ESEVIPDAR IDE CULECIIO NM Nigcy,
HAM eet yey
PLA) yar WMT MUM GAS Le
Dado doble digital con\P
INTERNET
MULTIMEDIA
, AUTOMATIZACION
TECNOLOGIA
0
i
Coc ac TC Scieur) aoa
altor y gerente gonival
Felipe Gonsilez G.
Comité Aseoe
Jonge Hern Sivarez 1.
Piazt Re
iuardo Hoyos Ch,
Director téentea
Felipe Goezalez G.
Subairector
Jorge Barto Hemdcdex M.
pe ci
os
Drperemtetothico
ae Sap.
esha v.
Cobos.
“alter 1 Zapa ©.
| Suan Manual ale 0.
taj Femina Ral i
i ual
eserta del editor. La proceciGn de os
aulorseextiende nossa contenido,
sna los diagrams yeirevtosimpresos,
‘isebo, quo en ella se reproducen,
Editorial
La electrsnica tiene tantas aplicaciones como nos
podamos imaginary no existe actividad humana alguna
que se pueda sustraer ast influencia. De abf su gran
avance y desarrollo, En esta ocasién presentamos tes
proyectos para los experimentaiores con aplicaciones
en campos diferentes. El “Medidor de luminosidad’, basado en un fotodiodo,
mide la cantidad de uz, natural o artificial, presente en wn punto determinado.
Sus principales aplicaciones se encuentran en fotografia, Tumbinotecnia y artes
_nificas. EI “Receptor AM de conversisn directa’ basa en un chip ZNA14Z,
le permitir sintonizar con gram nitidez las emisoras gue cransmiten en la ban-
da de AM de su localidad con un sainimo de componentes externos. Con tan
sélo tes terminals. y fa aparencia y tamallo de un simpte transistor el ZNS14Z,
contiene en st interior todos los elementos necesarios para fabricar un radio
AM. Aunque un equipo de este tipo se puede comprar por muy poco dinero. el
placer y el entretenimiento que se logra con este proyecto representan su ver-
dadero valor.
Por titimo, el “Dado doble digital con PIC” utiliza un microcontrolador
para generar uno o dos mimeros al azar, los cuales se representan en forma
digital 0 como dados simulados con LEDs. Este proyecto demuestra una vez
rs Ia gran versatilidad de los microcontroladores, los cuales con unos pocos
componentes externos, y un programa adecuado, pueden dar formaa una grant
variedad de cireuitos con aplicacién en todos los campos.
En la serie sobre comunicaciones inalimbricas con PC presentamos va-
rios cireuitos para enviar y recibir dacos entre computadores en forma inalém-
brica utilizando codificadores, decodificadores, transmisores y receptores in-
frarrofos. En la serie sobre automatizacidn casera hablaremos de Sos sistemas
que utilizan Jos teléfonos y las Hineas teleténicas para controlat todo tipo de
aparatos caseros desde cualquier sitio, algo verdaderamente itil en muchos
‘casos, Tainbign se presentan varios sistemas de autornatizacién casera por com
putador, una verdadera revoluciGn que apenas est empezando en nuestro me-
dio y que la podemos aplicar sin ningsin problema, En la serie sobre disefio de
Citeuitos impresos con PC continuamos cor un tutorial sobre el manejo del
programa EAGLE de Cadsoft, uno de los més féciles de manejar y con muy
buenas opciones para producir circuitos impresos de calidad en poco tiempo.
El articulo Sobre el software ENS VLE nos muestra el poder y la gran utilidad
de la simalacién de sistemas, en este caso de motores eléctricos, por medio de
{os computadores lo que acelera el aprendizaje de estos temas.
En la secci6n de electednica prictica presentamos varios circuitos de sen-
cillos transmisores FM para experimentar, una ejercicio para el mariejo de un
display de ctistal tiguido (LCD) por medio de la tarjeta de puertos 1/0 para PC
de CEKIT (K-093 y K-093B) y una noia de aplicacisn corrigiendo el funcio-
rnamiento del cireuito distorsionador Fuzz para guitarra eléctrica publicado en
niimero anterior de la revista, Sobre computadores ¢ Internet tenemos tres
anticulos de gran actualidad. Uno sobre el programa PageMill 2.0 que permite
la creacién de paiginas Web muy fécil y répidamente sin necesidad de utilizar
ellenguaje HTML, Otro sobre la optimizacién ce imagenes para ser utlizadas
en Tas pdginas Web de tal manera que estas no Se tomen mucho tiempo para
cargarse y Ia tradicional pigina sobre "Rutas y Lugares” en donde encontrarén
sitios con muy buena informaciGn tanto técnica vomo de interés general.
Ano TIN®3 = Medidor de iluminacién
con indicador
de barra de LED’s PAG. 4
Iuxémetra para fotografia
& onic, capes
Contenido descr nels des dee!
hasta 10,000 Ix. Conrangos
Electrénica seteccionables ¢ imicaci¢n
mediante LEDs de ta canyldad c
BROVEC TES uz incidente en el puyfb bajo |
Medidor de iluminacién con indicador bi
de barra de LED's
Receptor AM de conversion directa
Dado doble digital con PIG.
TECNOLOGIA Receptor AM
Control por computador de enlaces aan
‘ontrol por com il 22 PAG, 1 0 de conversién directa
inalambricos
—
Automatizacién casera. Sistema X10
El software ENS VLE
Disefio de circultos impresos con PC
Manejo de LCD.
con la tarjata YO para PC
Nuevos circuitos integrados
Jompacto sistema portitil de recepcién de onda
( media (AMM) basado en wn chip de
conversion directa de tes pines, Con
amplificador de potencia de auctio tcluido, Fécitmente
MULTIMEDIA ‘adaptable cone veep de AMELW (ona largeny
spréshicas’é Trabos: WW Este de emo)
Edicién de imagenes Web ... Dado doble digital { 6
con PIC PAG.
ste proyecto se ha
realizado con fines
sietasnente didéctices,
J nuestra algunos elementos
‘de hardware ¥ softwane gue
les pueden ser sie eM O1FOS
pra
* Cuaderno de experimentos ..
+ Noticias del mundo de la Electronica ....40 cieeuitos, El civeuito sionuila
+ Notas de aplicacién... 78 dos juegos diferentes: tos
populares datos wiiandas
fen muchos jucgos de san y
tun generador de mimevos
uleatorios
Seiiorletor: Lasconsitassobrelos proyectos otostinasde
‘estarevisty debenhacerse por esto, deaformamisexplicta
posibic a estas ofcins eu Petia, Colombia, S.A. ,
+ Portada: German Escobar » Fotografia: Héctor Hugo Jiménez Gutisetez >.
TECNOLOGIA
neste articulo se describen
¢l funcionamiento, la cons-
ruccisn y a calibracién de
{in sencillo medidor de uz pare apiica-
ciones de fotografia ¢ iluminacién, El
instrumento utiliza un fotodiodo como
sensor de luz y visualiza Ia cantidad de
fz presente en un punto en una colum-
nna de LEDS calibrada en unidades dis-
cretas de ilumizancia 0 flujo luminoso
por nidad de superficie (luxes 0 lx), Las
siguientes son algunas de las principales
ccaracteristicas y especificaciones de sis-
tema propuest, disponible en forma de
Kit 0 como producto terminado bajo la
referencia K-122 de CEKIT:
1YProporclona rangos de medida de
104x, 100 ixy 1,000 Is, con la opcion de
‘extender Los mistnos por un factorde 10.
Esta facilidad permite la medicién de
niveles de iluminacién hasta de 10,000
Ix, margen més que suficente para cu-
bir ta mayorta de aplicaciones de foto-
‘gratia e ingenieria de iluminacién.
Opera mediante una bateria de
QV, fo cual lo hace extremadamente
portatil y facil de usar. Con el fin de
4
Construya este practico luxémetro para fotografia e iluminacion, capaz de detectar
niveles de luz desde 1 Ix hasta 10,000 Ix. Con rangos seleccionables e indicacién
mediante LEDs de fa cantidad de luz incidente en el punto bajo prueba. Basado en
un sensor de luz de estado sdlido (fotodioda) de alta sensibilidad.
gee NER. us
prolongar la vida stil de ta bateria, et
circuito utiliza como interruptor gene-
ral un pulsador normalmeste ubierto
que lo energiza mientras se realiza la
medicisn y lo mantiene desenergiza-
do el resto del tiempo. De este modo
se evita autométicamente que el medi-
dor consuma energia mientras no se
esti utlizando.
Y Utilize de un reforzador tipo
bootstrap con amplificador operacional
para intensifier Ia corsente del foto-
diodo y converita en un voltae pro-
porcional a la cantidad de lu ineiden
te, Este esquema garantizs ca alta li-
nedhidad en la respuesta y mejocs el
ancho de bands
1 Diseig robusto, confiable y eco-
némico gracias a a utlizacin de LEDs
‘en lugar del tradicional instrumento de
Dobais movil para desplegar la infor
macicn de iluminaneta. Asi se miimi-
acl iesgo de inutilzar el aparato cuan-
do se deja caer y se faciita la lectura,
incluso en ambientes con bajos niveles
de luminacién donde un medidor de
aguja seria dill de ieer con exactitud
ry
La cantidad de luz que incide so-
‘bro una superficie. un punto-o an obje~
t0¢s un requisito clave en fotografia y
senel disefio de sistemas de iluminacidn.
‘Una buena iluminacidn contribuye al
contort personal. reduce la fatiga, me=
{ora laeficiencia individual en todas las
sctvidades y evita accidentes causades
por sa pobre visibilidad, Ademis si
ve de vehiculo publicitario, ayudando
a atraer La atencida hacia objetos 0 hve
gares especificos.
En fotografia, a iluminacidn jue=
20 un papel definitive. Una cantidad
exeesiva de luz ocasiona fotogratias
desteidas y sobreexpuestas, mientras
‘que uma cantidad deficiente dela mis-
ma se traduce en fotografias oscuras
y bottosas. En ambos casos, los dé~
talles se pierden y se tornan toshios @
‘nuistinguibles. Obviamente, parato-
mar fotograifas “decentes” el nivel
iluminacién debe estar dentro de Un
rango correcto. En todos estos casos
es mandatorio disponer de un medi
dor de luz adecuado. Et luxéenetro
CEKIT K-122-puede ser una exce-
tente alternativa,
ectrénica a Computsdores + Caer
En las figuras 1 y 2.se muestran, en su
orden, los diagramas de bloques y es-
quemitico del medidor de luz K-122
de CEKIT. Bi sistema utiliza un foto-
diodo (D1) como sensor de tuz y cons:
ta bisicamente de dos etapas: (a) un
amplificador bootstrap con buffer, de-
sartollado alrededor del amplificador
operacional LM358 (ICI), y (b) un
voltimetro bargraph de SV con LEDs,
desarrollado alrededor del cireuto in
tegrado L:M3914 (IC2), La tension de
alimentacion de ambos circuitos se 0b-
tiene de una baterfa estindar de 9 V
(B1)controlada mediante un pulsador
normalmente abierto (S2).
El fotodiodo D1 produce una co-
riente inversa medible que se incre-
rmenta o decrementa a medida que au-
rmenta o disminuye lx cantidad de luz
incidente sobre su superticie sensible.
El amplificador operacional 1C1A ac~
ia como convertidar de corriente a
voltaje, offeciendo una impedancia de
carga virtualmente igual a cero al fo-
todiodo, De este mado, ICIA absor-
be lacomtiente de cortocircuito de DI,
sin producir una caida de voltaje so:
Medidor de iluminacién con indicador de barra de LEDs
bre el mismo, y garantiza una relacién
lineal entre la luz incidente y Ia co-
rrionte producida,
Las resistencias RIVR2, R4R4 y
RS+R6 actian como resistencias de rea-
limentacisn o de feedbact, permitien-
cdo gjustar ia ganancia del amplificador
pars los diversos rangos de medicin
de luz. que puede registrar el circuito,
La sefeccién de la resistencia que debe
ir en un momento dado en el Lazo de
realimentacidn se realiza mediante
cualquiera de los interruptores S1-2
S1-4. Ai circular a corriente del foto-
dindo a través de ta resistencia de rea-
limentaciGn seleccionada produce en
la misma una caida de voltaje que es
compensada por un incremento en el
voltaje de salida de IC1A (pin 1), res-
taurando # OV el voltaje entre las en-
tradas del operacional
Las resistencias de realimentacién
cestin conectadas al punto medio de un
divisor de voltaje. formado por RT y
R&. Este ditimo reduce el voltaje de
salida de ICIA en un factor de 10.con
el fin de permitir que los valores de
las resistencias de realimentacién se
mantengan relativamente pequeftos,
especialmente la combinacion RS+R6.
Sin esta disposicién, el valor de la re-
sistencia de realimentacién deberia ser
10 veces el valor original.
La accién det divisor de voltaje
puede ser eliminada cerrando el inte-
rruptor SI-1, De este modo, tas resis-
tencias de realimentaciGn quedan co-
nectadas directamente a la salida de
ICIA y se necesita una iluminancia 10
voces Superior a la actual para producir
‘al mismo voltaje de salida que existia
antes de cortocircuitar R7. En otras pa-
labras, cada rango de medicién se ex-
tiende por un factor de 10.
EL amplificador operacional IC1B
acta como buffer, minimizando cual-
uier efecto de carga del voltimetro bar~
graph sobre la salida de ICLA, Los tri
mers R6, R4 y R2se ajustan de modo
que, con SI-1 abierto y el interruptor
de selecciGn correspondiente (S1-2,
S1-3 0 S1-4) cerrado, produzcan una
tensién de SVDC a la salida del IC1B
(pin 7) cuando el nive) de ituminacién
captado por el fotodiodo sea de 10 Ix,
100 Ix © 1,000 Ix respectivamente.
Con S1-1 cerrado, estos niveles de-
beriin ser, en su orden, de 100 Ix,
1,000 Ix © 10,000 Ix para producir Ia
misma salida de SV.
Solector de
rango j escalas
immer de ajus
de voltae
vor: Loe.
cs
2aF
El voltaje de salida de IC1B, que
8 proporcionat al flujo luminoso por
‘umidad de supesticie tiluminanci 0 ili-
_migacién) captado pore! fotodiodo. se
aplica a la entrada de sefial (pin 5) de
IC2 (LM3914), Este iltimo esté eo
gurado como voltimetro de 0 a SV ¢
impulsa una columna de 10 LEDs (D3-
12) en el modo punto. Ast, D3 se ilu-
mina para voltajes entre 0.50V y
1,00V, D4 para voltajes entre 1.00V y
LSOV, DS para voltajes entre SOV y
6
ae.
* <-—
‘Auste de
‘ote
1m
2.00V, y asf sucesivamente. El rango
de voltajes de medida fo determina el
punto de ajuste de R12
Los dems componentes cumplen
funciones auxiliares, Por ejemplo, D2
limita ef maximo voltaje entregado al
voltimetro a 5.1'V; RY determina la ga-
nancia de corriente; RU propor
nan una ligers eafimentacién positi-
va necesaria para ta accion de boots
trap: RU y C1 configuran el nivel DC
Figura 2. Diagrama esquematico
dle salicla de ICA: C2 y C3 eliminan
oscilaciones indeseables; R13 limita
la corriente 2 través de D3-D12 a un
valor seguro, etc.
Construccién
En la figura 3 se muestra la guia de
localizacién de componemtes del me- |
didor de luz CEKIT K-120, La lista
completa de materiales se presenta en
Eleetrénice 6 Computadores » CHAE
uunodelos recuadros. Con el fin de con
seguir un disefo compacto y contix
bie, el equipo esti proyectad de modo
que todos los elementos. con excepcidn
de Ia baterfa, puedan montarse diree-
tamente en Ia tarjeta de circuit impre-
$0. Esia disposicién permite que pue~
da ser flmente manipulado sin ne-
cesidad de chasts,
‘Como siempre, comience inst
lando tos puentes y los componentes
de bajo perfil (R1, R3, RS, RT-RIL
RIB, D2). Cootinue con las bases le
Jos creuitus inieyrados CL, 102) os
trimmers de eabibracisn (R2, R4. RO.
R12), el dip»witch (S1), el bordn de
encendido (S2) y los condensadores
polarizados (C1-C3). Estos thinios
deben ser prefesiblemente de tantatio
‘0 de montaje axial con el fin de gar
espacio vertical y no interferir con la
proyeccidn de $1, $2 y D3-DI2 fuera
del chasis,
Finalmente, instale el fotodiods
(DI) y los LEDs (D3-1912) como se
indica. Para facilitar el montaje de es-
tos componentes en el chasis, doble
Dien dngulo recto 3 0 4 mm del
Eiectrénica « Computadores + CHRCAT
Medidor de iluminacién con indicador de barra de LEDs
‘cuerpo de modo que flote a una alt
rade 203mm por encima de la tarje
ta, Corte tambien los LEDs de modo
‘que quteden flotando a una altura de 5
6 num de la tarjeta, Por sltimo, suet-
deel conector de fa bateria a los pads
correspondientes. Tengu en cuenta
que el rojo corresponde al positive y
cel negro al negativo,
Revise bien su trabajo para detec
tar soldaduras defectuosas o faltantes,
puentes de sotdadura entre pistas adya
centes, componentes mal orientadas 0
ceolocatios, ete. Una vez corregidos t0-
dos los posibles errores de montaje, ins:
tale los cireuitos integrados (CT e 1C2),
cconeete Ia baterfa y proceda a ka eati
bracidin del equipo.
Calibracion y prueba
Para calibrar el medidor de luz CEKIT
122 usted nevesitari dos bombillas in-
cuescentes ordinasias, una de 6OW y
cra de LOOWY, instalalas en sus respecti-
vs porkilamparas y dots de enchufes
apropiados. También debe disponer de un
lesornillador de ajuste, un flexémetto y
un multienetco digital configurado como
voltinet DC. Est iltimo puede sersus
tituido por un osciloscopio,
La idea baisica del proceso de en-
libracién es situar la fuente de tz (la
bombilla) a distintas distancias del
sensor y graduar fos trimmers de ajus-
te (R2, R4, R6y R12) de modo que la
lectura en los LEDs corresponds a la
iluminancia en eve punto. Para esia
operacién nos gutaremos por la table
T, que indiea los vala-
res de iluminancia t
pivos produeidos por
bombillas incandes-
ccentes de GOW y LOW
4 varias distancias,
Si en ef cartén de
tempaque de las bom-
billas Figura el niime-
ro de lumens (flujo
luminoso) producido
por las mismas, usted
puede cafcutar la ilu-
minancia real
do La formula
ican
60 240 10
60 105 50
100 100 100
100 45 500
100 80 1000
100 20 2500
100 13 5000
Tabla 1. lluminancia producida por
lamparas incandescentes
de 60W y 100W
8
| aot
siendo Ela iluminancia en tuxes (x),
sel Mlujo fuminoso en lumens (im) y r la
distancia en metros (m)entre la fuente de
luv y el sensor. Como referencia, la tabla
2 reluciona el flujo lumineso tipico pro-
lucido por kimparas incandescentes nor-
males de uso general, Estos valores son
‘vidos tinicamente cuando la kimpara se
‘opera como un radiador libre, sin reflee-
ores, y lasuperficie exterior dela misma
esi libre de polvo y otras sustancias
Antes de comenzar el proceso de
calibraci6n, asegdrese que en el dre
escogida para la calibracién no hayan
otras fuentes de lw distintas de las men-
cionadas, ni existan superficies reflec-
tora de luz como espejos, vidrios, etc.
Durante la calibracién, evite que su
somibra o Ia de cualquier objeto circun-
dante incida sobre el sensor y altere Ia
medida, Para la calibracién del medi-
dor proceda asf:
Tabla 2. Flujo luminoso producido
por lamparas incandescentes normales
TECNOLOGIA
‘uate range Yo
‘ust argo too —
‘ste ange 1000
1. Conecte el multimetro, configurads
come vottimetro DC, entre 1a salida
de ICIB (pin 7) y tierra, Para facili-
tareste chegueo.en el medidor se pro-
Poteionan dos puntos de prueba ro-
tulados, respectivamente, como TPL
@) y TP2C).
2. Site los trimmers R2, R4, R6y R12
‘en sus posiciones intermedias.
3. Seleccione en el medidor el rango de
10 Ix cerrando cl interruptor S1-2 y
abriendo los interruptores $1-1, S13
y Sl
4, Conecte la bombilla de GOW y site
ef sensor del medidor a una distancia
de 240 em (2.4m) de la misma. Bajo
ess condiciones, la iluminancia en
el punto del sensor debe serde 10 lux.
5. Pulse el bot6n S2 y observe la lectu-
ra de voltaje. Manteniends pulsado
'$2,a¥ccione lentamente el trimmer R6
(IM) hasta que la fectura de voltaje
seat justamente de SY.
6. Accione entonces lentamente R12
Tiley i
Biol tho G8 08 07 08 os os oof I+
EF QOOOOOSSS:
LEDs inact nia
‘dosomnason
Figura 4. Guia de localizacién de documentos
hasta que se luminen simulténeamen-
te los LEDs DIL (°X0.9") y DI2
(°x1.0"), Cierte el interruptor SIsL
Solamente debe jluminarse el LED
D3 (x0.1). Libere e] botdn $2 y abra
fuevamente el inrerruptor S 1-1
7, Sefeccione ene! medidorel rangode 100
Ixcerando el interuptor S1-3 y abrien-
{do los intemuptores $1-1,S1-2y SI-4
8, Desconecte la bombilla de 60W, co-
necte Ia bombilla de 10OW y sitde el
sensor del medidor a una distancia de
100 em (1.0 m) de esta tltima. Bajo
estas condiciones, la iluminaneia en el
punto del sensor debe ser de 100 Tux.
9. Pulse 52 y accione lentamente R4
(00k) hasta que La Lectura de vol
taje sea justamente le SV. Deben iki-
minane siawultsneamente los LEDs
DI ty D12, Reajuste ligeramente RI2
si ey necesario. Cierre el interraptor
SI-1, Solamente debe iluminarse el
LED D3 ¢"x0.1"). Libere $2 y abra
nnuevamente el interruptor $1-1
eatar
| Esealeras, Dodogas, ics y dasvanes 30h
| Garages, s6tanos, corredores. 60x
| Halls, quardatropas, befios, cuartos de niiios 120 Ix
| Cocinas, salas, comedores, estudios 250
abajoodecostura 500 ix
ic is, Salones de clase 750 x
“Salas de dibujo, talleres de ingeniorta de precision 1000
| Trabajos de dibujo detallades, construceién
| de equipo miniaturizado 1500 x
_Reparacién dle relojes mecanicos 2000
8
10, Seleccione en el medidor el range
de 1000 'x cerrando el interruptorS1~
4 y abriendo los interruprores SID.
SL2ysi3
11. Con Ia bombilla de LOOW conectar
1a, situe el sensor a una distancia de
30 cm de la misma, Bajo estas.condi-
tones, la iluminancia en el puntodel
sensor debe ser de 1,000 lux.
412, Pulse $2.y accione fentamente R2
(10k) hasta que ka lectura de Wolta-
je sea justamente de SV. Deben ilu-
rminarse simulténeamente fos LEDs
D1 y Di2. Reajuste ligeramente R12
si es necesario, Cierre el interrupter
Si-l, Sotamente debe Hurtinarse el
LED D3 (°x0.1"). Libere S2 y abea
nuevammente el interruptor S11,
13, Seleccione en ef medidor el tango
de 10,000 ty cerrando los inteerupto-
res SI-4 y SI-1. y abriendo los inte
ruptores S1-2 y SI-3.
44, Cox ta bombilla de LOOW conceta=
da, situe ef sensor a una distancia de
13.em de la misma. Bajoestas condl-
ciones, la iluminanciaen ef punto det
sensor debe ser de 5,000 lux.
15. Pulse S2. La lectura de voltaje debe
ser del order de 2,5V y deben ituntl-
nase simultineamente los LEDs D6
0.4") y D7 ('x0.5"), Reajuste te
sgeramente Ia distancia entre el sea
sor y la bombilla haste que esto suce=
dda, Abra el interruptor SI-1. Sola-
mente debe iluminarse el LED DI2
(x1.0"), indicando que la iluminan-
cia es superior a 1,000 Is.
Una vez calibrado el medidor, ase
gure la tarjeta le baterfa y el pulsador
de accionamiento (2) wa chasis ade-
cdo uilizando los aecesorios de fle
jacién aplicables (tornillos, separado-
res, tuercas), En la figura 4 se muestra
el aspecto final oftecido por la tarjeta
ensamblada, Si utiliza un chasfs, lsu
Perficie sensible del fotodiode debe so~
bresalir por ef agujero de la parte fron=
tal. Los LEDs (D3-D12), cl dipswiteh:
(S1) y el pulsador ($2) deben sobresa-
lir por los agujeros correspondientes dé
la parte posterioe La bateria debe que-
at tirmemente aprisionada en sa 8
porte sespectiv.
Para utilizar el medidor de luz
CEKIT K+122 en la préctica, sige
este procedimiento:
Hlectrénica « Computadores + CamCAT
4. Programe en SI ol rango de medida
deacuerdo al valor probable deilumi-
naci6n esperado, Por ejemplo, para se-
leccionar el rango de 100 Ix,cierre St~
3y mantenga abiertos los tres interup-
tores restantes. Si lesconoce el valor
probable de huminacisn, comience por
‘elrango ms alto (10,000 Ix).
2. Enfoque et sensar hacia Ia fuente de uz
Evite que le sree desu cuerpo incida
sobre el sensory distorsione la medida
3. Acciono el botin $2. Los LEDs de la
‘scala bargraph s iluminaran secven-
cialmente desde D3 ('x0.1") hasta que
fa leotura se estabiliza en un punto, di-
‘Bamos en D9 Cx0.7") Si solamente se
enciende él LED D12 ('x1.0"), lo mis
probable 2s que la medida esté fuera
del rango seleccionado. En este caso,
utilige el sango inmediatamente supe:
doe Si no s¢enciende ningsin LED. uti
lice cl rango inmediatamente inferior.
4. Determine el line inferior del inte
valo de iluminancia multiplicando el
ranga seleccionado (100 Ix) por el fac=
tor asosiado al LED activo (0.7), En
nuestro ejemplo, este limite es 1040.7
= 701s Por tanto, la iluminancia en el
‘punto bajo prueba esti entre 70 80 Ix
Notas:
1.Lalectua solamente seréexactacuan
do se ilumiaen simultineamente dos
LEDs adyaventes. En este caso el va
Jorde iluminancia sere indicado por
€1 LED de mis alto orden, Si en el
*lemplo anterior se iluminan al
‘mo tiempo D8 ("x0.6") yD9("x0.7"),
Jasluminancia sera exactamente de 70
Ix. Sise iluminan simultineamente D9
(120.7") y DIO C08"), la ituminan-
cia serd exactamente de 80 x
2. Sise requizre mayor exactitud, la ilu-
‘minauicia puede evaluarse midienéo
€l voltaje DC de salida det buffer
(VIp}, disponible entre TPL y TP:
-y aplicando la siguiente formula:
Porejemplo, sien cl rangode 1,000
Ixeste volige es igual a3.15V. el valor
Ae iluminancia correspondiente es sim-
plesmente 1,000x3,15/5 = 620 Ix
‘Hactr Computadores - Caachi
rn
Medidor de iluminaci6n con indicador de barra de LEDs
Aplicaciones
El medidor de luz CEKIT K-122 mide e!
flujo lurninoso por unidad de superiicte
(Gumens por metro cuadrado.o fxs) pro-
dducido por fuentes de luz naturales 0 in
candecentes en un punto determinado,
Este parimetro, denominado técnicamen
te fuminancia, iluminacién o Inefden-
cia luminosa, es el principal dato de di-
sefto utilizado por Jos ingenieros de ilu
‘minacin para proyectarinstalaciones de
tlumbrado, Por ejemplo, para escaleras
bodegas,sticos y desvanes se recomien-
dda un nivel minimo de iluminacién de 30
Ix, mientras que pars oficinas, laborato-
Flos, salas de lectura y salones de clase
este nivel minimo debe ser de 750 Ix
{La tabla 3 relaciona algunos valores
de ilumtinancia requeridos en varias situa
ciones tipicas. Como referencia, la ium
narieia en una noche sin Iuz es del orden
dde0.01 Ix, lade una noche con luna nueva
de (0.1 fx, lade uns noche con luna lena de
0.2 1x, lade un dia claro con cielo nebulo-
s0 de 20,000 Ix y la de un dia de verano
cont uz sofar brillante de 100.40 bx.
En fotografia, el dato de iluminan-
cia sirve para caleular el tiempo de ex
posicién (Ty el ndmero de aberturs (f)
requeridos para fa sensibilidad de peli-
cula utilizada, Por ejempio, para una
‘velocidad de pelicula de 21 DIN (100
ASA), una iluminancis de 120 Ix re-
quiece un tiempo de exposicién de 1 se-
gundo y unit abertura £.16. Si ef nivel
de ituminacidn se duplica (240 Ix) 0 se
reduce a la mitad (60 Ix). usted puede
‘compensar,respectivamente, el cambio
por cualquiera de estos dos métodos;
{a) Utilizando et niimero f de abertura
‘nmediatamente més alto (22) 0 més
bajo (£11) respecte al original, 0
(0) Utlizando un tiempo de expasieiéa
igual a [a mitad (2.5 segundos) 0 al
ddoble (2.0 segundos) del original,
Se sapone, naturakmente, que
velocidad de la pelicula permanege
cconstaate. Un incremento 0 disminu:
cin de Ia velocidad de Ia pelicula en
3 DIN dobla o reduce a la mitad, res-
pectivamente, tanto la figura ASA
‘vom fa ilominancia. Por ejemplo, i
fen el caso anterior la edmara se earga
‘con sua pelicula 24 DIN (200 ASA}o
18 DIN (50 ASA), y el medidor mues-
tra una lectura de 120 Ix, usted debe
‘compensar el cambio utilizando, res-
ivamente, una abertura numérica
11,0 un tiempo de exposicién
6.0.5 0 de 2.0 segundos. KE
Figura 5. Aspecto final de la tarjeta ensamblada
PROYECTO
Receptor AM
neste articulo se deserihen
zl funcionamiento, a cons:
ruccién y tacalibracién de
tun seneillo receptor de radio TRF 0 de
conversiOn directa basso en el chip,
ZN4IAZ de Ferran Fl sistema oper
ccon una baterfa estind de 9V. es muy
estable y selectivo, no requiere njustes,
yy exhibe, entre otras, Tas siguientes ca
racteristicas:
¥ Capta estaciones de radio que trans-
‘miten porel sistema cle amplitud n0-
dulada (AM) en Ja banda comercial
de onda media 0 MW (530 x 1605-
kz), La seleccién de las emisoras se
realiza mediante un clrcuito RC sin-
tonizable de! mismo tipo de los ail
zauos en [os receptores convenciona-
lesde AM. Con Tigeras modificacio-
nes, el receptor puede ser adaptado
pura captar estaciones de onda larga
(150 300KHZ) y de WWY (2.5, 5,
10, 15 y 20M).
+1 Proporciona una excelente calidad y
nivel de reproduecisin de sonide gra~
cias la incorporaesn de un ampli-
fieadardeaucio de alta ganancia
atmo, desarollado alrededor de un
circuit integeado LM3B6. nclaye un
control de volumene inipulsa un par-
late de 82/0 5W
Figura 1. Circuito integrado ZN414Z
10
de conversion directa
Compacto sistema portatl de recepci6n de
onda media (AM-MW) basadb en un chip de
conversién directa de tres pines. Con
amplificador de potencia de audio ineluido.
Fécilmente adaptable como receptor de AM-
LW (onda larga) y WWV (seftales de tiempo}.
Jorce E. Hernannez Mt
iza un dimer muy reducido de
partes en comparacién con un Tevep-
tor superieterodino convencional,
Esto conduce a un disefio muy com-
acto y Ficil de usar. Todos los com=
ponentes, con excepcidn de la bate-
ria y ef parlante, estan montados s0-
bre una misma tarjeta de circuito im=
preso. Para mayor comodidad, con=
fiabilidad y economia, el receptor
puede adquirirse ensamblado 0 en
forma de kit bajo la referencia K-20
de CEKIT. No incluye chasis
En lay siguientes secciones se dese
criben el funcionamiento, la construe:
cidn y la prueba del receptor de AM
CEKIT K-120. Sin embargo, antes de
centraren matetia, es conveniente cono~
cer las principales caractenisticas del cite
cuito integrado ZN414Z,, el corazén de
este proyecto.
El circuito integrado ZN414Z
FIZNA1AZ, desarrollado originat-
mente por Ferranti, es an completo sis-
tema de recepeién de AM de conver-
sidn directa (TRE) que integra, en un
mismo chip, un amplificador de RF sin-
tonizado de 4etapas, un circuto de eon
trol automitico de ganancia (CAG) y
un detector de audio (figura 1). Las
guientes son alguns de las caracterise
caxir
ea & Computadores
ticas y especificaciones més relevantes
de este dispositivo, disponible en cép-
sula plistica TO-92 de 3 pines:
V Puede operar con cualquier tensién
de alimentacién entre 1.1V y L6V,
proveniente, por ejemplo, deuna pila
de 1.2V 0 1.5V. El fabricamte reco-
mienda trabajarlo a 1.3V, Bajo estas
condiciones, el consumo de corrien-
tecon una carga de 64es tipicamen-
tede 0.3 a 0.5 mA.
1 Especificado para trabajar en el
rango de frecuencias comprendi-
do entre 150kH2 a 3MHz, aunque
puede ser empleado con éxito en
frecuencias superiores a 7 MHz
Esta caracteristica lo hace apro-
Piado para su utilizacién como re-
ceptor AM de estaciones de onda
larga (150 2 300kHz), onda media
© AM estindar (530 2 1600kHz) y
WWY (2.5, 5,10 y 15 Miz). Es-
tas tltimas, operadas por el NIST
(National Institute of Standards
and Technology), emiten durante
todo el dia, desde Fort Collins
(Colorado, Estados Unidos), una
gran variedad de datos stiles in-
cluyendo los siguientes:
+ La hora y fecha universales 0 UTC
(Universal Time Coordinated)
+ Tonos estindares de audio de 440,
500 0 600Hz que modulan en am-
plitud ta portadora principal.
+ Status de los sistemas de posiciona-
miento global GPS y de navegacién
OMEGA.
+ Anuncios de tormentas en los océa-
nos Pacffico y Atldntico.
+ Mensajes de alerta geofisicos tales
como Ia actividad de las manchas
solares y del campo geomagnético
de la tierra
+ Estindares de frecuencia de 2.5, 5, 10,
15.0 20MHz, representados en la por-
tadora, para calibracién de equipos de
‘comunicaciones y de otros tipos.
°V Umbral de sensiilidad (minima se-
fial de entrada discernible sin ruido)
tipico de SOnV. En la prictica, este
parimetro depende del factor de ca-
lidad det circuito de sintonfa conec-
tado al pin 1 (entrada de RF) y del
valor del voltaje de alimentacién.
Hlectrénica e Computadores + Cumncér
Antana RE modulada
iat
Receptor AM de conversién directa
RF de Modulada
par
vv
Cir
esr
¥
=e
(sid 100 Ra
=|
Dotale de a tonto
‘3 almentacin
1 Puede manejar directamente un au-
difono de 400 a 6002. Para impulsar
tun parlante de baja impedancia, la sa-
lida de audio (pin 3) debe acoplarse
capacitivamente a Ia entrada de un
amplificador de audio. Con una car-
ga de 640, la maxima salida de au-
dio antes de producirse recorte es ti-
picamente de 60mVpp.
V Efectivo sistema de control automat
code ganancia (CAG) fécilmenteajus-
table mediante la seleecin de una re-
sistencia externa, La accién del CAG
depende fuertemente de la impedan-
cia de la carga (amplificador 0 audifo-
nos), pero se puede independizar de la
misma utlizando un condensador de
sislamiento entre esta iltima y la sali-
da de audio (pin 3.
\ Proporciona tpicamente una ganan-
cia de potencia de 72 dB, una impe-
dancin de entrada de 40MO, una se-
lectvidad de kz, una dstorsionar-
indica total (THD) del 3%, an ran
20 de AGC de 20 dB y un votaje de
salida en reposo de 40 mV.
Ademis de receptores de AM y
WWV, el ZN4L4Z puede también utili-
zarse en una gran variedad de aplicacio-
nes, constituyéndose, junto con el
ZINAISE y el ZN416E, en uno de los
chips de experimentacién con radio més
RF
Figura 2. Diagrama de bloques
t
Aeguee L
t
Control
de vaumen
versétiles y econdmicos de que se dis-
pone actualmente. Por ejemplo, si se sin-
toniza a una frecuencia fija de 1,75 MHz
yy se continua con un convertidor de 2a
54 MH, pueden captarse transmisiones
de onda corta. Si se introduce realimen-
tacién positiva de RF y se hace ascilar,
of ZN414Z permite demodular emisio-
nes de banda lateral nica (SSB),
Diagrama esquematico
En ls figura? 3 se muestran,en su
orden, los diagramas de blogues y es-
{quemidtico del receptor AM de conversién,
directa K-120de CEKIT. El sistema cons.
ta bésicamente de un circuito de sintonta
LC, un amplificador de RF de cuatro eta-
pas, un detector de audio, un amplifica-
dor de audio y un regulador de voltae.
Las etapas amplificadoras de RF (inclu-
yendo un bufer de entrada de muy alta
impedancia y de detencién) vienen in-
cluidas en el ZN414Z, (ICL). La tensién.
general de alimentacién la proporciona
tuna baterfa de 9V (BI),
El circuito de sintonia lo consti-
tuyen LI y CS. Su funcion es selec:
cionar, entre todas las seftales que lle-
gan a la antena, la portadora de laes-
taci6n de AM que se desea escuchar.
Las demas seftales se envian a tierra
através de C4, La seftal de RF simto-
1"
Taare
PROYECTO
\
inten
ca
de forrita owe
Ri: Rojo: Vr: Verde
Rs: Rosado; Negra
nizada se aplica a los amplificadores
del RF del ZN414Z.y, una ver-ampli-
ficada suficientemente, se entrega al
detector 0 demoduladar interno det
mismo chip.
La funcién del detector es sepa-
rar Ia informacién de audio (AF) de
Ia portadora de RE, enviando esta il
tima a tierra y dejando pasar la pri-
‘mera hacia et amplificador de audio.
Este iiltimo, desarrollado alrededor
del circuito integrado LM386 (1C2) y
sus componentes asociados (C3, C6-
10, R6, R7), amplifica Ia seal de au-
dio y Ia reproduce en el parlante
(SPK1). EI potencigmetro RG acttia
como control de volumen y trae inco-
porado el interruptor genesal ($1).
El regulador de voltae, desarrolla-
do alrededor dei transistor Q1(2N3904)
¥y sus componentes asociados (R2-R5,
(C2) permite que el ZN414Z, original-
mente disefiado para trabajar con vol-
tajes de alimentacién entre LAV y 1.6V,
2
co fe
ONE
ai
2N3904
Ro
100K
ca
4aTuF
10K
Figura 3. Diagrama esquematica
opere confiablemente a partir de Ia ba:
terfa de 9V. El potencimeira RS se uti
liza para ajustar el nivel DC en la sali
da det 2N4142 (pin () a 1.3V, queesel
voltaje de alimentacién recomendado
por el fabricante,
Los dees componertes eumplen
funcionesauxilires. Por ejemplo, RI ae
‘Wa como resistencia de conto automat
0 de ganancia (CAG), C3 asta et ampli
cador de crcito de CAG, Ct deseo
pla fa salida det ZNAVZ, JU} permite se-
leccionar cualquiera de las dos secciones
el condensstor variable C5 para conti-
urarel eicuitotangae Cdesinonia.ee.
Tosis los componentes, con excepeida de
Ja bateria(B1} y el purlante (SP), estin
nmontados ent misma tarjeta
Construccién
Bn la figura 4 se presenta la sia
de localizacidn de componentes del re-
ceptor AM CEKIT K-120 en fa tarjeta
vez: tses
de cireuito impreso incluida en el kit
La lista completa de componentes
ofreve en uno de 0s recuadeos. Debi
al reducido niimero de components i
Tizados. et montaje del proyecto es e:
tremadamente fii y no debe pres
tar mayores dificultades,
Comience el montaje instalando.
puene y las 5 resistencias fijas (RI,
3, RF, RT), Continge con el
de contro] de voltaje (RS), el cire
integrado ZN41412 (C1), el transis
2N3904 (QN), la base del circuit ing
grado LM386 (1C2), los 5 condens
res cenimicos 0 de poligster (C1,
C4, C6, C9), tos 4 condensadores et
trolfticas (C3, C7, C8, C10), los tres:
padiney (7
tonizador (F1) y ef conector de a
dl parlante (32),
Teng en cuenta la polaridad de
condensadoresetectriticos y lao
ciladores, ya que ne siempre son los
mismas, y fas bases de tiempo sé
pueden modificar de manera sustan~
cial. La tabla de la figura 2 muestra,
por ejemplo, que para un cristal LP
dde 32 KHz. los condensadores som dic
ferentes para microcontratadores PIC
16C54 y tos PIC 16C84,
Claro que en este proyecto, en dor
de se esté utiizando una red RC pars
generar fa oscilacién interna del micrO—
controlador, aunque las frecuencias
oscilacisn no soa fas mismas para unos
‘microvontroladores y otros, la diferen=
ccia no es significativa. ni la aplicacis
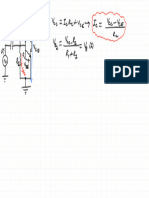
tectrénies « Computavores +
Dado dobie digital con PIC
sv
“3K Re
eo ——w
RB
*5V
< = 17. RT VA
anon ‘raz RAO *
st pai PE
= 05 as
a5
J ls
VOF ce ABH rx 2200 8 8
ts oo fS—7 1, +f Re of r
ee el,
rez} —21¢ 7447 o AER Ae
ee eo Ee a
RI
° le LE
in PIC * Gas, =}
Dt 16084 14 Ra, 19}
Be. Be | @ Wy sai ose
lan sl Display de Display de
4 ae ‘Anoda comin ‘Anodo comin:
t0,F0v
a c2
pes [10
85: eS.
. e feels
1
josc1 rer
Figura 1. Diagrama esquematico
Hectréaica » Computadores + CHICET 7
PROYECTO
Configurar Reto)
de Tiempo Real
———+
—_+—_—_
Lamar rutina
del Mostrar Digitos
——
Lamar rutina
‘de
Retardo y Actualizacion
a
Figura 2.a Diagrama de flujo del
programa principal
18
estan rigerosa; no se requiere precisién,
asi que podemos asimilar las diferen-
cias sin ningdn probleme,
El funcionamiento del circ
sencillo: tanto en los diodos LED
dividuales como en los displays de sie~
fe segmentos se visualiza el niimero
aleatorio. Agu, para optimizar las li-
reas del microcontrolador, se utiliza un
decodificador 7447 que se encarga de
_manejar los visualizadores de site seg-
mentos, con [a ayuda adicional de los
woes QS y Q6, que determinan
cual de ios visualizadores estardencen-
dido en un momento dado,
Ya que Q5 y Q6 son transistores
PNP que trabajan como interruptores,
unnnivel légico bajo en sus bases hard
que circule corriente por el colector,
permitiendo que se enciendan aque-
los segmentos cuyos citodos estén a
tun nivel ldgico bajo, puesto a través
del decodificador. En este caso las re-
sistencias R8 a RI4limitan la corrien-
te se circulard a través de cada seg-
mento, a un valor cercano a los 20
mA, mils que suficientes para lograr
una iluminacién adecuada de los dio-
dos LED de los segmentos.
La corriente de colector de cada
transistor también alimenta los LEDs
D2a DIS que simulan las caras de los
dados. Como se puede observar, aun-
que los transistores Q5 0 Q6 se en-
cuentren activados, s6lo se encende-
rn los LEDs si Jos transistores QL a
Q4, que estan trabajando también
como interruptores, tienen niveles 16-
‘gicos altos en sus bases, para permi-
tirque se presente una corriente en sus
colectores. Asi, si se quiere que sola-
mente se activen los digitos, bastard
con colocar niveles fogicos bajos en
Jas entradas de Qt a Q4.
Logicamente, todas las opciones
las controla el programa del micro-
controlador, dependiendo del estado
de los interruptores SI y S2, que de-
terminan st funcionamiento, fun
‘meataimente al momento de rein
lizar el sistema, por medio del inte-
rruptor $3. El programa para lograr
los abjetivos del proyecto no es com-
plejo: sélo se trata de utilizar et reloj
Conmutar registro
Ge vieusitacion
Figura 2.b Diagrama de fiujo 6
rutina de visualizacién
de tiempo real para Ia generacién de
os mimeros aleatorios y de mostrar
esta informacién en los diodos LED,
tanto del display, eomo los que con-
forman las caras de los dados.
En la figura 2 se muestran tos
diagramas de flujo del programa, tan-
to del cuerpo principal como de las
dos rutinas auxiliares y el eédigo
fuente respectivo en la figura 3. El
registro Fl, asociado al Reloj de
Tiempo Real (RTCC), se esté utitizan-
do como un temporizador, esto es, se
incrementa ante la ejecucién de las
instrucciones, y mas concretamente,
cada ocho ciclos de instruccién. Con
los vatores que se tienen para el osci-
lador (R=5KQ y C=20pF) se obtiene
tuna frecuencia cercana a los 4 MHz;
por tanto, en este cireuito Ios ciclos
de instcucciéa von pricticamente de
tum microsegundo (los PIC dividen la
frecuencia del oscilador entre 4, para
conformar un ciclo de instruccién).
El incremento del RTCC se apro-
vecha de das maneras. En primer lu-
gar, cada gue pasa por un valor 0 (a
intervalos de 256 x 8 ciclos de ins-
teucelén), 10 cual sucede aproxime-
damente cada 2ms, s¢ actualiza el
valor a mostrar en los displays y los
LEDs. En segundo lugar, a este mis-
‘mo intervalo se inerementa un regis-
‘ro, denominado en el programa prin-
cipal AZAR. Este registro se limita
‘algunos valores, dependiendo de Ia
‘configuracién que se tenga en los in-
tecruptores,
Si la opcién que se tiene por me-
dig del interruptor S1 es para dados,
cada uno de los elementos que se
mostrardn en los displays debe tener
un valor comprendido entre 1 y 6;
cuando se esta en la opcién de ni-
eros aleatorios, cada uno de los ele-
mmentos estard comprendido entre 0
y 9. Estos valores se incrementan y
limitan cada dos milisegundos, y para
el caso del generador de nimeros
aleatorios, dard un giro comple
cada 200 ms, o lo que es equivalen-
te, cinco veces cada segundo. Este
valor se detiene al momento de pre-
sionar el interruptor $3, el cual ge-
era una condicién de reinicializa-
Hoctrénice « Computatores - CaiciT
ee
Ratardo y Actualizaci6n)
Ine. registro AZAR.
La
SI Aapcisin 28 NO
‘dados
?
‘Liitar cada Limitar cada
nibble de reg. nibble de r
|AZAR a un BCD] AZAR 2 un
entre ty 6 ented y 9
Retornar
Figura 2c. Diagrama de flujo de la
tutina de retardo y actualizacién
cién del circuito, en donde no se bo-
rran los contenidos de la memoria
RAM del microcontrolador, y se
vuelve a iniciar el ciclo.
El incremento permanente del re
nistro RTCC se puede considerar
como una rueda que gira sobre su eje,
y la presi6n del interruptor $3 como
un dardo que se arroja a esa rueda,
para que se incruste en ella. Por su=
puesto, si la rueda gira lo suficiente-
mente répido y el lanzador adicional-
mente tiene los 0j0s ¢errados, al arro-
jar el dardo no podra determinar con
certeza donde caerd el dardo. Una
analogia es la que se implementa con
el programa y los componentes del
proyecto, para ambas opciones del
cireuito.
Dado doble digital con PIC
Como to podrin deducir tos que
han trabajado un poco eon microvan-
troladores, el nico inconveniente se
presenta para la primera lectura, al mo-
mento de energizar el cireuito. El fa-
bricante, en a literatura qu entrega con
el sistema de desarrollo de los PICs,
firma que el valor de inicializacion de
40s registros, al momento de la ene
zacion, es inéeterminado: lo mismo
pueden ser ceros que un0s, 0 una com-
binacisn aleatoria de ellos
AAsf, sino se tiene un control so
bre el primer valor del registro tempo-
rizador, se puede perderel dominio del
programa, Por ejemplo, si este comien-
za con un valor de FF hexadecimal, al
cenmascarar para que solo sobreviva la
parte baja y al consultar una tabla de
datos de tinicamente 10 elementos, po-
demos dar por fisalizado nuestro pro-
arama, ya que no sabemos lo que su-
‘eederd dentro de él. Esta es la tinica
razé6n de una tabla die datos de 16 ele-
mentos, para prever la condicién del
valor a mostrar en el momento de la
energizacién
Otro de los aspectos tener en
cuenta, es asegurar que el registro de-
nominado AZA se incrementaré a in-
tervalos regulares, sin importar que
pase de 28 4 29 0 de 99 a 00. Si le
segunda transicién se demora mas
que la primera, se estarfan violando
condiciones de igualdad en Ia proba-
bilidad, y algunos nimeros serian
mis repetitivos que ottos. En el ejem-
plo de la rueda, si ésta tiene siete
franjas y una de ellas es el doble del
tamafio de las otras, la probabilidad
de que el dardo caiga sobre esta fran-
jano es 1/7, sino 1/4.
El proyecto se realia6 con un mi-
erocontrolador PIC 16C84, aunque se
puede utilizar un PICL6CS4, Por ello,
se ha evitado la utilizacion de instruc-
ciones que involucren los Tegistros
‘TRIS y OPTION de manera directa.
Estos se han utilizado més bien como
instrucciones, para que haya compati-
bilidad entre estos tipos de microcon-
troladores. De igual manera, se ha evi-
tado la utilizacién de interrapciones, ¥
de los Te¢istros y bits asociados aéstas,
asi como el anidamiento de més de dos
19
PROYECTO
List
cy eq
meq
RPO equ
INDIR equ
RTcC equ
PC equ
Sta equ
FSR equ
port.A equ
port.B equ
Ja posiciones de bits
jon el registro STATUS
sDirecctonaniento Indirecto
jReloj de Tienpo Real
HWontador de Prograna
jEstados de 1a CPU
{Puntero para Dir. Indirecto
sPuerto A, de 5 bits
jPuerto B, de 8 bits
e
2
5
@
rf
2
3
a
5
6
sDefinicién de registros
oust Liores.
FLAGS equ Och
CONTA equ Dh
AUX equ Fh
DIsP EQU 10H
Prov EQ 11H
AIR EQ) 2H
org 0 g
Fra movie @ :
TRIS. port-8
noviw 6? 1100! ;ConFigurar el puerto A
TRIS portA 5
nov OF
mov port.6
‘movin DE
movi port_A
mov AZAR,
ON DSP
clef PROV
Glee RTC
movtw b?10"
OPTION
sLlevar unos
Jol puerto B
}Llevar unes al puerto A,
fopagar transistores,
sbajada,tero,x, tiner, 8
para conFigurer reg. OPTEON
call CHOIG
coll DELAY
goto Queda
noviw afb
ovif port_8
btfsc port A,3
goto UN9)
Shop DISP
novi b*0211"
xoraf port
xo nov DISP,H
andlw @Fh
call TABLA
btfss port A,2
andy off" enviar solo rumeros
movaf port B
retlw 3
jLlana ruting mostrar digitos
fUlonar rutina de retardo:
HQvedarse en un Loop
curs
DELAY movtn @
XORNE RTC,
btfss sta,20
goto DELAY
ine prov
beFse port A,2
goto DAO
DAA ov PROV,
andlw ofh
xerly 20
bess Sta,70
10 QUE:
sRetardo cercano a 2,5 ms
movin &
‘adn PRY
tnoviy OFA
xonwe PROV, w
btfsc Sta, 70
eclrf PRO
QUE —tovf PROV,»
sts nov AZAR
retlu 5
diez
DX mov PROV,
andtw OF
xorly 6
befss Sta,20
Gor OLE
novly 20
adv PROV
novi 60h
xorvif PROV,
befsc Sta,20
cle PROV
OLE mov PROV,
‘odd 144
goto. sis
THBLA adainf PC
sratlee oceadcba
Fetlw b*o2096000" x
rrethy "20010001"
rnetly 700100010"
rettw b’ 00110011"
retin b'o1200i0R"
retin b*O1110101"
rretln b’11400110"
retly b’agcaoiii*
retlw 6709201000"
retin b’eeoo1002"
hap i
op
nop.
nop.
nop. j0En
retin b'2itieil1" 5 0Fh
END ;finolizacién para el ensarblador
Figura 3. Listado correspondiente al programa
Aspect final
del circuit
ensamblado
+ Computatores «
subrutinas. Como se recorder
PICI6CS4 earecen de interrupeiones y
su pila no puede almacenar més de dos
direcciones de retorno,
En la figura 4 se nuestra una. gui
4e ensatribe del crcuitocorresponiion-
teal jucgode azar. Como se observa, 10s
diodos LEDs se deben configurar para
simular fos puntos de lacara de un dado.
AT momento de ensamblar el circu,
recuerde que debe colocar fos elemen-
tosenorden de tamaio, comenzando con
los mis pesuefos,y respetando la pola-
fidad de aquellos que lo necesiten (dio-
dos, transistores,condensadores, ete) AL
terminar de armur et cireuito, y sin colo-
car el mierovontrolador, éste debra ali-
mentarse con una fuente regulada de 5
voltios, con la polatidad correcta
En este momento se pueden rea~
Jizar algunas pruebas al cireuito para
verificar su funcionamiento, Primero,
verifiear con la ayuda de un voltime-
tro si entre los pines 5 y 14 de Ia base
del microcontrolador se presentan una
diferencia de potencial de $ voltias:
si no es asi, se deben revisar las sol-
daduras, Posteriormente, se debe ve~
rificar el eambio de los estados Légi-
cos en 10s pines 1, 2 y 4 del miczo-
controlador cuando los interruptores
asociados se conmutan,
Si,con a ayuda de puentes de siam-
bre, en [a base lel microcontrolador s°
lleva ef pin 17 © 18 a un nivel Y6zico
bajo y simultineamente se llevan fos
pines 10 a 13 a niveles Wégicos altos,
los LEDs asociados a cada uno de los
transistores correspondiemies se debe-
rn encender (D2 2 DIS), Tambign, si
‘en este momento se llevan los pines 6a
9, de la misma base, 2 un nivel logico
bajo se debers formar un cera en el dis.
play cuyo transistor PNP tenga su base
cen un nivel logivo bajo, Puede formar
‘otros mimeros, dependiendo de las 1'-
neas de entrada del decodifieador que
se tengam en niveles logicos altos (pi-
nes 6 9 del microcontroladon).
Verificadas todas las condiciones
anteriores, se debe deseaergiaur el
circuilo e introducir ef microcontro-
Iador programado, con el programa
que sé muestra en la figura 3. Final-
Electronica & Commutatores + CHRCAT
Foc Ease
hry feb
brs met
aha re
bro Fine
Kat f
as oe nt
se eee are
Dado doble digital con PIC
DADO DOBLE e
DIGITAL CON PIC.
il
er eo
S@ Gris @ es
o~,@
Numer
Jugada
Clase
Bde juego’
de dados
t
Entrada
de voltaje
Figura 4. Guia de ensamble dal circuito
mente, se puede empezar a jugar, re-
cordando que debe descartar siempre
et primer dato que aparece en la con=
dicién de energizacién, ya que éste
‘no es muy aleatorio.
Este programa muestra, de mane-
a casi que inmediata, el nimero co-
rrespondiente en el display y en los
dados ante Ja presién del interruptor de
reinivializacién. Un inquieto por los
micracontroladores Ye puede realizar
rmodificaeiones para que, por ejemplo.
ante ta condicién de reinicializacié
Ios digitos muestren una cuenta ripi-
da, la cual se dosacelerera lentamente
hasta aleanzar el mimero correspon
dente, para crear més expectativs ¥
‘emacién al momento de establecer un
verdadero juezo. mp
TECNOLOGIA
Control por
de enlaces
inalambrices
‘nel iltimo articulo, mos-
6 un par de circuitos gue
teansmiten yreciben cuatro
bits de informacién a ia vez sobre un
enlace inalémbrico, utilizando energia
infrarroja, Ahora es tiempo de utilizar
este tipo de enlaces para experimentar
«0 Control y monitoreo por computador.
Tranemisor
El transmisor inaldmbrico utiliza ef co-
Jificador de control remoto MC 145026
de Motorola para enviar un flujo de
datos informacién de direccionamien-
to 4 un decodificador MC145027 que
acepta e] date si la direccién coincide
con la suya, En la figura | se muestra el
cireuito del codificador con los interrup-
tores manuales del articulo pasedo re-
emplazaios por una interface periféri-
cca programable (Pi) 8255 controlada
por computador.
Para controlar et codiicador por
medio de un computador, es necesario
conectar sus entradas de datos, direc-
ciones y habilitacidn de transmision a
salidas con cerrojo (la) controladas
porei computador.
En la figura 1, las dos mitades, 0
nibbles de cuatro bits det puerto A det
PPI controfan el dato transmitido y i di-
ecciGn. El nibble alto controla la entr-
dade datos D6 hasta D9 y el nibble bajo
Tas entradas de direccidn A} hasta A4,
Laquinta entrada de direccidn AS se lle-
22
JAN AXELSON
va a.un nivel alto para conseguir el con-
trot de los datos y las ditecciones con
sélo un puerto de 8 bits. Esto reduce el
rimero de decodificadores a los que se
puede transmitir de 32.4 30 £6, fo cuat
‘noes problema en muchas aplicaciones.
Laentrada de habilitacién de trans-
misign del codificador (TE) se conecta
al bit 7 det puerto C, el cual se puede
colocar en un nivel alto 0 bajo con ins-
trucciones de control de bit det PPI.
Las sefiales que se muestran en el
lado izquierdo del PPI (8255) se conec-
tan alas cortespondientessefales de da-
tos, direcciones y control en un circui-
to microcontsolacor 8052. Conecte el
pin 6 del PPI al chip select (CS) que
corresponda a Ia direccién de su PPI.
Las conexiones ai tao derecho del
ccodificador deben coincidir con et
cuito del eodificador descritos en el ar-
ticulo anterior. Puede utilizar cualquier
‘oscilador cercano a Jos 40 kHz y una
ompuerta NAND CMOS en el pin 15
del codificador. Aqui, y en Ios siguien-
tes diagramas esquemiticos, no se
rmuestran los pines de alimentacion de
los codificadoresitecodificadores y los
circuitos integrados digitales. Estos se
localizan en la configuracién diagonal
‘opuesta estindar. Bl listado 1 es un pro-
rama en BASIC 52 (BASIC del $052)
{que have que el codificador envie un va-
lor de cuatro bits a un circuito decodi
ficador como el que se explieé e2
articulo anterior. Aqui las lineas de
‘mentarig no tienen mimero,y ato:
Jineas de programa. Si usted di
programa directamente en BASIC
puede omitir los comentarios para
mayor velocidad en la digitacién y
Ih elecucisn, Si crea su programa
uneditor de texto para levarlo mis:
de al BASIC 52, puede incluir Jos
rmentarios, si lo desea. Este lengua
ignora cuardo eflos se carguen.
Si no tiene acceso a un sistema:
rmicrocontrolador 8052 BASIC, loa
tarjeta de WO que tenga un PPI 8255.
‘que el codificador no recibe sediales
reconocimiento det part del coi
después de la transmisiGn, ef
utiliza el mosio 0 del PPI, o sali
das bisicas, para escribir al cox
Los nibbles altos de los puertos Ay’
leben configurar como slidas.
El programa del lstado 1
por una direecion y un davo a t
tir, eseribe la informaci6n en el
A’y posteriormente lleva el bit 7
puerto C a un nivel logico bajo y
pués aun nivel alto para que et
ceador taasinita [a informacisi
Si la direcci6n transmitida
‘misma del decoditicador, e} dato
mitido aparece en la salida de éste,
Exctrénica a Computadores +
seftal de salida VT (Valid Transmission)
va a.un nivel légico alto. Si la direc
cién no es la misma o si el decodifica-
dor detect un error en la transmisién,
la salida VT permanece en un nivel 16-
‘gico bajo y el decodificador ignora cl
dato, El programa se queda en un loop
infinite-elcual se puede suspender pre~
sionando la combinacién de teclas
Control + C.
Se usted quiere hacer todo con un
solo puerto de 8 bits, puede unir cua
_quiera de las Iineas de entrada de direc
cién del codificador a un nivel alto (0
bajo, o-deiarse abiertas) y utilizar el bit
adicional del puerto A para controlar el
pin TE, Silo hace, tendré que utilizar
‘operadores booleanos (AND, OR) para
asegurarse que el dato y Ia direceién no
cambien cuando se conmute la sefal TE.
Sisabe que vaa transmitira una sola
direcci6n, puede unir todas las entradas
de direccién del codificatar y liberar
hhasta cuatto bits del PPI para otr0s usos.
EL PPL es s6lo una de las formas
de controlar el codificador. Cualquier
puerto con cerrojo puede hacer el tra:
bajo, pero deben tenerse en cuenta dos
consideraciones de temporizacién
para una transmisién valida, La prime
ra es que para activar la trans
Ia entyada TE debe permanecer en el
estado I6gico bajo al menos por 654s.
el circuito de la figura | cumple facil-
‘mente con este requerimiento.
‘La segunda, es que las direcciones
AL hasta AS y los datos D6 a D9 deben
permanecer éstables durante [a transmi-
sidn (aproximadamente 200ms con un
coscilador de IKHz). Esto puede garan-
tizarse manejando las direcciones y los
datos del codificador con salidas tipo
cerrojo (latches) y esperand el tiempo
requerido antes de cambiar fos conteni-
dos de este. Si desea controlar un codifi
ccadot con un computador personal, pue-
de salir a un puerto paralelo estindar 0
utilizar las salidas de cualquier tarjeta di-
ital 1/O disponible. (CEXIT K-093)
Aplicaciones del transmisor
En el Gitimo mimero se utilizaron
LED’s en las salidas del decodifica-
dos para monitorear ficilmente 1a
Hectrénice sComputndores » CaaChT
Dee OO
Comunicaciones inalambricas con PC. Parte 2
028 canter eanpura
FFE
PPTRRES
Codificador de control remato
Figura 1. Un circuito PPI 8255 puede controlar un transmisor infrarrojo
manejado por un codificador de control remoto MC 145026
face que el
‘artdguracicn de aston det PF
negara
“Introduzca,el dato a
COPA
rTE Cork Cy bit
x =
atte tea
EO
transmisién, También se pueden co-
nectar las salidas de datos a compuer-
tas Légicas, controles para relés 0 a
‘cualquier elementa que pueda contro
lar una interface digital de cuatro bits.
+5V. Las figuras 2 y 3 muestran es:
tas dos posibilidades,
En el circuito de la figura 2, de
nuevo un codificador controla
LED’s, pero en esta ocasién en for:
ma de un visuatizador o display de
siete segmentos. Un decodificador/
manejador de siete segmentos, un
4511B, convierte el dato recibido en
seftales que controlan los segmen-
tos del display el cual debe ser del
tipo citodo comin, Ya que hay mu-
has variaciones, no se incluye aqui
‘transnita el dato solicitado
A, Cesalidas, Baentradas
Sfotrogunan Ua direeciin de). endiflendun @O-asye:"s8
enviar (@-
Exeribir intorgecton de dtrecciGn y datos al’ puerto A
XBYCOF COOH:
el diagrama de pines del visualiza.
dor, 1o que queda bajo su responsa-
bilidad. El diagrama esquematico
tambign excluye las conexiones de
los componentes de temporizacién
y del receptar infrarrojo, a los pines
6,7,9y 10 del decodificader. Estos
son los mismos del circuito del artt-
culo anterior y también se muestran
en la figura 4
El listade 2 es un programa en
BASIC 52 que hace que el codifica:
dor transmita los valores solicitados
estos valores aparecen en el display.
Si usted cambia la direcein del de-
codificador, cambie el valor de A en
la linea 20 para que coincidan, En la
figura 3 se muestra el diagram #5-
23
TECNOLOGIA
quemético de un circuito que utiliza
fas salidas de datos de un decodifica-
dor para controlar un motor paso a
paso. Cada bit de datos controla una
bobing en ef motor.
El motor es de cuatro fases, seis
hilos, con un circuit manejador uni
polar. Cuatro MOSFET IRFS11 con-
mutan Ia corriente a las bobinas.
Cuando una salida de datos va a un
nivel I6gico alto, el MOSFET corres-
pondiente se activa, permitiendo el
flujo de corriente a través de la bobi-
na conectada. Los diodos [N4004
protegen los MOSFETs de fos picos
de voltaje generados cuando se dese-
nergizan las bobinas.
El listado 3 es un programs en
BASIC 52 que hace girar el motor es-
cribiendo en secuencia fos valores apro-
piados af codificador, EI programacon-
muta cada una de las bobinas secuer:
cialmente, Para un motor que gira 18
Los pasos deben seguir la secuen-
ia correcta, $i su motor no realiza une
rotacién completa, fas bobinas no se
estén controlando en el orien correct
Si esto ocurre, puede cambiar Las co-
nexiones de las bobinas 0 modifcar el
programa para corregir el problema.
Recuerde que cada transmision
-equiere cetca de 200ms para comple-
larse. Esto hace que la velocidad
maxima del motor sea 20x 0.2 seg, 0
4 seg por rotacién, A esta velocidad,
el motor se moverd continuamente, y
no se observarin los pasos. Por lo tan:
to, este circuito es bastante itil en me:
canismos de posicionamiento. Bl lis-
tado 3 inctuye un faop de retardo des-
pués de cada paso, Puede experimen
tar con diferentes valores de retardo
para determinar el tamaiio minimo del
Joop que puede utilizar, el cual depen-
deri de Ia velocidad de ta sefial de
reloj. Para hacer pruebas, puede bus-
car bajar la velocidad del motor in-
crementando ¢! retardo.
Para operaciones a velocidades
mas rapidas, una posibilidad podria ser
utilizar ef dato transmitido como un
24
os
OE
+f oh.
Joe
Dacoaicas:
«as end arco
control de velocidad, con maximo de
16 velocidades seleccionables, Sin
embargo, esto podria requerir circui
tos adicionales que interpreten el dato
ttansmitide y controfen [a velocidad
del motor de acuerdo a lo recibido.
Receptor
Ademds del control por computador del
transmisor, también puede agregar una
interface de computador al receptor Por
ejemplo, un data logger 0 “recolestor
dle datos” podria aceptar datos de un
transmisor emotoy procesarlos om
cenarlos para suuso posterior La fixura
4 mest ef diagrama esquemitico de
una interface de computador para el eir-
", el cual es
tambiga el prompr del BASIC 52, Sies
nocesario, puede digitar estas lineas ma-
rnualmente en el teclado.
Una limitacidn det cireuito inte
grado couificador es que transmite
Salo cuatro bits cada vez, mientras que
‘muchos datos digitales son de 8 bits
© més. Si el codificador es coatrola-
do por computador, puede dividir va-
lores més grandes en nibbles de cua:
tro bits y enviarios en secuencia, Si
no desea utilizar un computador en el
transmisor, la figura 6 muestra un
transmisor auténomo que divide un
26
Figura 4, E1 8255 también se
puede contigurar para recibir
sefiales de un codificador de
control remoto manejado por
un médulo infrarrojo
re
Cont
C7 en un
it
One 4
‘interrupciones,
ae
END
En ta i
EL dato esta en el,
0 CRBYCOFCOIHD AND 0
seen
byte en dos y transmite cada mitad a
Ja vez, El dato transmitido puede ser
cualquier valor de 8 bits con cerrojo.
incluyendo salidas de contadores 0
convertidores andlogos a digital
(ADC), interruptores como los mos-
trados en la figura 5 0 cualquier otra
salida digital. Los bits deben ser con
cerrojo, para asegurar que ellos no
cambiardn durante el tiempo total de
transmision de alrededor 600 ms,
EL dato a ser transmitido es divi-
dido en dos nihbels de 4 dits los cua-
les estin disponibles corno entradas de
un multiplexor 74HC157. La entrada
TIet0ete eecibtde en el decodtficador
én del PPI: A,C-salidas} B-entradas
eceltn del decouificadar @-15)
cribin divescidn ol puerto CCbajo), deshabilitor TE
iat ren por Flanco
ita recit
ieee
SELECT determina cual conjunto de
‘entradas aparecerd a las salidas Y, Cop
lalinea SELECT en un nivel bajo, le
‘entradas D6 a D9 siguen a las seflales
1A a 4A en el codificador. Con SE-
LECT en un nivel t6gico alto, las en-
tradas D6 a D9 siguen 2 las sefiales 1B
4B. La sefial STROBE es levada
un nivel Iégico bajo constantemente
para habilitar las salidas.
La transmisi6n requicre dos sefta~
les de temporizacién, una de las cus
Jes controla ala entrada SELECT det
multiplexor. Esté debe estar en un ni-
vel logico alto durante Ia primers
Hlectrénica « Computadores - CmmCA
transmisién y en bajo durante 1a se-
gunda, En la figura 6, un temporiza-
dor CMOS TLCS5 cumple con estos
requerimientos generando un pulso
alto de 300 ms, cuando SI es presio-
nado y liberado. El codificador trans-
mite el nibble alto cuando el pulso es
alto y el nibble bajo después que el
pulso va a un nivel l6gico bajo. Lia-
‘maré a esta seffal el pulso SELECT,
La segunda sefial de temporizacién
consiste en pulsos cortos de nivel bajo
«que habilitan al transmisor en los flan-
cos ascendentes y descendentes del
pulso SELECT, La figura 6 nuestra una
de las formas de hacer esto, utilizando
compuertas NOR 4001B. Un conden-
sador y una resistencia en las entradas
transforman dos de las compuertas
NOR en un generador de pulsos que
cenv(a un pulso cuando se presenta un
flanco ascendente.
Cuando el pulso SELECT tiene
un nivel I6gico bajo, el pin 10 de la
compuerta B es bajo, Cuando SE
LECT va un nivel Wégico alto, los pi-
nes 10, 5 y 6 van a un nivel Bajo y el
pin 4 a un nivel 16gico alto. El con-
densador en el pin 10 se carga lenta-
mente através de laresistencia, Cuan-
do el voltaje en los pines 5 y 6 alcan-
za el umbral légico de la compuerta,
el pin 4 va de nuievo a un nivel l6gico
bajo. El resultado es un pulso alto de
corta duracién en el pin 4 cuando la
seftal SELECT va a un nivel alto, Con
los valores mostrados para la resisten
cia y él condensador, el pulso tiene
tun aneho cercano a los 100 1S.
LacompuertaA funciona dela mis
‘matmanera, excepto que ésta genera su
pulsaeonel flanca descendent de SE:
LECT, Los ds pulsos son tas entradas
de la compuerta D, cuya salida es nor-
‘malmente alta, con pulsos bajos en los
flancos ascendente y descendente de la
seflal SELECT, Cada pulso bajo oca-
siona que el codificador transmita los
valores existentes en sus lineas de da-
tos D6 a D9.
‘La exactitud en el ancho del pulso
no es critica, El pulso SELECT debe
ser al menos de 200 ms para asegurar
que el dato correcto permanece selee-
Bectrénica « Computadores © Cac
Comunicaciones inalmbricas con PC. Parte 2
Te oem
Brograva 5
Seat ve
Cant guration bet
Yay. COFcoSh az
SHS
a7 rivel ialtie)
eee
Esperar por {nterrupciones
Soa
aa
B ke
esas
a Pere
320
S30
340
330
kr -inaratwr
“Interrt *
eon
FNP ar «
cn
315
i
cionado durante toda Ia
transmisién, La sefial TE
debe ser al menos de 65
1s para cumplir con las es~
pecificaciones del codifi
cador, Se debe liberar el in-
efruptor ST antes que Ia
sefial SELECT vaya a un
nivel l6gico bajo para pre-
venir que los rebotes me:
ccénicos del interruptor oca-
sionen transmisiones ex
tras indeseadas.
El listado 6 es un pro-
grama en BASIC 52 que | gs
dispone al receptor de la
figura 4 para detectar
transmisiones de 8 bits
desde el circuito de la fie
ura 6, Este programa
combina los dos valores
de cuatro bits recibidos y
los muestra como un va-
lor tnico.
Expandiendo el enlace
Todos los ejemplos mostrados aqui
asumen que se presenta el control por
computador solamente en uno de los
cextromos de la transmisién, Por su
puesto, también puede tener compu-
tadores a ambos lados, con dos mi-
Figura 5
cuatro inte
Cee
cierre de interruptores
‘A,Casalidas; B=entrodas
Escribe direcctbn en el puerto CCbajo), deshabilita TE
ieiones ctivades por Flonco
rar resultados
‘GOSUB 690 ELSE Gosus 700
ador do contol remote
ste codificador monitorea
ruptores y transmite cuando
se abre uno de ellos
crocontroladores comunicadndose el
uno con el otro, 0 un microcontrola-
dor y un computador personal, o er
tre dos computadores personales, Unt
transmisor puede enviar sefales a
miiltiples receptores, y cada recep-
tor aceptard solamente Las transil=
27
TECNOLOGIA _
siones direccionadas a éste, Pera gué
sucede euando dos transmisores en-
vian sefiales a un mismo receptor: 0
tun transmisor y receptor a cada ex=
tremo intereambian informecién con
otro similar ?
Si solamente un transmisor envi
a la ver, la interferencia no sera un
problema, Pero en muchos casos , us-
ted deseard identificar cual transmi
sor esté enviundo, Aunque usted puic-
de cambiar Ia direccién del decodifi-
cador para que coireida con un codi-
ficador espeeifico, esto no es de ayu-
da si usted desconoce cusl codifica
dor realizard Ia tcansmisi6n.
Una solucién es tener cada vodi-
ficador transmiitiendo en ocasiones es
pecificas: uno cinco minutos después
de la hora, por ejemplo. O, en un en-
lace bidireecional, con un codificador
y decodificador en cada lado, usted
puede utilizar un sistema de consulta
enel cual uno de los dispositivos con-
trola e! enlace enviando un mensaje
que de aviso al dispositivo receptor
{que es tiempo para transmit.
En un enlace bidireccional donde
ambos codificadores pueden transmitir
ala ver, cada sentido deberd utilizar un
diroccionamiento diferente, Por ejem-
plo, las transmisiones desde el disposi
tivo Aal B utiliza ladireccién [Sh mien-
tras que fas comunicaciones de Ba A
utilizan la direccién 1A. En mis expe-
rimentos con comunicaciones bidirec-
jonales, encontré que el decodificador
podia descitrar las transmisiones envia-
das para éste, cuando otto transmisor
estaba operando en las cercantas,
Si tiene un sansmisor y un receptor
cen el mismo dispositivo, a colocacién de
tana puntalle dptica entre el receptor y el
tmansmisor ayuda prevenirimterferencias,
Pruchsu material de apantallamiento part
asegurarse que éste bloquea la energia in-
frarroja, porque le capacidad de bloqueat
Ja luz visible no siempre es un indicador
cconfiable. Yo espero qucesios efemplos ie
den algunas ideas para lo que puede hacer
con un enlace infrarrojo. La proxima vez,
cubis tgenicas para incrementar la dis-
tancia de Ia transmis y mas sobre la
transmisin inalimbica,
28
a8 Pa
30 RETURN
REM Programa 6
REM Lee dos transnisiones consecutivos,
REM conbina el resultado en un valor de 8 bits
REM Configuraciéa del PPE: A,C-satides; B= Entradas
49 XBY COFCOsH)=B211
REN A= Direccion del decodificador (@ a 15)
2 a2
REM Escribe direccién al puerta C (bajo), deshabitita TE
REN CC-? en un nivel alto)
30 XBY. COFCOZH)=80H+A.OR. KaY COFCOZH)
REM Utiliza interrupeiones activadas’ por Flanco
49° TCON = TCON,OR.#
50 X40
6 bo
REM Esperar por intercupeién
70° ONEXL Sea
80 Wale 11
90 END
EMS ME Sen cL, obs SOVarC ES! A dcecnea Ae
REM es ta primera o 1a segunda del par
500 TF X= "0 THEN GOS¥s 600 ELSE GOSUB 700
510 RETE
REM La primera transnision es e! nibble alto
690 HN = XBY COFCOLH).AND.OFGH
610 Xen
620. RETURN
REM La segunda transnisién es e- nibble bajo
700 LNaXBY COFCOLH) .AND.OFGH
70 X-0
REN Conbina «ibbles ulto y baja e ingrine et resultado
U7 10H
ELECTRONICA PRACTICA
Cuaderno de experimentos
En esta seccidn se presentan circultos practicos, utiles. y sencillos. con componentes faciles de
conseguir, que usted mismo puede sasamblar utilizando un protoboard, un circuito inpresa_universal
0 cualquier otro métocio de construcclén. Todos los montajes han sido suficientementa
comprobados, pero usted! puede experimentar-con alles y adecuarlos a sus. recesidades particulares.
Una vez haya consequido et grado de furicionainienta deseado, fabrique un circuito imprese para su
proyecto.¢ instdlelo.en forma definitiva en un.chasie.metdlico o.pldstico.
Eote circuito es la etapa bdsica para un
peque?o transinisor de FM, La bobina se
constiuye con & 2 10 eepirae de alambre
N’22 enrolladas sobre wna forns aiolan-
te de V4". La seftal e¢ debe captar en un
radio normal de FM,
O+9V
Este tranemisor es muy facil de construir y sus setizles 6¢ pueden captar en un receptor comin de.
FM. Se puede utilizar para monitoreo, vigilar a un bebé, grabar los sonidos de la naturaleza. etc. La
bobina L1 se fabrica con & 010 vueltae de alambre enrolladae e_una formaleta aislante con Lin
didmetro de 1/4". La frecuencia de tranemisidn se alusta por medio del condensacor variable.
Hlectrsnica 8 Computadores = CHERCAT
Cuaderno de experimentos
TRANSMISOR FM DE RASTREO CON 4 TRANSISTORES.
Con este circuito se emite un pulso constante en la banda de FM que 6¢ puede utilizar para ra
tun objeto en el cual 6e ha localizado, La bobina Li se puede fabricar con 4-0 6 vueltas de alambre en
formaleta de VB". t
TRANSMISOR DE RASTREO DE 1.5 VOLTIOS:
Con ei.circulto invegrado LM3209 ve produce la seMal de rastneo en este pequetto transmicor, qu
puede fabricar de un tama muy reducido, utilizando una bateria tipo moneda,
30 Hisctréniea 6 Computadores » CBR
Automatizacién casera. El sistema X-10. Parte 4
yi
[Og
En el sistema X-10, Ta verdadera automatizacién se va configurando cuando se involucran
elementos como el teléfono 0 el computador personal para controlar los diferentes médulos y
aparalos conectados a ellos. En este articulo, vamos a conocer algunos de estos sistemas
que hacen de esta tecnologia una verdadera novedad.
1 os articutos anteriores
hemos visto la funcién de
los diferentes médulos re-
ceptores y transmisores X-10. En esta
cocasién vamos a conocer las caracte-
-as de algunos aparatos que hacen
deste sistema algo muy versatil y po-
eroso ya que se involuera el control a
distancia por medio del sistema telef6-
nico y el control por computadorlo que
Teva dando el verdadero matiz de auto-
‘matizacién casera que se ka anunciado
desde el comienzo de esta serie,
Control por teléfono
El sistema de comunicacién por telé-
fono es alge que proporciona innume-
tables posibilidades de control automa
tico de aparatos a distancia ya que casi
no hay un lugar en el mundo que no
esté conectado por este medio, y aho-
ra con la tecnologia del teléfono celu-
lar, las posibilidades son mucho mas
amplias. Desde que se implants el sis-
tema de marcacién por tonos (Dual
‘Tone Multi Frequency o DTMP). (Ver
artfculo " Beeper Telefénico”en la Re-
vista Blectrénica y Computadores No.
66) se han facilitado enormemente es-
tas posibilidades,
‘Floctrénice « Computadores « CHKCET
Feure GonzAtez G.
El sistema X-10 por lo tanto, no
podria estarasjeno aesta posibilidad téc-
nica y se han desarrollado varios apa
ratos que permiten manejar un sistema
de médulos X-10 a través de la linea
telefénica. Dentro de los mas conoci-
dos estn el "Telephone Responder” de
PowerHlouse, el “Telephone Transpon-
der” de Leviton y el “TeleCommand
‘System 109" de IDS Technologies cu-
yas principales caracterfsticas veremos
‘acontinuacién,
Telephone Responder
Este es un controlador que se conecta
en un tomacorriente comin de 120 Vol-
tios y a una salida telefonica normal,
Tomacortiente
120 VAC
figura | y puede manejar hasta 10 mé-
dulos X-10, Cuando se hace una Ilae
mada desde cualquier lugar del mun
do por medio de un teléfono de tonos,
el controlador contesta la llamada y
después de un tiempo de 30 a 35 se-
‘gundos emite tres tonos 0 “beeps” para
indicar que el aparato tiene el conteol
del sistema, Una ver activado, se ma-
rgjan los médulos por medio del ¥o-
lado del reléfono asf: Los digitos 1 a
9 representan los Unit Codes 1 a9 yel
0 representa ef Unit Code 0 médulo
NNo.10. Una ver. que se ta indicado el
‘imero, se utiliza la tecla * para el co-
‘mando ON (encender) y la tecla # para
el comando OFF (apagar).
Toma
Telephone Responder
ura 1. Conexién de una intertace X-10 para teléfono
31
TECNOLOGIA
Figura 2. Interface Telephone Responder
Se puede establecer un cddigo de
seguridad hasta de tres digitos lo que
dda una posibitidad de tener 1000 e6di-
05 diferentes. El sistema también se
puede configurar para que encienda en
forma intermitente alguna kimpata 0
haga sonar un médulo de timbre 0
“Chime module” evando suena el te-
leéfono Jo que puede ser dtil para tos
diseapacitados.
Este méslulo tiene también un te-
clade que lo habilita como control ma-
nual con ocho botones que tienen las
funciones ON/OFF, DIW/SRIGHT.
ALL LIGHTS ON/ALL, OFF. Su co-
nexign no afecta el funcionamiento
normal de tekéfon0 cuando se esté en
ta easa ya que se desactiva automii-
camente cuando se deseuelga el aur
cular. Cuando hay contestador telefé
nico, tiene un interruptor que seleccio-
na modo norma! o modo contestador
por medio del cual se ignora el con-
testadory se pueden activar fos coman-
dios correspondientes. Ela figura 2 se
puede observar el aspecto fisica de este
controle,
Dentro de las posibles aplicacio-
nes de este controlador telefénico
cestin: Encertder 6 apagar lau:
nas luces o aparatos que se
hayan olvidado cuando salié
de la casa, crear una situacién
de presencia desde un [ugar
remoto pata “despistar” posi-
bles tadrones, si no puede estar a
tiempo a la casa se puede activar el
aire acondicionado antes de llegar.
encender una olla de fuego lento
que se ha dejado preparada y tener
el almuerzo 0 comida fista cuando
32
Heguemos a la casa, envender 0 apa-
‘gar un sisteina de riego a determinada
hora desde cualquier sitio, encender las
luces exteriores antes de Hegar a la
casa, ete. ete
Telephone Transponder
Exe dispositive, euyo aspectofisico se
quede ver en la figura 3, le permite a
tun usuario controlar hasta 256 médu-
los X-10 desde cuslquier sitio remoto
por medio de un teléfono de tonos,
Recibe, por medio del teclado, las 6r-
denes 0 comandos ON/OFF y ALL
LIGHTS ON/ALL OFE, Una de sus
funciones mas interesantes es la del
control teleFénico local. Por medio de
esta funcién, se puede utilizar cual-
‘quier extensin det sistema teletnico
interno y aim ws teléfono inakimbricn,
como elemento de control de cusiquiet
-médulo del sistema,
‘iene otras funciones como la de
tun par de contactos aislados de bajo
voltaje (ary contact) que se puede ac~
tivar desde cualquier teléfono o desde
Figura 3. Interface Telephone Transponder
cualquier ransmisor interno para rea:
lizar alguna funcién auxiliar como es
cender un termostato, por ejemplo.
También tiene la posibilidad de cog
ficar su uilizacin para preven el use
Indiseriminado o sin autorizacisn, Orme
funcién muy interesante es fade
firmacién de comando la cual se reek
be por medio de uns voz femenina si
rmulada. Su conexi6n es muy féeil ye
‘que pot un lado se conceta a la red ele
trica de 120 V y por el otro a un tome
telefénico normal.
TeleCommand System 100
‘Cuardo de funcionessofistcadas se tse
ta,este uparaco le brings aun sistem N-
{0 una gran versaiidad y mayors po=
siilidades de automatzacion y consol
que os dos sistomas anteriores. Esteopse
rato cuyo aspecto se muestra en fae
14, permite el contol telefénieo, mise
cando dos mimeros en el teclado ds
telefono de tonos, de cualquier sparasa
eléetrico desde las luces intemas y ex
temas, eleetrodomésticos, armas, com
putadores, sie aconcionado, abrepe=
tas, calentadores de agut, cquipos de
audio y video, sistemas de riee0, aque
1s de oficna, motores, bombas ee
Este sistema viene preprogramade
desde la Fabrica y puede ser reprogra:
‘mado ain por teléfono, si se desea, pars
cambiar los cédigos de acceso, las res
trieciones y los pardmetros de operucin
{y es compile con todas las princlpas
les marcas de médulos X-10 disponi-=
bles en el mercado. Lat programacién
se almacena en una memoria no wolétit
de tal forma que no se pierde cuande
hay fallas de enengia.
‘Su conexién es también muy fie
or un lado un eable de alimentacién =
tun tomacorriente de 120 V de donde toms
la energia y ala ver entrega los eddigos
X-10 ala red para controlar tos mSdulog
conectados al sistem y por el OW, ut
cable telefénico comin por donde r=
ibe las seales desde cualquier
teléfono. En fa figura 5 se pus
de yer una configuracién tpi=
‘cacon este sistema, Su operas
cidn es simple: un comands:
se activa inicialmente con la tecle
* para ON y la tecla # para OFF
seguido de dos digivos que indican
Bactrénica « Computateres + Cameche
Automatizacién casera. El sistema X-10. Parte 4
el Howse Code de la Aa tay los Unit
Codes representadas por las teclas | a
9, E10 representa ALL para todos
médulos. Si se deja presionado el i
mo digito, se activa la funcién DIM/
BRIGHT. Los comandos pueden alma-
cenarse y crear macros con ells (va-
rias funciones con una sole tecla) uti-
lizando las funciones de memoria de
ue disponen algunos telgfonos. Si se
almacena una serie de comandos en lu-
gar dé un niimero teleféinico, con un
solo botén se pueden apagar todas las
luces, desconectar el aire acondiciona-
do y activar el sistema de alarma antes
de acostarse, por ejemplo.
Esta aparato también tiene una
funcién de Intercom 0 intetcomunica-
dor que convierte el sistema teleféni-
co casero en un intercomunicador uti-
lizando las diferentes extensiones de
la casa. Cuando se levanta un euricu-
lar de una extensidn y se marca el nt
Toma
de teléfono
Figura 5. Conexiones del sistama Talecommand 100
Bectrénica a Computedores « CANCE
mero “OI”, todas las extensiones se
desconectan del sis(emma extemo y se
pueden comunicar entre si, Este siste-
ma tiene Ia forma de establecer dos
c&digos de acceso y puede trabajar si-
‘multineamente con contestadores au-
tomiticos a los cuales desactiva cuan-
do se utiliza como control remoto,
Cableado existente
Figura 4. Sistema Telecommand 100
Sistema Telecommand 100
Como hemos visto, los sistemas
de control telefénico le agregan al
sistema X-10 grandes capacidades de
automatizacién y versatilidad al po-
der operarlos desde cualquier sitio
con unas conexiones y modos de ope-
racign muy ficiles de realizar por
‘cualquier persona.
Tomacorriente
120 VAG
Médulos,
remotos
S X10
TECNOLOGIA
Automatizacién
casera por computador
Para tener una fincidn compl
matizacién se neque que bi
‘mento la proporcioae. Enel
J automatizacigin ease, nada mis apro~
pido «que wn computador personal part
huoerlo, El desumolte de fa tenologia de
los mieroporcesadoves y kl computor
personal, dese fs aos 70 hast la Fecha,
fa proporcionada mis cambios tenol6-
‘alos en la vida del hombre que cuakuiar
‘tro invento en sa historia, Cuando conee:
amos un conjunto X-10 formado por los
diferentes méxtulos que hemos visto, el
sistema telefénico, un cumpatador perso-
nal con su tespectiva interface y un pro
‘arama adecuado, enemos unt Cerdadero
sistent de autonttizacion easera con un
poder de control y maniobaa sélo Timita-
do a nuesia imaginacisa,
Este sistema peed complermentse
con una caja de adguisicin de dito y
ses respeetives sensores de temperatir,
ti bz fe ici, presen
ci. ete, coninigndofoen on cena
tronico con expacidad de contol elas
las variables posibiexenun recint yasea
de habitacion oe tata, com ot Fin be
eatablece fs ado dims de trabajo
de tecos los aparatos involucrin en el
sistema por ograr an shorn miximo de
cnergia, por cjemplo, oun modo de vida
endonde se simplificv al maximo lauren
repattiva do operacign de es10s aparatos
dejo of ernpo fibre para ots tres
ris agardablesy conse
Hay diferentes formas de imple-
mentar un sistema ile autonratizacién
casera computarizad, Uno de ellus es
34
Figura 6. Elementos basicos
del control X-10 con PC
Software
Interface
X10 para
PC
§|
el Hamado off-line en donde se uit
zxel computador sélo para programa
Ta accién de los médulos a través de
tun controktdor que almacena el pro-
sgrama y luego se desconecta pars tti-
lizarse en otras tareas. Otro sistema y
que es el mais completo, es ayuel que
se llama de controf dedicado en don-
dle el computador asume totalmente
Ins tareas de automatizacion durante
las 24 horas del dia y no se utiliza para
otras labores
Esto se puede hacer con un com-
pputudor que hayamos reemplazado por
lun modelo mis nuevo, Esto es posible
‘ya que para [as funciones de automati-
acid casera no se requiere del titimo
‘modelo y con unas eapacidades nonmna-
les de memoria RAM, disco duro, etc.
se puedien lograr funciones de automa-
tizacibn muy poderosas. Asi que con
esta aplicacisn ya tiene un buen uso
para ese computador por el que nadie
le ofrece mucho dinero cuando lo quie.
ra vender y se pregunta; ;Y ahora que
hhago con él ?
En Ia figura 6 tenemos un siste~
‘mu bisico de control X-10 computa-
izado en donde tenemos como ele-
mentos principales ademis del com-
putador y los médalos X-10, la inter-
face y ei programa que permite con-
figurar todo el sistema. La interface
se encarga de llevar las drdenes 0 co-
-mandos desde el computador hacia los
médulos y se encuentran diferentes
modelos en el mereado dependiendo
de la complejidad que se requiera
‘Vamos ahora a conocer las interfaces
¥y programas mis populares.
interface
Home Automation CP 290
Esta es la interface mas sencillay
mica, figura 7, y trbaja en el mode
Tine 0 en modo desicado y se e
cenel mereado hace varios aiios Senda
muy popular, Se conecta ficitments:
cutlquier puerto serial RS-232 ya sea:
un computador tipo PC © Macincosi
recite las setales de diferentes
Bisicamente, se trata de un tempor
programable que puede accesarhasta 25
madillos X-10 (16 House Codesy 16)
Codes), Se pueden programar dire
eventos de tiempo para diferentes
se pueden almacenar husta 128 ever
temporizacios.
‘Unevento programado puede
var hasta 16 aparatos con el mi
House Code para que se enciendan
spaguen a una determinada hora en
diao dias particulates. Pambi
de programa la cantidad de Ine 0 bel
dd los médulos de kimparas. Por ej
plo: Que los médulos A1,A4,A7 yA
se enciendan a las 7:30 PM y que
dias Lunes, Migrooles y Viernes tea
Jenal 40% de Ia iluminacién, todo p
sramado como un solo evento,
La interface tiene su propio reo)
tiempo real, y con una bateria aleai
de 9 V instalada en su interior, pe
almicenar el programa hasta 100 he
ras Tiene ocho interruptores de ba
cin en su parte superior que permite
activacién manual de los primeros oc
rédulos climinando las acciones 6
programa asf la interface esté 0 no ee
nectada at computador. En el rx
articulo veremes otras interfaces p
computador y os diferentes prog
que se utilizan para manejarlas. 6
Figura 7. Interface Home Autor
es)
Hlectréaica a Computadares + ©
‘TECNOLOGIA __
El software
EMS VLE
para simulacion del motor jaula de arditla
no de los motores mis
preferidos en la industria
esl motor asinerono tri-
fiisico en su version de jaula de ardill
conocido generalmente como el motor
de induccién jaula de ard. Casi siem-
pre se ha considerado e! motor de i
duccién jaula de ardilla como un motor
de velocidad constante y en consecuen-
cia se ha utilizado para aecionar cargas
que requieren una velocidad coustante,
tales el caso de bombus, bandas trans.
portadoras, ventiladores, etc.
Como actuslmente muchos proce-
0s industrales requieren velocidad
variable, se han aprovechado las venta-
{as de este motor desarrolando méto-
dis para controlar su velocidad, Vate la
pena mencionar de pasada el método de
polos consecuentes, el de amplitud de
polos, el de variacin dela frecuencia
yelde ajuses en el voltae de entrada,
‘Aun mds, los adelantos en
electténica de potencia,entzo- |
ria de controle informética han
dotado a a industria de fuentes
ddevollajey frecuencia variables
Jogrindose una varacién de ve-
Jocidad bastante fina por pare
de dicho motor y haciendo que
cobre mayor auge. Estaexcelen-
te aplicacion se logra bisica-
mente con variadores de voltaje
y frecuencia
36
ote,
JORGE JUAN GumeRREZ GRANADA
rolesor Mular
Universidad Tecnolégica de Pereira
Ayano AnceL Orozco GuTiéARez
Profesor Auxlar
Universidad Tecnolégica de Pereira
Es porestasy otras razones que co-
imiinmente el motor de induecién jaula
de ardilla viene ocupando un puesto de
caballo de batalla en Ia industria tradi-
ional y estéjugando en estos momen
tos su papel estelar en la autonnatizaci6n
Industrial hacia la optimizacibn de Ia ma
nufactura,
Configuracién
del motor jaula de Ardilla
La esiraciura tradicional del motor de
\duccidn jaula de asdilla es Ya vomin
2 todos los tipos de miquinas girato-
rigs: una estructura extemaen forma de
Cilindro hueco denominada estator y
disefada adecuadamente para alojar los
devanados del motor, una estructura
interna o rotor similar a un cilindro
macizo, coneénirica con el estator y
atravesada axiulmente por el eje del
motor yun espacio entre ambas estruc-
turas conocida como entrehierro; todo
cuberto por una envoltura 0 carcasa
Figura 1. Circuito equivalente de una face de un
Motor de induccién tritésico jaula de ardilla
rh heen to
testator se construye de mings
‘material magnético de muy buenas
dies, se apilan una tras de ota
por un buen aisiante. Ess chapas
ramuradas en superiferia de tal modo
‘el conjunto de elas forma una especie
cilindro hueco con caminos aisles en
petferia interna denominados
te ranurs, Sobre estas ranurs se aoja
You might also like
- 2-5G Network ArchDocument48 pages2-5G Network ArchDaniel CafuNo ratings yet
- Clase 9Document2 pagesClase 9Daniel CafuNo ratings yet
- TesteDinDocument1 pageTesteDinDaniel CafuNo ratings yet
- 3-Options For Inter-VLAN Routing - Implementing and Administering Cisco SolutionsDocument9 pages3-Options For Inter-VLAN Routing - Implementing and Administering Cisco SolutionsDaniel CafuNo ratings yet
- 7-CEF LAB TimeDocument3 pages7-CEF LAB TimeDaniel CafuNo ratings yet
- 1-IntroDocument15 pages1-IntroDaniel CafuNo ratings yet
- BGP Confederation Lab:: R1 Basic ConfigurationDocument4 pagesBGP Confederation Lab:: R1 Basic ConfigurationDaniel CafuNo ratings yet
- Hautes: FrequeDocument132 pagesHautes: FrequeDaniel CafuNo ratings yet
- Experiment #4 Am Modulator and Power Amplifier: C M Usb LSBDocument8 pagesExperiment #4 Am Modulator and Power Amplifier: C M Usb LSBDaniel CafuNo ratings yet
- Experiment #1 Audio MonitorDocument7 pagesExperiment #1 Audio MonitorDaniel CafuNo ratings yet
- Cisco 5G TransportDocument30 pagesCisco 5G TransportDaniel CafuNo ratings yet
- Experiment #2 Carrier Oscillator: C1 C4 0.1 Uf L1Document6 pagesExperiment #2 Carrier Oscillator: C1 C4 0.1 Uf L1Daniel CafuNo ratings yet
- Concepts That Are Being Applied and The Results That Should Logically Be ObtainedDocument1 pageConcepts That Are Being Applied and The Results That Should Logically Be ObtainedDaniel CafuNo ratings yet
- 4-Configure A Router On A Stick - Implementing and Administering Cisco SolutionsDocument20 pages4-Configure A Router On A Stick - Implementing and Administering Cisco SolutionsDaniel CafuNo ratings yet
- Experiment #3 Buffer Amplifier: R8 22K U1 LM318 C6 0.1 Uf C5 0.1 Uf C7 0.1 UfDocument9 pagesExperiment #3 Buffer Amplifier: R8 22K U1 LM318 C6 0.1 Uf C5 0.1 Uf C7 0.1 UfDaniel Cafu100% (1)
- Bíblia Dake - 1 Tessalonicenses PDFDocument10 pagesBíblia Dake - 1 Tessalonicenses PDFDaniel CafuNo ratings yet
- OriginalDocument26 pagesOriginalDaniel CafuNo ratings yet
- 09 02 Local Area Network Layer 2 EthernetDocument9 pages09 02 Local Area Network Layer 2 EthernetMurali DarenNo ratings yet
- Bíblia Dake - 1 Pedro PDFDocument11 pagesBíblia Dake - 1 Pedro PDFDaniel CafuNo ratings yet
- Bíblia Dake - 1 JoãoDocument12 pagesBíblia Dake - 1 JoãoJairo Rafael GarciaNo ratings yet
- Tutorial ModeloDocument2 pagesTutorial ModeloDaniel CafuNo ratings yet
- 3 Verification PDFDocument1 page3 Verification PDFDaniel CafuNo ratings yet
- User Guide &: SocialtradingDocument22 pagesUser Guide &: SocialtradingDaniel CafuNo ratings yet
- Bíblia Dake - 1 Timóteo PDFDocument11 pagesBíblia Dake - 1 Timóteo PDFDaniel CafuNo ratings yet
- Digitalizar0033 - 1 CorintiosDocument29 pagesDigitalizar0033 - 1 CorintiosPr-Willy RíchardNo ratings yet
- OriginalDocument53 pagesOriginalDaniel CafuNo ratings yet
- Packet Tracer Installation Notes and FAQ - Flackbox PDFDocument6 pagesPacket Tracer Installation Notes and FAQ - Flackbox PDFDaniel CafuNo ratings yet
- Apprendre L' Electronique en Partant de Zéro - Niveau 1 - Leçons 01 À 28Document297 pagesApprendre L' Electronique en Partant de Zéro - Niveau 1 - Leçons 01 À 28fantikomed100% (2)
- 3 Verification PDFDocument1 page3 Verification PDFDaniel CafuNo ratings yet
- Discover Activity: SocialtradingDocument21 pagesDiscover Activity: SocialtradingDaniel CafuNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)