You might also like
- Electronics Circuit Designer's Casebook 1Document172 pagesElectronics Circuit Designer's Casebook 1Viktor Mathias Bucher100% (1)
- Metal-Enclosed Switchgear: HMS Medium Voltage Air-InsulatedDocument36 pagesMetal-Enclosed Switchgear: HMS Medium Voltage Air-InsulatedWinaYulistiawatiNo ratings yet
- 33KV Abb C&R-63675-2015Document79 pages33KV Abb C&R-63675-2015RK KNo ratings yet
- DSP Final Bilal Electroncs23Document1 pageDSP Final Bilal Electroncs23Mian Fahim100% (1)
- RF & Microwave Design Guide - Sierra Circuits - November 2021Document44 pagesRF & Microwave Design Guide - Sierra Circuits - November 2021Milan Đorđevic100% (1)
- Apqp Time PlanDocument3 pagesApqp Time PlanAnonymous CGm3k30% (1)
- BJT Small Signal Configurations Cheat SheetDocument1 pageBJT Small Signal Configurations Cheat SheetAdi SaggarNo ratings yet
- Design and Development of A Fluxgate MagnetometerDocument5 pagesDesign and Development of A Fluxgate Magnetometerdr_oxide2No ratings yet
- A Simple Usb Oscilloscope For The PCDocument15 pagesA Simple Usb Oscilloscope For The PCJuan Gil Roca100% (1)
- Multiple Choice Questions in Electronics and Electrical EngineeringFrom EverandMultiple Choice Questions in Electronics and Electrical EngineeringRating: 4 out of 5 stars4/5 (1)
- Low Frequency Characteristic Analysis of Voltage Mode Boost ConverterDocument4 pagesLow Frequency Characteristic Analysis of Voltage Mode Boost Converterkakkunuru kashyapNo ratings yet
- PWM REF REV BRK + I + - +ref - Ref PWM REF: PSS Current Controlled PWM VoltageDocument1 pagePWM REF REV BRK + I + - +ref - Ref PWM REF: PSS Current Controlled PWM VoltageSureshNo ratings yet
- Blue Colour Cells Are Automatic Value Generated Not EditableDocument18 pagesBlue Colour Cells Are Automatic Value Generated Not EditableAbdussalamElhanashiNo ratings yet
- Guidelines For Selection of Neutral Reactors Rating For Shunt Compensated EHV Transmission LinesDocument6 pagesGuidelines For Selection of Neutral Reactors Rating For Shunt Compensated EHV Transmission Linessonu200186No ratings yet
- 1912593-Guidelines For Selection of NGR Paper-2Document6 pages1912593-Guidelines For Selection of NGR Paper-2mohammed nayeemNo ratings yet
- GSM Base Station Role in Originating Call ContextDocument1 pageGSM Base Station Role in Originating Call ContextLeuLeuNo ratings yet
- Princeton Fire MapDocument1 pagePrinceton Fire MapCarmen WeldNo ratings yet
- Analog System Design: Sarun Soman Asst: Professor EEE DepartmentDocument48 pagesAnalog System Design: Sarun Soman Asst: Professor EEE DepartmentSarun SomanNo ratings yet
- SYN DC CircuitsDocument25 pagesSYN DC CircuitsHaider NisarNo ratings yet
- School of Computing Fall 2020 Course ListDocument5 pagesSchool of Computing Fall 2020 Course ListSyed Muhammad Ali MustafaNo ratings yet
- INSERTS 5band EQ PQDocument1 pageINSERTS 5band EQ PQapi-12922547No ratings yet
- Operation Manual - A Table of ContentsDocument506 pagesOperation Manual - A Table of ContentsErvin PregNo ratings yet
- 01 Catalogue Cable Entries PDFDocument58 pages01 Catalogue Cable Entries PDFFlorin RazvanNo ratings yet
- Planos Piscicola Rosario PresenDocument1 pagePlanos Piscicola Rosario PresenGabriel Romero MamaniNo ratings yet
- Features: Switching RegulatorDocument7 pagesFeatures: Switching RegulatorCesar GastaldiNo ratings yet
- 1868 en EDocument16 pages1868 en EMohamed100% (1)
- Water measurement: Introducing the JS Master C+ water meterDocument6 pagesWater measurement: Introducing the JS Master C+ water meterdaskirNo ratings yet
- OPamp Based Circuit DesignDocument48 pagesOPamp Based Circuit DesignSarun SomanNo ratings yet
- TN17-1003 Pruebas de NucleoDocument6 pagesTN17-1003 Pruebas de NucleoAlonsoNo ratings yet
- X Physics Formula Sheet ReducedDocument3 pagesX Physics Formula Sheet ReducedGAMEFLOW PLAYSNo ratings yet
- Take-Off: Certifica TionDocument18 pagesTake-Off: Certifica TionTj RivasNo ratings yet
- IEC schematic diagrams descriptionDocument8 pagesIEC schematic diagrams descriptiongrigNo ratings yet
- Emi Exp 1-3Document22 pagesEmi Exp 1-3Virag ParekhNo ratings yet
- XPR End User Experience...Document5 pagesXPR End User Experience...Zerrouki MohamedNo ratings yet
- Rac03 K PDFDocument6 pagesRac03 K PDFSimon AmplemanNo ratings yet
- Features: Switching RegulatorDocument4 pagesFeatures: Switching RegulatorJavier Alejandro Sevilla LinaresNo ratings yet
- Worksheet Intangibleassetsandgoodwill SubstantiveanalyticalproceduresDocument2 pagesWorksheet Intangibleassetsandgoodwill Substantiveanalyticalproceduressinra kongNo ratings yet
- HS2 design案例Document201 pagesHS2 design案例zhaotian zhangNo ratings yet
- h1321512347 Mx009e-1Document1 pageh1321512347 Mx009e-1Refaat RaslanNo ratings yet
- SCRs Make Servi-WPS OfficeDocument1 pageSCRs Make Servi-WPS OfficeRenalyn AblingNo ratings yet
- Hydropower Development Design LectureDocument46 pagesHydropower Development Design LectureRabinNo ratings yet
- INSERTS 5band EQDocument1 pageINSERTS 5band EQapi-12922547100% (2)
- TV and CRT Display Vertical Output IC With Bus Control SupportDocument4 pagesTV and CRT Display Vertical Output IC With Bus Control SupportLuis RinconNo ratings yet
- Street Light Feeder Pillar SpecificationDocument4 pagesStreet Light Feeder Pillar Specificationa_muhaiminNo ratings yet
- 7 Ims - Registration - Collaboration - Ue PDFDocument1 page7 Ims - Registration - Collaboration - Ue PDFJose Del Risco XiquesNo ratings yet
- Delta Ia-Asd A2 C FR 20090815Document20 pagesDelta Ia-Asd A2 C FR 20090815MOUHSSINE BEN HAMMOUNo ratings yet
- Other Book Reading ERPDocument12 pagesOther Book Reading ERPSha EemNo ratings yet
- DABRSwithreactivePower PDFDocument6 pagesDABRSwithreactivePower PDFAyral FernandezNo ratings yet
- Power Conversion Control Ebook PDFDocument6 pagesPower Conversion Control Ebook PDFAnkit PrajapatiNo ratings yet
- AMEF - Bomba Ensival de Efluentes de PWADocument1 pageAMEF - Bomba Ensival de Efluentes de PWATom WilberNo ratings yet
- Datasheet RAC05-K - 480Document7 pagesDatasheet RAC05-K - 480Ulises Perez MontielNo ratings yet
- DraftPlan 1Document1 pageDraftPlan 1CMMichaelABrownNo ratings yet
- 2016.12 US QuestionsDocument61 pages2016.12 US QuestionsmuhammedNo ratings yet
- 8amp SMART Power Supply: Data SheetDocument2 pages8amp SMART Power Supply: Data SheetPrabhakaran SureshNo ratings yet
- Projectcostbenefitworkbook - On Add. Guidance and Templates 0Document1 pageProjectcostbenefitworkbook - On Add. Guidance and Templates 0Hervé KoyaNo ratings yet
- Float Level TransmitterDocument4 pagesFloat Level TransmitterTharaka MethsaraNo ratings yet
- 30mW max. no load power consumption AC/DC converter with 3kVAC isolation and 3 year warrantyDocument5 pages30mW max. no load power consumption AC/DC converter with 3kVAC isolation and 3 year warrantyCoreyNo ratings yet
- LPDT Manual Dew Point PDFDocument54 pagesLPDT Manual Dew Point PDFambeshNo ratings yet
- RCD-R Damping DesignDocument5 pagesRCD-R Damping DesignPham Viet QuanNo ratings yet
- Fire HoseDocument12 pagesFire HoseMyat Kyaw HeinNo ratings yet
- 3 Cpu3Document4 pages3 Cpu3Wanie ZulkifliNo ratings yet
- 2 - Introduction To The ME Engine (July 2009)Document13 pages2 - Introduction To The ME Engine (July 2009)Олег ГутникNo ratings yet
- Performance Plan for Regional Wrestling CompetitionDocument2 pagesPerformance Plan for Regional Wrestling CompetitionLydia PermatasariNo ratings yet
- Aeropuerto Hamburgo PDFDocument1 pageAeropuerto Hamburgo PDFVictor IglesiasNo ratings yet
- Gigabit Ethernet Design Guide: Author: Kiet Tran Microchip Technology IncDocument13 pagesGigabit Ethernet Design Guide: Author: Kiet Tran Microchip Technology IncLarbi BelazizNo ratings yet
- Input Bias Current Cancelation Resistors-Uticaj Bias CurrentDocument3 pagesInput Bias Current Cancelation Resistors-Uticaj Bias CurrentMilan ĐorđevicNo ratings yet
- Human Longevity Re 00 EastDocument400 pagesHuman Longevity Re 00 EastMilan ĐorđevicNo ratings yet
- 1ACOS - S Ima Da Se Nadju 1wDocument4 pages1ACOS - S Ima Da Se Nadju 1wMilan ĐorđevicNo ratings yet
- Inverting vs. Noninverting - VAZNODocument12 pagesInverting vs. Noninverting - VAZNOMilan ĐorđevicNo ratings yet
- PCB Layout For The Ethernet PHY Interface: Chassis Ground System GroundDocument6 pagesPCB Layout For The Ethernet PHY Interface: Chassis Ground System GroundJay PinedaNo ratings yet
- Ad8428 Low NoiseDocument20 pagesAd8428 Low NoiseMilan ĐorđevicNo ratings yet
- dn015f NOISEDocument2 pagesdn015f NOISEMilan ĐorđevicNo ratings yet
- AC/DC Converter: FeaturesDocument4 pagesAC/DC Converter: FeaturesMilan ĐorđevicNo ratings yet
- ETH EkstraDocument42 pagesETH EkstraMilan ĐorđevicNo ratings yet
- Controll BoardV1.0Document3 pagesControll BoardV1.0Milan ĐorđevicNo ratings yet
- Status ReportDocument1 pageStatus ReportMilan ĐorđevicNo ratings yet
- 3-Wire RTD Measurement System Reference Design, - 200°C To 850°CDocument39 pages3-Wire RTD Measurement System Reference Design, - 200°C To 850°CMilan ĐorđevicNo ratings yet
- Temperature Transmitter On Single Chip Mixed-Signal MCU: TI DesignsDocument31 pagesTemperature Transmitter On Single Chip Mixed-Signal MCU: TI DesignsMilan ĐorđevicNo ratings yet
- Precision Thermocouple Measurement With The ADS1118: TI Precision Designs: Verified DesignDocument26 pagesPrecision Thermocouple Measurement With The ADS1118: TI Precision Designs: Verified DesignMilan ĐorđevicNo ratings yet
- Data Isolation For Loop-Powered Applications: TI DesignsDocument33 pagesData Isolation For Loop-Powered Applications: TI DesignsMilan ĐorđevicNo ratings yet
- Searaq I/O Modules: User ManualDocument59 pagesSearaq I/O Modules: User ManualMilan ĐorđevicNo ratings yet
- 4-20ma Current Transmitter With RTD EXCITATION andDocument11 pages4-20ma Current Transmitter With RTD EXCITATION andatl6519100% (1)
- How To Export Gerber Files From Altium Designer 2009Document18 pagesHow To Export Gerber Files From Altium Designer 2009szoloNo ratings yet
- Voltage Output Programmable Sensor Conditioner: Features DescriptionDocument25 pagesVoltage Output Programmable Sensor Conditioner: Features DescriptionMilan ĐorđevicNo ratings yet
- CN0376Document7 pagesCN0376Milan ĐorđevicNo ratings yet
- XC6204/XC6205: General DescriptionDocument51 pagesXC6204/XC6205: General DescriptionMilan ĐorđevicNo ratings yet
- Design of a 2.5kW isolated DC/DC fullbridge converter for electric vehicle applicationDocument55 pagesDesign of a 2.5kW isolated DC/DC fullbridge converter for electric vehicle applicationmarconi-agNo ratings yet
- PSSI2021SAY: 1. Product ProfileDocument12 pagesPSSI2021SAY: 1. Product ProfileMilan ĐorđevicNo ratings yet
- Civil Services - Electrical Main Paper I & II - 1992-2012 - 7.6MBDocument253 pagesCivil Services - Electrical Main Paper I & II - 1992-2012 - 7.6MBAnika DixitNo ratings yet
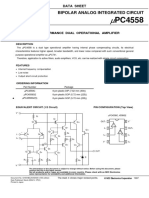
- Upc 4558Document11 pagesUpc 4558alex chapuzNo ratings yet
- OP-AMP Experiments: Inverting, Non-Inverting and Voltage Follower CircuitsDocument4 pagesOP-AMP Experiments: Inverting, Non-Inverting and Voltage Follower CircuitsnirmalaNo ratings yet
- Dynamic Braking Resistor Chopper CircuitDocument5 pagesDynamic Braking Resistor Chopper CircuitAri SutejoNo ratings yet
- Karaoke/Surround Digital Echo: BU9253AS/FS, BU9262AFSDocument17 pagesKaraoke/Surround Digital Echo: BU9253AS/FS, BU9262AFSRodrigo Augusto SantosNo ratings yet
- A 1.2 v 285μA Analog Front End Chip for a Digital Hearing Aid in 0.13 Μm CMOSDocument4 pagesA 1.2 v 285μA Analog Front End Chip for a Digital Hearing Aid in 0.13 Μm CMOSWu JenshiNo ratings yet
- LM 4890 NMP4341221 NCP2890 9 Pins For Nokia 2300 3100 3300 3510 3510i 3650 3660 5100 6100 6310 6310i 6600 N-Gage Pantech GF100Document32 pagesLM 4890 NMP4341221 NCP2890 9 Pins For Nokia 2300 3100 3300 3510 3510i 3650 3660 5100 6100 6310 6310i 6600 N-Gage Pantech GF100Andreea TutiroNo ratings yet
- Bicmos Two-Stage Operational AmpliþerDocument8 pagesBicmos Two-Stage Operational AmpliþerquiquemixNo ratings yet
- Soal UASDocument7 pagesSoal UASYusuf Luqman HakimNo ratings yet
- Euvl Cen - Sen I:vDocument12 pagesEuvl Cen - Sen I:vMario RossiNo ratings yet
- Electromagnetic Pendulum Drive CircuitDocument3 pagesElectromagnetic Pendulum Drive CircuitDragana Tasic Otasevic0% (1)
- Circuits and Systems Lab and Scientific Computing Lab OverviewDocument4 pagesCircuits and Systems Lab and Scientific Computing Lab Overviewprdpks2000No ratings yet
- Detecting Cell Phones Within 1-2 MetersDocument9 pagesDetecting Cell Phones Within 1-2 MetersGabriel Aguek AguekNo ratings yet
- Lic Unit 2 Digital NotesDocument157 pagesLic Unit 2 Digital NoteslyrixxopediaNo ratings yet
- Introduction To Comparator CircuitDocument57 pagesIntroduction To Comparator CircuitNasa McAikenNo ratings yet
- Infineon EPS User ManualDocument42 pagesInfineon EPS User Manualacmilan4eva1899No ratings yet
- Lab1 Op AmpsDocument4 pagesLab1 Op AmpsShar Mae GayangosNo ratings yet
- Aimspice RefDocument149 pagesAimspice RefShre ChatterjeeNo ratings yet
- Operational Amplifier: From Wikipedia, The Free EncyclopediaDocument18 pagesOperational Amplifier: From Wikipedia, The Free EncyclopedianuskhanNo ratings yet
- Unit2 MSDocument43 pagesUnit2 MSchandramohan murugan100% (1)
- CSS 7 - 8-Q4-Module 12Document26 pagesCSS 7 - 8-Q4-Module 12Joanne Jose CastroNo ratings yet
- Roland Sp404Document25 pagesRoland Sp404Gyula MolnarNo ratings yet
- Catalogue 2013 PDFDocument206 pagesCatalogue 2013 PDFAmmar AjmalNo ratings yet
- Experimenting: With Circular SweepDocument6 pagesExperimenting: With Circular SweepAlberto NovelloNo ratings yet
- AskDocument6 pagesAskJesus Ernesto Baizabal GushikenNo ratings yet
- FM Radio Receiver Using TDA7088Document21 pagesFM Radio Receiver Using TDA7088polisolventeNo ratings yet
- ECE 316 Guide to Electronic Component Color CodesDocument84 pagesECE 316 Guide to Electronic Component Color CodesPakistan augustNo ratings yet