You might also like
- Stickman Towards A Human Scale Acrobatic Robot PaperDocument7 pagesStickman Towards A Human Scale Acrobatic Robot PaperstevecraigNo ratings yet
- A Survey of Bio-Inspired Compliant Legged Robot Designs: Home Search Collections Journals About Contact Us My IopscienceDocument21 pagesA Survey of Bio-Inspired Compliant Legged Robot Designs: Home Search Collections Journals About Contact Us My IopscienceRovi Andra PradivaNo ratings yet
- 17 - Adaptive Control of Inertially Actuated Bouncing Robot (Important!)Document11 pages17 - Adaptive Control of Inertially Actuated Bouncing Robot (Important!)jowdiverNo ratings yet
- 15 - A Locust-Inspired Miniature Jumping Robot (Taub)Document6 pages15 - A Locust-Inspired Miniature Jumping Robot (Taub)jowdiverNo ratings yet
- Stair Climbing Robots and High-Grip CrawlerDocument23 pagesStair Climbing Robots and High-Grip Crawlermont21No ratings yet
- Representation-Free Model Predictive Control For Dynamic Motions in QuadrupedsDocument18 pagesRepresentation-Free Model Predictive Control For Dynamic Motions in Quadrupeds이재봉No ratings yet
- Int Conf Paper 4Document8 pagesInt Conf Paper 4Ion TomitaNo ratings yet
- Connected Crawler Robot - Design and Motion Planning For Climbing A StepDocument15 pagesConnected Crawler Robot - Design and Motion Planning For Climbing A Stepsunil1237No ratings yet
- A Control Architecture For Quadruped Locomotion Over Rough TerrainDocument8 pagesA Control Architecture For Quadruped Locomotion Over Rough TerrainsigmateNo ratings yet
- An Overview of Legged Robots: J. A. Tenreiro Machado and Manuel F. SilvaDocument38 pagesAn Overview of Legged Robots: J. A. Tenreiro Machado and Manuel F. SilvaMahdi_Karbalai_7735No ratings yet
- MIT Super Mini Cheetah Robot: Small, Low-Cost Quadruped for Dynamic LocomotionDocument8 pagesMIT Super Mini Cheetah Robot: Small, Low-Cost Quadruped for Dynamic LocomotionCuenta De RespaldoNo ratings yet
- Robust Locomotion for Biped Humanoid RobotsDocument11 pagesRobust Locomotion for Biped Humanoid RobotsbishNo ratings yet
- 9 - Inertially Actuated Baton LocomotorDocument9 pages9 - Inertially Actuated Baton LocomotorjowdiverNo ratings yet
- Paper 2Document18 pagesPaper 2Momtaz AbadirNo ratings yet
- A Novel Design of Tri-Star Wheeled Mobile Robot For High Obstacle ClimbingDocument6 pagesA Novel Design of Tri-Star Wheeled Mobile Robot For High Obstacle ClimbingRaulValleMezaNo ratings yet
- Seminar Group 14Document22 pagesSeminar Group 14Mohith M NaIrNo ratings yet
- Ircse12 Submission 21Document10 pagesIrcse12 Submission 21Doroftei Ioan AlexandruNo ratings yet
- Biped Robot Walking Control on Uneven and Sloped SurfacesDocument32 pagesBiped Robot Walking Control on Uneven and Sloped SurfacesAwais NaeemNo ratings yet
- كرسي متسلق السلالمDocument6 pagesكرسي متسلق السلالمAhmed ShoeebNo ratings yet
- On A Bio-Inspired Amphibious Robot Capable of Multimodal MotionDocument10 pagesOn A Bio-Inspired Amphibious Robot Capable of Multimodal Motionnikhil210492No ratings yet
- Alternative Gaits For Multiped Robots With Leg Failures To Retain ManeuverabilityDocument8 pagesAlternative Gaits For Multiped Robots With Leg Failures To Retain ManeuverabilityralfvandoormaalNo ratings yet
- Trajectory Planning and Control of One-Legged Hopping Robot at Thrusting PhaseDocument8 pagesTrajectory Planning and Control of One-Legged Hopping Robot at Thrusting PhaseAlina MirelaNo ratings yet
- Amphibious Robot II PDFDocument6 pagesAmphibious Robot II PDFAman TripathiNo ratings yet
- Walking Control Algorithm of Biped Humanoid Robot On Uneven and Inclined FloorDocument32 pagesWalking Control Algorithm of Biped Humanoid Robot On Uneven and Inclined FloorDiego Fonseca ViannaNo ratings yet
- Unsupported Monopedal Hopping Outdoors: Justin K. Yim, Eric K. Wang, and Ronald S. FearingDocument2 pagesUnsupported Monopedal Hopping Outdoors: Justin K. Yim, Eric K. Wang, and Ronald S. Fearingbula69No ratings yet
- 5 - Jumping Robots A Biomimetic Solution To Locomotion Across Rough TerrainDocument19 pages5 - Jumping Robots A Biomimetic Solution To Locomotion Across Rough TerrainjowdiverNo ratings yet
- Multilegged Robot Locomotion GuideDocument29 pagesMultilegged Robot Locomotion GuidekuldeepNo ratings yet
- Report 5Document11 pagesReport 5sp9719307No ratings yet
- Design and Experimental Evaluation of The Hydraulically Actuated Prototype Leg of The Hyq RobotDocument6 pagesDesign and Experimental Evaluation of The Hydraulically Actuated Prototype Leg of The Hyq RobotМатвей КузнецовNo ratings yet
- A Dynamically Stable Single-Wheeled Mobile Robot With Inverse Mouse-Ball DriveDocument6 pagesA Dynamically Stable Single-Wheeled Mobile Robot With Inverse Mouse-Ball Driver9hinoNo ratings yet
- Robot LocomotionDocument9 pagesRobot Locomotionnigel989No ratings yet
- Jeong 2008Document8 pagesJeong 2008Laila AzzouziNo ratings yet
- Harib 2017Document7 pagesHarib 2017dan_intel6735No ratings yet
- Kim Jung Yup 2007Document28 pagesKim Jung Yup 2007Jordy LiuNo ratings yet
- An Innovative Space Rover With Extended Climbing AbilitiesDocument7 pagesAn Innovative Space Rover With Extended Climbing AbilitiesEdwin Alvarez GutierrezNo ratings yet
- Biped Landing Pattern Modification Method With Nonlinear Compliance ControlDocument6 pagesBiped Landing Pattern Modification Method With Nonlinear Compliance ControlHaider NeamaNo ratings yet
- 3D CAD Design of 3 Arm Articulated RobotDocument49 pages3D CAD Design of 3 Arm Articulated RobotWebsoft Tech-HydNo ratings yet
- Sang Wan 2009Document11 pagesSang Wan 2009李默然No ratings yet
- Learning To Walk in 20 Minutes: Russt@csail - Mit.edu Resa@berkeley - Edu Seung@mit - EduDocument6 pagesLearning To Walk in 20 Minutes: Russt@csail - Mit.edu Resa@berkeley - Edu Seung@mit - EduTaylan Utku MertNo ratings yet
- Dynamic Torque Control of A Hydraulic Quadruped RobotDocument6 pagesDynamic Torque Control of A Hydraulic Quadruped RobotPrathamesh SarafNo ratings yet
- Micromachines 13 01404 v2Document20 pagesMicromachines 13 01404 v2technologie collegeNo ratings yet
- Robots ScienceDocument14 pagesRobots ScienceJ Elver SilvaNo ratings yet
- Basic Running Test of The Cylindrical Tracked Vehicle With Sideways MobilityDocument7 pagesBasic Running Test of The Cylindrical Tracked Vehicle With Sideways Mobilityjazari technoNo ratings yet
- Passive Dynamic Walking: Tad McgeerDocument21 pagesPassive Dynamic Walking: Tad Mcgeeranushk9rNo ratings yet
- Reduced Converted Implementation of A Hierarchical Controller On The MIT CheetahDocument26 pagesReduced Converted Implementation of A Hierarchical Controller On The MIT CheetahBRUNO ALEXIS ALCANTARA TACORANo ratings yet
- Stability Controller Atlas Robot ExampleDocument6 pagesStability Controller Atlas Robot ExampleIvan PasterNo ratings yet
- Jumping XivDocument10 pagesJumping XivNikmah MhNo ratings yet
- Design of A Leg-Wheel Hybrid Mobile Platform: November 2009Document7 pagesDesign of A Leg-Wheel Hybrid Mobile Platform: November 2009Anonymous 2pYDDwtSkcNo ratings yet
- AQUA An Amphibious Autonomous RobotDocument10 pagesAQUA An Amphibious Autonomous RobotlingbazhixingNo ratings yet
- Compensatory Motion Control For A Biped Walking RobotDocument11 pagesCompensatory Motion Control For A Biped Walking Robotfreiheit137174No ratings yet
- Centrifugal Force Compensation of A Two-Wheeled Balancing RobotDocument6 pagesCentrifugal Force Compensation of A Two-Wheeled Balancing RobotAs'ad Syamsul ArifinNo ratings yet
- 10 - A Spherical Hopping Robot For Exploration in Complex EnvironmentsDocument6 pages10 - A Spherical Hopping Robot For Exploration in Complex EnvironmentsjowdiverNo ratings yet
- Inverse Kinematics Analysis For Motion Prediction of A Hexapod RobotDocument5 pagesInverse Kinematics Analysis For Motion Prediction of A Hexapod Robotdidi sronggotNo ratings yet
- Dynamically Stable Gait Planning For A Humanoid Robot To Climb Sloping SurfaceDocument6 pagesDynamically Stable Gait Planning For A Humanoid Robot To Climb Sloping SurfaceAkhtaruzzaman AkhterNo ratings yet
- Dynamic Control of The 6WD Skid-Steering Mobile Robot RobuROC6Document6 pagesDynamic Control of The 6WD Skid-Steering Mobile Robot RobuROC6cticusorNo ratings yet
- Space Robotics Seminar Report 2018Document30 pagesSpace Robotics Seminar Report 2018clash with ykNo ratings yet
- Modeling and Experimental Evaluation of An Improved Amphibious Robot With Compact StructureDocument16 pagesModeling and Experimental Evaluation of An Improved Amphibious Robot With Compact StructureRicardo Sebastian Ricardo RanillaNo ratings yet
- 4 - Minimalist Jumping Robots For Celestial ExplorationDocument22 pages4 - Minimalist Jumping Robots For Celestial ExplorationjowdiverNo ratings yet
- Google DeepMind Health - Independent Reviewers Report 2018Document28 pagesGoogle DeepMind Health - Independent Reviewers Report 2018Gina SmithNo ratings yet
- Future of AI and Humanity (Pew Research Center)Document123 pagesFuture of AI and Humanity (Pew Research Center)Gina SmithNo ratings yet
- Using Tononi Phi To Measure Consciousness of A Cognitive System While Reading and ConversingDocument6 pagesUsing Tononi Phi To Measure Consciousness of A Cognitive System While Reading and ConversingGina SmithNo ratings yet
- Enhancement of EAP Actuated Facial Expressions by Designed Chamber Geometry in Elastomers (Hanson, Et Al)Document9 pagesEnhancement of EAP Actuated Facial Expressions by Designed Chamber Geometry in Elastomers (Hanson, Et Al)Gina SmithNo ratings yet
- Design of Android Type Humanoid Robot Albert HUBO: Jun-Ho Oh David Hanson Il Young Han Jung-Yup Kim Ill-Woo ParkDocument6 pagesDesign of Android Type Humanoid Robot Albert HUBO: Jun-Ho Oh David Hanson Il Young Han Jung-Yup Kim Ill-Woo ParkGina SmithNo ratings yet
- HEFES: An Hybrid Engine For Facial Expressions Synthesis .. (Mazzei, Hanson, Et Al)Document6 pagesHEFES: An Hybrid Engine For Facial Expressions Synthesis .. (Mazzei, Hanson, Et Al)Gina SmithNo ratings yet
- Truly Social Robots: Understanding Human-Robot Interaction (Ullrich, Diefenbach)Document7 pagesTruly Social Robots: Understanding Human-Robot Interaction (Ullrich, Diefenbach)Gina SmithNo ratings yet
- RoDiCA: A Human-Robot Interaction System For Treatment of Childhood Autism Spectrum Disorders (Ranatunga, Et Al)Document6 pagesRoDiCA: A Human-Robot Interaction System For Treatment of Childhood Autism Spectrum Disorders (Ranatunga, Et Al)Gina SmithNo ratings yet
- Overcoming The Uncanny Valley: Emotions Reduce Uncanniness of Humanlike Robots (Koshate, Et Al)Document7 pagesOvercoming The Uncanny Valley: Emotions Reduce Uncanniness of Humanlike Robots (Koshate, Et Al)Gina SmithNo ratings yet
- ASD and Hanson Robotics' ZENO Robot: An Emotion Recognition Study (Salvador, Et Al)Document6 pagesASD and Hanson Robotics' ZENO Robot: An Emotion Recognition Study (Salvador, Et Al)Gina SmithNo ratings yet
- Towards Retro-Projected Robot Faces: An Alternative To Mechatronic and Android FacesDocument6 pagesTowards Retro-Projected Robot Faces: An Alternative To Mechatronic and Android FacesGina SmithNo ratings yet
- Design of Android Type Humanoid Robot Albert HUBO: Jun-Ho Oh David Hanson Il Young Han Jung-Yup Kim Ill-Woo ParkDocument6 pagesDesign of Android Type Humanoid Robot Albert HUBO: Jun-Ho Oh David Hanson Il Young Han Jung-Yup Kim Ill-Woo ParkGina SmithNo ratings yet
- Loving AI: Humanoid Robots As Agents of Human Consciousness ExpansionDocument16 pagesLoving AI: Humanoid Robots As Agents of Human Consciousness ExpansionGina SmithNo ratings yet
- Machine Learning of Toxicological Big Data Enables Read-Across Structure Activity Relationships (RASAR) Outperforming Animal Test ReproducibilityDocument15 pagesMachine Learning of Toxicological Big Data Enables Read-Across Structure Activity Relationships (RASAR) Outperforming Animal Test ReproducibilityGina SmithNo ratings yet
- Artificial SocietiesDocument10 pagesArtificial SocietiesGina SmithNo ratings yet
- US Attorney General Jeff Sessions' Jan. 4 Memo To Reverse Legal WeedDocument1 pageUS Attorney General Jeff Sessions' Jan. 4 Memo To Reverse Legal WeedGina SmithNo ratings yet
- US Patent 7,113,848 B2: Human Emulation Robot SystemDocument33 pagesUS Patent 7,113,848 B2: Human Emulation Robot SystemGina SmithNo ratings yet
- Shifting and Drfifting Attention While Reading: A Case Study of Nonlinear Dynamical Attention Allocation in The OpenCog Cognitive ArchitectureDocument5 pagesShifting and Drfifting Attention While Reading: A Case Study of Nonlinear Dynamical Attention Allocation in The OpenCog Cognitive ArchitectureGina SmithNo ratings yet
- MeltdownDocument16 pagesMeltdownAli HasanNo ratings yet
- Upending The Uncanny ValleyDocument8 pagesUpending The Uncanny ValleyGina Smith100% (1)
- Realistic Humanlike Robots For Treatment of ASD, Social Training and Research (2012 Paper)Document7 pagesRealistic Humanlike Robots For Treatment of ASD, Social Training and Research (2012 Paper)Gina SmithNo ratings yet
- Hanson Robotics Limited Press KitDocument11 pagesHanson Robotics Limited Press KitGina SmithNo ratings yet
- AI Report To UK House of LordsDocument8 pagesAI Report To UK House of LordsGina SmithNo ratings yet
- Tohoku University Researchers Say Damaged Brittle Star-Shaped Robots Will Heal ThemselvesDocument14 pagesTohoku University Researchers Say Damaged Brittle Star-Shaped Robots Will Heal ThemselvesGina SmithNo ratings yet
- Using Hawkeye From The Avengers To Communicate On The EyeDocument9 pagesUsing Hawkeye From The Avengers To Communicate On The EyeGina SmithNo ratings yet
- CSIS - 2014-Sustaining Us Lead in UnmannedSystems - Web PDFDocument28 pagesCSIS - 2014-Sustaining Us Lead in UnmannedSystems - Web PDFGina SmithNo ratings yet
- Responsible Robotics Conference 2018Document3 pagesResponsible Robotics Conference 2018Gina SmithNo ratings yet
- CSIS - 2014-Sustaining Us Lead in UnmannedSystems - Web PDFDocument28 pagesCSIS - 2014-Sustaining Us Lead in UnmannedSystems - Web PDFGina SmithNo ratings yet
- Cole Memo 2013Document4 pagesCole Memo 2013stevennelson10No ratings yet
- APO Time Resolved Color Photometry of 1I/ OUMUAMUADocument12 pagesAPO Time Resolved Color Photometry of 1I/ OUMUAMUAGina SmithNo ratings yet
- Structure-First YearDocument12 pagesStructure-First Yearioemk251No ratings yet
- Linear Programming: Presented by - Meenakshi TripathiDocument13 pagesLinear Programming: Presented by - Meenakshi TripathiRajendra PansareNo ratings yet
- BKI Vol2 - Section38Document5 pagesBKI Vol2 - Section38Erwin Paulian SihombingNo ratings yet
- Physics Ia FinalDocument11 pagesPhysics Ia FinalscarletNo ratings yet
- Product Note PD30 en RevA 2011 Anti-Sway Control ProgramDocument2 pagesProduct Note PD30 en RevA 2011 Anti-Sway Control ProgramkumarNo ratings yet
- Roller Coaster Physics Coursework GcseDocument7 pagesRoller Coaster Physics Coursework Gcseafjwdbaekycbaa100% (2)
- Karthik Vickraman: Work ExperienceDocument1 pageKarthik Vickraman: Work ExperienceVishaal KannaNo ratings yet
- Program in Mathcad to Thin Rectangular PlatesDocument12 pagesProgram in Mathcad to Thin Rectangular PlatesPedro Luis Garcia VillegasNo ratings yet
- Effect of Degassing and Heat Treatment OnDocument9 pagesEffect of Degassing and Heat Treatment OnSinan YıldızNo ratings yet
- Programming ExercisesDocument2 pagesProgramming ExercisesDaryl Ivan Empuerto HisolaNo ratings yet
- Causarin Act.3 Psychology 9.14-9.20Document2 pagesCausarin Act.3 Psychology 9.14-9.20Denise CausarinNo ratings yet
- THF Oxidation With Calcium HypochloriteDocument3 pagesTHF Oxidation With Calcium HypochloriteSmokeNo ratings yet
- The Evolution of Consciousness According to Bhagavad-GitaDocument14 pagesThe Evolution of Consciousness According to Bhagavad-Gitatrabajo mpdNo ratings yet
- Backdraft Response StrategiesDocument6 pagesBackdraft Response StrategiesShan RaffelNo ratings yet
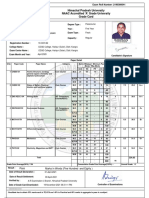
- Serial Number:1920110212668 Exam Roll Number Grade CardDocument2 pagesSerial Number:1920110212668 Exam Roll Number Grade Cardsimran vaidNo ratings yet
- Li 2017 IOP Conf. Ser. Mater. Sci. Eng. 232 012084Document10 pagesLi 2017 IOP Conf. Ser. Mater. Sci. Eng. 232 012084Yu An ShihNo ratings yet
- Venn Diagram Generator Academo - Org - Free, Interactive, EducationDocument1 pageVenn Diagram Generator Academo - Org - Free, Interactive, EducationChris DeBruyckereNo ratings yet
- Homework 1Document6 pagesHomework 1Ahmet Kemal ÇetinNo ratings yet
- Building Constraction 2Document22 pagesBuilding Constraction 2Abdala M KreemNo ratings yet
- Nitric Acid - Nitrous Acid - Nitrogen Oxides - Ullman's EncyclopediaDocument49 pagesNitric Acid - Nitrous Acid - Nitrogen Oxides - Ullman's Encyclopediapoly6icsNo ratings yet
- Cat14 KDN EngDocument76 pagesCat14 KDN EngFederico LiaudatNo ratings yet
- Horizontal Twin-Shaft Paddle Mixers - The Ultimate in Mixing TechnologyDocument5 pagesHorizontal Twin-Shaft Paddle Mixers - The Ultimate in Mixing TechnologyMilling and Grain magazineNo ratings yet
- Dost Jls S PrimerDocument17 pagesDost Jls S PrimerShaunrey SalimbagatNo ratings yet
- RFID OverviewDocument7 pagesRFID Overviewfelis132No ratings yet
- Layers of The EarthDocument105 pagesLayers of The Earthbradbader100% (11)
- Analysis of Buckling of Piles Fully Embedded in Ground According To Finite Element MethodDocument5 pagesAnalysis of Buckling of Piles Fully Embedded in Ground According To Finite Element Methodctlim88No ratings yet
- Sample Questions For Practice Fiber LengthDocument0 pagesSample Questions For Practice Fiber LengthShailendra Mishra100% (4)
- Beam StandardDocument44 pagesBeam StandardweldmindNo ratings yet
- FLSmidth CrossBar Cooler v2Document8 pagesFLSmidth CrossBar Cooler v2Mohammed AbdoNo ratings yet
- Navier-Stokes Simulations of Projectile Base Flow with and without BleedDocument42 pagesNavier-Stokes Simulations of Projectile Base Flow with and without BleednanocardosoNo ratings yet