You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- India (History) ChronologyDocument70 pagesIndia (History) ChronologyAngel Zyesha50% (2)
- Telugu Dictionary PDFDocument221 pagesTelugu Dictionary PDFananthoju90% (50)
- Footbridge VibrationDocument11 pagesFootbridge VibrationandreaNo ratings yet
- Technical Development Program: ApplicationsDocument8 pagesTechnical Development Program: ApplicationsSusan Lam100% (1)
- IJERTV2IS70452 - Effect of area and height on lateral forces using SCM and RSMDocument13 pagesIJERTV2IS70452 - Effect of area and height on lateral forces using SCM and RSMPandal Raj100% (1)
- 436-431 MECHANICS 4-Mechanical Vibration-Lecture NotesDocument247 pages436-431 MECHANICS 4-Mechanical Vibration-Lecture Noteskulov1592No ratings yet
- Vibration and Noise in Pumps 1Document12 pagesVibration and Noise in Pumps 1Sultan Laram100% (1)
- Lighting & Acoustic Performance Evaluation and DesignDocument123 pagesLighting & Acoustic Performance Evaluation and DesignTsaiWanChing100% (1)
- Mechanical properties and microstructure of carbon nanotube reinforced aluminum compositesDocument9 pagesMechanical properties and microstructure of carbon nanotube reinforced aluminum compositesKatari KiranNo ratings yet
- Mechatronics: Pınar Boyraz, Mutlu GündüzDocument13 pagesMechatronics: Pınar Boyraz, Mutlu GündüzKatari KiranNo ratings yet
- Isolation MountDocument10 pagesIsolation MountKatari KiranNo ratings yet
- Chapter 1 EtdDocument5 pagesChapter 1 EtdKatari KiranNo ratings yet
- Bagley 1983Document8 pagesBagley 1983Katari KiranNo ratings yet
- Chap3f Secure PDFDocument195 pagesChap3f Secure PDFnadeemkarimiNo ratings yet
- Cg-01ferrit MaterialDocument11 pagesCg-01ferrit MaterialhgulecNo ratings yet
- Academic Calendar Jan - May 2017Document1 pageAcademic Calendar Jan - May 2017Katari KiranNo ratings yet
- Control Systems Course Plan and EvaluationDocument2 pagesControl Systems Course Plan and EvaluationKatari KiranNo ratings yet
- Mathematical Modeling of Magneto-Sensitive ElastomersDocument16 pagesMathematical Modeling of Magneto-Sensitive ElastomersKatari KiranNo ratings yet
- MRE Sandwich Beam Dynamic StabilityDocument13 pagesMRE Sandwich Beam Dynamic StabilityKatari KiranNo ratings yet
- Analysis of Magnetic Field Effect On Ferromagnetic Spheres Embedded in Elastomer PatternDocument18 pagesAnalysis of Magnetic Field Effect On Ferromagnetic Spheres Embedded in Elastomer PatternKatari KiranNo ratings yet
- Optimum Design of A 1: ×2 Mechanical Optical SwitchDocument12 pagesOptimum Design of A 1: ×2 Mechanical Optical SwitchKatari KiranNo ratings yet
- Optimum Design of A 1: ×2 Mechanical Optical SwitchDocument12 pagesOptimum Design of A 1: ×2 Mechanical Optical SwitchKatari KiranNo ratings yet
- DomDocument2 pagesDomHari PraneethNo ratings yet
- Mechanical VibrationDocument13 pagesMechanical VibrationKhalil Raza100% (1)
- Seagate ST251 Product Manual (1987)Document16 pagesSeagate ST251 Product Manual (1987)RobertChobanNo ratings yet
- HAKI Yogyakarta Presentation - Sumitomo (Andri Setiawan)Document27 pagesHAKI Yogyakarta Presentation - Sumitomo (Andri Setiawan)Juliyus FajrinNo ratings yet
- Bicycle Ride ComfortDocument5 pagesBicycle Ride Comforthappy singhNo ratings yet
- Hilbert Vibration DecompositionDocument31 pagesHilbert Vibration DecompositionAndres Guevara0% (1)
- Sae Technical Paper Series 2015-36-0353: Static and Dynamic Analysis of A Chassis of A Prototype CarDocument12 pagesSae Technical Paper Series 2015-36-0353: Static and Dynamic Analysis of A Chassis of A Prototype CarGanesh KCNo ratings yet
- I and II Semester Syllabus-UVCE 2021Document51 pagesI and II Semester Syllabus-UVCE 2021rangooNo ratings yet
- Vibration Engineering Fundamentals ExplainedDocument11 pagesVibration Engineering Fundamentals ExplainedLourdes Marie Rosalejos OrtegaNo ratings yet
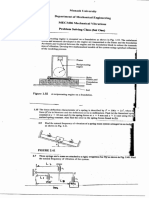
- MEC3406 Mechanical Vibrations Problem Solving Class Set OneDocument1 pageMEC3406 Mechanical Vibrations Problem Solving Class Set Onemohsin ahmedNo ratings yet
- Dynamics of High-Speed Railway BridgesDocument24 pagesDynamics of High-Speed Railway Bridgesewa1988No ratings yet
- Tva - Pt. SteadfastDocument25 pagesTva - Pt. SteadfastarieznavalNo ratings yet
- Dynamics of MachineryDocument2 pagesDynamics of MachineryBhavesh PipaliyaNo ratings yet
- ISTA Procedure 1B 01-07Document8 pagesISTA Procedure 1B 01-07Brian AdamsNo ratings yet
- Flow-induced vibration risks to piping systemsDocument6 pagesFlow-induced vibration risks to piping systemsLijukrishnanNo ratings yet
- The Vibration of Rectangular PlatesDocument14 pagesThe Vibration of Rectangular PlatesMauricio Yasmany Fernández ZeballosNo ratings yet
- Sample Design Calculations For Block Found. For Vib. Equip.Document17 pagesSample Design Calculations For Block Found. For Vib. Equip.Adam Michael GreenNo ratings yet
- A Mathematical Model of Vibration Signal For Multistage Wind Turbine Gearboxes With Transmission Path Effect AnalysisDocument17 pagesA Mathematical Model of Vibration Signal For Multistage Wind Turbine Gearboxes With Transmission Path Effect Analysisrahul reddy100% (1)
- Jntuk M Tech r16 Cad Cam SyllabusDocument29 pagesJntuk M Tech r16 Cad Cam Syllabusvenkata100% (1)
- HND Plant ReaccreditationDocument84 pagesHND Plant ReaccreditationAdamsNo ratings yet
- T3-5 Suspension System PDFDocument20 pagesT3-5 Suspension System PDFGunjan TrivediNo ratings yet
- SIRIGIRI Asu 0010N 13794Document93 pagesSIRIGIRI Asu 0010N 13794Kha PhucNo ratings yet
- Along Wind Analysis of Reinforced Concrete ChimneysDocument7 pagesAlong Wind Analysis of Reinforced Concrete ChimneysreenaNo ratings yet