You might also like
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionFrom EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo ratings yet
- Designing of Cranes With StandardsDocument95 pagesDesigning of Cranes With Standardsank_mehraNo ratings yet
- Design and Analysis of Crane Hook With Different MaterialsDocument6 pagesDesign and Analysis of Crane Hook With Different MaterialsEditor IJTSRDNo ratings yet
- CMAA 70 2000 Structure DesignDocument19 pagesCMAA 70 2000 Structure DesignmishikhanNo ratings yet
- ARRIUM - Standards For Crane Anti-Derailment Final R4Document18 pagesARRIUM - Standards For Crane Anti-Derailment Final R4YOO SHIN0% (1)
- Wall Mounted H-Type Jib Crane DesignDocument65 pagesWall Mounted H-Type Jib Crane DesignFitra VertikalNo ratings yet
- Swapnil (2016) - Design of Components Used in Hoisting Mechanism of An EOTDocument5 pagesSwapnil (2016) - Design of Components Used in Hoisting Mechanism of An EOTGogyNo ratings yet
- Crane Rail Selection: Calculation of Required Rail Head WidthDocument1 pageCrane Rail Selection: Calculation of Required Rail Head WidthMAHMOUD YOUNISNo ratings yet
- Buckling Loads of Columns With Gradually Changing Cross-Section Subjected To Combined Axial LoadingDocument12 pagesBuckling Loads of Columns With Gradually Changing Cross-Section Subjected To Combined Axial LoadingDoutor InácioNo ratings yet
- KBK Classic and KBK Ergo Crane Construction Kits GuideDocument12 pagesKBK Classic and KBK Ergo Crane Construction Kits GuideMahendran KuppusamyNo ratings yet
- 059 062 PDFDocument4 pages059 062 PDFMario MereniNo ratings yet
- U 336380Document332 pagesU 336380Nguyễn Văn ĐiệpNo ratings yet
- 40 Ton Crane Tender DocumentDocument12 pages40 Ton Crane Tender DocumentJaay VelNo ratings yet
- STRESS ANALYSIS and FATIGUE of Welded StructuresDocument20 pagesSTRESS ANALYSIS and FATIGUE of Welded Structuresmatteo_1234100% (1)
- 320B All PDFDocument43 pages320B All PDFahmed_merzban9153No ratings yet
- Everything You Need to Know About Tower CranesDocument26 pagesEverything You Need to Know About Tower CranesAr Dheeraj MauryaNo ratings yet
- Emm 3506 - Group 3Document132 pagesEmm 3506 - Group 3Griffin ThomasNo ratings yet
- TurnbucklesDocument2 pagesTurnbuckleschondroc11No ratings yet
- Rigging FittingsDocument52 pagesRigging FittingsbhaskarjalanNo ratings yet
- Monorails 4ed Bk180Document12 pagesMonorails 4ed Bk180harishram123456No ratings yet
- Calculating The Service Life of Running Steel Wire RopesDocument33 pagesCalculating The Service Life of Running Steel Wire RopesAbdellah El Barkany100% (1)
- Crash TestingDocument60 pagesCrash TestingMeldi SuhatrilNo ratings yet
- Sherman - Extended Shear TabsDocument148 pagesSherman - Extended Shear TabsRohan KarandeNo ratings yet
- Iso 12482 2014Document11 pagesIso 12482 2014Ken RanggaNo ratings yet
- DesignDocument4 pagesDesignJigneshkumar PatelNo ratings yet
- Limit States Design of Crane Runway GirdersDocument7 pagesLimit States Design of Crane Runway GirdersRatna YanuarNo ratings yet
- SFD Csa S16 09 PDFDocument116 pagesSFD Csa S16 09 PDFMohamed Abo-ZaidNo ratings yet
- KranDocument7 pagesKranMarioNo ratings yet
- TGN 11 Clip Spacing 09-12Document2 pagesTGN 11 Clip Spacing 09-12kayakeras3335No ratings yet
- Accountingeconomics Final John Joseph CrumpDocument15 pagesAccountingeconomics Final John Joseph CrumpDoreenNo ratings yet
- Eccentric Column BucklingDocument10 pagesEccentric Column BucklingMukeshChopraNo ratings yet
- JDN Monocrane - Manufacturers of Overhead Lifting EquipmentDocument19 pagesJDN Monocrane - Manufacturers of Overhead Lifting EquipmentJDN MonocraneNo ratings yet
- HSS CatalogueDocument56 pagesHSS CataloguenenmilNo ratings yet
- Experimental stress analysis improves gondola wagon designDocument2 pagesExperimental stress analysis improves gondola wagon designrentizahariaNo ratings yet
- Design and Structural Dynamic Analysis of Overhead Elliptical ConveyorDocument18 pagesDesign and Structural Dynamic Analysis of Overhead Elliptical ConveyorIJSTENo ratings yet
- Box Type Annealing Furnace QuotationDocument5 pagesBox Type Annealing Furnace QuotationdantecbNo ratings yet
- Emergency Braking System for EOT CranesDocument7 pagesEmergency Braking System for EOT CranesHarish Gupta (JSHL)No ratings yet
- POS CAL TP No10 Vb2 C200x80x7 - 5 CVR Bolt R0 20180731Document26 pagesPOS CAL TP No10 Vb2 C200x80x7 - 5 CVR Bolt R0 20180731Nguyễn Duy QuangNo ratings yet
- FEA and Optimization of Telescopic Boom of Mobiles Hydraulic CraneDocument6 pagesFEA and Optimization of Telescopic Boom of Mobiles Hydraulic Cranenpd1986100% (2)
- TEL Derrick Brochure - WebsiteDocument8 pagesTEL Derrick Brochure - WebsitePete ANo ratings yet
- Crane LiftDocument13 pagesCrane Liftburak_saadet1250No ratings yet
- Design Consideration For TraversersDocument17 pagesDesign Consideration For TraversersAmin PaniwalaNo ratings yet
- AISC Design Guide Revisions and ErrataDocument6 pagesAISC Design Guide Revisions and ErrataFernando Gutiérrez UrzúaNo ratings yet
- FEA and Optimization of Telescopic Boom of Mobiles Hydraulic CraneDocument6 pagesFEA and Optimization of Telescopic Boom of Mobiles Hydraulic CraneAzmi Bin A MataliNo ratings yet
- 2013 Wright Specifications CatalogDocument189 pages2013 Wright Specifications CatalogcenicercNo ratings yet
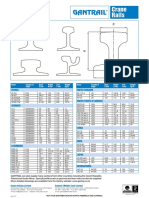
- Crane RailsDocument1 pageCrane RailsZain UddinNo ratings yet
- Overhead Crane DesignDocument50 pagesOverhead Crane DesignjuanNo ratings yet
- AsrsDocument58 pagesAsrsaman_88_vermaNo ratings yet
- C HookDocument11 pagesC HookPradip SitaparaNo ratings yet
- Below The Hook Lifting HanesDocument26 pagesBelow The Hook Lifting HanesmaomontesNo ratings yet
- DWP Calculation 1601139173Document18 pagesDWP Calculation 1601139173Ashutosh KumarNo ratings yet
- Brugg Catalog enDocument28 pagesBrugg Catalog enSinoj V AntonyNo ratings yet
- Wheel Calculation IDEA Analyzes Wheel Material OptionsDocument35 pagesWheel Calculation IDEA Analyzes Wheel Material Optionsbambang satryojatiNo ratings yet
- Sundriyal (2015) - Stress Analysis of Crane Hook With Different Cross Sections Using ANSYSDocument6 pagesSundriyal (2015) - Stress Analysis of Crane Hook With Different Cross Sections Using ANSYSGogyNo ratings yet
- Custom LiftersDocument17 pagesCustom LiftersyogihardNo ratings yet
- Wire Ropes Drive Mechanism For Reciprocating Linear MotionDocument5 pagesWire Ropes Drive Mechanism For Reciprocating Linear MotionSachin KumawatNo ratings yet
- Spring washer dimensions and specificationsDocument2 pagesSpring washer dimensions and specificationsboyzes100% (1)
- Design_of_Plate_GirdersDocument109 pagesDesign_of_Plate_GirdersboyzesNo ratings yet
- outokumpu-steel-grades-properties-global-standardsDocument20 pagesoutokumpu-steel-grades-properties-global-standardsboyzesNo ratings yet
- Tech update on dewatering pump selectionDocument2 pagesTech update on dewatering pump selectionboyzesNo ratings yet
- User Manual Cuplok (10-2006)Document51 pagesUser Manual Cuplok (10-2006)humaidjafri60% (5)
- Scaffolding PDFDocument80 pagesScaffolding PDFLeo Richmond75% (4)
- Interpretation of Pile Integrity Test (PIT) Results by H.S. Thilakasiri 2006Document7 pagesInterpretation of Pile Integrity Test (PIT) Results by H.S. Thilakasiri 2006Ashokan Keloth100% (1)
- Sikalastic-1 KMYDocument3 pagesSikalastic-1 KMYboyzesNo ratings yet
- Hilti Malaysia Product Catalogue Chapter 8 - Diamond CoringDocument10 pagesHilti Malaysia Product Catalogue Chapter 8 - Diamond CoringboyzesNo ratings yet
- Steelwise - 1 - Anchor Road Too Short ArticleDocument3 pagesSteelwise - 1 - Anchor Road Too Short ArticleboyzesNo ratings yet
- Dewatering and Groundwater ControlDocument158 pagesDewatering and Groundwater ControljdhbulseyeNo ratings yet
- Addressing Anchors (Steelwise Article On Anchor Bolt Fixes)Document3 pagesAddressing Anchors (Steelwise Article On Anchor Bolt Fixes)Justin UyarNo ratings yet
- CONSTRUCTION DEWATERING TECHNIQUESDocument4 pagesCONSTRUCTION DEWATERING TECHNIQUESAnonymous QSTAL5JpNo ratings yet
- MSMA2ndEdition August 2012Document807 pagesMSMA2ndEdition August 2012Haffiz Welez100% (1)
- Product Brochure Kerberos TPBDocument12 pagesProduct Brochure Kerberos TPBchandan211No ratings yet
- Asme Section II A Sa 307 PDFDocument8 pagesAsme Section II A Sa 307 PDFboyzesNo ratings yet
- Hilti - Example Calculation - 2014-09Document3 pagesHilti - Example Calculation - 2014-09boyzesNo ratings yet
- EOTA TR29 Design of Bonded AnchorsDocument36 pagesEOTA TR29 Design of Bonded Anchorsl282No ratings yet
- Rigid Pavement Dowel Bar Mechanics and DesignDocument22 pagesRigid Pavement Dowel Bar Mechanics and DesignboyzesNo ratings yet
- ACI-330 Design Guide For Concrete Parking Lots PDFDocument32 pagesACI-330 Design Guide For Concrete Parking Lots PDFprmrao100% (1)
- 16-Concrete Pavements (Part 2) - Jointing in PCC ConstructionDocument89 pages16-Concrete Pavements (Part 2) - Jointing in PCC ConstructionHimanshu SainiNo ratings yet
- Application of Second-Order Elastic Analysis in LRDocument17 pagesApplication of Second-Order Elastic Analysis in LRboyzesNo ratings yet
- Dowel BarsDocument70 pagesDowel Barsesprindia100% (1)
- 16-Concrete Pavements (Part 2) - Jointing in PCC ConstructionDocument89 pages16-Concrete Pavements (Part 2) - Jointing in PCC ConstructionHimanshu SainiNo ratings yet
- Selection of Equivalent Steel Materials To European Steel Materials SpecificationsDocument154 pagesSelection of Equivalent Steel Materials To European Steel Materials SpecificationsJean-Noël LerouxNo ratings yet
- Strength Design of Anchorage To Concrete PDFDocument86 pagesStrength Design of Anchorage To Concrete PDFAl_catraz100% (2)
- Eot Crane During SeismicDocument12 pagesEot Crane During SeismicboyzesNo ratings yet
- Dynamics of a mathematical pendulum suspended from a moving massDocument6 pagesDynamics of a mathematical pendulum suspended from a moving massEduardo Caldas da RochaNo ratings yet
- Hilti - Hvu Has (-E) - 2014-09Document10 pagesHilti - Hvu Has (-E) - 2014-09boyzesNo ratings yet
- ETAG 001-Annex C 10-08-01Document34 pagesETAG 001-Annex C 10-08-01jpjobduNo ratings yet
- 641 D PDFDocument1 page641 D PDFJuan Pablo Merck SifontesNo ratings yet
- Cat 329d L Manual 217571Document20 pagesCat 329d L Manual 217571Emilio Serrano Ruiz100% (1)
- Deep Foundations: Pile Types and Axial CapacityDocument58 pagesDeep Foundations: Pile Types and Axial CapacitysunilarunaNo ratings yet
- Measurement and Prediction of Residual Stresses in Thick-Section Steel WeldsDocument21 pagesMeasurement and Prediction of Residual Stresses in Thick-Section Steel WeldsCenascenascenascenasNo ratings yet
- Analysis of Concrete Beams Prestressed and Posttensioned With Externally Unbonded Carbon Fiber Reinforced Polymer TendonsDocument14 pagesAnalysis of Concrete Beams Prestressed and Posttensioned With Externally Unbonded Carbon Fiber Reinforced Polymer TendonsTan Duy LeNo ratings yet
- Contoh Soal Masuk Univ LuarDocument15 pagesContoh Soal Masuk Univ LuarHelen GiovaniNo ratings yet
- Seakeeping Methods Lecture - Alto UniversityDocument35 pagesSeakeeping Methods Lecture - Alto UniversityajayNo ratings yet
- 8th (0) Physics 9 Weeks DivisionDocument3 pages8th (0) Physics 9 Weeks Divisionusama nisarNo ratings yet
- My First Class - AssignmentDocument3 pagesMy First Class - AssignmentSreeram Reddy GundetiNo ratings yet
- Chapter 01 Design ProcessDocument6 pagesChapter 01 Design ProcessAsifAli159No ratings yet
- Unit 1: Introduction To Kinesiology and Sports BiomechanicsDocument70 pagesUnit 1: Introduction To Kinesiology and Sports BiomechanicsGOLDEN FIZZIK GYM100% (1)
- Attributes of Technical WritingDocument9 pagesAttributes of Technical WritingJames Mason0% (1)
- ASTM E646 Tensile Strain-Hardening PDFDocument8 pagesASTM E646 Tensile Strain-Hardening PDFhdierkeNo ratings yet
- Discrete Structures Amin WitnoDocument25 pagesDiscrete Structures Amin WitnoJonard CalimlimNo ratings yet
- Cigré 640 - A Guide For Rating Calculations of Insulated Cables PDFDocument273 pagesCigré 640 - A Guide For Rating Calculations of Insulated Cables PDFCristian Martinez100% (1)
- Cosmtics PigmentsDocument31 pagesCosmtics PigmentsLaura Daniela Silva AriasNo ratings yet
- Dual Band Antenna SpecsDocument2 pagesDual Band Antenna SpecsAnonymous cDWQYsjd9No ratings yet
- Manual Web TL1040Document4 pagesManual Web TL1040Ivan German SantillanNo ratings yet
- Fitting new lifetime model by mixing gamma and geometric distributionsDocument14 pagesFitting new lifetime model by mixing gamma and geometric distributionssssNo ratings yet
- Solving Nonlinear Equations With Newton's MethodDocument119 pagesSolving Nonlinear Equations With Newton's MethodTMaxtor100% (2)
- Physics Reviewer ChuchuDocument8 pagesPhysics Reviewer ChuchuNathaniel Caezar Paulo Pastoriza100% (1)
- Heat Transfer Nmu UniversityDocument4 pagesHeat Transfer Nmu UniversityKetan V. JoshiNo ratings yet
- Nas 107Document498 pagesNas 107lw_ponchNo ratings yet
- TPDEDocument2 pagesTPDEmurugan2284No ratings yet
- Reliability SlideDocument26 pagesReliability SlideBENZINNo ratings yet
- 08 EPG Climate ControlDocument58 pages08 EPG Climate ControlRobNo ratings yet
- Oday Is Uesday Eptember TH,: AdjectivesDocument43 pagesOday Is Uesday Eptember TH,: AdjectivesDiana G RamirezNo ratings yet
- NR-220402-Electrical TechnologyDocument8 pagesNR-220402-Electrical TechnologytemesgenNo ratings yet
- CHEM 14 Problem Set 3, Ma'am Fatsy CruzDocument2 pagesCHEM 14 Problem Set 3, Ma'am Fatsy CruzDoroteo Jose StationNo ratings yet
- Dual Shield II 110 Flux-Cored WireDocument2 pagesDual Shield II 110 Flux-Cored WireRodrigoNo ratings yet