You might also like
- Manual Kit Iniciante - Rev.3Document134 pagesManual Kit Iniciante - Rev.3Felipe Costa100% (1)
- GNV-manual TécnicoDocument24 pagesGNV-manual TécnicoJuliano Oliveira100% (3)
- Fundamentos Da HarmoniaDocument108 pagesFundamentos Da HarmoniaJoao Roberto Pereira100% (3)
- R220LC 9SDocument16 pagesR220LC 9SAntonio SergioNo ratings yet
- Checklist Projeto TCC: Guia para Elaboração de Trabalhos de Conclusão de CursoDocument3 pagesChecklist Projeto TCC: Guia para Elaboração de Trabalhos de Conclusão de CursoDouglas Petrin BertiniNo ratings yet
- Resumo EletrodinâmicaDocument2 pagesResumo EletrodinâmicaPedro AffonsoNo ratings yet
- Física - VetoresDocument29 pagesFísica - VetoresPedro AffonsoNo ratings yet
- Programa 1 Semestre-IUSC2017Document14 pagesPrograma 1 Semestre-IUSC2017Pedro AffonsoNo ratings yet
- Caderno de Ciências HumanasDocument152 pagesCaderno de Ciências HumanasAllan GustavoNo ratings yet
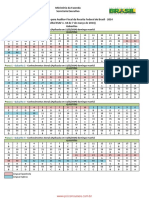
- Gabarito Preliminar PDFDocument2 pagesGabarito Preliminar PDFPedro AffonsoNo ratings yet
- Protocolo MQTTDocument21 pagesProtocolo MQTTPedro AffonsoNo ratings yet
- MQTT-SN protocol e exemplosDocument14 pagesMQTT-SN protocol e exemplosPedro AffonsoNo ratings yet
- Caderno de Ciências HumanasDocument152 pagesCaderno de Ciências HumanasAllan GustavoNo ratings yet
- Livro Apost 01Document8 pagesLivro Apost 01Pedro AffonsoNo ratings yet
- 21-Diagrama Ferro - CarbonoDocument19 pages21-Diagrama Ferro - CarbonoLucas SeverinNo ratings yet
- Unidades de Medidas e Algarismo SignificativoDocument10 pagesUnidades de Medidas e Algarismo SignificativoGeilson SilvaNo ratings yet
- Modelo de SolowDocument3 pagesModelo de Solowvunge1No ratings yet
- Curso Config Manut PLC 9030Document24 pagesCurso Config Manut PLC 9030Wilson KnuppNo ratings yet
- Asfier 121 - FispqDocument15 pagesAsfier 121 - FispqRodrigo PiniNo ratings yet
- Sistema ARCS RefinadorDocument23 pagesSistema ARCS RefinadorElwis PinheiroNo ratings yet
- Crônicas de Um Engenheiro Recém-FormadoDocument8 pagesCrônicas de Um Engenheiro Recém-FormadoMarcos QueirózNo ratings yet
- Lista GeologiaDocument7 pagesLista GeologiaROBSON DE OLIVEIRA LEMESNo ratings yet
- Catalogo FWcell JulhoDocument29 pagesCatalogo FWcell JulhoProfessor Carlos AugustoNo ratings yet
- Análise de Risco IncêndioDocument2 pagesAnálise de Risco IncêndioFpe SygmaNo ratings yet
- POO Aula02Document44 pagesPOO Aula02José Peterson DesenvolvedorNo ratings yet
- Cardiomax Ecg Resp Desf MP - 03-11-15 PDFDocument3 pagesCardiomax Ecg Resp Desf MP - 03-11-15 PDFMarcelo SouzaNo ratings yet
- Reevisão Segundo AnoDocument3 pagesReevisão Segundo AnosrfesjiunNo ratings yet
- Aula 1. Introducao GGDocument23 pagesAula 1. Introducao GGJerónimo LourençoNo ratings yet
- Religiões, seitas e a BíbliaDocument103 pagesReligiões, seitas e a BíbliaFernandoPires100% (2)
- Medição de ângulos com goniômetroDocument6 pagesMedição de ângulos com goniômetroAnonymous 1FAJCknl8No ratings yet
- 1.13.01.192 Rad700 Ver1.09 Manual-De-FalhasDocument424 pages1.13.01.192 Rad700 Ver1.09 Manual-De-FalhasGuto Gtturbo100% (5)
- Programação 2021 - SET 400Document2 pagesProgramação 2021 - SET 400lua senNo ratings yet
- PUC Sistemas Digitais Multivibrador AstávelDocument60 pagesPUC Sistemas Digitais Multivibrador AstávelIsaac BarrosNo ratings yet
- Https WWW - Acafe.org - BR New Vestibular Acervo 2014 1 Prova OutrosDocument2 pagesHttps WWW - Acafe.org - BR New Vestibular Acervo 2014 1 Prova Outrosgabriellschmit0% (1)
- Avaliação da Metodologia do Teste de Germinação em Sementes de TomateDocument7 pagesAvaliação da Metodologia do Teste de Germinação em Sementes de TomateDaniel DavidNo ratings yet
- Esteira separadora objetos sensores pneumáticaDocument6 pagesEsteira separadora objetos sensores pneumáticaRobert Ximenes100% (1)
- Roteiro Das Avaliações Parciais - 9 SérieDocument2 pagesRoteiro Das Avaliações Parciais - 9 Sérienicolelacerda250qNo ratings yet
- Thomann Retoure 3834507Document2 pagesThomann Retoure 3834507Rodrigo FerreiraNo ratings yet