You might also like
- Da AaaaaaaaaaDocument1 pageDa AaaaaaaaaaastrokpoNo ratings yet
- Puskesmas AkdkjhkjkdjkdjDocument1 pagePuskesmas AkdkjhkjkdjkdjastrokpoNo ratings yet
- DDDD DDDD DDDD DDDDDocument1 pageDDDD DDDD DDDD DDDDastrokpoNo ratings yet
- SFDDJHGKHJDocument1 pageSFDDJHGKHJastrokpoNo ratings yet
- A A AaaaaaaaaaaaDocument1 pageA A AaaaaaaaaaaaastrokpoNo ratings yet
- Jowdskl Sklask LDocument1 pageJowdskl Sklask LastrokpoNo ratings yet
- Sandi EirprirkfkljfhklsDocument1 pageSandi EirprirkfkljfhklsastrokpoNo ratings yet
- SdzgfdujhghkjhDocument1 pageSdzgfdujhghkjhastrokpoNo ratings yet
- KDKDSNDVZKDKDocument1 pageKDKDSNDVZKDKastrokpoNo ratings yet
- K KLFGLKFGKLFGDocument1 pageK KLFGLKFGKLFGastrokpoNo ratings yet
- HssjsklslsDocument1 pageHssjsklslsastrokpoNo ratings yet
- NkjjklsDocument1 pageNkjjklsastrokpoNo ratings yet
- KDFLKDLFDKLDocument1 pageKDFLKDLFDKLastrokpoNo ratings yet
- RLD KF'SD FKFKFKF' MDDKKD JDDD D D DDocument1 pageRLD KF'SD FKFKFKF' MDDKKD JDDD D D DastrokpoNo ratings yet
- KFKFKFKFDocument2 pagesKFKFKFKFastrokpoNo ratings yet
- MGSKGSKSGDocument1 pageMGSKGSKSGastrokpoNo ratings yet
- LKNFSDKNSDFK GFDocument1 pageLKNFSDKNSDFK GFastrokpoNo ratings yet
- QwertyDocument1 pageQwertyastrokpoNo ratings yet
- QwertyDocument1 pageQwertyastrokpoNo ratings yet
- IojjkjkklklklDocument1 pageIojjkjkklklklastrokpoNo ratings yet
- KJLKKLDocument1 pageKJLKKLastrokpoNo ratings yet
- ZXDGDFHDocument1 pageZXDGDFHastrokpoNo ratings yet
- Jefjfakoragkwgealargl'GraDocument2 pagesJefjfakoragkwgealargl'GraastrokpoNo ratings yet
- Qwerty 1Document1 pageQwerty 1astrokpoNo ratings yet
- ZXDGDFHDocument1 pageZXDGDFHastrokpoNo ratings yet
- New Microsoft Office Excel WorksheetDocument1 pageNew Microsoft Office Excel WorksheetjadiduitcepekNo ratings yet
- QwertyDocument1 pageQwertyastrokpoNo ratings yet
- QwertyDocument1 pageQwertyastrokpoNo ratings yet
- BKNMCLDocument1 pageBKNMCLastrokpoNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- BetastarDocument66 pagesBetastarSamuel MorenoNo ratings yet
- Rectifier Diodes BYW29 Series Ultrafast: General Description Quick Reference DataDocument6 pagesRectifier Diodes BYW29 Series Ultrafast: General Description Quick Reference DataEddy Santiago Neira SisaNo ratings yet
- Electro 3 PrefinalsDocument5 pagesElectro 3 PrefinalsJuan Miguel TorresNo ratings yet
- MoparDocument743 pagesMoparSergio AlvarezNo ratings yet
- MBDCDocument2 pagesMBDCRachel RobinsonNo ratings yet
- HD44780 CommandsDocument3 pagesHD44780 CommandsPhani ChakravarthiNo ratings yet
- Sening® Nomix Cross-Over Prevention: We Put You First. and Keep You AheadDocument4 pagesSening® Nomix Cross-Over Prevention: We Put You First. and Keep You AheadJoseNo ratings yet
- KingFisher1801 Britomatics Machine ManualDocument41 pagesKingFisher1801 Britomatics Machine ManualtecnicosyaNo ratings yet
- GMK Manitowoc Training Catalog 2020Document32 pagesGMK Manitowoc Training Catalog 2020aleksandr100% (1)
- AIL Dahej Operation Manual For 18 Inch Dia. 15 Plates Zero Hold Up Sparkler Filter SystemDocument4 pagesAIL Dahej Operation Manual For 18 Inch Dia. 15 Plates Zero Hold Up Sparkler Filter SystemRishabh VermaNo ratings yet
- KSG 5K DMDocument2 pagesKSG 5K DMGirasolar solarNo ratings yet
- To-5 Relays Established Reliability Military DPDT: Series 412Document9 pagesTo-5 Relays Established Reliability Military DPDT: Series 412Afzal ImamNo ratings yet
- m10-3 Oil Purifier Operation Manual 3aDocument76 pagesm10-3 Oil Purifier Operation Manual 3aDavid BogdanNo ratings yet
- Honeywell Sensing Micro Switch BZ Large Basic Product Sheet 004955 5 en PDFDocument23 pagesHoneywell Sensing Micro Switch BZ Large Basic Product Sheet 004955 5 en PDFGus LopezNo ratings yet
- Ca and CH Series: Product SpecificationsDocument12 pagesCa and CH Series: Product SpecificationsMark ThomasNo ratings yet
- Ventilation Control Panel ProjectDocument4 pagesVentilation Control Panel ProjectHao DinhNo ratings yet
- Manual de Programador ASiDocument12 pagesManual de Programador ASitoques75No ratings yet
- 11 KV Ring Main Units and AccessoriesDocument35 pages11 KV Ring Main Units and AccessoriesAbdus Salam0% (1)
- 13481981Document17 pages13481981Anonymous xFV7bg7Q100% (1)
- MIC-101 Instruction Sheet 11-15-2022Document2 pagesMIC-101 Instruction Sheet 11-15-2022Ken DizzeruNo ratings yet
- How To Inspect A GearboxDocument13 pagesHow To Inspect A Gearboxkamal arabNo ratings yet
- AEG Electric Motors Mechanical Design and Technical SpecificationsDocument13 pagesAEG Electric Motors Mechanical Design and Technical SpecificationsJosé Eduardo Gaete DuarteNo ratings yet
- How To Read Capacitance Values On A Capacitor - B - DummiesDocument4 pagesHow To Read Capacitance Values On A Capacitor - B - DummiesVikas KumarNo ratings yet
- Chapter III - Electrical Power Generation Using Speed Breaker - Jefferson BeloDocument6 pagesChapter III - Electrical Power Generation Using Speed Breaker - Jefferson BeloJefferson BeloNo ratings yet
- RXS J DatabookDocument39 pagesRXS J Databookjbgb3335616No ratings yet
- HST-2 Expansion Anchor Technical DatasheetDocument11 pagesHST-2 Expansion Anchor Technical DatasheetThe KeymasterNo ratings yet
- How Do I Know If My Blower Relay Fuse Is BlownDocument3 pagesHow Do I Know If My Blower Relay Fuse Is BlownWaleed MuzafarNo ratings yet
- AB HPGR BrochureDocument28 pagesAB HPGR BrochurepaoloNo ratings yet
- Hyundai Silang Offers New Accent GL 1.4 6SPD M/TDocument2 pagesHyundai Silang Offers New Accent GL 1.4 6SPD M/TRizaldy BudahNo ratings yet
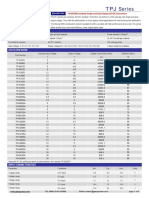
- TPJ, 1W SIP7 DC-DC Converters Power SupplyDocument3 pagesTPJ, 1W SIP7 DC-DC Converters Power SupplytoppowerNo ratings yet