You might also like
- ACS 355 frequency inverter quick setup guideDocument3 pagesACS 355 frequency inverter quick setup guideBoulos NassarNo ratings yet
- AOD Brochure PersulfateDocument16 pagesAOD Brochure PersulfateÖzgür SelviNo ratings yet
- Main Vehicle SpecificationsDocument3 pagesMain Vehicle SpecificationsBoulos NassarNo ratings yet
- Effects of Parameters On Nrel Solar Position Algorithm (Spa) and Simatic S7-1200 Spa - Calc - Sunvector Library AccuracyDocument18 pagesEffects of Parameters On Nrel Solar Position Algorithm (Spa) and Simatic S7-1200 Spa - Calc - Sunvector Library AccuracyBoulos NassarNo ratings yet
- Efficiency Package For Solar TrackerDocument2 pagesEfficiency Package For Solar TrackerBoulos NassarNo ratings yet
- Lead Acid Battery Desulfator GuideDocument5 pagesLead Acid Battery Desulfator GuidetopazeusNo ratings yet
- ACS 355 frequency inverter quick setup guideDocument3 pagesACS 355 frequency inverter quick setup guideBoulos NassarNo ratings yet
- Battery Desulphator: John Drake Services, IncDocument3 pagesBattery Desulphator: John Drake Services, IncBoulos NassarNo ratings yet
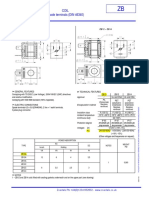
- Spade Terminals (DIN 46340) : ZB10 ZB12 - ZB14Document1 pageSpade Terminals (DIN 46340) : ZB10 ZB12 - ZB14Boulos NassarNo ratings yet
- Battery Desulphator: John Drake Services, IncDocument3 pagesBattery Desulphator: John Drake Services, IncBoulos NassarNo ratings yet
- Wiring PDFDocument13 pagesWiring PDFBoulos NassarNo ratings yet
- Pulse Charge With Single InductorDocument4 pagesPulse Charge With Single Inductorkcarring100% (1)
- Sadelmi Power: List of ReferencesDocument24 pagesSadelmi Power: List of ReferencesBoulos NassarNo ratings yet
- Review On Desulfation of Lead-Acid Battery For HevDocument12 pagesReview On Desulfation of Lead-Acid Battery For Hevstark2006No ratings yet
- Leaching Spent Batteries Powder Sodium Carbonate CO2Document6 pagesLeaching Spent Batteries Powder Sodium Carbonate CO2Boulos NassarNo ratings yet
- CAT - C15-500 - EN 500kVADocument1 pageCAT - C15-500 - EN 500kVAAmmar Lateef GakharNo ratings yet
- DesulfatorDocument5 pagesDesulfatormad659No ratings yet
- Split Unit MUE 18HR (6 Pieces)Document1 pageSplit Unit MUE 18HR (6 Pieces)Boulos NassarNo ratings yet
- 19A00142Document1 page19A00142Boulos NassarNo ratings yet
- Waste Handling Cranes: Power Cable Integrated With The DrumDocument1 pageWaste Handling Cranes: Power Cable Integrated With The DrumBoulos NassarNo ratings yet
- Lowara ESV 50Hz en LDocument72 pagesLowara ESV 50Hz en LmbgprsmsNo ratings yet
- GBDocument2 pagesGBBoulos NassarNo ratings yet
- 3gaa112312 AeeDocument2 pages3gaa112312 AeeBoulos NassarNo ratings yet
- 3GAA112312 BSE M3aa 112mb 4Document2 pages3GAA112312 BSE M3aa 112mb 4Boulos NassarNo ratings yet
- Load Cell Cabling Setup and Trimming GuideDocument8 pagesLoad Cell Cabling Setup and Trimming GuideTong Van NgocNo ratings yet
- Item ModelDocument1 pageItem ModelBoulos NassarNo ratings yet
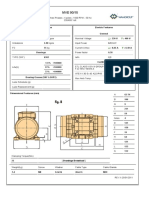
- Mve90 15Document1 pageMve90 15Boulos NassarNo ratings yet
- 3gaa112312 BseDocument2 pages3gaa112312 BseBoulos NassarNo ratings yet
- Silica Gel Emitter PreparationDocument2 pagesSilica Gel Emitter PreparationBoulos NassarNo ratings yet
- Transesterification of Oil TBGDocument6 pagesTransesterification of Oil TBGSNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- #1 Basic Functions of The Hand-1Document29 pages#1 Basic Functions of The Hand-1Yosep Gustiy PanguestueNo ratings yet
- OHSAS 18001-2007 Lead Auditor CourseDocument3 pagesOHSAS 18001-2007 Lead Auditor Coursesharaby81No ratings yet
- COACHING CLINIC WEEKLY 7 Dec 2020Document154 pagesCOACHING CLINIC WEEKLY 7 Dec 2020cleveretoNo ratings yet
- CDMA Telephone TroubleshootingDocument30 pagesCDMA Telephone Troubleshootingsaboor ashraf100% (1)
- JapaneseDocument250 pagesJapaneseAlberto VillalbaNo ratings yet
- Bulk Storage SilosDocument5 pagesBulk Storage SilosMiran VidovićNo ratings yet
- QUIZ ONE Learning DisabilitiesDocument22 pagesQUIZ ONE Learning DisabilitiesAbednego AckomNo ratings yet
- Philo Lesson on Diversity, Filipino Thinking & AbundanceDocument8 pagesPhilo Lesson on Diversity, Filipino Thinking & AbundanceRussel Vincent ManaloNo ratings yet
- Design Guide For Local Dimming Backlight With TLC6C5748-Q1Document7 pagesDesign Guide For Local Dimming Backlight With TLC6C5748-Q1Carlos RuizNo ratings yet
- HYDRAULICS Day 1Document13 pagesHYDRAULICS Day 1Gerald OrtizNo ratings yet
- 1 Task Achievement/ Task Response Academic Writing Task 1: Charts, Graphs, TablesDocument6 pages1 Task Achievement/ Task Response Academic Writing Task 1: Charts, Graphs, TablesAnh AnhNo ratings yet
- Biological Activities of Stilbenoids: Molecular SciencesDocument25 pagesBiological Activities of Stilbenoids: Molecular SciencesAna PaulaNo ratings yet
- Evidence DisputeDocument10 pagesEvidence DisputeAlexPamintuanAbitanNo ratings yet
- Contrastive Analysis PDFDocument107 pagesContrastive Analysis PDFNacro HakimNo ratings yet
- Curriculum Brochure - StudentsDocument9 pagesCurriculum Brochure - StudentsAbhishek.No ratings yet
- CSP FlexDocument4 pagesCSP FlexBhoomaiah Sunkenapalli100% (1)
- Order To Cash SAP SDDocument15 pagesOrder To Cash SAP SDWanderAndradeNo ratings yet
- Method Statement - 23apr18Document5 pagesMethod Statement - 23apr18hinitahNo ratings yet
- Health Care Facilities and Medical Gas and VacuumDocument27 pagesHealth Care Facilities and Medical Gas and VacuumStephen TabiarNo ratings yet
- MCT-MST Summative Teaching Placement Assessment Rubric - EPC 4406 - 17 PagesDocument17 pagesMCT-MST Summative Teaching Placement Assessment Rubric - EPC 4406 - 17 PagesHuda HamadNo ratings yet
- GTUG PacketMAX AF1G52 WEB GUI Guide 3.0.9.dDocument103 pagesGTUG PacketMAX AF1G52 WEB GUI Guide 3.0.9.dJuan David BoteroNo ratings yet
- Incoming Inspection Procedure: Document Part No. Rev 100-0044 007 1 of 11Document11 pagesIncoming Inspection Procedure: Document Part No. Rev 100-0044 007 1 of 11Sandip Jawalkar100% (1)
- SWIFT ChecklistDocument5 pagesSWIFT Checklistফয়সাল হোসেনNo ratings yet
- Communication Network Architecture of A Smart Grid: by Manasa Swamireddy and Koushik PuppalaDocument28 pagesCommunication Network Architecture of A Smart Grid: by Manasa Swamireddy and Koushik Puppalamanasa28112002No ratings yet
- Beechtree ISCDocument6 pagesBeechtree ISCWinterNo ratings yet
- DecayDocument76 pagesDecayBurning EmpireNo ratings yet
- Design and Construction of A Tower Crane: June 2009Document6 pagesDesign and Construction of A Tower Crane: June 2009Beza GetachewNo ratings yet
- Project Report BCA Final Year-AayushDocument36 pagesProject Report BCA Final Year-Aayushaayush83% (6)
- Ch. Devilal State Institute of Engineering and Technology, Panniwala Mota (Sirsa)Document15 pagesCh. Devilal State Institute of Engineering and Technology, Panniwala Mota (Sirsa)NKNo ratings yet
- 2-Amino-5-Aryl-2-Oxazolines.: (,ee TableDocument7 pages2-Amino-5-Aryl-2-Oxazolines.: (,ee TableChristopher HowellNo ratings yet