You might also like
- An Approach of Voltage Stability Analysis For IEEE 9 Bus System With UPFCDocument12 pagesAn Approach of Voltage Stability Analysis For IEEE 9 Bus System With UPFCDrMohammad Rafee ShaikNo ratings yet
- MATLAB/SIMULINK Based Model of Single-Machine Infinite-Bus With TCSC For Stability Studies and Tuning Employing GADocument10 pagesMATLAB/SIMULINK Based Model of Single-Machine Infinite-Bus With TCSC For Stability Studies and Tuning Employing GAmoji7611No ratings yet
- Simulation of First Benchmark Model For Analysis of Subsynchronous Resonance in Power Systems Using SequelDocument7 pagesSimulation of First Benchmark Model For Analysis of Subsynchronous Resonance in Power Systems Using SequelPabloNalogowskiNo ratings yet
- Coordination Design PSS and TCSC Controller For Power System Stability Improvement Using CLA-PSO AlgorithmDocument10 pagesCoordination Design PSS and TCSC Controller For Power System Stability Improvement Using CLA-PSO Algorithmvinodkumar57No ratings yet
- RRCM 0003Document21 pagesRRCM 0003Rahul N SagarNo ratings yet
- Optimal Multiobjective Design of Power System Stabilizers Using Simulated AnnealingDocument12 pagesOptimal Multiobjective Design of Power System Stabilizers Using Simulated Annealingashikhmd4467No ratings yet
- MATLAB/SIMULINK Based Model of Single-Machine Infinite-Bus With TCSC For Stability Studies and Tuning Employing GADocument10 pagesMATLAB/SIMULINK Based Model of Single-Machine Infinite-Bus With TCSC For Stability Studies and Tuning Employing GApragatinareshNo ratings yet
- Avr 555Document5 pagesAvr 555makroumNo ratings yet
- Mathematical Modeling of Five-Phase vs Three-Phase Induction MotorsDocument17 pagesMathematical Modeling of Five-Phase vs Three-Phase Induction MotorsKill MongerNo ratings yet
- SMC (SE) - Capstone Project - PresentationDocument28 pagesSMC (SE) - Capstone Project - PresentationShun Myat ChalNo ratings yet
- SSRN Id3536283Document14 pagesSSRN Id3536283Likamata Gedeon NadaNo ratings yet
- Inverter Grid Synchronization-A Review and Simulation: Ms. Prajakta R. Narkhede, Dr.P.J.ShahDocument11 pagesInverter Grid Synchronization-A Review and Simulation: Ms. Prajakta R. Narkhede, Dr.P.J.ShahPrajakta dahakeNo ratings yet
- 9 Bus Ieee Weak BusDocument12 pages9 Bus Ieee Weak BusManorath PrasadNo ratings yet
- PDFDocument8 pagesPDFtanmayNo ratings yet
- Sensitivity Analysis of IM Speed Estimation AlgorithmDocument18 pagesSensitivity Analysis of IM Speed Estimation Algorithmmechernene_aek9037No ratings yet
- Feedback Linearized Model of DC Motor Using Differential GeometryDocument6 pagesFeedback Linearized Model of DC Motor Using Differential GeometryIfrah ParvezNo ratings yet
- Design of Robust Power System Stabilizer Using Mixed Sensitivity Based H Output-Feedback Control in LMI FrameworkDocument6 pagesDesign of Robust Power System Stabilizer Using Mixed Sensitivity Based H Output-Feedback Control in LMI FrameworkFernando RamosNo ratings yet
- Modeling and Simulation of Induction Generators in Wind Power Applications Using High-Order ModelsDocument15 pagesModeling and Simulation of Induction Generators in Wind Power Applications Using High-Order ModelsKVV100% (1)
- Optimal Controller Design of Three-Phase Controlled Rectifier Using Artificial Intelligence TechniquesDocument9 pagesOptimal Controller Design of Three-Phase Controlled Rectifier Using Artificial Intelligence Techniquesankit_elect27No ratings yet
- keywords" content="call for paper 2012, hard copy of journal, research paper publishing, where to publish research paper, journal publishing, how to publish research paper, Call For research paper, international journal, publishing a paper, IJERD, journal of science and technology, how to get a research paper published, publishing a paper, publishing of journal, publishing of research paper, reserach and review articles, IJERD Journal, How to publish your research paper, publish research paper, open access engineering journal, Engineering journal, Mathemetics journal, Physics journal, Chemistry journal, Computer Engineering, Computer Science journal, how to submit your paper, peer reviw journal, indexed journal, reserach and review articles, engineering journal, www.ijerd.com, research journals, yahoo journals, bing journals, International Journal of Engineering Research and Development, google journals, hard copy of journal,Document8 pageskeywords" content="call for paper 2012, hard copy of journal, research paper publishing, where to publish research paper, journal publishing, how to publish research paper, Call For research paper, international journal, publishing a paper, IJERD, journal of science and technology, how to get a research paper published, publishing a paper, publishing of journal, publishing of research paper, reserach and review articles, IJERD Journal, How to publish your research paper, publish research paper, open access engineering journal, Engineering journal, Mathemetics journal, Physics journal, Chemistry journal, Computer Engineering, Computer Science journal, how to submit your paper, peer reviw journal, indexed journal, reserach and review articles, engineering journal, www.ijerd.com, research journals, yahoo journals, bing journals, International Journal of Engineering Research and Development, google journals, hard copy of journal,IJERDNo ratings yet
- Ajassp 2011 103Document4 pagesAjassp 2011 103adamalishahNo ratings yet
- Multi Line Flexible Alternating Current Transmission System FACTS Controller For Transient Stability Analysis of A Multi MachinDocument11 pagesMulti Line Flexible Alternating Current Transmission System FACTS Controller For Transient Stability Analysis of A Multi MachinMary MorseNo ratings yet
- Matlab Tool Compares Power System Dynamics with PSS/EDocument5 pagesMatlab Tool Compares Power System Dynamics with PSS/ELuis Alonso Aguirre LopezNo ratings yet
- 2 Symposium On Lift and Escalator TechnologiesDocument12 pages2 Symposium On Lift and Escalator TechnologiesfreddyjoertyNo ratings yet
- Global Voltage Stability Analysis of A Power System Using Network Equivalencing Technique in The Presence of TCSCDocument18 pagesGlobal Voltage Stability Analysis of A Power System Using Network Equivalencing Technique in The Presence of TCSCblaagicaNo ratings yet
- Research Article: Identification and Real Time Speed Control of A Series DC MotorDocument12 pagesResearch Article: Identification and Real Time Speed Control of A Series DC Motorelectricite industrielleNo ratings yet
- A Digital-Based Optimal AVR Design of Synchronous Generator Exciter Using LQR TechniqueDocument13 pagesA Digital-Based Optimal AVR Design of Synchronous Generator Exciter Using LQR Technique3KaiserENo ratings yet
- DETC2017-67126: On The Adrc of Non-Differentially Flat, Underactuated, Nonlinear Systems: An Experimental Case StudyDocument8 pagesDETC2017-67126: On The Adrc of Non-Differentially Flat, Underactuated, Nonlinear Systems: An Experimental Case StudyEfrain HernándezNo ratings yet
- A Complete Modeling and Control For Wind Turbine Based of A Doubly Fed Induction Generator Using Direct Power ControlDocument9 pagesA Complete Modeling and Control For Wind Turbine Based of A Doubly Fed Induction Generator Using Direct Power ControlKheira BelgacemNo ratings yet
- Simulation of IEEE First Benchmark Model For SSR StudiesDocument4 pagesSimulation of IEEE First Benchmark Model For SSR StudiesPabloNalogowskiNo ratings yet
- Discrete Time Models of A Continuous Power System StabilizerDocument6 pagesDiscrete Time Models of A Continuous Power System StabilizerAhmed Essam Abd RabouNo ratings yet
- Optimal Location of SVC and TCSC For Voltage Stability EnhancementDocument6 pagesOptimal Location of SVC and TCSC For Voltage Stability EnhancementnikhileshwarNo ratings yet
- MATLAB Implementation of Memristor Based Chua S Circuit and Its Chaos ControlDocument9 pagesMATLAB Implementation of Memristor Based Chua S Circuit and Its Chaos ControlKhadar BashaNo ratings yet
- Dissipativity Properties of Detailed Models of Synchronous GeneratorsDocument6 pagesDissipativity Properties of Detailed Models of Synchronous Generatorssridhar_n@email.comNo ratings yet
- Evaluation of Performance of FACTS Based Phase Imbalance Schemes For Damping Torsional Oscillations and Power SwingsDocument8 pagesEvaluation of Performance of FACTS Based Phase Imbalance Schemes For Damping Torsional Oscillations and Power Swingsdeepak_27No ratings yet
- Journal Paper 3Document12 pagesJournal Paper 3Jafaru UsmanNo ratings yet
- Unbalanced Three-Phase Distribution SystemDocument5 pagesUnbalanced Three-Phase Distribution SystemIraj Az IraniNo ratings yet
- Letters: Accurate Steady-State Representation of A Doubly Fed Induction MachineDocument6 pagesLetters: Accurate Steady-State Representation of A Doubly Fed Induction MachineAmy Leigh WilliamsNo ratings yet
- Online Control of SVC Using ANN Based Pole Placement ApproachDocument5 pagesOnline Control of SVC Using ANN Based Pole Placement ApproachAbdo AliNo ratings yet
- DC Motor State Space ModelDocument5 pagesDC Motor State Space ModelSelaRajNo ratings yet
- A Modified Heffron Phillip's Model For The Design of Power System StabilizersDocument6 pagesA Modified Heffron Phillip's Model For The Design of Power System Stabilizersranjeet singhNo ratings yet
- DETERMINING LOCATIONS FOR POWER SYSTEM STABILIZERSDocument9 pagesDETERMINING LOCATIONS FOR POWER SYSTEM STABILIZERSSherif HelmyNo ratings yet
- Design and Simulation of Control System For Bearingless Synchronous Reluctance Motor PDFDocument5 pagesDesign and Simulation of Control System For Bearingless Synchronous Reluctance Motor PDFKrishnam NaiduNo ratings yet
- Performance Enhancement of Grid Connected Wind Energy Conversion SystemsDocument6 pagesPerformance Enhancement of Grid Connected Wind Energy Conversion Systemskanda71No ratings yet
- Optimum Tuning UPFC Via ACODocument8 pagesOptimum Tuning UPFC Via ACORuzaini GcornNo ratings yet
- Decentralized Linear Quadratic Power System Stabilizers For Multi-Machine Power SystemsDocument17 pagesDecentralized Linear Quadratic Power System Stabilizers For Multi-Machine Power SystemsPABLO MAURONo ratings yet
- Enhancement of Stability of SMIB Using ZN-PID and LQR-PSS As Affected by Excitation ControlDocument6 pagesEnhancement of Stability of SMIB Using ZN-PID and LQR-PSS As Affected by Excitation ControlAshik AhmedNo ratings yet
- Observer-Based Reduced Order Controller Design For The Stabilization of Large Scale Linear Discrete-Time Control SystemsDocument11 pagesObserver-Based Reduced Order Controller Design For The Stabilization of Large Scale Linear Discrete-Time Control SystemsijcseitNo ratings yet
- Analysis and Assessment of STATCOM-based Damping Stabilizers For Power System Stability EnhancementDocument9 pagesAnalysis and Assessment of STATCOM-based Damping Stabilizers For Power System Stability EnhancementsirageldeenNo ratings yet
- Doubly-Fed Induction Generator Modeling and Control in Digsilent PowerfactoryDocument7 pagesDoubly-Fed Induction Generator Modeling and Control in Digsilent PowerfactoryMaloni Alcantara JimenezNo ratings yet
- Synthesis of The Adaptive Excitation Control System of High Power Synchronous GeneratorsDocument14 pagesSynthesis of The Adaptive Excitation Control System of High Power Synchronous Generators3KaiserENo ratings yet
- Design, Testing, and Analysis of STATCOM and TCSC For Real-Time SimulationDocument19 pagesDesign, Testing, and Analysis of STATCOM and TCSC For Real-Time Simulationtien chau minhNo ratings yet
- Simulation of Six Phase Permanent Magnet Synchronous Generator in MATLABDocument5 pagesSimulation of Six Phase Permanent Magnet Synchronous Generator in MATLABجمال ضيفيNo ratings yet
- Iarjset 16 P125Document8 pagesIarjset 16 P125Việt NguyễnNo ratings yet
- Stator Flux and Speed - HADocument6 pagesStator Flux and Speed - HAhieuhuech1No ratings yet
- Supercapacitor E-STATCOM For Power System Performance EnhancementDocument5 pagesSupercapacitor E-STATCOM For Power System Performance EnhancementDavid StuartNo ratings yet
- Dynamic Simulation For Three Phase Induction Motor and Speed Control Using Matlab SimulinkDocument10 pagesDynamic Simulation For Three Phase Induction Motor and Speed Control Using Matlab SimulinkYugendran KumaravelNo ratings yet
- A Visual Tool For Building Synchronous GeneratorDocument6 pagesA Visual Tool For Building Synchronous GeneratorpolicarpoNo ratings yet
- Damping Control TorqueDocument26 pagesDamping Control TorqueCarlos Ortiz de ZevallosNo ratings yet
- 309a Engineering Data SheetDocument17 pages309a Engineering Data SheetKarwai CHNo ratings yet
- The Seven Types of Power Problems: White Paper 18Document21 pagesThe Seven Types of Power Problems: White Paper 18FELIXDEJNo ratings yet
- CLKT, Clkto, CLV: Infrared WindowDocument4 pagesCLKT, Clkto, CLV: Infrared WindowkoushkiNo ratings yet
- LM-100 Light MeterDocument2 pagesLM-100 Light MeterNirmal mehtaNo ratings yet
- CNDocument2 pagesCNNirmal mehtaNo ratings yet
- Aaaa PDFDocument1 pageAaaa PDFNirmal mehtaNo ratings yet
- Appendix D Power Electronics Journals Conferences WorkshopsDocument2 pagesAppendix D Power Electronics Journals Conferences WorkshopsNirmal mehtaNo ratings yet
- Et214 2005 PDFDocument17 pagesEt214 2005 PDFNirmal mehtaNo ratings yet
- TACH-10: Contact / Non-Contact TachometerDocument2 pagesTACH-10: Contact / Non-Contact TachometeraNo ratings yet
- 110 V Systems RCD TestingDocument1 page110 V Systems RCD TestingNirmal mehtaNo ratings yet
- PLC Intro PDFDocument16 pagesPLC Intro PDFNirmal mehtaNo ratings yet
- RCDT300 Series Residual Current Device TestersDocument4 pagesRCDT300 Series Residual Current Device TestersNirmal mehtaNo ratings yet
- Special Considerations PLCDocument32 pagesSpecial Considerations PLCdilipelineNo ratings yet
- Kijk PDFDocument1 pageKijk PDFNirmal mehtaNo ratings yet
- Measurement of Overall Power Loss For Different Three Phase 100kVA Transformer Core MaterialDocument3 pagesMeasurement of Overall Power Loss For Different Three Phase 100kVA Transformer Core MaterialNirmal mehtaNo ratings yet
- DET14C DET24C 2001 644 - QS - en FR de Es NL - V04Document8 pagesDET14C DET24C 2001 644 - QS - en FR de Es NL - V04Nirmal mehtaNo ratings yet
- Mto210 Ds Us V09aDocument2 pagesMto210 Ds Us V09aNirmal mehtaNo ratings yet
- VAX 020 High Voltage Amplifier Expands IDAX Range to 2 kVDocument2 pagesVAX 020 High Voltage Amplifier Expands IDAX Range to 2 kVNirmal mehtaNo ratings yet
- LTC135 DS en V04Document2 pagesLTC135 DS en V04Nirmal mehtaNo ratings yet
- User Login: You Are Currently Logged Out. Please Enter Your User ID and Password To Log inDocument1 pageUser Login: You Are Currently Logged Out. Please Enter Your User ID and Password To Log inNirmal mehtaNo ratings yet
- Gujarat Technological University (Established Under Gujarat Act No. 20 of 2007)Document1 pageGujarat Technological University (Established Under Gujarat Act No. 20 of 2007)Nirmal mehtaNo ratings yet
- Delta4000 Ds Us V12aDocument4 pagesDelta4000 Ds Us V12aNirmal mehtaNo ratings yet
- Perspectives and Results On The Stability and Stabilizability of Hybrid SystemsDocument14 pagesPerspectives and Results On The Stability and Stabilizability of Hybrid SystemsNirmal mehtaNo ratings yet
- Bba B0118 2 PDFDocument2 pagesBba B0118 2 PDFNirmal mehtaNo ratings yet
- Lopes 2006Document10 pagesLopes 2006Nirmal mehtaNo ratings yet
- How To Write The Methods Section of A Research PaperDocument4 pagesHow To Write The Methods Section of A Research PaperManish Chandra Prabhakar0% (1)
- M.Tech.: Subject Code Paper ID: (E0602)Document2 pagesM.Tech.: Subject Code Paper ID: (E0602)Nirmal mehtaNo ratings yet
- Asst Eng Civi Eng Advt 08 2014 15 PDFDocument3 pagesAsst Eng Civi Eng Advt 08 2014 15 PDFNirmal mehtaNo ratings yet
- B0118Document2 pagesB0118Nirmal mehtaNo ratings yet
- Complete Checklist for Manual Upgrades to Oracle Database 12c R1Document27 pagesComplete Checklist for Manual Upgrades to Oracle Database 12c R1Augustine OderoNo ratings yet
- 8 Bit Invaders RulesDocument4 pages8 Bit Invaders RulesRollo MirfinoNo ratings yet
- Built-In Exceptions in PythonDocument6 pagesBuilt-In Exceptions in PythonUjwala BhogaNo ratings yet
- Gas Range: Defsgg 24 SsDocument20 pagesGas Range: Defsgg 24 Ssfaker fake fakersonNo ratings yet
- VRMP Projects - #973 Hgu Reformer Insulation Monthly Completion Plan Project: Reformer Works - HGU-EPCC 6, HPCL, VIZAGDocument1 pageVRMP Projects - #973 Hgu Reformer Insulation Monthly Completion Plan Project: Reformer Works - HGU-EPCC 6, HPCL, VIZAGsusantaNo ratings yet
- WFT Composite PlugsDocument11 pagesWFT Composite Plugsahmad haqkim muhamad malackNo ratings yet
- Jumeirah Group Future IssuesDocument3 pagesJumeirah Group Future Issueshaelstone100% (1)
- B2B ApiDocument350 pagesB2B ApiratnavelpNo ratings yet
- Sabri Toyyab Resume Spring 2019Document2 pagesSabri Toyyab Resume Spring 2019api-457400663No ratings yet
- Is 15560 - 2005Document12 pagesIs 15560 - 2005kalpanaadhiNo ratings yet
- Transportation System, Analysis and Modelling (CE-632) : Carried Out by Group-3Document15 pagesTransportation System, Analysis and Modelling (CE-632) : Carried Out by Group-3Naman Kumar100% (2)
- JetFlash Online Recovery User Manual - ENDocument10 pagesJetFlash Online Recovery User Manual - ENSubrata DattaNo ratings yet
- Pyxis SPT HepDocument597 pagesPyxis SPT HepanithaarumallaNo ratings yet
- Detail A: STEEL BEAM (300x150x6.5x9)Document1 pageDetail A: STEEL BEAM (300x150x6.5x9)Aaris AdeNo ratings yet
- Course Overview CSC 1707 Maths For ComputingDocument16 pagesCourse Overview CSC 1707 Maths For ComputingSarah JNo ratings yet
- 4-way switch wiring diagram for a 2 pickup guitarDocument1 page4-way switch wiring diagram for a 2 pickup guitarNebojša JoksimovićNo ratings yet
- Waterfall Model - The Original Software Development Process ModelDocument3 pagesWaterfall Model - The Original Software Development Process ModelmushfiqNo ratings yet
- Understanding Operating Systems Fifth Edition: Memory Management: Virtual MemoryDocument21 pagesUnderstanding Operating Systems Fifth Edition: Memory Management: Virtual MemoryRidzuan DolahNo ratings yet
- ANTRICE S.A. POWER SUPPLY RACKDocument3 pagesANTRICE S.A. POWER SUPPLY RACKmichaelliu123456No ratings yet
- Exercise 4 - HERBICIDE CALCULATION - MSMP Version - Docx Version 1Document4 pagesExercise 4 - HERBICIDE CALCULATION - MSMP Version - Docx Version 1Omaiwa Mo ShinderuNo ratings yet
- Precast Concrete Septic Tank 5000dsDocument1 pagePrecast Concrete Septic Tank 5000dsMarco Vega TaipeNo ratings yet
- FloEFD For Creo InstallDocument18 pagesFloEFD For Creo InstallDarko MarjanovicNo ratings yet
- Temporary Revision 12 053: Aircraft Maintenance ManualDocument26 pagesTemporary Revision 12 053: Aircraft Maintenance ManualKentNo ratings yet
- Citrix Xen Desktop Interview Questions and Answers - Citrix Xen Desktop FAQsDocument3 pagesCitrix Xen Desktop Interview Questions and Answers - Citrix Xen Desktop FAQsAnonymous rNmxZViYaNo ratings yet
- Mindmup Group-2Document10 pagesMindmup Group-2api-271772521No ratings yet
- SAP-Press - Abap Development For Sap HanaDocument30 pagesSAP-Press - Abap Development For Sap HananicocastanioNo ratings yet
- Tecumseh Service Repair Manual VH80 VH100 HH80 HH100 HH120 Oh120 Oh140 Oh160 Oh180 8HP Thru 18HP Cast Iron Engines 691462a PDFDocument78 pagesTecumseh Service Repair Manual VH80 VH100 HH80 HH100 HH120 Oh120 Oh140 Oh160 Oh180 8HP Thru 18HP Cast Iron Engines 691462a PDFDan Clarke75% (4)
- Acp 400020180910102625Document2 pagesAcp 400020180910102625Sofyan Andika YusufNo ratings yet
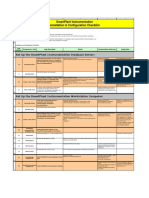
- SmartPlant Instrumentation installation checklistDocument2 pagesSmartPlant Instrumentation installation checklistmnoormohamed82No ratings yet
- Occupant Manikin Introduction: 95th Percentile Male Driver ModelDocument9 pagesOccupant Manikin Introduction: 95th Percentile Male Driver ModelarstjunkNo ratings yet