You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Grover Furr-Krushchev Lied-Erythros Press and Media, LLC (2011)Document430 pagesGrover Furr-Krushchev Lied-Erythros Press and Media, LLC (2011)fernamedNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Textes Culinaires M Sopotamiens PDFDocument131 pagesTextes Culinaires M Sopotamiens PDFfernamedNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Notes of A Journey Tu PersiaDocument10 pagesNotes of A Journey Tu PersiafernamedNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Origin of YezidisDocument3 pagesThe Origin of YezidisfernamedNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Yezidi Oral TraditionDocument318 pagesYezidi Oral Traditionfernamed100% (2)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Lambert - Millard 1969 AtrahasisDocument112 pagesLambert - Millard 1969 Atrahasisbestiarios100% (4)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Religius Oral TraditionDocument12 pagesReligius Oral TraditionfernamedNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Kakuro #1-4: 6X6 Kakuro Puzzles by Krazydad, Volume 1, Book 2Document3 pagesKakuro #1-4: 6X6 Kakuro Puzzles by Krazydad, Volume 1, Book 2Aashirtha SNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- English Task For 11th GradeDocument8 pagesEnglish Task For 11th GradeDevi NurulhudaNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- Mathematics HL Paper 2 TZ2 PDFDocument16 pagesMathematics HL Paper 2 TZ2 PDFMADANNo ratings yet
- The Better Sine Wave IndicatorDocument10 pagesThe Better Sine Wave IndicatorcoachbiznesuNo ratings yet
- ME 354A Vibration Problems and SolutionsDocument4 pagesME 354A Vibration Problems and SolutionsAkhilNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
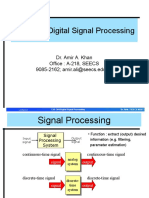
- CSE 304-Digital Signal Processing: Dr. Amir A. Khan Office: A-218, SEECS 9085-2162 Amir - Ali@seecs - Edu.pkDocument22 pagesCSE 304-Digital Signal Processing: Dr. Amir A. Khan Office: A-218, SEECS 9085-2162 Amir - Ali@seecs - Edu.pkAlamgir Ahmad KhattakNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- 9789533073248UWBTechnologiesDocument454 pages9789533073248UWBTechnologiesConstantin PişteaNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Rangka Batang RhezaDocument11 pagesRangka Batang RhezaKABINET JALADARA NABDANo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Iygb Gce: Mathematics FP2 Advanced LevelDocument5 pagesIygb Gce: Mathematics FP2 Advanced LeveldfdsfsdNo ratings yet
- Truncation Errors and The Taylor Series: Engr. Aure Flo A. Oraya, MSCEDocument29 pagesTruncation Errors and The Taylor Series: Engr. Aure Flo A. Oraya, MSCEHatsuieeNo ratings yet
- RD Sharma Solutions (Ex - 1. 5, 1.6, 1.7 & 1.8) - Rational Numbers - RD Sharma SolDocument15 pagesRD Sharma Solutions (Ex - 1. 5, 1.6, 1.7 & 1.8) - Rational Numbers - RD Sharma SolSunil AnandNo ratings yet
- Midterm 3 SolutionsDocument6 pagesMidterm 3 SolutionscdzavNo ratings yet
- The 3-Rainbow Index of GraphsDocument28 pagesThe 3-Rainbow Index of GraphsDinda KartikaNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Stratified Random Sampling PrecisionDocument10 pagesStratified Random Sampling PrecisionEPAH SIRENGONo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Xtxtset PDFDocument13 pagesXtxtset PDFhoneygggggNo ratings yet
- IT-Glossary French - EnglishDocument56 pagesIT-Glossary French - EnglishGosia SielickaNo ratings yet
- UCC Computer Science student explores greedy algorithmsDocument3 pagesUCC Computer Science student explores greedy algorithmsEmmanuel EshunNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- National University of Engineering Statistics Qualified PracticeDocument6 pagesNational University of Engineering Statistics Qualified PracticeAlvaro Gabriel Culqui MontoyaNo ratings yet
- Mechanical Vibration NotesDocument56 pagesMechanical Vibration NotesYadanaNo ratings yet
- Decimal Differentiation by Monica LenewayDocument6 pagesDecimal Differentiation by Monica Lenewaygoldenoj100% (4)
- Journal of Hydrology: Hoshin V. Gupta, Harald Kling, Koray K. Yilmaz, Guillermo F. MartinezDocument12 pagesJournal of Hydrology: Hoshin V. Gupta, Harald Kling, Koray K. Yilmaz, Guillermo F. MartinezDavid JimenezNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Sensex 1Document354 pagesSensex 1raghav4life8724No ratings yet
- Essentials of Chemical Reaction Engineering 1st Edition Fogler Solutions ManualDocument35 pagesEssentials of Chemical Reaction Engineering 1st Edition Fogler Solutions Manualnancycarrollaocprizwen100% (11)
- Heat Transfer ME G533 Course OverviewDocument5 pagesHeat Transfer ME G533 Course OverviewramsastryNo ratings yet
- ND MechatronicsDocument260 pagesND MechatronicsaniaffiahNo ratings yet
- Divergence and CurlDocument8 pagesDivergence and CurlaliNo ratings yet
- Lecture 22Document6 pagesLecture 22Rainesius DohlingNo ratings yet
- Aircraft Radio SystemsDocument259 pagesAircraft Radio SystemsEdward Muriithi100% (2)
- European Mouflon - English - CA09Document8 pagesEuropean Mouflon - English - CA09Denis TancevNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)