You might also like
- WaveletFiltering PDFDocument96 pagesWaveletFiltering PDFÁron FehérNo ratings yet
- Behzad Razavi - Design of CMOS Phase-Locked Loops - From Circuit Level To Architecture Level (2020, Cambridge University Press)Document507 pagesBehzad Razavi - Design of CMOS Phase-Locked Loops - From Circuit Level To Architecture Level (2020, Cambridge University Press)haoyue huang80% (5)
- CMOS Mixed-Signal Circuit DesignDocument343 pagesCMOS Mixed-Signal Circuit Design0 0No ratings yet
- Thales ANPRC-148 Product CatalogDocument48 pagesThales ANPRC-148 Product CatalogDavid Reber100% (1)
- Neural Networks - Basics Matlab PDFDocument59 pagesNeural Networks - Basics Matlab PDFWesley DoorsamyNo ratings yet
- Ellipse Fitting PDFDocument23 pagesEllipse Fitting PDFShabeeb Ali Oruvangara100% (1)
- Certification Study Guide 301b PDFDocument205 pagesCertification Study Guide 301b PDFtototimesNo ratings yet
- Channel Estimation and Equalization For 5G Wireless Communication SystemsDocument80 pagesChannel Estimation and Equalization For 5G Wireless Communication SystemsasrNo ratings yet
- QDB 15 Radio NavDocument83 pagesQDB 15 Radio NavKueh Chew Chai100% (13)
- Spectrum Analyzer and Spectrum Analysis: Shimshon Levy October 2012Document23 pagesSpectrum Analyzer and Spectrum Analysis: Shimshon Levy October 2012Daniel AguilarNo ratings yet
- WaveLet MatlabDocument85 pagesWaveLet Matlabradu-alexNo ratings yet
- Compression Techniques For Digital Hearing AidsDocument77 pagesCompression Techniques For Digital Hearing AidsDario SevieriNo ratings yet
- Loop Qualification For VDSL2Document77 pagesLoop Qualification For VDSL2dchardwareNo ratings yet
- IP Addressing and Subnetting IPv4 Workbook - Instructors Version - v2 - 1 PDFDocument89 pagesIP Addressing and Subnetting IPv4 Workbook - Instructors Version - v2 - 1 PDFfsrom375% (4)
- PLParEQ RefManDocument47 pagesPLParEQ RefMandbmcclainNo ratings yet
- Low-Noise Amplifier Design and Optimization: Master'S ThesisDocument0 pagesLow-Noise Amplifier Design and Optimization: Master'S Thesisjitu123456789No ratings yet
- Analysis of Massive MIMO Base Station Transceivers (PDFDrive)Document121 pagesAnalysis of Massive MIMO Base Station Transceivers (PDFDrive)Muh Nur FauziNo ratings yet
- Final Report Complete PDFDocument26 pagesFinal Report Complete PDFsudeendraNo ratings yet
- Design and characterization of a radio receiver for satellite communicationDocument64 pagesDesign and characterization of a radio receiver for satellite communicationHakan ÇaylakNo ratings yet
- Microwave Semiconductor Devices and Circuits NotesDocument31 pagesMicrowave Semiconductor Devices and Circuits NotesAnkur SagtaniNo ratings yet
- Aalborg University - Multipath Delay Estimation for OFDM Channel Estimation using Beamforming TechniquesDocument72 pagesAalborg University - Multipath Delay Estimation for OFDM Channel Estimation using Beamforming TechniquesRian BattlaxNo ratings yet
- Golap - ICCIE 2015Document166 pagesGolap - ICCIE 2015gkdNo ratings yet
- Analog Filters Using MATLABDocument14 pagesAnalog Filters Using MATLABThanhha NguyenNo ratings yet
- Wu2013 PDFDocument198 pagesWu2013 PDFKarima Ben salahNo ratings yet
- Lab 3Document29 pagesLab 3EngrAbdulQaderNo ratings yet
- Applied Electronics: Sallen Key (VCVS) 4rth Order Butter Worth Low Pass FilterDocument11 pagesApplied Electronics: Sallen Key (VCVS) 4rth Order Butter Worth Low Pass FilterkhayammcsNo ratings yet
- Switching Electronics - BetzDocument474 pagesSwitching Electronics - Betzanon-183726100% (7)
- Wireless Communications over MIMO Channels: Applications to CDMA and Multiple Antenna SystemsFrom EverandWireless Communications over MIMO Channels: Applications to CDMA and Multiple Antenna SystemsNo ratings yet
- Book Fall2011Document450 pagesBook Fall2011yuqiao1No ratings yet
- AN1131: Design Guide For Reducing Radiated and Conducted Emissions in Isolated Systems Using Silicon Labs' IsolatorsDocument42 pagesAN1131: Design Guide For Reducing Radiated and Conducted Emissions in Isolated Systems Using Silicon Labs' Isolatorsdinisiomisure.poliba.itNo ratings yet
- Project Report: Design and Simulation of A RLC Filter CircuitsDocument17 pagesProject Report: Design and Simulation of A RLC Filter CircuitsHassaan AhmedNo ratings yet
- Qucsactivefilter - Active Filter Synthesis Subsystem of QucsDocument41 pagesQucsactivefilter - Active Filter Synthesis Subsystem of QucsDilan ByteNo ratings yet
- Review Notes: Digital Signal Processing ELEC96010 (EE3-07)Document49 pagesReview Notes: Digital Signal Processing ELEC96010 (EE3-07)prasanna prasannaNo ratings yet
- ECE453 SP17 NotesDocument452 pagesECE453 SP17 Notesrenju91100% (1)
- Half Subcarrier ShiftDocument104 pagesHalf Subcarrier ShiftSrikanth ChintalaNo ratings yet
- VBLASTDocument63 pagesVBLASTCarlos Trujillo RojasNo ratings yet
- PHD Seminar BCDocument44 pagesPHD Seminar BCmgheryaniNo ratings yet
- ECE 4670 Communication Systems Laboratory Experiments ManualDocument86 pagesECE 4670 Communication Systems Laboratory Experiments ManualSalai JeyaseelanNo ratings yet
- Made S.A. - FYP ThesisDocument47 pagesMade S.A. - FYP ThesisSurya AdhiwirawanNo ratings yet
- ReportDocument23 pagesReportroxas9500No ratings yet
- Prony Method of IIR Filter DesignDocument49 pagesProny Method of IIR Filter DesignKarim ShahbazNo ratings yet
- Noise Cancellation Iitb PDFDocument42 pagesNoise Cancellation Iitb PDFTarun SNo ratings yet
- 2012 ISRO IISc STC ReportDocument149 pages2012 ISRO IISc STC ReportAhmadNo ratings yet
- Digital Filter Design Using MATLAB FDA ToolDocument12 pagesDigital Filter Design Using MATLAB FDA ToolNaav BamililiNo ratings yet
- Circulant and Elliptic Feedback Delay NeDocument28 pagesCirculant and Elliptic Feedback Delay NeGIUSEPPE CUZZUCOLINo ratings yet
- IIR Filter - Report: University of PisaDocument20 pagesIIR Filter - Report: University of PisaDuong Quynh GiangNo ratings yet
- Analysis, Design, Optimization and Realization of Compact High Performance Printed RF FiltersDocument149 pagesAnalysis, Design, Optimization and Realization of Compact High Performance Printed RF FiltersFa Mido ChemseddineNo ratings yet
- Blockchain Spec PDFDocument18 pagesBlockchain Spec PDFblueNo ratings yet
- Multi-channel Azimuth Processing TechniquesDocument15 pagesMulti-channel Azimuth Processing TechniqueskumarNo ratings yet
- High Efficiency and High Power Density, Isolated Bi-Directional DC-DC Converter For Residential Storage System (Project Proposal)Document17 pagesHigh Efficiency and High Power Density, Isolated Bi-Directional DC-DC Converter For Residential Storage System (Project Proposal)MUHAMMAD NOMAN SALEEMNo ratings yet
- Signal Denoising Using WaveletsDocument29 pagesSignal Denoising Using WaveletsTahir ZemouriNo ratings yet
- DSP For Matlab and Labview II - Discrete Frequency Transforms - Forrester W.isen (Morgan 2008 215s)Document215 pagesDSP For Matlab and Labview II - Discrete Frequency Transforms - Forrester W.isen (Morgan 2008 215s)EdwingtzNo ratings yet
- Tyler Moody ThesisDocument82 pagesTyler Moody ThesisPrateek KambojNo ratings yet
- Doblinger Matlab CourseDocument99 pagesDoblinger Matlab CourseAhlad KumarNo ratings yet
- Subharmonic MixersDocument200 pagesSubharmonic MixersMukthaPadakandlaNo ratings yet
- Modulation and Frequency Synthesis X Digital Wireless RadioDocument233 pagesModulation and Frequency Synthesis X Digital Wireless Radiolcnblzr3877No ratings yet
- Adrian - Ryser - SemesterThesis - 141218 Qubit PDFDocument19 pagesAdrian - Ryser - SemesterThesis - 141218 Qubit PDFMerlin Gilbert RajNo ratings yet
- RMQDocument74 pagesRMQeisseinNo ratings yet
- Introduction to Kalman Filtering Key ConceptsDocument74 pagesIntroduction to Kalman Filtering Key ConceptsYeow Tee SeongNo ratings yet
- Feature Extraction in Speech Coding and Recognition: Report of PHD Research Internship in Asp Group, Ogi-Ohsu, 2001/2002Document50 pagesFeature Extraction in Speech Coding and Recognition: Report of PHD Research Internship in Asp Group, Ogi-Ohsu, 2001/2002VõTrườngGiangNo ratings yet
- Bunce Ben Ece351 FinalDocument10 pagesBunce Ben Ece351 Finalapi-584316598No ratings yet
- Polar Codes Construction and Performance Analysis - Ramtin PedarsaniDocument48 pagesPolar Codes Construction and Performance Analysis - Ramtin PedarsaniguimanolNo ratings yet
- Lab Exercises:: Implementing An OFDM Transceiver by Software Defined RadioDocument37 pagesLab Exercises:: Implementing An OFDM Transceiver by Software Defined Radiozoom zoumbaNo ratings yet
- High-Speed Pipeline Analog-to-Digital Converter DesignDocument156 pagesHigh-Speed Pipeline Analog-to-Digital Converter DesignCarlos ManuelNo ratings yet
- Getting Started With Data Ion - Tally Remote Support - Tally Corporate Services - SQL To TallyDocument42 pagesGetting Started With Data Ion - Tally Remote Support - Tally Corporate Services - SQL To TallyalbimorkalNo ratings yet
- PCA-SIFT: A More Distinctive Local Image DescriptorDocument8 pagesPCA-SIFT: A More Distinctive Local Image DescriptorShabeeb Ali OruvangaraNo ratings yet
- CEX IMT Work PDFDocument4 pagesCEX IMT Work PDFShabeeb Ali OruvangaraNo ratings yet
- Cawoba Pitch DeckDocument11 pagesCawoba Pitch DeckShabeeb Ali OruvangaraNo ratings yet
- Bayesian Classifier Implementation Using MATLABDocument21 pagesBayesian Classifier Implementation Using MATLABShabeeb Ali OruvangaraNo ratings yet
- Wavelets and Filter Banks: 4C8 Integrated Systems DesignDocument41 pagesWavelets and Filter Banks: 4C8 Integrated Systems DesignShabeeb Ali OruvangaraNo ratings yet
- Wavelets and Filter Banks: 4C8 Integrated Systems DesignDocument41 pagesWavelets and Filter Banks: 4C8 Integrated Systems DesignShabeeb Ali OruvangaraNo ratings yet
- Pattern Recognition & Analysis Assignment - IiDocument19 pagesPattern Recognition & Analysis Assignment - IiShabeeb Ali OruvangaraNo ratings yet
- CEX IMT Work PDFDocument4 pagesCEX IMT Work PDFShabeeb Ali OruvangaraNo ratings yet
- Bayesian Classifier Implementation Using MATLABDocument21 pagesBayesian Classifier Implementation Using MATLABShabeeb Ali OruvangaraNo ratings yet
- Content Based Image RetrievalDocument12 pagesContent Based Image RetrievalShabeeb Ali OruvangaraNo ratings yet
- Pattern Recognition & Analysis Assignment - IiDocument19 pagesPattern Recognition & Analysis Assignment - IiShabeeb Ali OruvangaraNo ratings yet
- Signal Processing Lab: Shabeeb Ali O No.15 M.Tech, Signal Processing GEC, Kozhikode April 8, 2018Document5 pagesSignal Processing Lab: Shabeeb Ali O No.15 M.Tech, Signal Processing GEC, Kozhikode April 8, 2018Shabeeb Ali OruvangaraNo ratings yet
- FRS PDFDocument11 pagesFRS PDFShabeeb Ali OruvangaraNo ratings yet
- ESalsabeel Dhul Qa'Ad 1432Document32 pagesESalsabeel Dhul Qa'Ad 1432Shabeeb Ali OruvangaraNo ratings yet
- Signal Processing Lab: Shabeeb Ali O No.15 M.Tech, Signal Processing GEC, Kozhikode April 8, 2018Document5 pagesSignal Processing Lab: Shabeeb Ali O No.15 M.Tech, Signal Processing GEC, Kozhikode April 8, 2018Shabeeb Ali OruvangaraNo ratings yet
- Enum ItemDocument17 pagesEnum ItemDouglas OrtliebNo ratings yet
- Segmentation, Inference, and Classification of Partially Overlapping NanoparticlesDocument13 pagesSegmentation, Inference, and Classification of Partially Overlapping NanoparticlesShabeeb Ali OruvangaraNo ratings yet
- Presenattion 1Document18 pagesPresenattion 1Shabeeb Ali OruvangaraNo ratings yet
- Research MethodologyDocument14 pagesResearch MethodologyShabeeb Ali OruvangaraNo ratings yet
- ESalsabeel Dhul Hajj 1432Document32 pagesESalsabeel Dhul Hajj 1432Shabeeb Ali OruvangaraNo ratings yet
- EC303 Applied Electromagnetic Theory SyllabusDocument3 pagesEC303 Applied Electromagnetic Theory SyllabusShabeeb Ali Oruvangara100% (1)
- M.Tech Student's Image Processing AssignmentDocument17 pagesM.Tech Student's Image Processing AssignmentShabeeb Ali OruvangaraNo ratings yet
- 3.logic GatesDocument3 pages3.logic GatesShabeeb Ali OruvangaraNo ratings yet
- Academic Calendar 2017-18Document5 pagesAcademic Calendar 2017-18Srikanth KodothNo ratings yet
- Introduction to Image ClassificationDocument63 pagesIntroduction to Image ClassificationShabeeb Ali OruvangaraNo ratings yet
- D - Filter BankDocument40 pagesD - Filter BanksrmanoharaNo ratings yet
- Sony Ericsson E15i Xperia X8 Component PlacingDocument2 pagesSony Ericsson E15i Xperia X8 Component PlacingLuka PeicNo ratings yet
- Configure D-Link DRO-250i RouterDocument8 pagesConfigure D-Link DRO-250i RouterbgrdscmmcmNo ratings yet
- Media Box enDocument2 pagesMedia Box enDjMattGroeningNo ratings yet
- NATO Cyber Security Centre Bulletin: PAN/NU RatingDocument2 pagesNATO Cyber Security Centre Bulletin: PAN/NU RatingCristian Gilberto Garcia BautistaNo ratings yet
- Rca TV Users Manual l26wd21 16510760 - Ib - E-07Document36 pagesRca TV Users Manual l26wd21 16510760 - Ib - E-07kt35No ratings yet
- Acc 3001Document91 pagesAcc 3001AidynNo ratings yet
- RF Diversity and 1.2 GHZ Bandwidth Observation Receiver: Data SheetDocument138 pagesRF Diversity and 1.2 GHZ Bandwidth Observation Receiver: Data Sheet넹넹No ratings yet
- ParadiseModem ManualDocument369 pagesParadiseModem Manualhendpraz88No ratings yet
- Interview Questions For CommunicationDocument2 pagesInterview Questions For CommunicationRaja SekharNo ratings yet
- CS2045 Wireless Networks QADocument27 pagesCS2045 Wireless Networks QAGayathri MNo ratings yet
- Essentials Gen4 2MP IP Bullet: Data SheetDocument3 pagesEssentials Gen4 2MP IP Bullet: Data SheetunstrainNo ratings yet
- Starter Activity Digi Tech Year 10 PresentationDocument24 pagesStarter Activity Digi Tech Year 10 Presentationevdokiiatolluman77No ratings yet
- Lect10 - Receiver Noise and BERDocument12 pagesLect10 - Receiver Noise and BERARCHIT SUNDLINo ratings yet
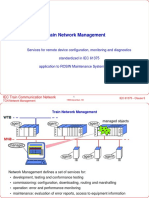
- Iec61375 5 TNMDocument27 pagesIec61375 5 TNMVaibhav DhinganiNo ratings yet
- NATO Consultation Command and Control Agency (NC3A)Document18 pagesNATO Consultation Command and Control Agency (NC3A)GenolettNo ratings yet
- Sigmadsp 28-/56-Bit Audio Processor With Two Adcs and Four Dacs Adau1701Document56 pagesSigmadsp 28-/56-Bit Audio Processor With Two Adcs and Four Dacs Adau1701Anthony HubbardNo ratings yet
- Es Ses Uas CiscoDocument46 pagesEs Ses Uas CiscoRajeev Mohan VermaNo ratings yet
- Internet Control Message Protocol (ICMP) : Group - 4Document13 pagesInternet Control Message Protocol (ICMP) : Group - 4RUKNUDDIN ASRARINo ratings yet
- RailnetDocument55 pagesRailnetHarshit DhakadNo ratings yet
- Mobile BankingDocument11 pagesMobile Bankingsuresh aNo ratings yet
- Critical Parameters of 2G 3G 4GDocument28 pagesCritical Parameters of 2G 3G 4GManish Kumar PandeyNo ratings yet
- Exercises For Chapter 11:: SecurityDocument12 pagesExercises For Chapter 11:: SecurityAurusNo ratings yet
- BRKDCT 3101 PDFDocument202 pagesBRKDCT 3101 PDFprakashrjsekarNo ratings yet
- RapidFIRE Goggle Module Manual en v0.9Document18 pagesRapidFIRE Goggle Module Manual en v0.9aeroseb1No ratings yet
- Experiment No.: 2: AIM: To Perform Encoding and Decoding For Hamming Code. APPARATUS: Scilab. TheoryDocument4 pagesExperiment No.: 2: AIM: To Perform Encoding and Decoding For Hamming Code. APPARATUS: Scilab. TheoryAnonymous fcVxWyENo ratings yet
- SHDSL Cable Testing Using WeconfigDocument14 pagesSHDSL Cable Testing Using WeconfiglastwolfNo ratings yet