You might also like
- 0185-1098-E 1V102 MA Tutorial LinMot DesignerDocument39 pages0185-1098-E 1V102 MA Tutorial LinMot DesignerTesfaye Utopia UtopiaNo ratings yet
- A Non-Isolated Onboard Charger For Electric VehicleDocument6 pagesA Non-Isolated Onboard Charger For Electric VehicleTesfaye Utopia UtopiaNo ratings yet
- Lecture4 2017Document37 pagesLecture4 2017Tesfaye Utopia UtopiaNo ratings yet
- Interference Fits and KeysDocument38 pagesInterference Fits and KeysTesfaye Utopia UtopiaNo ratings yet
- Synchronous Machines by DR Adel GastliDocument18 pagesSynchronous Machines by DR Adel GastliTesfaye Utopia UtopiaNo ratings yet
- International Press ReleaseDocument6 pagesInternational Press ReleaseTesfaye Utopia UtopiaNo ratings yet
- 96f4710c33a97fd EkDocument5 pages96f4710c33a97fd EkTesfaye Utopia UtopiaNo ratings yet
- Applying DC Motors in Linear Motion ApplicationsDocument12 pagesApplying DC Motors in Linear Motion ApplicationsTesfaye Utopia UtopiaNo ratings yet
- DatasheetDocument31 pagesDatasheetTesfaye Utopia UtopiaNo ratings yet
- LM1084 5-A Low Dropout Positive Regulators: 1 Features 3 DescriptionDocument29 pagesLM1084 5-A Low Dropout Positive Regulators: 1 Features 3 DescriptionEdson PereiraNo ratings yet
- Lecture 3 - Cartesian Stress and Stress TransformationDocument18 pagesLecture 3 - Cartesian Stress and Stress TransformationTesfaye Utopia UtopiaNo ratings yet
- DatasheetDocument23 pagesDatasheetTesfaye Utopia UtopiaNo ratings yet
- FULLTEXT01Document72 pagesFULLTEXT01Tesfaye Utopia UtopiaNo ratings yet
- Assignment 1Document3 pagesAssignment 1Tesfaye Utopia UtopiaNo ratings yet
- DatasheetDocument30 pagesDatasheetTesfaye Utopia UtopiaNo ratings yet
- 61LV25616ALDocument12 pages61LV25616ALTesfaye Utopia UtopiaNo ratings yet
- How To Write A Book ReviewDocument6 pagesHow To Write A Book ReviewNuzul ImranNo ratings yet
- Param FileDocument1 pageParam FileTesfaye Utopia UtopiaNo ratings yet
- Industrial InstrumentationWeek4Document3 pagesIndustrial InstrumentationWeek4Tesfaye Utopia UtopiaNo ratings yet
- Industrial InstrumentationWeek7Document3 pagesIndustrial InstrumentationWeek7Tesfaye Utopia UtopiaNo ratings yet
- C28X Iqmath Library: A Virtual Floating Point Engine V1.5 July 8, 2008Document72 pagesC28X Iqmath Library: A Virtual Floating Point Engine V1.5 July 8, 2008Tesfaye Utopia UtopiaNo ratings yet
- Industrial InstrumentationWeek5Document3 pagesIndustrial InstrumentationWeek5Tesfaye Utopia UtopiaNo ratings yet
- Industrial InstrumentationWeek3Document5 pagesIndustrial InstrumentationWeek3Tesfaye Utopia UtopiaNo ratings yet
- 24LC16BDocument40 pages24LC16BelqrqNo ratings yet
- Industrial InstrumentationWeek6Document6 pagesIndustrial InstrumentationWeek6Tesfaye Utopia UtopiaNo ratings yet
- Industrial InstrumentationWeek1Document4 pagesIndustrial InstrumentationWeek1Tesfaye Utopia UtopiaNo ratings yet
- Param FileDocument1 pageParam FileTesfaye Utopia UtopiaNo ratings yet
- Untitled 1Document2 pagesUntitled 1Tesfaye Utopia UtopiaNo ratings yet
- Industrial InstrumentationWeek2Document5 pagesIndustrial InstrumentationWeek2Tesfaye Utopia UtopiaNo ratings yet
- 2020 Scholarship FormDocument3 pages2020 Scholarship FormTesfaye Utopia UtopiaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Tailings Dam Breach ModelingDocument126 pagesTailings Dam Breach ModelingFranco VillacortaNo ratings yet
- Verifying Newton's Second Law of MotionDocument21 pagesVerifying Newton's Second Law of MotionFatin Nabihah Jamil100% (1)
- IR Spectroscopy Identification GuideDocument28 pagesIR Spectroscopy Identification GuideAby JatNo ratings yet
- Structure of The Scientific TheoriesDocument33 pagesStructure of The Scientific TheoriesMhmmd AbdNo ratings yet
- Iso 5048 en PDFDocument6 pagesIso 5048 en PDFnaser shamsNo ratings yet
- Crossed-Field Tubes (M-Type Tubes)Document24 pagesCrossed-Field Tubes (M-Type Tubes)Beverly PamanNo ratings yet
- Circular Motion Principles For SatellitesDocument3 pagesCircular Motion Principles For Satellitesmani420420No ratings yet
- Rotary Inverted PendulumDocument8 pagesRotary Inverted PendulumEduardo BittencourtNo ratings yet
- IB Waves Objectives in WordDocument3 pagesIB Waves Objectives in WordAMITAV JENANo ratings yet
- Chapter 1 Introduction To Thermodynamics and Heat Transfer PDFDocument30 pagesChapter 1 Introduction To Thermodynamics and Heat Transfer PDFJacksparraowNo ratings yet
- Effective Mass of An Oscillating Spring: Eduardo E. Rodríguez, Gabriel A. GesnouinDocument4 pagesEffective Mass of An Oscillating Spring: Eduardo E. Rodríguez, Gabriel A. GesnouinEudomar HenriquezNo ratings yet
- Laminar Flow Through Circular PipesDocument26 pagesLaminar Flow Through Circular PipesSunil BagadeNo ratings yet
- Heat Transfer BookDocument2 pagesHeat Transfer BookPrashanth ChNo ratings yet
- Are Tier Building Column SplicesDocument2 pagesAre Tier Building Column SplicesKarthi SriNo ratings yet
- SOLIDWORKS Simulation 2018 A Power Guide For Beginners and Intermediate Users by Willis, John Dogra, Sandeep CADArtifexDocument313 pagesSOLIDWORKS Simulation 2018 A Power Guide For Beginners and Intermediate Users by Willis, John Dogra, Sandeep CADArtifexmrcNo ratings yet
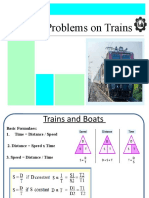
- Trains and Boats FinalDocument52 pagesTrains and Boats FinalSurya AnjuNo ratings yet
- TP Heat Exchanger HT31Document4 pagesTP Heat Exchanger HT31abdel100% (1)
- 2020 M.F.Alwalan - Analytical Models of Impact Force-Time Response Generated From High StrainDocument14 pages2020 M.F.Alwalan - Analytical Models of Impact Force-Time Response Generated From High StrainlbiNo ratings yet
- Push-Over Analysis of The Seismic Behavior of A Concrete-Filled Rectangular Tubular Frame StructureDocument7 pagesPush-Over Analysis of The Seismic Behavior of A Concrete-Filled Rectangular Tubular Frame Structureyuni auliaNo ratings yet
- Roro Ramp CalDocument2 pagesRoro Ramp CalBoyNo ratings yet
- HW 6 PDFDocument4 pagesHW 6 PDFAjinkya DeshpandeNo ratings yet
- 1.1 General: Means So Much Affected As Those Whose Foundations Did Not Reach The Bottom of The Soil"Document54 pages1.1 General: Means So Much Affected As Those Whose Foundations Did Not Reach The Bottom of The Soil"Sai GnanadeepNo ratings yet
- Progress Report Week#9 UlubeluDocument6 pagesProgress Report Week#9 UlubelutiantaufikNo ratings yet
- Leak Down TestingDocument15 pagesLeak Down TestingWilson ClaveriaNo ratings yet
- KAU Physics Lab Determines GravityDocument5 pagesKAU Physics Lab Determines GravityFaris AlbogamiNo ratings yet
- HT5 ReportDocument17 pagesHT5 ReportTing Kee ChuongNo ratings yet
- Comparative Analysis of A Tall Structure PDFDocument8 pagesComparative Analysis of A Tall Structure PDFHugo MeloNo ratings yet
- First Year Phyiscs Ipe Imp Q.bank 2020-2021 - (Hyderad Centres)Document26 pagesFirst Year Phyiscs Ipe Imp Q.bank 2020-2021 - (Hyderad Centres)Varun Sai SundalamNo ratings yet
- KInatics Theory and Atom and Nuclie MMDocument1 pageKInatics Theory and Atom and Nuclie MMSanjay GuptaNo ratings yet