You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The ISM Code and The ISPS CodeDocument20 pagesThe ISM Code and The ISPS CodeEge SertNo ratings yet
- SDS UltraSnap US en 1 - 0Document14 pagesSDS UltraSnap US en 1 - 0IG ChannelNo ratings yet
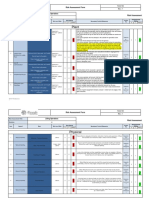
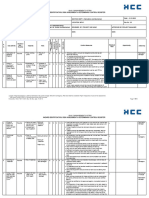
- Lifting Risk AssessmentDocument5 pagesLifting Risk AssessmentimranNo ratings yet
- TPM Pillars & Improvement RoutesDocument76 pagesTPM Pillars & Improvement RoutesYen NguyenNo ratings yet
- 4621 NYI Exam BlueprintDocument4 pages4621 NYI Exam BlueprintjelenabasaNo ratings yet
- Safety culture assessment tools for improving healthcareDocument7 pagesSafety culture assessment tools for improving healthcareVeigner Whyng CabugayanNo ratings yet
- C 561Document2 pagesC 561Asep TheaNo ratings yet
- User Instructions: WorthingtonDocument52 pagesUser Instructions: WorthingtonArielNo ratings yet
- Nuclear Safety-Related Instrument-Sensing Line Piping and Tubing Standard For Use in Nuclear Power PlantsDocument44 pagesNuclear Safety-Related Instrument-Sensing Line Piping and Tubing Standard For Use in Nuclear Power PlantsKrishNo ratings yet
- Lloyds - Code For Lifting Appliances in Marine Environmen - Notice2 - July - 2016Document12 pagesLloyds - Code For Lifting Appliances in Marine Environmen - Notice2 - July - 2016Ahmed AliNo ratings yet
- Safety Data Sheet Sodium CarbonateDocument11 pagesSafety Data Sheet Sodium Carbonateمحمد صبحيNo ratings yet
- Stoddard Spirits Solvents (Minerals, Aliphatic Petroleum Distillation, White Spirits) 8052-41-3Document4 pagesStoddard Spirits Solvents (Minerals, Aliphatic Petroleum Distillation, White Spirits) 8052-41-3Awaludin.No ratings yet
- Msds CPD Intraplast N UsDocument10 pagesMsds CPD Intraplast N UsJose David CastroNo ratings yet
- Engineer / Supervisor: Skills RequiredDocument2 pagesEngineer / Supervisor: Skills RequiredAbid HussainNo ratings yet
- AL QOOZ CONTRACTING HAZARD ASSESSMENTDocument7 pagesAL QOOZ CONTRACTING HAZARD ASSESSMENTشاز إياسNo ratings yet
- JADWAL TRAINING TAHUN 2019 di JAKARTADocument4 pagesJADWAL TRAINING TAHUN 2019 di JAKARTABobby dari BKI Academy100% (1)
- # Iosh (MS) Version 5.0 Certified #Member:Iac, Newyork # International Qualifications From IrelandDocument5 pages# Iosh (MS) Version 5.0 Certified #Member:Iac, Newyork # International Qualifications From IrelandMANOJ KUMARNo ratings yet
- 002 Majnoon Site Specific HSE PlanDocument18 pages002 Majnoon Site Specific HSE Planالحاج راضي راضيNo ratings yet
- CleanbladeDocument9 pagesCleanbladeNikolay OngoyNo ratings yet
- Roto-Z: Safety Data SheetDocument8 pagesRoto-Z: Safety Data SheetGregory Alan Francisco IINo ratings yet
- Safety Data Sheet Nalco 9601 Pulv: Section: 1. Chemical Product and Company IdentificationDocument8 pagesSafety Data Sheet Nalco 9601 Pulv: Section: 1. Chemical Product and Company IdentificationSayed Salah100% (2)
- HIRA - Stressing Platform at Pylon and Working-Hcc F 001 15 001-r9Document4 pagesHIRA - Stressing Platform at Pylon and Working-Hcc F 001 15 001-r9Pinaki BhattacharjeeNo ratings yet
- Fire Safety Measures Rule ExplainedDocument138 pagesFire Safety Measures Rule ExplainedsubyNo ratings yet
- UN introduces OSH management systemDocument2 pagesUN introduces OSH management systemSomeoneNo ratings yet
- 2016 Gap Analysis TemplateDocument14 pages2016 Gap Analysis Templateamit545100% (1)
- Appendix DDocument6 pagesAppendix DShafiqulHasanNo ratings yet
- Layout Plane of Textile Testing Machineries.Document5 pagesLayout Plane of Textile Testing Machineries.Naimul HasanNo ratings yet
- WRB-P-P-003 - Instrument Installation Procedures Rev.A PDFDocument716 pagesWRB-P-P-003 - Instrument Installation Procedures Rev.A PDFNoliet YatnoNo ratings yet
- Machine Safety Risk Assessment SafetyIIDocument67 pagesMachine Safety Risk Assessment SafetyIIMarian Ion100% (3)
- HIRA in Process Safety PDFDocument16 pagesHIRA in Process Safety PDFAlvin AlfiyansyahNo ratings yet