute of Engineering Thapathali CampusRustam Alee KhanNo ratings yet
- Four Wheel Steering ReportDocument8 pagesFour Wheel Steering Reportvijayan m g100% (12)
- Project SynapsisDocument6 pagesProject Synapsisnayan RNo ratings yet
- Study of Four Wheel Steering Mechanism: JournalDocument4 pagesStudy of Four Wheel Steering Mechanism: JournalSiva HariNo ratings yet
- Four WheelDocument14 pagesFour WheelMaheshNo ratings yet
- Embedded Systems in Automobile Seminar ReportDocument39 pagesEmbedded Systems in Automobile Seminar ReportbharathNo ratings yet
- Six Wheel Three Mode Steering System PDFDocument6 pagesSix Wheel Three Mode Steering System PDFSEELAM HARSHAVARDHANREDDYNo ratings yet
- B.V'S Jawaharlal Nehru Institute of TechnologyDocument25 pagesB.V'S Jawaharlal Nehru Institute of TechnologyShaikh NihalNo ratings yet
- Crab Steering MechanismDocument15 pagesCrab Steering MechanismMohan BhalmeNo ratings yet
- Dual Mode Four Wheel Steering System: Sanu Adolphus Sooraj AbrahamDocument7 pagesDual Mode Four Wheel Steering System: Sanu Adolphus Sooraj AbrahamVincent RobinsonNo ratings yet
- 4WS System Reduces Turning Radius by 64.4Document8 pages4WS System Reduces Turning Radius by 64.4Pawan mehtaNo ratings yet
- Four-Wheel Steering Vehicle Controls System SynopsisDocument8 pagesFour-Wheel Steering Vehicle Controls System SynopsisManoj MalikNo ratings yet
- Development of Four Wheel Steering System For A Car: K. Lohith, Dr. S. R. Shankapal, M. H. Monish GowdaDocument8 pagesDevelopment of Four Wheel Steering System For A Car: K. Lohith, Dr. S. R. Shankapal, M. H. Monish GowdaGaurav PandeyNo ratings yet
- Four-Wheel SteeringDocument17 pagesFour-Wheel SteeringSarang VasugadeNo ratings yet
- Four-wheel steering improves vehicle handlingDocument2 pagesFour-wheel steering improves vehicle handlingPrateek RajNo ratings yet
- Hilal Ahmad 1Document42 pagesHilal Ahmad 1Moin ul IslamNo ratings yet
- 90 Degree Turning Motorized Steering MechanismDocument62 pages90 Degree Turning Motorized Steering MechanismMani Kandan100% (1)
- Be-Automobile Lab ManualDocument42 pagesBe-Automobile Lab ManualA.j. Jain100% (1)
- Project Seminor Final ReviewDocument17 pagesProject Seminor Final ReviewDr.KVSRIT PrincipalNo ratings yet
- Fabrication of Four Wheel Steering System: Suraj Kumar Sumit Kumar Vikash Kumar Vivek Singh YadavDocument20 pagesFabrication of Four Wheel Steering System: Suraj Kumar Sumit Kumar Vikash Kumar Vivek Singh Yadavvishnu9746567525No ratings yet
- Automobile Lab ManualDocument35 pagesAutomobile Lab ManualKeshav AsopaNo ratings yet
- Four Wheel Steering SystemDocument26 pagesFour Wheel Steering SystemRavindra Singh RathoreNo ratings yet
- Four Wheel Steering SystemDocument14 pagesFour Wheel Steering SystemChakri KankipatiNo ratings yet
- Kms4wssystem 170623171501 PDFDocument47 pagesKms4wssystem 170623171501 PDFajayNo ratings yet
- Fabrication of Four Wheel Steering SystemDocument14 pagesFabrication of Four Wheel Steering SystemRenju PaulNo ratings yet
- Four-Wheel Steering ReportDocument6 pagesFour-Wheel Steering ReportMàñjü SPNo ratings yet
- Chain Operated Quadra Steering MechanismDocument5 pagesChain Operated Quadra Steering MechanismIJIRSTNo ratings yet
- Volume 2 Issue4Document8 pagesVolume 2 Issue4Bablu BeheraNo ratings yet
- Four Wheel Steering SystemDocument12 pagesFour Wheel Steering Systemvijayan m gNo ratings yet
- 4 Wheel Steering SystemDocument7 pages4 Wheel Steering Systemबृज भूषण सिंह100% (1)
- Four Wheel Steering ReportDocument8 pagesFour Wheel Steering ReportPradyumna Keshari NahakNo ratings yet
- Fabrication of Four Wheel Steering MechanismDocument50 pagesFabrication of Four Wheel Steering MechanismMechWindNaniNo ratings yet
- AbstractDocument2 pagesAbstractChetan SharmaNo ratings yet
- 3 Mode SteeringDocument30 pages3 Mode SteeringAnonymous j0aO95fgNo ratings yet
- Four Wheel Steering System Reduces Turning Radius by 30Document11 pagesFour Wheel Steering System Reduces Turning Radius by 30elangandhiNo ratings yet
- Internship Report: P.V.K.K Institute of TechnologyDocument26 pagesInternship Report: P.V.K.K Institute of TechnologyNaveen Kumar AgisamNo ratings yet
- Fabrication of Four Wheel Steering System With Accident Avoidance Brake SystemDocument9 pagesFabrication of Four Wheel Steering System With Accident Avoidance Brake SystemganeshNo ratings yet
- Three Mode Steering System For Light Weight Automobile VehiclesDocument4 pagesThree Mode Steering System For Light Weight Automobile VehiclesKarthik kNo ratings yet
- Steering Mechanism With Zero Turning RadiusDocument19 pagesSteering Mechanism With Zero Turning RadiusAbhay RanjanNo ratings yet
- Wheel Steering System PDFDocument6 pagesWheel Steering System PDFvivek ghoriNo ratings yet
- 1.automobile Lab ManualDocument44 pages1.automobile Lab Manualharshita gupta100% (1)
- Automobile Engineering Lab Manual For B E Mechanical by D S DabhadeDocument44 pagesAutomobile Engineering Lab Manual For B E Mechanical by D S DabhadeСергей ДороховNo ratings yet
- Ninty Degree SteeringDocument48 pagesNinty Degree Steeringparas bhogulkarNo ratings yet
- Design of Accurate Steering Gear MechanismDocument12 pagesDesign of Accurate Steering Gear Mechanismtarik RymNo ratings yet
- Design of Accurate Steering Gear MechanismDocument12 pagesDesign of Accurate Steering Gear Mechanism1DA17ME055 Harshit MDNo ratings yet
- Ackerman Steering Mechanis1Document22 pagesAckerman Steering Mechanis1Ninad MirajgaonkarNo ratings yet
- 4 Wheel Steering SystemsDocument5 pages4 Wheel Steering SystemsVishal VsNo ratings yet
- Automobile Engineering Lab Manual For B E Mechanical by D S DabhadeDocument44 pagesAutomobile Engineering Lab Manual For B E Mechanical by D S DabhadeAman SarfarazNo ratings yet
- Paper On Calculation PDFDocument5 pagesPaper On Calculation PDFAnonymous Gm9VGRmVoNo ratings yet
- Four-Wheel Steering Mechanism - ReviewDocument4 pagesFour-Wheel Steering Mechanism - ReviewRajatNo ratings yet
- Steering SystemDocument12 pagesSteering Systemmayur_lanjewarNo ratings yet
- 4WS On Formula Student Racing CarDocument12 pages4WS On Formula Student Racing CarVictorNo ratings yet
- Four Wheel Steering System Full Seminar ReportDocument19 pagesFour Wheel Steering System Full Seminar ReportYashwanth Raj50% (6)
- Us Army CC Od1007 Wheeled Vehicle Steering SystemsDocument54 pagesUs Army CC Od1007 Wheeled Vehicle Steering SystemsAlex Cooper PronoveNo ratings yet
- Four Wheel SteeringDocument5 pagesFour Wheel SteeringMectrosoft Creative technologyNo ratings yet
- Four-Wheel Steering ReportDocument21 pagesFour-Wheel Steering ReportMuralee Dharan PillaiNo ratings yet
- Mechanical GovernorDocument14 pagesMechanical GovernorSrêyas Raj PkNo ratings yet
- Screenshot - 2017 03 18 07 21 39Document1 pageScreenshot - 2017 03 18 07 21 39Srêyas Raj PkNo ratings yet
- Contact: 9080911189 9500977007Document10 pagesContact: 9080911189 9500977007Srêyas Raj PkNo ratings yet
- Screenshot - 2017 03 18 07 21 21Document1 pageScreenshot - 2017 03 18 07 21 21Srêyas Raj PkNo ratings yet
- Applications of 4WsDocument2 pagesApplications of 4WsSrêyas Raj PkNo ratings yet
- Screenshot - 2017 03 18 07 24 05Document1 pageScreenshot - 2017 03 18 07 24 05Srêyas Raj PkNo ratings yet
- Welcome: Presentation On Air Bearing By-Ketan SheteDocument15 pagesWelcome: Presentation On Air Bearing By-Ketan SheteSrêyas Raj PkNo ratings yet
- Screenshot - 2017 03 18 07 22 35Document2 pagesScreenshot - 2017 03 18 07 22 35Srêyas Raj PkNo ratings yet
- Screenshot - 2017 03 18 07 22 35Document2 pagesScreenshot - 2017 03 18 07 22 35Srêyas Raj PkNo ratings yet
- Screenshot - 2017 03 18 07 22 35Document2 pagesScreenshot - 2017 03 18 07 22 35Srêyas Raj PkNo ratings yet
- The Top 10 Strategic Technology Trends For 2020: Tomas Huseby Executive PartnerDocument31 pagesThe Top 10 Strategic Technology Trends For 2020: Tomas Huseby Executive PartnerCarlos Stuars Echeandia CastilloNo ratings yet
- Fi 7160Document2 pagesFi 7160maxis2022No ratings yet
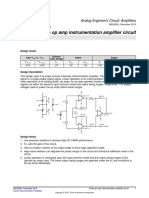
- Opamp TIDocument5 pagesOpamp TIAmogh Gajaré100% (1)
- Priming An Airplane EngineDocument6 pagesPriming An Airplane Enginejmoore4678No ratings yet
- Influence of Social Media on Youth Brand Choice in IndiaDocument7 pagesInfluence of Social Media on Youth Brand Choice in IndiaSukashiny Sandran LeeNo ratings yet
- Amma dedicates 'Green Year' to environmental protection effortsDocument22 pagesAmma dedicates 'Green Year' to environmental protection effortsOlivia WilliamsNo ratings yet
- Bikini - USA - 03.2017Document68 pagesBikini - USA - 03.2017OvidiuNo ratings yet
- Indra: Detail Pre-Commissioning Procedure For Service Test of Service Water For Unit 040/041/042/043Document28 pagesIndra: Detail Pre-Commissioning Procedure For Service Test of Service Water For Unit 040/041/042/043AnhTuấnPhanNo ratings yet
- 2113T Feasibility Study TempateDocument27 pages2113T Feasibility Study TempateRA MagallanesNo ratings yet
- A. What Is Balanced/objective Review or Criticism?Document11 pagesA. What Is Balanced/objective Review or Criticism?Risha Ann CortesNo ratings yet
- Yamaha RX-A3000 - V3067Document197 pagesYamaha RX-A3000 - V3067jaysonNo ratings yet
- Goes 300 S Service ManualDocument188 pagesGoes 300 S Service ManualШурик КамушкинNo ratings yet
- 2020 - Audcap1 - 2.3 RCCM - BunagDocument1 page2020 - Audcap1 - 2.3 RCCM - BunagSherilyn BunagNo ratings yet
- Effects of War On EconomyDocument7 pagesEffects of War On Economyapi-3721555100% (1)
- What Is Chemical EngineeringDocument4 pagesWhat Is Chemical EngineeringgersonNo ratings yet
- John Williams - WikipediaDocument2 pagesJohn Williams - Wikipedia三木和代No ratings yet
- Purp Com Lesson 1.2Document2 pagesPurp Com Lesson 1.2bualjuldeeangelNo ratings yet
- Benefits of Eating OkraDocument4 pagesBenefits of Eating Okraama931No ratings yet
- Illegal FishingDocument1 pageIllegal FishingDita DwynNo ratings yet
- Chapter 04Document3 pagesChapter 04gebreNo ratings yet
- 6a. ICMR STSDocument15 pages6a. ICMR STSVishnu Praba ANo ratings yet
- PSAII Final EXAMDocument15 pagesPSAII Final EXAMdaveadeNo ratings yet
- MP & MC Module-4Document72 pagesMP & MC Module-4jeezNo ratings yet
- Imp RssDocument8 pagesImp RssPriya SharmaNo ratings yet
- 4th Summative Test Science 6Document5 pages4th Summative Test Science 6ANNALIZA FIECASNo ratings yet
- Complex Numbers GuideDocument17 pagesComplex Numbers GuideGus EdiNo ratings yet
- Lec 5Document22 pagesLec 5Abcdefgh EfghabcdNo ratings yet
- EE114-1 Homework 2: Building Electrical SystemsDocument2 pagesEE114-1 Homework 2: Building Electrical SystemsGuiaSanchezNo ratings yet
- Aveva Installation GuideDocument48 pagesAveva Installation GuideNico Van HoofNo ratings yet
- 2 Case StudyDocument8 pages2 Case Studysehrish khawerNo ratings yet