You might also like
- Lectura Semana 4 Dinamica EstructuralDocument22 pagesLectura Semana 4 Dinamica Estructuraljuan carlos jimenezNo ratings yet
- SISMO 7 Ec - Estado 2015Document7 pagesSISMO 7 Ec - Estado 2015shipegolNo ratings yet
- Examen Final Dinamica EstructuralDocument2 pagesExamen Final Dinamica Estructuraljuan carlos jimenezNo ratings yet
- Apuntes de Ingeniería Antisísmica PDFDocument121 pagesApuntes de Ingeniería Antisísmica PDFignacioNo ratings yet
- Cortante Basal y Espectro de DiseñoDocument16 pagesCortante Basal y Espectro de DiseñoJosé Sebastián BustamanteNo ratings yet
- Espectro TripartitaDocument3 pagesEspectro TripartitaEnriqueNo ratings yet
- Vibración Exitaciones Dinámicas Generales-DuhamelDocument37 pagesVibración Exitaciones Dinámicas Generales-DuhamelJoan Loayza100% (2)
- Respuesta dinámica sistemas 1 GDLDocument16 pagesRespuesta dinámica sistemas 1 GDLJuan CasoNo ratings yet
- Analisis Tiempo HistoriaDocument7 pagesAnalisis Tiempo HistoriaBRANDONNo ratings yet
- Analisis Tiempo Historia No LinealDocument24 pagesAnalisis Tiempo Historia No Linealdannyjhuta100% (2)
- Dinamica EstructuralDocument37 pagesDinamica EstructuralCARLOS ALEJANDRO CABALLA OLIVARESNo ratings yet
- Analisis Dinamico Modal Vs Tiempo HistoriaDocument4 pagesAnalisis Dinamico Modal Vs Tiempo HistoriaErick Jorge Cardozo Cuenca100% (1)
- Sistema de un solo grado de libertad: ecuaciones de movimiento armónico forzadoDocument4 pagesSistema de un solo grado de libertad: ecuaciones de movimiento armónico forzadoAngel Alonso Marcos GamboaNo ratings yet
- 1civ25 Ame - T6 2019-1Document5 pages1civ25 Ame - T6 2019-1Paul EscamiloNo ratings yet
- Trabajo Final - Medios ContinuosDocument37 pagesTrabajo Final - Medios ContinuosCésar Alvarado100% (1)
- Dimensionamiento de Elementos Estructurales - Ing Carlos IralaDocument15 pagesDimensionamiento de Elementos Estructurales - Ing Carlos IralaMisaicoSairitupacKevinNo ratings yet
- Resolución de examen de unidad sobre diseño sismo resistenteDocument3 pagesResolución de examen de unidad sobre diseño sismo resistente1yagami1100% (2)
- Porticos 3DDocument37 pagesPorticos 3DJulio Aguilar ChaniniNo ratings yet
- Cap.6-1 Respuesta InelasticaDocument12 pagesCap.6-1 Respuesta InelasticaJuan Carlos JimenezNo ratings yet
- Dinámica de Estructuras - Tarea #2 sobre problemas de vibraciones transitorias y armónicasDocument3 pagesDinámica de Estructuras - Tarea #2 sobre problemas de vibraciones transitorias y armónicasMario PinoNo ratings yet
- Problemas 1Document5 pagesProblemas 1Oscar AbudNo ratings yet
- 5) Modelo Mecanico de HousnerDocument8 pages5) Modelo Mecanico de HousnerGustavoAntonioNailRamirez100% (1)
- Metodo de Newmark y HoltzenDocument3 pagesMetodo de Newmark y HoltzenOswaldo Yv100% (1)
- Informe Analisis No-Lineal PushoverDocument17 pagesInforme Analisis No-Lineal PushoverFredy Omar Caraballo AlvarezNo ratings yet
- Integral de DuhamelDocument14 pagesIntegral de DuhamelAlex Guerrero CelmiNo ratings yet
- Taller #01 Dinamica Estructural (Especializacion)Document2 pagesTaller #01 Dinamica Estructural (Especializacion)Eliana Arango PérezNo ratings yet
- Universidad Peruana Los Andes: Practica Calificada N°02Document2 pagesUniversidad Peruana Los Andes: Practica Calificada N°02MARCOS JOSUE RUPAY VARGASNo ratings yet
- Problemas Resueltos de Rigidez Lateral en Sap2000Document15 pagesProblemas Resueltos de Rigidez Lateral en Sap2000RodolfoCondor100% (3)
- Exs2013 2UNIDocument3 pagesExs2013 2UNImarcosNo ratings yet
- Diseno de Zapatas Aisladas Con Carga BiaxialDocument66 pagesDiseno de Zapatas Aisladas Con Carga Biaxialhenry100% (2)
- Ejemplo S Integral de DuhamelDocument7 pagesEjemplo S Integral de DuhamelJhonny Espinoza Huaman100% (1)
- INGENIERIA SISMO RESISTENTE EXAMEN Parcial 2020 - 01Document6 pagesINGENIERIA SISMO RESISTENTE EXAMEN Parcial 2020 - 01christian ricaldiNo ratings yet
- 1civ25 Ame - Ex2 2020-1Document6 pages1civ25 Ame - Ex2 2020-1Jhon Cano NalverteNo ratings yet
- Problemas Pique ResueltosDocument9 pagesProblemas Pique ResueltosLeticia MirezNo ratings yet
- Tarea 7 Dinamica Estructural 202010Document1 pageTarea 7 Dinamica Estructural 202010José Carlos Padilla LoboNo ratings yet
- Analisis Estructural IIDocument5 pagesAnalisis Estructural IIJIMMY_3788No ratings yet
- Cálculo Numérico Integral de Duhamel Sistema Sin Amortiguación.Document8 pagesCálculo Numérico Integral de Duhamel Sistema Sin Amortiguación.j-balderasNo ratings yet
- Preguntas Primer ExamenDocument3 pagesPreguntas Primer ExamenStivieAaronHuallpaBordaNo ratings yet
- Predimensionamiento de Vigas y ColumnasDocument5 pagesPredimensionamiento de Vigas y ColumnasRuso Kgb100% (1)
- Método de Wilbur, Stodola y HolzerDocument3 pagesMétodo de Wilbur, Stodola y HolzerVictor Diaz YepezNo ratings yet
- Métodos numéricos para resolver sistemas de ecuaciones linealesDocument10 pagesMétodos numéricos para resolver sistemas de ecuaciones linealesLexNo ratings yet
- Tarea 01-ConcretoDocument21 pagesTarea 01-ConcretoGlenda Linaja GarcíaNo ratings yet
- Simulación Matemática de Yacimientos TAREA 5Document6 pagesSimulación Matemática de Yacimientos TAREA 5DianaFlomoNo ratings yet
- Ejercicios Resueltos Control AutomáticoDocument13 pagesEjercicios Resueltos Control AutomáticoMariano IanniNo ratings yet
- Examen Parcial 3Document13 pagesExamen Parcial 3Alexander CisnerosNo ratings yet
- Ejercicios-Teoria-Control G1 N4 PDFDocument19 pagesEjercicios-Teoria-Control G1 N4 PDFMAYRA PUEDMAGNo ratings yet
- Capitulo 4Document23 pagesCapitulo 4Yecid MauricioNo ratings yet
- Presentación U3Document17 pagesPresentación U3Gustavo TellezNo ratings yet
- Articulo DosDocument25 pagesArticulo DosIsabel LastraNo ratings yet
- Sol - Practica 1 2-2020 Elt 2692Document15 pagesSol - Practica 1 2-2020 Elt 2692Gonzalo Rodrigo Torrico Gutiérrez100% (1)
- Cinética Del Cuerpo Rígido en 3DDocument8 pagesCinética Del Cuerpo Rígido en 3DGUSTAVO ALEX DOMINGUEZ JARAMILLONo ratings yet
- Resumen ChopraDocument19 pagesResumen ChopraCarlos Alberto Leyva GiraldoNo ratings yet
- Control Trabajo2019Document12 pagesControl Trabajo2019Evelin JacoboNo ratings yet
- Tutoria15722961 PDFDocument19 pagesTutoria15722961 PDFCarla Garcia EsquivaNo ratings yet
- Taller 1 CinéticaDocument8 pagesTaller 1 CinéticaSamira JaimenNo ratings yet
- Vibracion Forzada GeneralDocument24 pagesVibracion Forzada GeneralMiguel Angel Rodriguez ValverdeNo ratings yet
- Teoria de Elementos de Vibracion Apendice ADocument36 pagesTeoria de Elementos de Vibracion Apendice AYahir VillanuevaNo ratings yet
- Ecuación de Euler consumo con capital humanoDocument10 pagesEcuación de Euler consumo con capital humanoRonaldPortugalNo ratings yet
- Metrado Acometidas Zona MDocument10 pagesMetrado Acometidas Zona Mpanda_pxdNo ratings yet
- PRF-004-MOQ20 - Municipalidad Moquegua - Adoquin 420 (20X10X8) MOQUEGUADocument3 pagesPRF-004-MOQ20 - Municipalidad Moquegua - Adoquin 420 (20X10X8) MOQUEGUApanda_pxdNo ratings yet
- Herramienta Expedientes TecnicoDocument55 pagesHerramienta Expedientes Tecnicoyeni burga garciaNo ratings yet
- Programacion MultianualDocument50 pagesProgramacion MultianualIVANCITOSEBASTIANNo ratings yet
- SegundoModulo PDFDocument20 pagesSegundoModulo PDFbrallan_garNo ratings yet
- Presupuesto General-Primer Cambio Sin Nada PlanDocument28 pagesPresupuesto General-Primer Cambio Sin Nada Planpanda_pxdNo ratings yet
- Presupuesto GeneralDocument33 pagesPresupuesto Generalpanda_pxdNo ratings yet
- Ix Convencion Macrorregional Invierte - Pe Karla GaviñoDocument30 pagesIx Convencion Macrorregional Invierte - Pe Karla GaviñoLeonardo Pariona FloresNo ratings yet
- Analisis de Precios Unitarios Rev1Document17 pagesAnalisis de Precios Unitarios Rev1Dario BozaNo ratings yet
- Precios Actualizados 28-05-2019Document210 pagesPrecios Actualizados 28-05-2019panda_pxdNo ratings yet
- Invierte Pe PDFDocument13 pagesInvierte Pe PDFEber Cconislla ChacmanaNo ratings yet
- Alternativa de SolucionDocument1 pageAlternativa de Solucionpanda_pxdNo ratings yet
- 0 SeparadoresDocument11 pages0 Separadorespanda_pxdNo ratings yet
- RD 005-06 Snip AnexDocument14 pagesRD 005-06 Snip AnexTony PLNo ratings yet
- Solicitud Certificación Ambiental Mejoramiento Transitabilidad MoqueguaDocument6 pagesSolicitud Certificación Ambiental Mejoramiento Transitabilidad Moqueguapanda_pxd100% (1)
- Modelo de EncuestaDocument2 pagesModelo de Encuestapanda_pxdNo ratings yet
- Modulo Diseño de PavimentosDocument111 pagesModulo Diseño de PavimentosAlejandro Bravo100% (1)
- Pavimento FlexibleDocument16 pagesPavimento FlexibleCyndy KasaNo ratings yet
- Padron de Usuarios Chen ChenDocument136 pagesPadron de Usuarios Chen Chenpanda_pxdNo ratings yet
- Examen HIDRAULICA ResueltoDocument3 pagesExamen HIDRAULICA Resueltopanda_pxdNo ratings yet
- Informe Suelos y Pavimentos (I)Document32 pagesInforme Suelos y Pavimentos (I)Royer Hurtado CcorahuaNo ratings yet
- Una Guía Paso Por Paso Sobre El Proceso de Construir Una CasaDocument6 pagesUna Guía Paso Por Paso Sobre El Proceso de Construir Una Casapanda_pxdNo ratings yet
- Paviemnto AsfaltoDocument27 pagesPaviemnto Asfaltopanda_pxdNo ratings yet
- Padron de Usuarios Chen ChenDocument150 pagesPadron de Usuarios Chen Chenpanda_pxdNo ratings yet
- Pruebas HidraulicasDocument1 pagePruebas Hidraulicaspanda_pxdNo ratings yet
- Slurry SealDocument35 pagesSlurry SealOnce Xi100% (2)
- Esfuerzos y deformaciones en pavimentos asfálticosDocument86 pagesEsfuerzos y deformaciones en pavimentos asfálticosFabián Ganzhi FajardoNo ratings yet
- Estruc DinamDocument80 pagesEstruc DinamJorge Eduardo GuillénNo ratings yet
- 401.a Imprimación AsfálticaDocument8 pages401.a Imprimación AsfálticaJose Luis Mattos TarquiNo ratings yet
- Mezcla Asfaltica en CalienteDocument50 pagesMezcla Asfaltica en CalienteCésar Augusto Sánchez ChiletNo ratings yet
- Sgsso Pts 01 DemolicionesDocument10 pagesSgsso Pts 01 Demolicionesgabriela jaraNo ratings yet
- Energia en El MundoDocument19 pagesEnergia en El MundoSam CastilloNo ratings yet
- Reporte Lab Fisi3 S10.Document6 pagesReporte Lab Fisi3 S10.Angui RomanNo ratings yet
- Volumetría Ácido BaseDocument21 pagesVolumetría Ácido BaseDiana Caroline Arevalo VelaNo ratings yet
- Introduccion GeodesiaDocument29 pagesIntroduccion GeodesiaDANIELNo ratings yet
- Informe Procedimiento Karl FisherDocument7 pagesInforme Procedimiento Karl FisherALEXANDER NIETO TORRESNo ratings yet
- Electrostatica Fisica IiDocument11 pagesElectrostatica Fisica IiAnthony Ambilla laureanoNo ratings yet
- Métodos de Esterilización FísicosDocument15 pagesMétodos de Esterilización FísicosCaroline JaramilloNo ratings yet
- CatalogoCONSTRULITA2019vol 1 File020803695 PDFDocument232 pagesCatalogoCONSTRULITA2019vol 1 File020803695 PDFalberto0% (1)
- Introducción a la Física: Magnitudes, Unidades y Sistema Internacional (SIDocument5 pagesIntroducción a la Física: Magnitudes, Unidades y Sistema Internacional (SIWilderAlexanderMCNo ratings yet
- Guia 1 Fisica 2017-1Document5 pagesGuia 1 Fisica 2017-1LuisGutierrezNo ratings yet
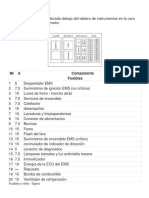
- Diagrama de Fusibles Caterham SevenDocument4 pagesDiagrama de Fusibles Caterham SevenEDUARDo GILNo ratings yet
- Essex Furukawa Datasheet Ultrashield Plus 36C SpanishDocument2 pagesEssex Furukawa Datasheet Ultrashield Plus 36C SpanishRESERNo ratings yet
- Arriostre de CorreasDocument22 pagesArriostre de CorreasXfridx CarrascoNo ratings yet
- Sensores de Humedad FinalDocument53 pagesSensores de Humedad FinalManuel GutierrezNo ratings yet
- Vectores y Sus TransformaciónDocument11 pagesVectores y Sus TransformaciónLuis IlbayNo ratings yet
- Falla de PresasDocument5 pagesFalla de PresasHector Gutierrez JaraNo ratings yet
- Anual San Marcos - Trigonometría Semana 11Document16 pagesAnual San Marcos - Trigonometría Semana 11Daniel TorresNo ratings yet
- Conceptos geométricos fundamentales para agrimensuraDocument4 pagesConceptos geométricos fundamentales para agrimensuraDenia P. Peralta100% (1)
- Práctica 2 ElectromagnetismoDocument6 pagesPráctica 2 ElectromagnetismoFRANCO CHAVEZ MARTINEZNo ratings yet
- Torre Einstein - Grupo 3 Historia IIDocument5 pagesTorre Einstein - Grupo 3 Historia IIValeria ChafloqueNo ratings yet
- Cálculo de ÁreaDocument12 pagesCálculo de ÁreaDenise A Medina MosqueraNo ratings yet
- Tema 3 - ACTIVIDADES SUSTANCIAS PURASDocument6 pagesTema 3 - ACTIVIDADES SUSTANCIAS PURASYani 2001No ratings yet
- Trabajo CimentacionDocument37 pagesTrabajo Cimentacioncarlos lizarraga floresNo ratings yet
- Checklist Condiciones BásicasDocument15 pagesChecklist Condiciones Básicasjulio espinoNo ratings yet
- 9.-Bloque 3 y 4 Guia de Teoria - Fis 1Document4 pages9.-Bloque 3 y 4 Guia de Teoria - Fis 1Viridiana Guadalupe Hernandez CancheNo ratings yet
- Cuestionario Siderurgia y Metalurgia Cap. 01 - ALEJANDRO JIMENEZ ZEPEDADocument5 pagesCuestionario Siderurgia y Metalurgia Cap. 01 - ALEJANDRO JIMENEZ ZEPEDARafael Alejandro Jimenez ZepedaNo ratings yet
- ECU.4 (Método de Los Operadores)Document27 pagesECU.4 (Método de Los Operadores)AmatistaCieloNo ratings yet
- Informe de Focos LedsDocument27 pagesInforme de Focos LedsJoan Flavio Campos NureñaNo ratings yet
- Ejercicios ConduccionDocument8 pagesEjercicios ConduccionDescargasNo ratings yet