You might also like
- MC Murray InverterDocument92 pagesMC Murray InverterGnanaseharan Arunachalam100% (5)
- Electric Drives Control DC MotorsDocument5 pagesElectric Drives Control DC MotorsKarthikeyan Govindaraj100% (3)
- Formation of Ybus matrix using singular transformationDocument10 pagesFormation of Ybus matrix using singular transformationsepidmehr0% (1)
- Ashfaq Hussain Electrical Machines PDF FreeDocument4 pagesAshfaq Hussain Electrical Machines PDF FreeShubham Oswal32% (25)
- Bee4113 Chapter 3Document30 pagesBee4113 Chapter 3Kung ChinHan100% (17)
- Ee462 Final ElectricalDocument154 pagesEe462 Final ElectricalQuophi Click Lyftted100% (1)
- Electric Drives by GK Dubey PDFDocument54 pagesElectric Drives by GK Dubey PDFTana Azeez100% (1)
- AC Voltage Controllers: AC To Ac ConvertersDocument25 pagesAC Voltage Controllers: AC To Ac ConvertersPhạm Hữu Kỳ0% (1)
- Motor Drives Four LoadsDocument3 pagesMotor Drives Four Loadslvb123100% (1)
- Questions & Answers On Electromechanical Energy ConversionsDocument14 pagesQuestions & Answers On Electromechanical Energy Conversionskibrom atsbhaNo ratings yet
- Power Electronics MCQ & Short QaDocument19 pagesPower Electronics MCQ & Short QaAngamuthu Ananth100% (2)
- Power Electronics VivaDocument7 pagesPower Electronics VivaAbhay Shankar Bharadwaj100% (1)
- Tutsheet5 SolutionsDocument5 pagesTutsheet5 SolutionsDevendra Singhaniya90% (10)
- Special Electrical MachinesDocument62 pagesSpecial Electrical MachinesVineeth Valiyaveedu Vijayan100% (9)
- Line-Commutated and Active PWMDocument2 pagesLine-Commutated and Active PWMAnonymous HyOfbJ650% (2)
- MODEL - QU - Modeling and Analysis of Electrical Machines - Set1Document2 pagesMODEL - QU - Modeling and Analysis of Electrical Machines - Set1Bala Subramanian80% (5)
- Power Electronics Open Book ExamDocument4 pagesPower Electronics Open Book Examعبودي الامين100% (1)
- Experiment No 1speed Control of DC Motor Single Phase Half Wave Controlled RectifierDocument4 pagesExperiment No 1speed Control of DC Motor Single Phase Half Wave Controlled RectifierMohammed Dyhia Ali100% (2)
- Chapter 1 - Steady State Stability of Electric Drives - ModifiedDocument10 pagesChapter 1 - Steady State Stability of Electric Drives - ModifiedMohammad MunzirNo ratings yet
- Power Electronics Lab Indirect QuestionsDocument2 pagesPower Electronics Lab Indirect Questionssuriyamariappan0% (1)
- Multiple Choice Questions With Answers On Power Electronics and DrivesDocument3 pagesMultiple Choice Questions With Answers On Power Electronics and DrivesRaees AslamNo ratings yet
- Multi-Level Inverter - PPTDocument16 pagesMulti-Level Inverter - PPTSwami Kannu100% (1)
- GK Dubey Solutions of Electric DriveDocument8 pagesGK Dubey Solutions of Electric DriveReza P.E50% (4)
- Utilization of Electrical Energy Question Bank PDFDocument17 pagesUtilization of Electrical Energy Question Bank PDFKranthi Kumar100% (1)
- Chapter 3 Hydro Thermal SchedulingDocument65 pagesChapter 3 Hydro Thermal Schedulingbik_mesiloveNo ratings yet
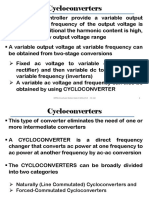
- Lecture 03 - CycloconvertersDocument29 pagesLecture 03 - CycloconvertersdaudiNo ratings yet
- 9.speed Control of DC Motor Using Chopper DriveDocument8 pages9.speed Control of DC Motor Using Chopper DriveDhivya N100% (1)
- Difference Between Static Relays and Electromagnetic RelaysDocument2 pagesDifference Between Static Relays and Electromagnetic Relayskriitka86% (7)
- Unit V Unit CommitmentDocument8 pagesUnit V Unit CommitmentDrAurobinda BagNo ratings yet
- Electrical Machine By Ashfaq Hussain PDFDocument14 pagesElectrical Machine By Ashfaq Hussain PDFAnjali Singh14% (7)
- Solution:Given That, Supply Voltage, V: AC MainsDocument17 pagesSolution:Given That, Supply Voltage, V: AC MainsDeepak Gehlot100% (1)
- Electrodynamic Instrument Operation and Torque EquationDocument9 pagesElectrodynamic Instrument Operation and Torque EquationNguyên Nguyễn SơnNo ratings yet
- Electric DrivesDocument15 pagesElectric DriveskalerusaNo ratings yet
- Electric Drives Concepts and Applications - Vedam Subrahmanyam PDFDocument85 pagesElectric Drives Concepts and Applications - Vedam Subrahmanyam PDFMilind MohapatraNo ratings yet
- Theory and Performance of Electrical Machines by JB Gupta PDFDocument4 pagesTheory and Performance of Electrical Machines by JB Gupta PDFMananbozdar0% (2)
- MRCET UG Model Question Papers on Electric & Hybrid VehiclesDocument8 pagesMRCET UG Model Question Papers on Electric & Hybrid VehiclesDilip KumarNo ratings yet
- EE8411-Electrical Machines Laboratory-II-Lab Manual PDFDocument80 pagesEE8411-Electrical Machines Laboratory-II-Lab Manual PDFkrishnandrk100% (2)
- Electrical Machines II Lab ManualDocument28 pagesElectrical Machines II Lab ManualAnith Krishnan83% (6)
- Power System Engineering Soni Gupta Bhatnagar PDFDocument2 pagesPower System Engineering Soni Gupta Bhatnagar PDFtech buddy0% (1)
- 1 Introduction To Electrical DrivesDocument45 pages1 Introduction To Electrical DrivesSetya Ardhi67% (3)
- Electrical Machine Design - A. K. SawhneyDocument97 pagesElectrical Machine Design - A. K. SawhneyShubham Pandya45% (11)
- Electrical Power System by Soni, Gupta and Bhatnagar Free DownloadDocument4 pagesElectrical Power System by Soni, Gupta and Bhatnagar Free DownloadShiva Paddam25% (4)
- Control System B.S.Manke PDFDocument222 pagesControl System B.S.Manke PDFvipul tiwary73% (52)
- Prof. Ch. SAI BABU: Online Gate Coaching ClassesDocument103 pagesProf. Ch. SAI BABU: Online Gate Coaching ClassesHarish B. M.100% (1)
- Synchronous MCQDocument8 pagesSynchronous MCQSamachar Nepali80% (5)
- Two Methods:: 1. Bus Building Algorithm 2. L-U Factorization of YDocument43 pagesTwo Methods:: 1. Bus Building Algorithm 2. L-U Factorization of Yudhayabarathi0% (1)
- Application of Modified Euler's Method in Obtaining Numerical Solution of Swing EquationDocument7 pagesApplication of Modified Euler's Method in Obtaining Numerical Solution of Swing EquationijsretNo ratings yet
- Electrical Machines Lab QuestionsDocument2 pagesElectrical Machines Lab Questionskarthikeyan75% (4)
- Unit - Ii Single Phase and Three Phase Controlled RectifiersDocument36 pagesUnit - Ii Single Phase and Three Phase Controlled RectifiersSukhpal Singh100% (2)
- Sreekavithaengineerig College: Scott Connection of TransformersDocument4 pagesSreekavithaengineerig College: Scott Connection of Transformersmandadi_saileshNo ratings yet
- Fundamentals of Electric Drives Sharkawi Solution ManualDocument8 pagesFundamentals of Electric Drives Sharkawi Solution ManualWildan Abdullah0% (1)
- Power Semiconductor Controlled Drives - Gopal K Dubey PDFDocument514 pagesPower Semiconductor Controlled Drives - Gopal K Dubey PDFLevingstan Yesudhas84% (103)
- Distributed Generation and Microgrid ControlDocument1 pageDistributed Generation and Microgrid ControlArivumani100% (1)
- Dynamic Behaviour of Electric Drives: Fundamental Torque EquationsDocument10 pagesDynamic Behaviour of Electric Drives: Fundamental Torque EquationsEthio Dangote TubeNo ratings yet
- Chapter Two EDDocument33 pagesChapter Two EDBiniyam DameneNo ratings yet
- CH2 ModifiedDocument11 pagesCH2 ModifiedBilisuma DamiteNo ratings yet
- Ee462 Chap 2 1Document35 pagesEe462 Chap 2 1PraiseNo ratings yet
- Dynamics of Electrical DrivesDocument34 pagesDynamics of Electrical DrivesAhmed HassonaNo ratings yet
- Utilization of Electrical Energy: Chapter 2: Electric Drives L-2-3Document21 pagesUtilization of Electrical Energy: Chapter 2: Electric Drives L-2-3Frozen BoyNo ratings yet
- Chapter Two Dynamics of Electric Drive SystemDocument30 pagesChapter Two Dynamics of Electric Drive SystemTony JamesNo ratings yet
- Distribution LineDocument1 pageDistribution LineBerihun EngdaNo ratings yet
- Bytes Internet and Repair Shop: Business PlanDocument8 pagesBytes Internet and Repair Shop: Business PlanBerihun EngdaNo ratings yet
- Funda AssignmentDocument1 pageFunda AssignmentBerihun EngdaNo ratings yet
- Eee-Vi-Electrical Machine Design (10ee63) - Notes PDFDocument208 pagesEee-Vi-Electrical Machine Design (10ee63) - Notes PDFManjunath84% (19)
- Induction Motor Main DocumentDocument37 pagesInduction Motor Main DocumentBerihun EngdaNo ratings yet
- Design of Twelve Pulse Rectifier Used in HVDC System 1398Document6 pagesDesign of Twelve Pulse Rectifier Used in HVDC System 1398Berihun EngdaNo ratings yet
- Free Enterprise Test AnswersDocument6 pagesFree Enterprise Test AnswersSupriyasingh16No ratings yet
- Business Plan For A Computer Repair CompanyDocument10 pagesBusiness Plan For A Computer Repair CompanyPetrinus Onuoha50% (2)
- Ac Single PhaseDocument35 pagesAc Single PhaseBerihun EngdaNo ratings yet
- 11 389 151703212566 72Document7 pages11 389 151703212566 72Berihun EngdaNo ratings yet
- Business Plan For Computer ShopDocument7 pagesBusiness Plan For Computer ShopMoun Socheat64% (33)
- Computer Repair Business PlanDocument31 pagesComputer Repair Business PlanBerihun Engda100% (1)
- Bytes Internet and Repair Shop: Business PlanDocument8 pagesBytes Internet and Repair Shop: Business PlanBerihun EngdaNo ratings yet
- Velocity and Static Force For Robot ArmDocument52 pagesVelocity and Static Force For Robot ArmBerihun EngdaNo ratings yet
- Cafe Bistro Business Plan for The WatertowerDocument21 pagesCafe Bistro Business Plan for The WatertowerBerihun Engda0% (1)
- Authomatic Speed Control and Accident Avoidance of VechileDocument29 pagesAuthomatic Speed Control and Accident Avoidance of VechileBerihun Engda100% (4)
- NOTEDocument1 pageNOTEBerihun EngdaNo ratings yet
- Alcohol Detector Using 8051 MCUDocument18 pagesAlcohol Detector Using 8051 MCUBerihun EngdaNo ratings yet
- 1) Answer: 13 Important Function of Purchasing Department of An OrganisationDocument21 pages1) Answer: 13 Important Function of Purchasing Department of An OrganisationBerihun EngdaNo ratings yet
- FireDocument56 pagesFireBerihun EngdaNo ratings yet
- Bissness PlanDocument3 pagesBissness PlanBerihun EngdaNo ratings yet
- Business Plan For A Computer Repair CompanyDocument10 pagesBusiness Plan For A Computer Repair CompanyPetrinus Onuoha50% (2)
- Entrepreneurship Misconceptions & Concepts ExplainedDocument21 pagesEntrepreneurship Misconceptions & Concepts ExplainedAayush AgnihotriNo ratings yet
- Business Plan For A Computer Repair CompanyDocument10 pagesBusiness Plan For A Computer Repair CompanyPetrinus Onuoha50% (2)
- Electronics Repair Shop Business PlanDocument34 pagesElectronics Repair Shop Business PlanBerihun EngdaNo ratings yet
- Application FormDocument4 pagesApplication FormBerihun EngdaNo ratings yet
- MAJOR REPORT Final (Main Content) - Arduino Based Bag Security SystemDocument64 pagesMAJOR REPORT Final (Main Content) - Arduino Based Bag Security Systemgigatek100% (2)
- Induction Motor (ALL TOPICS)Document33 pagesInduction Motor (ALL TOPICS)Ramprakash89% (18)
- Sandwich Shop Business PlanDocument24 pagesSandwich Shop Business PlanRasikakr86% (37)
- NegotiationDocument39 pagesNegotiatione2yc100% (3)
- En 13364 - 2001Document2 pagesEn 13364 - 2001Letícia Valdo0% (1)
- Create a Project Management Dashboard in ExcelDocument4 pagesCreate a Project Management Dashboard in ExcelImran Mulani100% (5)
- Brinsmade, El Latifundismo Mexicano, Su Origen y Su RemedioDocument265 pagesBrinsmade, El Latifundismo Mexicano, Su Origen y Su RemedioAnonymous iH3yyVw100% (1)
- M4NS-11d-71.1.2 Creating Problems Involving LCM With Reasonable AnswersDocument8 pagesM4NS-11d-71.1.2 Creating Problems Involving LCM With Reasonable AnswersMarjorie AnnNo ratings yet
- Admin, MPC13Document4 pagesAdmin, MPC13Federicó SchëlzerNo ratings yet
- English For Ethiopia: Grade 6Document3 pagesEnglish For Ethiopia: Grade 6Esrom Abebe100% (2)
- Mathematical-Olympiads PDFDocument27 pagesMathematical-Olympiads PDFG100% (1)
- Chapter 2 - PlanningDocument31 pagesChapter 2 - PlanningAlwiCheIsmailNo ratings yet
- Written ReportDocument14 pagesWritten ReportHansel TayongNo ratings yet
- A Baseline Document Is Defined As Any Official Document That Has Gone Through An Initial Approval Process and Was Approved For Use As IntendedDocument5 pagesA Baseline Document Is Defined As Any Official Document That Has Gone Through An Initial Approval Process and Was Approved For Use As Intendedprasanthp100% (2)
- Rapid Prototyping Question BankDocument2 pagesRapid Prototyping Question BankMeghavi ParmarNo ratings yet
- Q1 1 Nature Goals and Perspectives in of Anthropology Sociology and Political ScienceDocument44 pagesQ1 1 Nature Goals and Perspectives in of Anthropology Sociology and Political ScienceEfren Grenias JrNo ratings yet
- 1DA20ME435 Pramodraj D G. Agricultural Multi SprayerDocument27 pages1DA20ME435 Pramodraj D G. Agricultural Multi SprayerPramod RajNo ratings yet
- Gutter Design and Selection For Roof Rainwater Catchment SystemsDocument16 pagesGutter Design and Selection For Roof Rainwater Catchment SystemsMichael HiiNo ratings yet
- Xylux Lr3: High Output Emergency LED Luminaire Suitable For 10.8 Lux ApplicationsDocument4 pagesXylux Lr3: High Output Emergency LED Luminaire Suitable For 10.8 Lux ApplicationsAtiqNo ratings yet
- Answer THREE Questions.: (Part Marks)Document5 pagesAnswer THREE Questions.: (Part Marks)Roy VeseyNo ratings yet
- Manual de Feeder Gravimetrico PDFDocument0 pagesManual de Feeder Gravimetrico PDFEfrain SaldañaNo ratings yet
- Force Field AnalysisDocument4 pagesForce Field AnalysisrishiNo ratings yet
- Building Resilient Teams Workbook FINALDocument16 pagesBuilding Resilient Teams Workbook FINALКремена П.No ratings yet
- HZ Perc 1Document6 pagesHZ Perc 1Matia CamporaNo ratings yet
- Why Me?' The Problem of Chronic Pain After Surgery: JurnalDocument8 pagesWhy Me?' The Problem of Chronic Pain After Surgery: JurnalnurismafadhliahNo ratings yet
- EMT3-C10186 Manual (Rev. 1) W E-Stop and Throttle Pot (71610)Document17 pagesEMT3-C10186 Manual (Rev. 1) W E-Stop and Throttle Pot (71610)Matias Contreras Köbrich100% (2)
- Securities Crowdfunding Platform: Grow To ShareDocument17 pagesSecurities Crowdfunding Platform: Grow To ShareAditya Damar JatiNo ratings yet
- Gas Dynamics MCQsDocument6 pagesGas Dynamics MCQsprawinlNo ratings yet
- LA413001 PDC Intermittant Operation PDFDocument2 pagesLA413001 PDC Intermittant Operation PDFGino PierNo ratings yet
- Review Dasar Statistika Post-test AttemptDocument2 pagesReview Dasar Statistika Post-test AttemptBujo DesuNo ratings yet
- Manual: EMS-00186 Service Documentation and Software SystemsDocument555 pagesManual: EMS-00186 Service Documentation and Software SystemsJulia Kusova100% (2)
- Instruction Manual XPU-2 Option RS-232C / RS-485Document12 pagesInstruction Manual XPU-2 Option RS-232C / RS-485Thái NgọcNo ratings yet
- Sf1 - 2022 - Grade 9 (Year III) - MatipidDocument6 pagesSf1 - 2022 - Grade 9 (Year III) - MatipidJade LapazNo ratings yet
- Monthly and Bimonthly Engineering Journals (Emerging)Document3 pagesMonthly and Bimonthly Engineering Journals (Emerging)Abdul FattahNo ratings yet