You might also like
- Buku Informasi Sistem Starter Dan PengisianDocument37 pagesBuku Informasi Sistem Starter Dan PengisianDaniel Karya Teknik SteelNo ratings yet
- Jadwal Rs Ibnu SinaDocument6 pagesJadwal Rs Ibnu SinaMohammad Shohib Tri PambudiNo ratings yet
- Presentasi Lele BioflokDocument14 pagesPresentasi Lele BioflokMohammad Shohib Tri PambudiNo ratings yet
- ISO9001Document24 pagesISO9001Mohammad Shohib Tri PambudiNo ratings yet
- Motor StaterDocument2 pagesMotor StaterMohammad Shohib Tri PambudiNo ratings yet
- Soal Dasar Kelistrikan X AllDocument8 pagesSoal Dasar Kelistrikan X AllMohammad Shohib Tri PambudiNo ratings yet
- Firman Budal NG NepalDocument6 pagesFirman Budal NG NepalMohammad Shohib Tri PambudiNo ratings yet
- Buku Informasi Sistem Starter Dan PengisianDocument37 pagesBuku Informasi Sistem Starter Dan PengisianDaniel Karya Teknik SteelNo ratings yet
- Sagala. Cici Elisabet H2007 AbstractDocument10 pagesSagala. Cici Elisabet H2007 AbstractMohammad Shohib Tri PambudiNo ratings yet
- Alat ListrikDocument1 pageAlat ListrikMohammad Shohib Tri PambudiNo ratings yet
- Kuiz CPK 2 Rantai Pasok 2018Document2 pagesKuiz CPK 2 Rantai Pasok 2018Mohammad Shohib Tri Pambudi100% (1)
- Dulu AgamaDocument3 pagesDulu AgamaMohammad Shohib Tri PambudiNo ratings yet
- 0 Pendahuluan 2018Document7 pages0 Pendahuluan 2018Mohammad Shohib Tri PambudiNo ratings yet
- Sistem Bahan Bakar Pada Mesin BensinDocument6 pagesSistem Bahan Bakar Pada Mesin BensinMohammad Shohib Tri PambudiNo ratings yet
- Proposal Penyuluhan BNN Dan Dinas KesehatanDocument6 pagesProposal Penyuluhan BNN Dan Dinas KesehatanblackNo ratings yet
- Surat Keterangan Pengurus MasjidDocument1 pageSurat Keterangan Pengurus Masjidbambang.suk100% (1)
- Pengumuman Tahap 2 SGDocument31 pagesPengumuman Tahap 2 SGSeptyadi David Eka AryunggaNo ratings yet
- Dulu AgamaDocument3 pagesDulu AgamaMohammad Shohib Tri PambudiNo ratings yet
- Memahami Dan Menulis Paragraf 11Document20 pagesMemahami Dan Menulis Paragraf 11Mohammad Shohib Tri PambudiNo ratings yet
- Bisnis Tahu Sehat OrganikDocument10 pagesBisnis Tahu Sehat OrganikMohammad Shohib Tri PambudiNo ratings yet
- Multi MeterDocument4 pagesMulti MeterMohammad Shohib Tri PambudiNo ratings yet
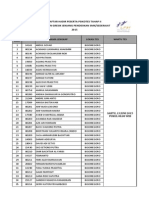
- Penerima BMP Angakatan IVDocument3 pagesPenerima BMP Angakatan IVMohammad Shohib Tri PambudiNo ratings yet
- Dulu AgamaDocument3 pagesDulu AgamaMohammad Shohib Tri PambudiNo ratings yet
- BiayakuliahDocument1 pageBiayakuliahMohammad Shohib Tri PambudiNo ratings yet
- 3 - Sistem Akumulasi Biaya PDFDocument3 pages3 - Sistem Akumulasi Biaya PDFMohammad Shohib Tri PambudiNo ratings yet
- SRT Tarik TambangDocument1 pageSRT Tarik TambangMohammad Shohib Tri PambudiNo ratings yet
- Makalah Performance TestDocument13 pagesMakalah Performance TestAnzaNo ratings yet
- Makalah Performance TestDocument13 pagesMakalah Performance TestAnzaNo ratings yet
- Silakan Di Kunjungi....... !!!Document1 pageSilakan Di Kunjungi....... !!!Mohammad Shohib Tri PambudiNo ratings yet