You might also like
- Scilab Textbook Companion for Modern Digital ElectronicsDocument92 pagesScilab Textbook Companion for Modern Digital ElectronicsIshan Kumar KalerNo ratings yet
- Model-Based Processing: An Applied Subspace Identification ApproachFrom EverandModel-Based Processing: An Applied Subspace Identification ApproachNo ratings yet
- (Scilab Textbook) Electric Power Distribution System Engineering - T. GonenDocument147 pages(Scilab Textbook) Electric Power Distribution System Engineering - T. GonenLuis CamargoNo ratings yet
- Switching Power Supply Design - EMIDocument95 pagesSwitching Power Supply Design - EMIteja0% (1)
- PCB Designing - Awais YasinDocument163 pagesPCB Designing - Awais Yasinnasim_majoka803No ratings yet
- Open Source Business Models 2015 PDFDocument16 pagesOpen Source Business Models 2015 PDFmin parkNo ratings yet
- Bioelectrical Signal Processing in Cardiac and Neurological ApplicationsFrom EverandBioelectrical Signal Processing in Cardiac and Neurological ApplicationsNo ratings yet
- Case Study StarbucksDocument14 pagesCase Study StarbucksLowis Sydney VillaNo ratings yet
- Elliptic Partial Differential Equations and Quasiconformal Mappings in the Plane (PMS-48)From EverandElliptic Partial Differential Equations and Quasiconformal Mappings in the Plane (PMS-48)No ratings yet
- Automatic Control Systems - B. C. Kuo and F. GolnaraghiDocument102 pagesAutomatic Control Systems - B. C. Kuo and F. GolnaraghiKavya KavyaNo ratings yet
- Linear Systems and Signals - B. P. LathiDocument194 pagesLinear Systems and Signals - B. P. LathiMaximNo ratings yet
- Linear Control Systems - B. S. Manke - SolutionsDocument251 pagesLinear Control Systems - B. S. Manke - Solutions4k4you25% (8)
- Scilab Textbook Companion for Signals And SystemsDocument53 pagesScilab Textbook Companion for Signals And SystemsbnatarajNo ratings yet
- Schaums Outlines Signals and Systems - H. P. HsuDocument335 pagesSchaums Outlines Signals and Systems - H. P. HsuMurali GangadharNo ratings yet
- Scilab Textbook Companion for Digital ControlDocument151 pagesScilab Textbook Companion for Digital ControlHHOLINo ratings yet
- Signals and Systems - P. R. Rao PDFDocument198 pagesSignals and Systems - P. R. Rao PDFjohnNo ratings yet
- Principles of Linear Systems and Signals B P Lathi PDFDocument140 pagesPrinciples of Linear Systems and Signals B P Lathi PDFVipin GuptaNo ratings yet
- Digital Signal ProcessingDocument148 pagesDigital Signal ProcessingTabish AliNo ratings yet
- Digital Signal Processing - S. Salivahanan, A. Vallavaraj and C. GnanapriyaDocument68 pagesDigital Signal Processing - S. Salivahanan, A. Vallavaraj and C. GnanapriyaMallik KglNo ratings yet
- Digital Signal Processing - A Computer Based Approach - S. K. MitraDocument91 pagesDigital Signal Processing - A Computer Based Approach - S. K. MitraUday JNo ratings yet
- Dokumen - Tips 85224768 Digital Signal P Ramesh BabuDocument148 pagesDokumen - Tips 85224768 Digital Signal P Ramesh BabuSanjeev GhanghashNo ratings yet
- Linear Algebra and Its Applications - G. StrangDocument51 pagesLinear Algebra and Its Applications - G. StrangLeonardo Ribeiro DominguesNo ratings yet
- Digital Signal Processing - R. BabuDocument148 pagesDigital Signal Processing - R. BabuSwapnil GulhaneNo ratings yet
- Scilab Textbook Companion for Control Systems EngineeringDocument81 pagesScilab Textbook Companion for Control Systems EngineeringJanardhan GannigaNo ratings yet
- Scilab Files Control Systems Engineering by Madan GopalDocument81 pagesScilab Files Control Systems Engineering by Madan GopalGurucharan DasNo ratings yet
- Linear Algebra and Its Applications - D. C. LayDocument71 pagesLinear Algebra and Its Applications - D. C. LayMd Chand AsiqueNo ratings yet
- Scilab Codes for Measurement Systems TextbookDocument54 pagesScilab Codes for Measurement Systems Textbookefasaravanan50% (2)
- Signals and Systems - P. R. RaoDocument202 pagesSignals and Systems - P. R. RaoShirish RansingNo ratings yet
- Numerical Methods For Scientists and Engineers by K. S. RaoDocument123 pagesNumerical Methods For Scientists and Engineers by K. S. RaoMeliza SouzaNo ratings yet
- Scilab Textbook Companion for Control SystemsDocument60 pagesScilab Textbook Companion for Control SystemsBalajiNo ratings yet
- Elements of Power System Analysis - W. D. StevensonDocument144 pagesElements of Power System Analysis - W. D. StevensonFaisal AhmedNo ratings yet
- Industrial Instrumentation - K. Krishnaswamy and S. VijayachitraDocument61 pagesIndustrial Instrumentation - K. Krishnaswamy and S. Vijayachitrakiran sagar0% (3)
- Linear Integrated Circuits - S. Salivahanan and V. S. K. Bhaaskaran PDFDocument79 pagesLinear Integrated Circuits - S. Salivahanan and V. S. K. Bhaaskaran PDFRaghav75% (4)
- Introduction To Numerical Methods in Chemical Engineering - P. Ahuja PDFDocument99 pagesIntroduction To Numerical Methods in Chemical Engineering - P. Ahuja PDFwreckiebNo ratings yet
- Electronic Instrumentation - H. S. KalsiDocument84 pagesElectronic Instrumentation - H. S. KalsiakNo ratings yet
- An Introduction To Numerical Analysis - K. E. Atkinson PDFDocument99 pagesAn Introduction To Numerical Analysis - K. E. Atkinson PDFcamilo199308No ratings yet
- Scilab Textbook Companion for Elementary Linear AlgebraDocument124 pagesScilab Textbook Companion for Elementary Linear AlgebrahodNo ratings yet
- AnalDocument142 pagesAnalSomya PrasadNo ratings yet
- Scilab Textbook Companion for Industrial InstrumentationDocument60 pagesScilab Textbook Companion for Industrial Instrumentationyuva kasiNo ratings yet
- Linear Algebra and Its Applications - D. C. LayDocument71 pagesLinear Algebra and Its Applications - D. C. LayKaryl VizcondeNo ratings yet
- Modern Power System Analysis - D. P. Kothari and I. J. NagrathDocument188 pagesModern Power System Analysis - D. P. Kothari and I. J. NagrathEmmanuel Cornejo Apaza50% (2)
- DietelDocument92 pagesDietelPooja SahuNo ratings yet
- Elementary Numerical Analysis - An Algorithmic Approach - S. D. Conte and C. de BoorDocument51 pagesElementary Numerical Analysis - An Algorithmic Approach - S. D. Conte and C. de BoorAndhy Diaz100% (1)
- Electric Circuits - M. Navhi and J. A. Edminister PDFDocument113 pagesElectric Circuits - M. Navhi and J. A. Edminister PDFNamratha ThataNo ratings yet
- Introduction To Numerical Methods in Chemical Engineering - P. Ahuja PDFDocument99 pagesIntroduction To Numerical Methods in Chemical Engineering - P. Ahuja PDFSarath RNo ratings yet
- Numerical Analysis - I. Jacques and C. Judd PDFDocument109 pagesNumerical Analysis - I. Jacques and C. Judd PDFMaria AquiseNo ratings yet
- Scilab Textbook Companion for Discrete MathematicsDocument62 pagesScilab Textbook Companion for Discrete MathematicsJavierDhi MBNo ratings yet
- Power System Analysis and Design - B. R. Gupta PDFDocument279 pagesPower System Analysis and Design - B. R. Gupta PDFjjoohhnn9063% (8)
- Power System Analysis and Design - B. R. Gupta PDFDocument290 pagesPower System Analysis and Design - B. R. Gupta PDFswapnil jawaleNo ratings yet
- Discrete Mathematics - S. Lipschutz, M. Lipson and V. H. PatilDocument62 pagesDiscrete Mathematics - S. Lipschutz, M. Lipson and V. H. PatilAndhy DiazNo ratings yet
- Mechanical Vibration G K Grover PDFDocument58 pagesMechanical Vibration G K Grover PDFbunty25% (4)
- Digital Image Processing - S. Jayaraman, S. Esakkirajan and T. Veerakumar PDFDocument112 pagesDigital Image Processing - S. Jayaraman, S. Esakkirajan and T. Veerakumar PDFchiragNo ratings yet
- Scilab Textbook Companion for Linear Integrated CircuitsDocument76 pagesScilab Textbook Companion for Linear Integrated CircuitsSathvick BatchuNo ratings yet
- Scilab Codes for Electronic Devices TextbookDocument130 pagesScilab Codes for Electronic Devices Textbookmilan chaturvediNo ratings yet
- Op-Amps and Linear Integrated Circuits - R. A. Gayakwad PDFDocument92 pagesOp-Amps and Linear Integrated Circuits - R. A. Gayakwad PDFShamawn Muktadeer Shovon50% (16)
- Cycling FastDocument235 pagesCycling FastHHOLI100% (1)
- VA Absa Cape Epic Training ProgrammeDocument19 pagesVA Absa Cape Epic Training ProgrammeHHOLINo ratings yet
- Subjunctive Mood Key Word TransformationsDocument1 pageSubjunctive Mood Key Word TransformationsHHOLINo ratings yet
- 10 Useful Idioms & Phrasal Verbs PDFDocument10 pages10 Useful Idioms & Phrasal Verbs PDFJessii giblazNo ratings yet
- Deemax Pro 29 2019 FRONTDocument2 pagesDeemax Pro 29 2019 FRONTHHOLINo ratings yet
- Getting Things Done Primer PDFDocument44 pagesGetting Things Done Primer PDFgco222100% (2)
- Deemax Pro 29 Wheel Specs and CompatibilityDocument2 pagesDeemax Pro 29 Wheel Specs and CompatibilityHHOLINo ratings yet
- SUBJUNTIVE IN ENGLISH (TABLE) + Key Word Transformation ExercisesDocument2 pagesSUBJUNTIVE IN ENGLISH (TABLE) + Key Word Transformation Exercisesanestesista100% (1)
- Business EnglishDocument192 pagesBusiness EnglishVenkata Rao MynampatiNo ratings yet
- Getting Things Done Introduction Hans Fangohr PDFDocument51 pagesGetting Things Done Introduction Hans Fangohr PDFShane BrooksNo ratings yet
- Ee PDFDocument1 pageEe PDFHHOLINo ratings yet
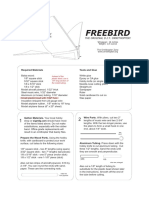
- Freebird PDFDocument5 pagesFreebird PDFHHOLINo ratings yet
- Cardstock Bird Kit Pattern for FLEX OrnithopterDocument1 pageCardstock Bird Kit Pattern for FLEX OrnithopterHHOLINo ratings yet
- Manual Smath StudioDocument32 pagesManual Smath StudioHHOLINo ratings yet
- Basic Electrical Engineering - P. S. DhogalDocument98 pagesBasic Electrical Engineering - P. S. DhogalHHOLINo ratings yet
- Scilab Textbook Companion for Digital ControlDocument151 pagesScilab Textbook Companion for Digital ControlHHOLINo ratings yet
- Fundamentals of Electric Drives and Control - B. R. Gupta and v. SinghalDocument83 pagesFundamentals of Electric Drives and Control - B. R. Gupta and v. SinghalHHOLINo ratings yet
- Navigating with VOR and NDB Radio SignalsDocument2 pagesNavigating with VOR and NDB Radio SignalsAhmed ShahNo ratings yet
- EMI Effects on Aviation TechnologyDocument25 pagesEMI Effects on Aviation Technology5169No ratings yet
- Apxve13 C A20Document5 pagesApxve13 C A20Mon amour Pour2022No ratings yet
- Datasheet W3NQN PDFDocument2 pagesDatasheet W3NQN PDFGabriela GNo ratings yet
- Dealer Price List - 2023Document10 pagesDealer Price List - 2023yousufiacsNo ratings yet
- Shenzhen Xinlisheng Hardware Electronics Co., LTD.: Proforma InvoiceDocument1 pageShenzhen Xinlisheng Hardware Electronics Co., LTD.: Proforma InvoiceEnrico Alberth Eletto SiviraNo ratings yet
- CQI and SNRDocument7 pagesCQI and SNRamit_tomar_amitNo ratings yet
- NSE3 FortiAP PO 20200409 WATERMARK PDFDocument21 pagesNSE3 FortiAP PO 20200409 WATERMARK PDFVučković Dragan Aleksandar0% (1)
- Hofa Iq Comp Manual enDocument11 pagesHofa Iq Comp Manual enmdNo ratings yet
- HDMI to ISDB-T H.264 Encoder Modulator User ManualDocument24 pagesHDMI to ISDB-T H.264 Encoder Modulator User ManualMatheus BuenoNo ratings yet
- 5 C's of IoT Solutions CatalogDocument14 pages5 C's of IoT Solutions CatalogMarian VerdeNo ratings yet
- Electronic SwitchingDocument55 pagesElectronic SwitchingSunny Tyagi VatsNo ratings yet
- Intensity Level Resolution Refers To The Number ofDocument25 pagesIntensity Level Resolution Refers To The Number ofLucas GrantNo ratings yet
- Orb Synth GettingStartedDocument4 pagesOrb Synth GettingStartedjew puNo ratings yet
- 04 April 1989Document124 pages04 April 1989Fernando MartinNo ratings yet
- Inmarsat C System Definition Manual - CD004 PDFDocument1,644 pagesInmarsat C System Definition Manual - CD004 PDFborisgolodenko100% (1)
- VOLVO Transponder CatalogDocument4 pagesVOLVO Transponder CatalogKIMI GOKU YTNo ratings yet
- MW Material IdentificationDocument18 pagesMW Material IdentificationpankajengNo ratings yet
- 602-LTE ENB System Counter Description - pkg2.5.0 - V2.0Document359 pages602-LTE ENB System Counter Description - pkg2.5.0 - V2.0tooma123No ratings yet
- Yagi Uda Antenna NoteDocument3 pagesYagi Uda Antenna NoteAbdullah WalidNo ratings yet
- Apollo OPT: High Capacity Otn/Packet SwitchingDocument2 pagesApollo OPT: High Capacity Otn/Packet Switchingrobert adamsNo ratings yet
- DSP SmartDocument91 pagesDSP SmartNishanth NissanNo ratings yet
- CHP 1 Mcq's ForouzanDocument5 pagesCHP 1 Mcq's Forouzanmryan_37No ratings yet
- Brief Introduction To Codecs PDFDocument1 pageBrief Introduction To Codecs PDFAhmedNo ratings yet
- EDFA-GM ProductsheetDocument2 pagesEDFA-GM ProductsheetbinhbaambooNo ratings yet
- Neptune NPT-: Hybrid Metro Access TransportDocument2 pagesNeptune NPT-: Hybrid Metro Access TransportgopichettyNo ratings yet
- El Centro Earthquake Data AnalysisDocument4 pagesEl Centro Earthquake Data AnalysisQueren SurianoNo ratings yet
- MTI G09RRH-43 LTE RRH Band 8 Datasheet V1.0Document2 pagesMTI G09RRH-43 LTE RRH Band 8 Datasheet V1.0mohsin881No ratings yet
- Cell FundamentalDocument58 pagesCell FundamentalPhạm Phương Dung67% (3)
- EE 577 Lecture on Wireless Multipath FadingDocument18 pagesEE 577 Lecture on Wireless Multipath FadingmohamedNo ratings yet
- The Age of Magical Overthinking: Notes on Modern IrrationalityFrom EverandThe Age of Magical Overthinking: Notes on Modern IrrationalityRating: 4 out of 5 stars4/5 (13)
- Raising Mentally Strong Kids: How to Combine the Power of Neuroscience with Love and Logic to Grow Confident, Kind, Responsible, and Resilient Children and Young AdultsFrom EverandRaising Mentally Strong Kids: How to Combine the Power of Neuroscience with Love and Logic to Grow Confident, Kind, Responsible, and Resilient Children and Young AdultsRating: 5 out of 5 stars5/5 (1)
- Why We Die: The New Science of Aging and the Quest for ImmortalityFrom EverandWhy We Die: The New Science of Aging and the Quest for ImmortalityRating: 3.5 out of 5 stars3.5/5 (2)
- The Ritual Effect: From Habit to Ritual, Harness the Surprising Power of Everyday ActionsFrom EverandThe Ritual Effect: From Habit to Ritual, Harness the Surprising Power of Everyday ActionsRating: 3.5 out of 5 stars3.5/5 (3)
- LIT: Life Ignition Tools: Use Nature's Playbook to Energize Your Brain, Spark Ideas, and Ignite ActionFrom EverandLIT: Life Ignition Tools: Use Nature's Playbook to Energize Your Brain, Spark Ideas, and Ignite ActionRating: 4 out of 5 stars4/5 (402)
- Think This, Not That: 12 Mindshifts to Breakthrough Limiting Beliefs and Become Who You Were Born to BeFrom EverandThink This, Not That: 12 Mindshifts to Breakthrough Limiting Beliefs and Become Who You Were Born to BeNo ratings yet
- Summary: The Psychology of Money: Timeless Lessons on Wealth, Greed, and Happiness by Morgan Housel: Key Takeaways, Summary & Analysis IncludedFrom EverandSummary: The Psychology of Money: Timeless Lessons on Wealth, Greed, and Happiness by Morgan Housel: Key Takeaways, Summary & Analysis IncludedRating: 5 out of 5 stars5/5 (78)
- Techniques Exercises And Tricks For Memory ImprovementFrom EverandTechniques Exercises And Tricks For Memory ImprovementRating: 4.5 out of 5 stars4.5/5 (40)
- Outlive: The Science and Art of Longevity by Peter Attia: Key Takeaways, Summary & AnalysisFrom EverandOutlive: The Science and Art of Longevity by Peter Attia: Key Takeaways, Summary & AnalysisRating: 4 out of 5 stars4/5 (1)
- Raising Good Humans: A Mindful Guide to Breaking the Cycle of Reactive Parenting and Raising Kind, Confident KidsFrom EverandRaising Good Humans: A Mindful Guide to Breaking the Cycle of Reactive Parenting and Raising Kind, Confident KidsRating: 4.5 out of 5 stars4.5/5 (169)
- The Obesity Code: Unlocking the Secrets of Weight LossFrom EverandThe Obesity Code: Unlocking the Secrets of Weight LossRating: 5 out of 5 stars5/5 (4)
- The Ultimate Guide To Memory Improvement TechniquesFrom EverandThe Ultimate Guide To Memory Improvement TechniquesRating: 5 out of 5 stars5/5 (34)
- Mindset by Carol S. Dweck - Book Summary: The New Psychology of SuccessFrom EverandMindset by Carol S. Dweck - Book Summary: The New Psychology of SuccessRating: 4.5 out of 5 stars4.5/5 (327)
- The Garden Within: Where the War with Your Emotions Ends and Your Most Powerful Life BeginsFrom EverandThe Garden Within: Where the War with Your Emotions Ends and Your Most Powerful Life BeginsNo ratings yet
- Roxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingFrom EverandRoxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingRating: 5 out of 5 stars5/5 (4)
- The Courage Habit: How to Accept Your Fears, Release the Past, and Live Your Courageous LifeFrom EverandThe Courage Habit: How to Accept Your Fears, Release the Past, and Live Your Courageous LifeRating: 4.5 out of 5 stars4.5/5 (253)
- The Happiness Trap: How to Stop Struggling and Start LivingFrom EverandThe Happiness Trap: How to Stop Struggling and Start LivingRating: 4 out of 5 stars4/5 (1)
- Summary: Outlive: The Science and Art of Longevity by Peter Attia MD, With Bill Gifford: Key Takeaways, Summary & AnalysisFrom EverandSummary: Outlive: The Science and Art of Longevity by Peter Attia MD, With Bill Gifford: Key Takeaways, Summary & AnalysisRating: 4.5 out of 5 stars4.5/5 (41)
- The Stress-Proof Brain: Master Your Emotional Response to Stress Using Mindfulness and NeuroplasticityFrom EverandThe Stress-Proof Brain: Master Your Emotional Response to Stress Using Mindfulness and NeuroplasticityRating: 4.5 out of 5 stars4.5/5 (109)
- Roxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingFrom EverandRoxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingRating: 3.5 out of 5 stars3.5/5 (33)
- The Tennis Partner: A Doctor's Story of Friendship and LossFrom EverandThe Tennis Partner: A Doctor's Story of Friendship and LossRating: 4.5 out of 5 stars4.5/5 (4)
- The Body Keeps the Score by Bessel Van der Kolk, M.D. - Book Summary: Brain, Mind, and Body in the Healing of TraumaFrom EverandThe Body Keeps the Score by Bessel Van der Kolk, M.D. - Book Summary: Brain, Mind, and Body in the Healing of TraumaRating: 4.5 out of 5 stars4.5/5 (266)
- Summary: Limitless: Upgrade Your Brain, Learn Anything Faster, and Unlock Your Exceptional Life By Jim Kwik: Key Takeaways, Summary and AnalysisFrom EverandSummary: Limitless: Upgrade Your Brain, Learn Anything Faster, and Unlock Your Exceptional Life By Jim Kwik: Key Takeaways, Summary and AnalysisRating: 5 out of 5 stars5/5 (8)