You might also like
- Reducc de Pérdidas Aprob Web PDFDocument34 pagesReducc de Pérdidas Aprob Web PDFKriizthiian HuiisaNo ratings yet
- Estructuras Decision Semana 03Document8 pagesEstructuras Decision Semana 03Kriizthiian HuiisaNo ratings yet
- DentalDocument20 pagesDentalKriizthiian HuiisaNo ratings yet
- Sistmas D TX Fbra OptcaDocument39 pagesSistmas D TX Fbra OptcaKriizthiian HuiisaNo ratings yet
- FTI-Factores Afectan ComunicacionDocument14 pagesFTI-Factores Afectan ComunicacionDayana ValentinaNo ratings yet
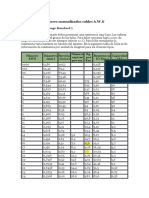
- Valores Normalizados Cables ADocument6 pagesValores Normalizados Cables AYeferson RodriguezNo ratings yet
- CALCULO Sat ModificadoDocument13 pagesCALCULO Sat ModificadoKriizthiian HuiisaNo ratings yet
- Corte Penal InternacionalDocument3 pagesCorte Penal InternacionalKriizthiian HuiisaNo ratings yet
- 8.5 Calculo Enlace 2 PDFDocument13 pages8.5 Calculo Enlace 2 PDFKriizthiian HuiisaNo ratings yet
- Leyes de KirchhoffDocument6 pagesLeyes de KirchhoffflavioscrNo ratings yet
- Cerradura Electrónica Operada A DistanciaDocument7 pagesCerradura Electrónica Operada A DistanciaKriizthiian HuiisaNo ratings yet
- Contador Fotoelectrico de ObjetosDocument22 pagesContador Fotoelectrico de ObjetosIvan Valenzuela0% (2)
- Alarma luminosa DIYDocument14 pagesAlarma luminosa DIYKriizthiian HuiisaNo ratings yet
- Circuito Integrado TTL 74153Document3 pagesCircuito Integrado TTL 74153Jhoan Alexander Chunga OrdinolaNo ratings yet
- 06-07 Practica 1 AnalogicaDocument7 pages06-07 Practica 1 AnalogicaJade AguayoNo ratings yet
- Motores eléctricos aplicaciones principiosDocument23 pagesMotores eléctricos aplicaciones principiosMarcelo De Jesús DelgadoNo ratings yet
- EcuacionesDiferencialesCaracterísticasDocument14 pagesEcuacionesDiferencialesCaracterísticasKriizthiian HuiisaNo ratings yet
- Trabajotransfromada Inversa de Laplace Fourier y ZDocument14 pagesTrabajotransfromada Inversa de Laplace Fourier y ZKriizthiian HuiisaNo ratings yet
- Parador Con Amplificador Operacional 2012Document8 pagesParador Con Amplificador Operacional 2012Clau SanPerNo ratings yet
- Modelamiento de Una Planta de ControllDocument9 pagesModelamiento de Una Planta de ControllKriizthiian HuiisaNo ratings yet
- 06-07 Practica 1 AnalogicaDocument7 pages06-07 Practica 1 AnalogicaJade AguayoNo ratings yet
- IntroduccionDocument10 pagesIntroduccionJessica OsorioNo ratings yet
- Modelamiento de Una Planta de Control de Nivel Mediante Identificación No Paramétrica Modeling A Level Control Plant by Non-Parametric IdentificationDocument13 pagesModelamiento de Una Planta de Control de Nivel Mediante Identificación No Paramétrica Modeling A Level Control Plant by Non-Parametric IdentificationKriizthiian HuiisaNo ratings yet
- Circuito Derivador CaliDocument12 pagesCircuito Derivador CaliKriizthiian HuiisaNo ratings yet
- Ejemplo RadioenlaceDocument17 pagesEjemplo RadioenlaceKriizthiian HuiisaNo ratings yet
- Modelamiento de Una PlantaDocument13 pagesModelamiento de Una PlantaKriizthiian HuiisaNo ratings yet
- Informe 3 Jfet y MosfetDocument11 pagesInforme 3 Jfet y MosfetKriizthiian HuiisaNo ratings yet
- Modelamiento de Una Planta de Control de Nivel Mediante Identificación No Paramétrica Modeling A Level Control Plant by Non-Parametric IdentificationDocument13 pagesModelamiento de Una Planta de Control de Nivel Mediante Identificación No Paramétrica Modeling A Level Control Plant by Non-Parametric IdentificationKriizthiian HuiisaNo ratings yet
- 8 Transistores de Efecto CampoDocument31 pages8 Transistores de Efecto CampoKriizthiian HuiisaNo ratings yet
- El NiñoDocument115 pagesEl NiñoAnonymous 5SUTrLIKRoNo ratings yet
- Movimiento Rectilíneo Uniforme: Ecuaciones, Gráficas y EjemplosDocument27 pagesMovimiento Rectilíneo Uniforme: Ecuaciones, Gráficas y EjemplosDevi Estefanía Agustín RomeroNo ratings yet
- 06-Integrales Curvilineas PDFDocument21 pages06-Integrales Curvilineas PDFVicky ZacaríasNo ratings yet
- Actividad 4 Modelos de TrnasporteDocument5 pagesActividad 4 Modelos de Trnasportekatherine hernandezNo ratings yet
- Problemas de Matemáticas UniversitariasDocument458 pagesProblemas de Matemáticas UniversitariasNico Mauricio Soto MendozaNo ratings yet
- Capitulo 7 Cartas de Control FinalDocument4 pagesCapitulo 7 Cartas de Control FinalMiguel angel BarlaNo ratings yet
- Consulta 1Document5 pagesConsulta 1Steven PillajoNo ratings yet
- 08diagrama de Dispersion #02Document37 pages08diagrama de Dispersion #02LUIS MIGUEL ROSALES CHUJANDAMANo ratings yet
- Solucionario Guía Función Logarítmica 2016Document12 pagesSolucionario Guía Función Logarítmica 2016PumanqueAburtoNo ratings yet
- Examen Unidad IDocument1 pageExamen Unidad IMichu QuimbitaNo ratings yet
- Distribución T de Student. Características. Cálculo de Probabilidades: Uso de TablasDocument25 pagesDistribución T de Student. Características. Cálculo de Probabilidades: Uso de TablasKarina FernandezNo ratings yet
- Actividad 14Document3 pagesActividad 14Crack 1567100% (1)
- ACTIVIDADES MATEMÁTICAS 1o ESODocument39 pagesACTIVIDADES MATEMÁTICAS 1o ESOpurdina100% (1)
- Cta - MruvDocument2 pagesCta - MruvJuan Delfín Orbegoso GamboaNo ratings yet
- Aplicación 6S y LeanDocument3 pagesAplicación 6S y LeanBelcis Liliana Castillo SalgadoNo ratings yet
- Fortalecer resolución problemas desarrollar pensamiento numérico estudiantes séptimo grado Unidad Educativa Pedro Fermín CevallosDocument2 pagesFortalecer resolución problemas desarrollar pensamiento numérico estudiantes séptimo grado Unidad Educativa Pedro Fermín CevallosJonas DelgadoNo ratings yet
- Tarea I EstadisticaDocument6 pagesTarea I Estadisticafrancisco gilberto cruz cabralesNo ratings yet
- Regla de Cramer para Determinantes 3x3Document7 pagesRegla de Cramer para Determinantes 3x3Desi ArriechiNo ratings yet
- Formulario de DistribucionesDocument18 pagesFormulario de DistribucionesJose Luis TrujilloNo ratings yet
- Trabajo Práctico 3: Modulación FMDocument2 pagesTrabajo Práctico 3: Modulación FMLucho SilvaNo ratings yet
- Construcción de escenarios estratégicosDocument23 pagesConstrucción de escenarios estratégicosAbrilArroyoNo ratings yet
- Guía de Aprendizaje 1grado 1° MatematicasDocument9 pagesGuía de Aprendizaje 1grado 1° Matematicassofia87No ratings yet
- FADEPy ERRHDocument189 pagesFADEPy ERRHEncrismar VegaNo ratings yet
- (II-415) Métodos de IntegraciónDocument21 pages(II-415) Métodos de IntegraciónClaudio PovedaNo ratings yet
- Taller Ley de Coulomb2Document4 pagesTaller Ley de Coulomb2Mauricio Marquez SantosNo ratings yet
- PCE - Apuntes EstadísticaDocument44 pagesPCE - Apuntes EstadísticapaponatorNo ratings yet
- FALACIASDocument11 pagesFALACIASJose AdolfoNo ratings yet
- Reflexión de La LuzDocument14 pagesReflexión de La Luzjuan camilo escobar povedaNo ratings yet
- Calcular el momento de una fuerza respecto a un ejeDocument13 pagesCalcular el momento de una fuerza respecto a un ejeAdolfo AgudeloNo ratings yet
- Copia de LIBRO MUÑOZ COMPLETO (Cap2) PDFDocument237 pagesCopia de LIBRO MUÑOZ COMPLETO (Cap2) PDFJuan Carlos Robles MinayaNo ratings yet