You might also like
- 100 TOP C PROGRAMMING Interview Questions and AnswersDocument11 pages100 TOP C PROGRAMMING Interview Questions and AnswersVaishakh SasikumarNo ratings yet
- Cerner QuestionsDocument18 pagesCerner Questionsavid_reader_new50% (2)
- Backpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningFrom EverandBackpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningNo ratings yet
- 18bce0537 VL2020210104308 Pe003Document31 pages18bce0537 VL2020210104308 Pe003CHALASANI AKHIL CHOWDARY 19BCE2390No ratings yet
- Dijkstra's Algorithm ExplainedDocument30 pagesDijkstra's Algorithm ExplainedFaizan Ali100% (1)
- 260 Assignment 71Document10 pages260 Assignment 71very confusedNo ratings yet
- Project 2: Comparing Clustering AlgorithmsDocument15 pagesProject 2: Comparing Clustering AlgorithmsvedurupakaNo ratings yet
- Kruskal PascalDocument13 pagesKruskal PascalIonut MarinNo ratings yet
- Dijkstra's Algorithm Implementation in Digital ASIC.Document7 pagesDijkstra's Algorithm Implementation in Digital ASIC.Ajit NarwalNo ratings yet
- GPU Accelerated Two-Point Angular Correlation FunctionDocument8 pagesGPU Accelerated Two-Point Angular Correlation Functionalbertucu3No ratings yet
- Code ReviewDocument5 pagesCode ReviewbaremuarNo ratings yet
- Assignment (2016 EE 384)Document8 pagesAssignment (2016 EE 384)Nazish KhalidNo ratings yet
- Parallel Mapreduce: K - Means Clustering Based OnDocument6 pagesParallel Mapreduce: K - Means Clustering Based OnAshishNo ratings yet
- .Archassignment 5 RoutePlanner v21.1Document6 pages.Archassignment 5 RoutePlanner v21.1Muzammil LiaquatNo ratings yet
- An Improved Dijkstra's Algorithm Application To Multi-Core ProcessorsDocument6 pagesAn Improved Dijkstra's Algorithm Application To Multi-Core ProcessorsJaveriya FarheenNo ratings yet
- Core 14Document28 pagesCore 14swadhinatadash805No ratings yet
- 2008 Basics DDM FEADocument24 pages2008 Basics DDM FEAwhateverNo ratings yet
- Chapter Parallel Prefix SumDocument21 pagesChapter Parallel Prefix SumAimee ReynoldsNo ratings yet
- MapReduce: Simplified Data Processing On Large ClustersDocument13 pagesMapReduce: Simplified Data Processing On Large Clusterszzztimbo100% (1)
- Cadence Spectre Matlab ToolboxDocument11 pagesCadence Spectre Matlab Toolboxabhi_nxp0% (1)
- Bda Experiment 5: Roll No. A-52 Name: Janmejay Patil Class: BE-A Batch: A3 Date of Experiment: Date of Submission GradeDocument5 pagesBda Experiment 5: Roll No. A-52 Name: Janmejay Patil Class: BE-A Batch: A3 Date of Experiment: Date of Submission GradeAlkaNo ratings yet
- Sparse autoencoder implementation for natural imagesDocument5 pagesSparse autoencoder implementation for natural imagesJoseNo ratings yet
- Data Structures and Algorithms II Fall 2019 Programming Assignment #3Document3 pagesData Structures and Algorithms II Fall 2019 Programming Assignment #3ILIAS PROKONo ratings yet
- COMP 429 PARALLEL PROGRAMMING TERM PROJECT REPORTDocument9 pagesCOMP 429 PARALLEL PROGRAMMING TERM PROJECT REPORTGeorgianaNo ratings yet
- MapReduce Patterns, Algorithms, and Use Cases - Highly Scalable BlogDocument7 pagesMapReduce Patterns, Algorithms, and Use Cases - Highly Scalable BlogjefferyleclercNo ratings yet
- Course designDocument23 pagesCourse designaimn1766No ratings yet
- This Article Explains DijkstraDocument4 pagesThis Article Explains Dijkstravarshney8465No ratings yet
- Dijkstra's Shortest Path Algorithm Serial and Parallel Execution Performance AnalysisDocument5 pagesDijkstra's Shortest Path Algorithm Serial and Parallel Execution Performance AnalysisMircea TrifanNo ratings yet
- Mapreduce Programming Model and Design Patterns: Andrea Lottarini January 17, 2012Document23 pagesMapreduce Programming Model and Design Patterns: Andrea Lottarini January 17, 2012Andrea LottariniNo ratings yet
- Lab1 1Document10 pagesLab1 1Bogdan LupeNo ratings yet
- Design and Analysis of Algorithms (COM336) : Dijkstra's AlgorithmDocument3 pagesDesign and Analysis of Algorithms (COM336) : Dijkstra's AlgorithmffNo ratings yet
- C For EveryoneDocument5 pagesC For EveryoneVrushabh WarkeNo ratings yet
- Session 3.8Document17 pagesSession 3.8dhurgadeviNo ratings yet
- Laboratory 1 Discrete and Continuous-Time SignalsDocument8 pagesLaboratory 1 Discrete and Continuous-Time SignalsYasitha Kanchana ManathungaNo ratings yet
- Java Based Visualization and Animation For Teaching The Dijkstra Shortest Path Algorithm in Transportation NetworksDocument15 pagesJava Based Visualization and Animation For Teaching The Dijkstra Shortest Path Algorithm in Transportation NetworksAnonymous rVWvjCRLG100% (1)
- Lecture 10 MapReduce HadoopDocument37 pagesLecture 10 MapReduce HadoopDAVID HUMBERTO GUTIERREZ MARTINEZNo ratings yet
- Ecs765p W2Document55 pagesEcs765p W2Yen-Kai ChengNo ratings yet
- Cgraph TutorialDocument31 pagesCgraph TutorialAmy ZobermanNo ratings yet
- JIEEE_V003_Iss01_Sn007Document17 pagesJIEEE_V003_Iss01_Sn007bot56mailNo ratings yet
- Dijkstra's Algorithm Lab ReportDocument6 pagesDijkstra's Algorithm Lab Reportpixaho2996No ratings yet
- Map Reduce Algorithm 1Document2 pagesMap Reduce Algorithm 1jefferyleclercNo ratings yet
- Linear Regression Operations AnalyticsDocument10 pagesLinear Regression Operations Analyticsyash mahindreNo ratings yet
- Eyvazov-Parallel Calculation To Find Shortest Path by Applying Dijkstra AlgorithmDocument4 pagesEyvazov-Parallel Calculation To Find Shortest Path by Applying Dijkstra AlgorithmRediet YitagesuNo ratings yet
- Assignment 3Document6 pagesAssignment 3Aayush MittalNo ratings yet
- University of Engineering and Technology Lahore: Lab 12: Graphs - Adjacency Matrix RepresentationDocument3 pagesUniversity of Engineering and Technology Lahore: Lab 12: Graphs - Adjacency Matrix RepresentationKashafNo ratings yet
- Eda Lab ManualDocument25 pagesEda Lab ManualAthiraRemeshNo ratings yet
- Unit-2 [MapReduce-I]Document28 pagesUnit-2 [MapReduce-I]tripathineeharikaNo ratings yet
- Stream Network and Watershed Delineation Using Spatial Analyst Hydrology ToolsDocument16 pagesStream Network and Watershed Delineation Using Spatial Analyst Hydrology ToolsGeo SpatialistNo ratings yet
- SPARK GraphxDocument15 pagesSPARK GraphxRohit RanjanNo ratings yet
- MultithreadDocument3 pagesMultithreadkhadijaNo ratings yet
- Dean 08 Map ReduceDocument7 pagesDean 08 Map ReduceLindsey HoffmanNo ratings yet
- Facebook Network Centrality AnalysisDocument9 pagesFacebook Network Centrality AnalysisGabrielNo ratings yet
- Tsinghua Introduction To Big Data Systems hw8 QuestionDocument5 pagesTsinghua Introduction To Big Data Systems hw8 QuestionjovanhuangNo ratings yet
- HW4: Merge Sort: 1 Assignment GoalDocument6 pagesHW4: Merge Sort: 1 Assignment GoalRafael MendoncaNo ratings yet
- Kd-Trees Programming Assignment FAQDocument2 pagesKd-Trees Programming Assignment FAQMax YadlovskiyNo ratings yet
- C Program To Find Shortest Path Using DijkstraDocument9 pagesC Program To Find Shortest Path Using DijkstraKosta NikolicNo ratings yet
- Floating-Point Bitwidth Analysis Via Automatic DifferentiationDocument8 pagesFloating-Point Bitwidth Analysis Via Automatic Differentiationarthur-pham-5188No ratings yet
- JUNG 2.0 Tutorial: Achieve Graph-Based Nirvana in JavaDocument16 pagesJUNG 2.0 Tutorial: Achieve Graph-Based Nirvana in JavaspzunitedNo ratings yet
- At A Glance Guide To Locum Opportunities Revised December 2014Document3 pagesAt A Glance Guide To Locum Opportunities Revised December 2014drla4No ratings yet
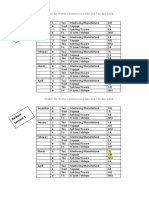
- Preaching Roster From Feb 2018Document1 pagePreaching Roster From Feb 2018drla4No ratings yet
- Sunday HymsDocument2 pagesSunday Hymsdrla4No ratings yet
- Mater Dei Pastoral Centre DirectionsDocument1 pageMater Dei Pastoral Centre Directionsdrla4No ratings yet
- Deutscher Evangelischer KirchentagDocument7 pagesDeutscher Evangelischer Kirchentagdrla4No ratings yet
- Mission Shaped Intro: Exploring Church For Those Who Do Not Do ChurchDocument1 pageMission Shaped Intro: Exploring Church For Those Who Do Not Do Churchdrla4No ratings yet
- At A Glance Guide To Locum Opportunities Revised December 2014Document3 pagesAt A Glance Guide To Locum Opportunities Revised December 2014drla4No ratings yet
- Te LucisDocument1 pageTe Lucisdrla4No ratings yet
- Mission Shaped Intro: Exploring Church For Those Who Do Not Do ChurchDocument1 pageMission Shaped Intro: Exploring Church For Those Who Do Not Do Churchdrla4No ratings yet
- The Diocese of ST Mark The Evangelist: 1 PersonalDocument2 pagesThe Diocese of ST Mark The Evangelist: 1 Personaldrla4No ratings yet
- Canon PDFDocument1 pageCanon PDFdrla4No ratings yet
- Divine Intermediaries in 1 Chronicles 21Document14 pagesDivine Intermediaries in 1 Chronicles 21alfalfalfNo ratings yet
- An Unusual Ad Clerum!: The Diocese of ST Mark The EvangelistDocument3 pagesAn Unusual Ad Clerum!: The Diocese of ST Mark The Evangelistdrla4No ratings yet
- St Mark's Lenten Message Encourages Seeking GodDocument2 pagesSt Mark's Lenten Message Encourages Seeking Goddrla4No ratings yet
- Rectors Year Plan - Release Jan 2018Document1 pageRectors Year Plan - Release Jan 2018drla4No ratings yet
- Home Communion Roster Dec 2017 To Apr 2018Document1 pageHome Communion Roster Dec 2017 To Apr 2018drla4No ratings yet
- Cohn A Visual Lexicon 2005 PDFDocument19 pagesCohn A Visual Lexicon 2005 PDFdrla4No ratings yet
- Gospel of Luke Session 1Document4 pagesGospel of Luke Session 1drla4No ratings yet
- Manual samsungM2022W PDFDocument199 pagesManual samsungM2022W PDFChirita AlexandraNo ratings yet
- Italian Headstart - Glossary (Italian Headstart - Glossary)Document63 pagesItalian Headstart - Glossary (Italian Headstart - Glossary)drla4No ratings yet
- Locating Contextual Bible Study within liberation hermeneuticsDocument21 pagesLocating Contextual Bible Study within liberation hermeneuticsdrla4100% (1)
- Iblical Evelation and Nclusive Anguage: B R I LDocument39 pagesIblical Evelation and Nclusive Anguage: B R I Ldrla4No ratings yet
- Map Tourist Guide Prague City Line Prague3 WebDocument2 pagesMap Tourist Guide Prague City Line Prague3 Webdrla4No ratings yet
- 1co1 PDFDocument6 pages1co1 PDFdrla4No ratings yet
- Learn Online NSotho - Theme 1 PDFDocument2 pagesLearn Online NSotho - Theme 1 PDFdrla4No ratings yet
- Website Poster InformationDocument1 pageWebsite Poster Informationdrla4No ratings yet
- Altar BookDocument30 pagesAltar Bookdrla4No ratings yet
- Limp WRKSH PRGRM 15Document4 pagesLimp WRKSH PRGRM 15drla4No ratings yet
- Altar BookDocument30 pagesAltar Bookdrla4No ratings yet
- LogDocument497 pagesLogEhrin Mae BalagsoNo ratings yet
- Basic ESP8266 MQTT example publishes sensor dataDocument3 pagesBasic ESP8266 MQTT example publishes sensor dataAlex Frank Meza Cárdenas100% (1)
- Regular Expressions and Its ApplicationsDocument6 pagesRegular Expressions and Its ApplicationsAminaNo ratings yet
- Velammal Bodhi Campus, Theni: Computer ScienceDocument2 pagesVelammal Bodhi Campus, Theni: Computer ScienceAircc AirccseNo ratings yet
- Cap202 - A23 - Jameel AhmadDocument9 pagesCap202 - A23 - Jameel AhmadAhmad Jameel QureshiNo ratings yet
- Process SchedulingDocument5 pagesProcess SchedulingKnoel Gen GutierrezNo ratings yet
- Data Compression KCS064Document2 pagesData Compression KCS064Shoaib SalmaniNo ratings yet
- Regular ExpressionsDocument54 pagesRegular Expressionseiman fatimaFa21079No ratings yet
- Class 16 - Doubly Linked ListDocument15 pagesClass 16 - Doubly Linked ListMaximus AranhaNo ratings yet
- Halstead's Operators and Operands in C, C++, JAVA (By Indranil Nandy)Document5 pagesHalstead's Operators and Operands in C, C++, JAVA (By Indranil Nandy)Indranil Nandy100% (6)
- CST8288 Lab1 5Document2 pagesCST8288 Lab1 5uaeotakuNo ratings yet
- Relational Model ElementsDocument1 pageRelational Model ElementsJesus Roberto Alcalde DominguezNo ratings yet
- Es26 ExamqsDocument16 pagesEs26 ExamqsJohn Justine VillarNo ratings yet
- CBCT2203 Basic Concepts of Information TechnologyDocument261 pagesCBCT2203 Basic Concepts of Information TechnologyMark YoeNo ratings yet
- Sybase SQL Cheat Sheet for Date Retrieval and ManipulationDocument2 pagesSybase SQL Cheat Sheet for Date Retrieval and Manipulationshabeer123100% (1)
- Risc-V Veer El2 Programmer's Reference Manual: December 22, 2022Document140 pagesRisc-V Veer El2 Programmer's Reference Manual: December 22, 2022Paulo D.No ratings yet
- Pointers: - Pointers and Arrays - Pointers and Structures - Pointers and Functions (Call by Address)Document21 pagesPointers: - Pointers and Arrays - Pointers and Structures - Pointers and Functions (Call by Address)ddNo ratings yet
- SemaphoresDocument3 pagesSemaphoresVignesh RenganathNo ratings yet
- Linear Programming ExercisesDocument7 pagesLinear Programming ExercisesHang PhamNo ratings yet
- Plant Simulation 15.2 Installation ENUDocument48 pagesPlant Simulation 15.2 Installation ENUTiến BùiNo ratings yet
- 003 Operating System VerifiedDocument51 pages003 Operating System VerifiedKurumeti Naga Surya Lakshmana KumarNo ratings yet
- Debugger GTMDocument57 pagesDebugger GTMcarver_uaNo ratings yet
- Connecting To Firebird DatabaseDocument7 pagesConnecting To Firebird DatabaseJaded021No ratings yet
- K MeansDocument15 pagesK MeansJEISON ANDRES GOMEZ PEDRAZANo ratings yet
- A Quick Guide For OLE DB To ODBC ConversionDocument20 pagesA Quick Guide For OLE DB To ODBC ConversionsybaritzNo ratings yet
- XII - IP - 2013-14 - Guwahati RegionDocument137 pagesXII - IP - 2013-14 - Guwahati Regionsan1507No ratings yet
- UML Test CaseDocument47 pagesUML Test CaseHiteshi VermaNo ratings yet
- Membuat Buku Tamu Menggunakan NetbeansDocument7 pagesMembuat Buku Tamu Menggunakan NetbeansGilang LenardoNo ratings yet

















































![Unit-2 [MapReduce-I]](https://imgv2-1-f.scribdassets.com/img/document/724521722/149x198/5783e8487e/1713499888?v=1)