You might also like
- Beams On Elastic Foundation 2Document8 pagesBeams On Elastic Foundation 2Mauricio Gomes de BarrosNo ratings yet
- 3D Elasticity TheoryDocument6 pages3D Elasticity TheorySaurabh PednekarNo ratings yet
- Sika MonoTop 615 PDS (CE)Document6 pagesSika MonoTop 615 PDS (CE)Mihai CîrsteaNo ratings yet
- Timoshenko BeamsDocument3 pagesTimoshenko BeamsCristina VlaicuNo ratings yet
- Technology of Building: Institute of Technology of Cambodia Faculty of Civil EngineeringDocument30 pagesTechnology of Building: Institute of Technology of Cambodia Faculty of Civil EngineeringKhum ViwathNo ratings yet
- Scia Engineer Fact Sheet: Surface Load GeneratorsDocument2 pagesScia Engineer Fact Sheet: Surface Load Generatorsadnandj100% (1)
- School of Egineering and TechnologyDocument5 pagesSchool of Egineering and TechnologyChot BensonNo ratings yet
- Extraction of External Force and Wall Reactions From NEMStatik Using Excel VBA MacroDocument19 pagesExtraction of External Force and Wall Reactions From NEMStatik Using Excel VBA MacroRonald Miguel DavidNo ratings yet
- Sigrist, Hackbarth 3rd Fib International Congress - 2010Document10 pagesSigrist, Hackbarth 3rd Fib International Congress - 2010mocker1987No ratings yet
- Reinforced Concrete Slab DesignDocument29 pagesReinforced Concrete Slab DesignMapanguriSitoeNo ratings yet
- Shear Walls Parts IV - VI: Design of Boundary ElementsDocument28 pagesShear Walls Parts IV - VI: Design of Boundary ElementsAhmad BurqanNo ratings yet
- NSCJan15 TechDocument3 pagesNSCJan15 TechskorabnNo ratings yet
- Seismic Design of Composite Metal Deck and Concrete Filled Diaphragms A Discussion Paper Cowie Hicks Macrae Clifton FussellDocument11 pagesSeismic Design of Composite Metal Deck and Concrete Filled Diaphragms A Discussion Paper Cowie Hicks Macrae Clifton Fussellmongkol_1001No ratings yet
- Calculation Deflection in Accordance To EC-2: 1.1 Design DataDocument15 pagesCalculation Deflection in Accordance To EC-2: 1.1 Design DataMisgun SamuelNo ratings yet
- 07 EC2WS Robert Conceptual Fire DesignDocument60 pages07 EC2WS Robert Conceptual Fire Designfil_coelhoNo ratings yet
- Bearing CapacityDocument17 pagesBearing Capacitysuperhero12345No ratings yet
- Uplift Capacity of Piles in Soil and RockDocument3 pagesUplift Capacity of Piles in Soil and RocknhoniepogiNo ratings yet
- PSF For Resistance of Steel Frames To Ec3 Ec4Document155 pagesPSF For Resistance of Steel Frames To Ec3 Ec4Daniel JamesNo ratings yet
- Voided SlabsDocument8 pagesVoided SlabsAnonymous dxsNnL6S8hNo ratings yet
- Volume B: Figure 4.2.2-42: The Actual Stucture in 3DDocument5 pagesVolume B: Figure 4.2.2-42: The Actual Stucture in 3DxavierlthNo ratings yet
- Analytical Solutions in Elasto-Plastic Bending of Beams With PDFDocument12 pagesAnalytical Solutions in Elasto-Plastic Bending of Beams With PDFMariusz Milewski50% (2)
- Validation - LTBeamDocument21 pagesValidation - LTBeamSimone AlfieriNo ratings yet
- L12 - Plastic Analysis PDFDocument9 pagesL12 - Plastic Analysis PDFSunil Kumar P GNo ratings yet
- Manual Kangaroo2 BR enDocument24 pagesManual Kangaroo2 BR enLeandro AthanasioNo ratings yet
- Beam On Elastic FoundationsDocument18 pagesBeam On Elastic FoundationsGaftoi Daniel Andrei100% (1)
- Permissible Crack Width ExplanationDocument4 pagesPermissible Crack Width ExplanationAntony John VianyNo ratings yet
- I. Bejtka - Cross (CLT) and Diagonal (DLT) Laminated Timber As InnovativeDocument144 pagesI. Bejtka - Cross (CLT) and Diagonal (DLT) Laminated Timber As InnovativeFredNo ratings yet
- CLTDocument59 pagesCLTLesterRiosDuranNo ratings yet
- 13 PDFDocument220 pages13 PDFPrsNo ratings yet
- Drinkwater - Sunniberg Analysis PDFDocument9 pagesDrinkwater - Sunniberg Analysis PDFRichard MnDezNo ratings yet
- Stability and Indeterminacy100Document6 pagesStability and Indeterminacy100Sarah SullivanNo ratings yet
- Elmod PDFDocument73 pagesElmod PDFSusana100% (1)
- Comparing analytical and numerical algorithms for reinforced concrete sectionsDocument10 pagesComparing analytical and numerical algorithms for reinforced concrete sectionsDong LINo ratings yet
- Design of RC ShellsDocument9 pagesDesign of RC Shellscacrcarlos100% (1)
- TST56 Welded Joints Examples 12.13 EditDocument56 pagesTST56 Welded Joints Examples 12.13 EditDaniyal AhmadNo ratings yet
- (Conectores) SandhaasC Munch-AndersenJ DietschP DesignofConnectionsinTimberStructures PDFDocument332 pages(Conectores) SandhaasC Munch-AndersenJ DietschP DesignofConnectionsinTimberStructures PDFClaudio Ignacio Zurita MillónNo ratings yet
- Nominal MomentsDocument2 pagesNominal Momentsberto2008No ratings yet
- Projektering Af Konstruktioner Med CLT, Traeinformation PDFDocument64 pagesProjektering Af Konstruktioner Med CLT, Traeinformation PDFCenascenascenascenasNo ratings yet
- DIN 1052 Checks PDFDocument22 pagesDIN 1052 Checks PDFxyzhynNo ratings yet
- Vimmr Se Fixing of Precast Concrete Columns To FoundationsDocument4 pagesVimmr Se Fixing of Precast Concrete Columns To FoundationsmagdyamdbNo ratings yet
- Reinforced Concrete Slab and Beam DesignDocument18 pagesReinforced Concrete Slab and Beam DesignGiomar OzaitaNo ratings yet
- An Improved Beam Element For Beams With Variable Axial ParametersDocument18 pagesAn Improved Beam Element For Beams With Variable Axial ParametersFaiz FebriantoNo ratings yet
- Stress AnalysisDocument18 pagesStress Analysisrasif88718100% (1)
- Seismic Performance of A 3D Full Scale HDocument27 pagesSeismic Performance of A 3D Full Scale HPravasNo ratings yet
- Lecture 1 Basics CG Apr 2013 SOLUTIONSDocument8 pagesLecture 1 Basics CG Apr 2013 SOLUTIONShuo lenghakNo ratings yet
- How Do Steel Fibers Improve The Shear Capacity of Reinforced Concrete Beams Without Stirrups?Document16 pagesHow Do Steel Fibers Improve The Shear Capacity of Reinforced Concrete Beams Without Stirrups?Thomás LimaNo ratings yet
- Analysis and Design of A Continuous R C Raker Beam Using Eurocode 2 PDFDocument13 pagesAnalysis and Design of A Continuous R C Raker Beam Using Eurocode 2 PDFMukhtaar CaseNo ratings yet
- ZollingerDocument12 pagesZollinger董思辰100% (1)
- Eurocodes in Scia EngineerDocument2 pagesEurocodes in Scia EngineeradventmanurungNo ratings yet
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionFrom EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo ratings yet
- Beams On Elastic FoundationDocument11 pagesBeams On Elastic FoundationRegie BaguionNo ratings yet
- Beams On Elastic FoundationDocument7 pagesBeams On Elastic Foundationprabhu81No ratings yet
- Euler-Bernoulli beam theory explainedDocument20 pagesEuler-Bernoulli beam theory explainedbramo96No ratings yet
- Euler Bernoulli BeamsDocument8 pagesEuler Bernoulli BeamsDorin PopaNo ratings yet
- SSI CombinedDocument142 pagesSSI CombinedTarun KumarNo ratings yet
- Warping TorsionDocument24 pagesWarping TorsionGogyNo ratings yet
- Statics of Bending Shear and Bending Moment DiagramsDocument12 pagesStatics of Bending Shear and Bending Moment Diagramsapi-3710585100% (1)
- David Mateos and Paul K. Townsend - SupertubesDocument4 pagesDavid Mateos and Paul K. Townsend - SupertubesHuntsmithNo ratings yet
- Chapter 11 Strain Energy MethodDocument41 pagesChapter 11 Strain Energy MethodAfia S HameedNo ratings yet
- Astm D790-03Document11 pagesAstm D790-03breynnero100% (2)
- SOLIDWORKS Material Properties for Simulation StudiesDocument4 pagesSOLIDWORKS Material Properties for Simulation StudiesJorge GtzNo ratings yet
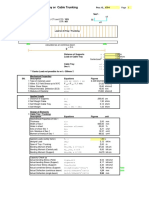
- Steel cable tray design and load calculationsDocument6 pagesSteel cable tray design and load calculationsyusuf_jtNo ratings yet
- Pemodelan Struktur (Kuliah As3)Document144 pagesPemodelan Struktur (Kuliah As3)Bogie Prastowo MahardhikaNo ratings yet
- MECH60561 2022 23 Pressure Vessel ExerciseDocument3 pagesMECH60561 2022 23 Pressure Vessel ExerciseAli JabranNo ratings yet
- Structures: SciencedirectDocument10 pagesStructures: Sciencedirecthemantkle2uNo ratings yet
- Uplift Capacity T-Z MethodDocument5 pagesUplift Capacity T-Z MethodPalak ShivhareNo ratings yet
- 19 - ZhongDocument8 pages19 - ZhongJasmina TodorovićNo ratings yet
- Unit Vi. Polymeric Materials: Topic OutlineDocument13 pagesUnit Vi. Polymeric Materials: Topic OutlineIvyy Joyce BuanNo ratings yet
- Refractories en WebDocument28 pagesRefractories en WebSamuelHericNo ratings yet
- 2 2Document212 pages2 2mahesh100% (1)
- Design of Slab For Bending: Benchmark Example No. 1Document6 pagesDesign of Slab For Bending: Benchmark Example No. 1Sri RamNo ratings yet
- Stress-Strain Relationships and Material BehaviorDocument4 pagesStress-Strain Relationships and Material BehaviorRonee PangilinanNo ratings yet
- Settle3D v4 TheoryDocument61 pagesSettle3D v4 TheoryPeteris SkelsNo ratings yet
- Stability of Structures PDFDocument11 pagesStability of Structures PDFHari Krishna MoorthyNo ratings yet
- Construction and Building Materials: R. Jayathilakage, P. Rajeev, J.G. SanjayanDocument15 pagesConstruction and Building Materials: R. Jayathilakage, P. Rajeev, J.G. SanjayanficuniNo ratings yet
- 3rd Term PhysicsDocument14 pages3rd Term Physicssaidu musaNo ratings yet
- Chapter - 9 Mechanical Properties of SolidsDocument19 pagesChapter - 9 Mechanical Properties of SolidsTilahun ArfichoNo ratings yet
- ISRM-Is-1978-019Three Practical Examples For The Interaction Between Concrete Dams and Foundation RockDocument26 pagesISRM-Is-1978-019Three Practical Examples For The Interaction Between Concrete Dams and Foundation Rockamy75No ratings yet
- 13 Seat Belt Anchorage Analysis (ECER14)Document6 pages13 Seat Belt Anchorage Analysis (ECER14)JayDeep KhajureNo ratings yet
- 04 - Analysis Reference - Chapter 4 MaterialsDocument124 pages04 - Analysis Reference - Chapter 4 MaterialsSafwat El RoubyNo ratings yet
- Experiment 1-Tensile TestDocument7 pagesExperiment 1-Tensile Testhazriel83% (6)
- Refra. DictionaryDocument15 pagesRefra. DictionaryjagrutNo ratings yet
- YOUNG'S MODULUS TESTDocument3 pagesYOUNG'S MODULUS TESTkayode oluwarotimiNo ratings yet
- Raft Modeling in Etabs - Foundation Design - Structural Engineering Forum of Pakistan PDFDocument1 pageRaft Modeling in Etabs - Foundation Design - Structural Engineering Forum of Pakistan PDFKenny Manuel Vettoor100% (1)
- Liquid natural rubber improves nitrile rubber processingDocument12 pagesLiquid natural rubber improves nitrile rubber processingThai KhangNo ratings yet
- Mechanical properties of blocks from recycled materialsDocument12 pagesMechanical properties of blocks from recycled materialsTejinder KumarNo ratings yet
- Deflection LabDocument9 pagesDeflection LabFarid NajandNo ratings yet
- MRSPTU M.tech. Mechanical Engg. (Sem 1-4) Syllabus Updated On 19.3.2017Document15 pagesMRSPTU M.tech. Mechanical Engg. (Sem 1-4) Syllabus Updated On 19.3.2017Robin NanchahalNo ratings yet