You might also like
- Soft Starter InversorDocument6 pagesSoft Starter InversorAnderson JimenezNo ratings yet
- Regulador automático de voltaje AVRDocument7 pagesRegulador automático de voltaje AVRGabriel StalinNo ratings yet
- Máquinas eléctricas II: motores síncronosDocument4 pagesMáquinas eléctricas II: motores síncronosDiego J. Alvernia100% (1)
- Determinación de Los Terminales Correspondientes Entre Dos Transformadores MonofásicosDocument15 pagesDeterminación de Los Terminales Correspondientes Entre Dos Transformadores MonofásicosManuel Mariñes DelgadoNo ratings yet
- Laboratorio # 5 - Control de Temperatura en Una CalderaDocument7 pagesLaboratorio # 5 - Control de Temperatura en Una CalderaHubert Maraza JaliriNo ratings yet
- AvrDocument8 pagesAvrUtuto NoaNo ratings yet
- Conexiones trifásicas bancadasDocument11 pagesConexiones trifásicas bancadasEnrique Gerardo Arbaiza ChavezNo ratings yet
- Trabajo de SCRDocument8 pagesTrabajo de SCRAguirre PalenciaNo ratings yet
- Informe Nº1 - Generadores SincronosDocument24 pagesInforme Nº1 - Generadores SincronosWilber William Moscoso ZamudioNo ratings yet
- 02 - Arranque de Motores 3FDocument19 pages02 - Arranque de Motores 3FjuanNo ratings yet
- Potencia en Generadores SincronosDocument19 pagesPotencia en Generadores SincronosariasroberthNo ratings yet
- Clasificación de motores según NEMA y aplicacionesDocument10 pagesClasificación de motores según NEMA y aplicacionesCopa GNo ratings yet
- Regulador de Velocidad en Turbinas HidraulicasDocument11 pagesRegulador de Velocidad en Turbinas HidraulicasMiguel CVNo ratings yet
- SEP fallas y comportamiento corrienteDocument52 pagesSEP fallas y comportamiento corrienteAlfredo Barzola RamirezNo ratings yet
- Modelado Del Generador Síncrono y Curva de CapabilidadDocument14 pagesModelado Del Generador Síncrono y Curva de CapabilidadNajar10No ratings yet
- Paralelo de alternadoresDocument12 pagesParalelo de alternadoresOmanuel569No ratings yet
- Prueba 2 RodrigoDocument5 pagesPrueba 2 RodrigoRodrigo MoyánNo ratings yet
- Inversor TrifasicoDocument5 pagesInversor TrifasicoAlex ZuritaNo ratings yet
- 03 Rav RasDocument63 pages03 Rav RasAlonso CrisóstomoNo ratings yet
- Sistema eléctrico de potencia: generación, transmisión y distribución de energíaDocument9 pagesSistema eléctrico de potencia: generación, transmisión y distribución de energíaJose Luis Manuel Fala CarbajalNo ratings yet
- Exitatriz Del Generador AsincronoDocument9 pagesExitatriz Del Generador AsincronoХуан ЛуисNo ratings yet
- Máquinas Eléctricas EjerciciosDocument2 pagesMáquinas Eléctricas EjercicioseltevilleNo ratings yet
- Presentación DigsilentDocument33 pagesPresentación Digsilentsebas_rojas_230% (1)
- Maquinas 2 Protocolo de Pruebas Jaula ArdillaDocument8 pagesMaquinas 2 Protocolo de Pruebas Jaula ArdillaDavid GallegosNo ratings yet
- La Maquina de Corriente Continua Operando Como GeneradorDocument12 pagesLa Maquina de Corriente Continua Operando Como GeneradorCc ErnestoNo ratings yet
- Prueba de Polaridad de Los TrasformadoresDocument3 pagesPrueba de Polaridad de Los TrasformadoresFausto QuirogaNo ratings yet
- Curva de Capabilidad y Generador Con Cargas Resistivas Capacitivas e InductivasDocument15 pagesCurva de Capabilidad y Generador Con Cargas Resistivas Capacitivas e InductivasJhim J. MoaNo ratings yet
- Guía de Practica N04Document9 pagesGuía de Practica N04Johann Smith Aranda RamosNo ratings yet
- Taller Maquinas 2Document3 pagesTaller Maquinas 2Alejo Martinez Suárez0% (2)
- Disparo de Triacs y TiristoresDocument21 pagesDisparo de Triacs y TiristoresJuanito PanchoNo ratings yet
- 14 Sistemas de ExcitatrizDocument23 pages14 Sistemas de ExcitatrizFebrina Ron DelgadoNo ratings yet
- Taller Final Alex BadilloDocument9 pagesTaller Final Alex BadilloAlex Badillo100% (1)
- Compensadores PDFDocument9 pagesCompensadores PDFηχητικός σκιάNo ratings yet
- C40 A C60 - B3.3-G11 Con PC1.1 DSE7310 o ComAp Manual de InstalacionDocument156 pagesC40 A C60 - B3.3-G11 Con PC1.1 DSE7310 o ComAp Manual de InstalacionMartin FloresNo ratings yet
- El Campo Magnético GiratorioDocument3 pagesEl Campo Magnético GiratorioDario Javier Tubon Tite100% (1)
- Trabajo-Motor Monofasico de Fase PartidaDocument16 pagesTrabajo-Motor Monofasico de Fase PartidaDaniel Alejandro FlorezNo ratings yet
- Nota Tecnica AVR II ParteDocument1 pageNota Tecnica AVR II ParteIRR_2012No ratings yet
- Curva de Capacidad de Una Maquina SincronaDocument20 pagesCurva de Capacidad de Una Maquina SincronaluCHo MORIANONo ratings yet
- Características en vacío de máquinas CCDocument16 pagesCaracterísticas en vacío de máquinas CCNeil ChoqueNo ratings yet
- Marco Teorico MotoresDocument5 pagesMarco Teorico MotoresDaniel MartinezNo ratings yet
- Maquinas Electricas Capitulo 7Document13 pagesMaquinas Electricas Capitulo 7JuandeDiosNo ratings yet
- Motor Marco TeoricoDocument8 pagesMotor Marco TeoricoVillacorta AlejandroNo ratings yet
- Requerimientos para Repotenciar MotorDocument2 pagesRequerimientos para Repotenciar MotorAlejandra de las Nieves0% (2)
- Guía de uso del arrancador electrónico estático PE-STARTDocument22 pagesGuía de uso del arrancador electrónico estático PE-STARTCRISTIAN DAVID OROYA INFANTESNo ratings yet
- Generador Con Carga Operando Solo PDFDocument9 pagesGenerador Con Carga Operando Solo PDFDavid Javier0% (1)
- Pre-Informe Maquina Asincrona Vacio y CortoDocument5 pagesPre-Informe Maquina Asincrona Vacio y CortosandraNo ratings yet
- 1 108 Amp 50 HP S 450 RPM 220 V 60 HZ: Datos Motor FP Unidad EstrellaDocument1 page1 108 Amp 50 HP S 450 RPM 220 V 60 HZ: Datos Motor FP Unidad EstrellaAna LucyNo ratings yet
- Practica 4 Maquinas SincronasDocument8 pagesPractica 4 Maquinas SincronasDaxterMancerNo ratings yet
- Informe N 05 Máquina SíncronaDocument20 pagesInforme N 05 Máquina SíncronaNeyserBurgaMarin100% (1)
- Consumo Especifico de Los Instrumentos de MedicionDocument5 pagesConsumo Especifico de Los Instrumentos de MedicionCristhianAlexanderAguilarChavez100% (1)
- Configuraciones Habituales en Centrales de Ciclo CombinadoDocument6 pagesConfiguraciones Habituales en Centrales de Ciclo CombinadoEreoedereiegeoe SQNo ratings yet
- Agc - Control Automatico de La GeneracionDocument61 pagesAgc - Control Automatico de La GeneracionCristhian StalinNo ratings yet
- Generadores Sincronos de Anillos Rozantes 233edeDocument13 pagesGeneradores Sincronos de Anillos Rozantes 233edeAngel Zevallos VeraNo ratings yet
- Práctica05 - Puente H Con Transistores BJTDocument7 pagesPráctica05 - Puente H Con Transistores BJTLizbeth SamaniegoNo ratings yet
- Práctica 7 Conversión Digital-Analógico PDFDocument4 pagesPráctica 7 Conversión Digital-Analógico PDFJuan CotacioNo ratings yet
- Protección de generadores trifásicos síncronosDocument36 pagesProtección de generadores trifásicos síncronosAlexander David Tipan SanchezNo ratings yet
- RELE IAC53 TraduccionDocument17 pagesRELE IAC53 TraduccionBryanGilNo ratings yet
- AVR y RASDocument13 pagesAVR y RASAndersonGabriel23No ratings yet
- Imforme de Estabilizadores de Tension 2015Document12 pagesImforme de Estabilizadores de Tension 2015Javier CuaylaNo ratings yet
- Armónicas en Sistemas Eléctricos IndustrialesFrom EverandArmónicas en Sistemas Eléctricos IndustrialesRating: 4.5 out of 5 stars4.5/5 (12)
- Capitulo 3Document152 pagesCapitulo 3Antonio GómezNo ratings yet
- Trafo de Potencia PDFDocument110 pagesTrafo de Potencia PDFjasobpqNo ratings yet
- Trafo de Potencia PDFDocument110 pagesTrafo de Potencia PDFjasobpqNo ratings yet
- Clase 1Document69 pagesClase 1mamani mamani paulNo ratings yet
- Seleccion Del VentiladorDocument10 pagesSeleccion Del VentiladorjasobpqNo ratings yet
- Circuitos RectificadoresDocument26 pagesCircuitos RectificadoresjasobpqNo ratings yet
- Lab5 ProDocument15 pagesLab5 ProjasobpqNo ratings yet
- Trafo de Potencia PDFDocument110 pagesTrafo de Potencia PDFjasobpqNo ratings yet
- Gestión de Mantenimiento en Líneas de TransmisiónDocument6 pagesGestión de Mantenimiento en Líneas de TransmisiónjasobpqNo ratings yet
- IturriagaDocument2 pagesIturriagajasobpqNo ratings yet
- Cuadernillo de MotoreselectricosDocument24 pagesCuadernillo de MotoreselectricosjasobpqNo ratings yet
- La Fisica de Los Superheroes - James KakaliosDocument1,444 pagesLa Fisica de Los Superheroes - James KakaliosJerónimo CardanoNo ratings yet
- Ejercicios Resueltos PLCDocument3 pagesEjercicios Resueltos PLCchoquistomateNo ratings yet
- Circuitos RectificadoresDocument26 pagesCircuitos RectificadoresjasobpqNo ratings yet
- Cuadernillo de MotoreselectricosDocument24 pagesCuadernillo de MotoreselectricosjasobpqNo ratings yet
- Los Horrores de La Siberia - Emilio SalgariDocument645 pagesLos Horrores de La Siberia - Emilio SalgarijasobpqNo ratings yet
- Miguel Marquéz MethodDocument38 pagesMiguel Marquéz MethodTomas Francisco Erazo Josa100% (1)
- Calculo Conductor MotoresDocument6 pagesCalculo Conductor MotoresAntonionil123No ratings yet
- Semilla AjonjoliDocument1 pageSemilla AjonjolijasobpqNo ratings yet
- Regulacion de VoltajeDocument15 pagesRegulacion de VoltajeWilliam Alfonso Moreno PerezNo ratings yet
- Arrollamientos A Anillos 32aDocument25 pagesArrollamientos A Anillos 32aEdgard Martin Mejia SolanoNo ratings yet
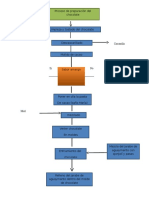
- Diagrama de Flujo Del ChocolateDocument1 pageDiagrama de Flujo Del Chocolatejasobpq0% (1)
- Arrollamientos A Anillos 32aDocument25 pagesArrollamientos A Anillos 32aEdgard Martin Mejia SolanoNo ratings yet
- Reanimación Cardio PulmonarDocument2 pagesReanimación Cardio PulmonarjasobpqNo ratings yet
- Mezclado RaDocument13 pagesMezclado Rarufinius100% (2)
- Transistores IGBTDocument10 pagesTransistores IGBTArnold Arley Pineda Valbuena100% (3)
- Problemas Resueltos STDocument12 pagesProblemas Resueltos STJulio GamboatrujilloNo ratings yet
- Capitulo10 PDFDocument60 pagesCapitulo10 PDFekala23No ratings yet
- Fisiologia y Metabolismo BacterianoDocument16 pagesFisiologia y Metabolismo BacterianoAbraham YehezkelNo ratings yet
- Psicologia Del Eneagrama - EneatestDocument24 pagesPsicologia Del Eneagrama - Eneatesthuachymofly50% (2)
- ESTILO DE APRENDIZAJE Microsoft WordDocument7 pagesESTILO DE APRENDIZAJE Microsoft WordRosa Elena Nataren DiazNo ratings yet
- Tarea 9 Informatica.Document3 pagesTarea 9 Informatica.karen escalanteNo ratings yet
- Evidencia Clases y ObjetosDocument3 pagesEvidencia Clases y ObjetosWanwixNo ratings yet
- 0 HoloBuilder Cosapi CDocument5 pages0 HoloBuilder Cosapi CAlEx CrUzNo ratings yet
- Agenda Mujer Organizada Finanzas Planes SaludDocument25 pagesAgenda Mujer Organizada Finanzas Planes SaludLeonardo Flores100% (2)
- InfografiaDocument1 pageInfografiaLuis JosuéNo ratings yet
- Flottec 8020 Colector SDS SP 2018-07-31Document6 pagesFlottec 8020 Colector SDS SP 2018-07-31xibs2009No ratings yet
- Practicas Modulo 2Document2 pagesPracticas Modulo 2Luis BetancourtNo ratings yet
- SistemaRegistroSanitarioDocument11 pagesSistemaRegistroSanitarioDaniel CruzNo ratings yet
- Fundición moldes metálicosDocument6 pagesFundición moldes metálicosGuillermo CV100% (1)
- Evaluación 2 APPDocument5 pagesEvaluación 2 APPDayana Castro100% (1)
- Ejercicios para Presentar 3Document59 pagesEjercicios para Presentar 3Yobana VasquezNo ratings yet
- Evaluación Módulo 3Document6 pagesEvaluación Módulo 3REINALDO RODRIGUEZ HERNANDEZNo ratings yet
- Derecho LaboralDocument19 pagesDerecho LaboralDanielle CarreñoNo ratings yet
- PRESENTACIONDocument18 pagesPRESENTACIONLEILA LEONNo ratings yet
- InsecticidasDocument38 pagesInsecticidaskatlu.herr2023No ratings yet
- SESIÓN de LiderazgoDocument10 pagesSESIÓN de LiderazgoHenrry Garcia Flores100% (1)
- Titulación Ácido Base. Guía.Document7 pagesTitulación Ácido Base. Guía.Valentina MoralesNo ratings yet
- Guía (Revolución Francesa)Document7 pagesGuía (Revolución Francesa)Claudia Olate BelloNo ratings yet
- Modelo sistémico estructural MinuchinDocument36 pagesModelo sistémico estructural MinuchinEstefany Heidy Triveños Peralta100% (7)
- 04 - CONSTANCIA - Série Completa1Document1,149 pages04 - CONSTANCIA - Série Completa1Benjamin DominguezNo ratings yet
- Estructura EiaDocument14 pagesEstructura EiaeddysonNo ratings yet
- Redes 2023 HoyDocument14 pagesRedes 2023 Hoyalbertitoxtlv77No ratings yet
- NTC1190 PLATANOS (Banano) PDFDocument7 pagesNTC1190 PLATANOS (Banano) PDFERIKA MARLYD GARCIA GONZALEZ0% (1)
- Anemias CarencialesDocument73 pagesAnemias CarencialesKarla Suhei100% (1)
- Caso Clinico Obstruccion Intestinal.Document11 pagesCaso Clinico Obstruccion Intestinal.MARLIN ELIZABETH YARLEQUE JUAREZNo ratings yet
- Ejercicios Formas CanonicasDocument2 pagesEjercicios Formas CanonicasCésar David RomeroNo ratings yet
- Batolito AntioqueñoDocument5 pagesBatolito AntioqueñoJhaner carvajalNo ratings yet