You might also like
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- WECC Current Transformer GuideDocument49 pagesWECC Current Transformer GuideguntadiNo ratings yet
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsFrom EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo ratings yet
- Current Transformer GuideDocument79 pagesCurrent Transformer GuideUlaş Doğru100% (1)
- Selection of Current TrafoDocument18 pagesSelection of Current TrafoSuraj KumarNo ratings yet
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- WECC - White Paper On Relaying Current Transformer ApplicationDocument46 pagesWECC - White Paper On Relaying Current Transformer ApplicationsulemankhalidNo ratings yet
- Study of Current Transformer PDFDocument220 pagesStudy of Current Transformer PDFMukesh Kumar100% (2)
- Understanding Line Distance ProtectionDocument2 pagesUnderstanding Line Distance ProtectionRK KNo ratings yet
- Case Studies On Paralleling of TransformersDocument7 pagesCase Studies On Paralleling of Transformersmuaz_aminu1422No ratings yet
- Bushings for Power Transformers: A Handbook for Power EngineersFrom EverandBushings for Power Transformers: A Handbook for Power EngineersRating: 1 out of 5 stars1/5 (1)
- How Protect Capacitor BanksDocument7 pagesHow Protect Capacitor Banksbubo28No ratings yet
- b6 Testing Numerical Transformer Differential Relays Ieee1173Document40 pagesb6 Testing Numerical Transformer Differential Relays Ieee1173sasahitoNo ratings yet
- Current Transformer GuideDocument47 pagesCurrent Transformer GuideSrinivas KosuruNo ratings yet
- Testing Directional Overcurrent Protection: Test UniverseDocument23 pagesTesting Directional Overcurrent Protection: Test Universeyand_carlosNo ratings yet
- CT Saturation TestDocument4 pagesCT Saturation TestTara P. PradhanNo ratings yet
- Transmission Line ProtectionDocument31 pagesTransmission Line ProtectionJai Gupta100% (1)
- Protective Relay Coordination PDFDocument78 pagesProtective Relay Coordination PDFXabi AlonsoNo ratings yet
- CIRED2015 0448 Final PDFDocument5 pagesCIRED2015 0448 Final PDFRolando Henry Flores CamavilcaNo ratings yet
- Bus Bar Protection: External FaultsDocument4 pagesBus Bar Protection: External FaultsChanderSinghWarkadeNo ratings yet
- DC Short CKT CalculationDocument5 pagesDC Short CKT CalculationRavishankar.AzadNo ratings yet
- XR RatioDocument2 pagesXR RatioKunik Swaroop100% (1)
- Zero Sequence Impedance of Overhead Transmission LinesDocument11 pagesZero Sequence Impedance of Overhead Transmission LinesMohammed JavithNo ratings yet
- Use of RX Diagram in Relaying-GEDocument26 pagesUse of RX Diagram in Relaying-GES Naved Masood100% (2)
- Tertiary Winding of TransformerDocument3 pagesTertiary Winding of TransformerHamayoun MurtazaNo ratings yet
- Distance Protection of Series-Compensated Lines Problems and SolutionsDocument36 pagesDistance Protection of Series-Compensated Lines Problems and SolutionsfreddyriveraNo ratings yet
- Power System Protection - Part 08Document16 pagesPower System Protection - Part 08Rahul MandalNo ratings yet
- Ferroresonance Team PresentationDocument21 pagesFerroresonance Team PresentationPratik Ranjan100% (1)
- Zero Sequence ImpedanceDocument11 pagesZero Sequence ImpedanceBharat100% (1)
- TutorialTRVAlexander Dufournet PDFDocument41 pagesTutorialTRVAlexander Dufournet PDFDrAhmed EmamNo ratings yet
- Rja-Phasor Diagrams IiDocument20 pagesRja-Phasor Diagrams IiZaks MoreNo ratings yet
- Advanced Transformer ParallelingDocument6 pagesAdvanced Transformer ParallelingnicholasleeNo ratings yet
- Sympathetic Inrush CurrentDocument6 pagesSympathetic Inrush CurrentRajitha BoppaNo ratings yet
- Types of Neutral Earthing in Power Distribution - Electrical NotesDocument15 pagesTypes of Neutral Earthing in Power Distribution - Electrical Notessudipta_kolNo ratings yet
- Busbar ProtectionDocument42 pagesBusbar ProtectionShahzad Bhatti100% (2)
- Condition Monitoring Through DCRMDocument47 pagesCondition Monitoring Through DCRMgaurang1111No ratings yet
- STATCOM-ET - 10june-6aug ReportDocument37 pagesSTATCOM-ET - 10june-6aug ReportVamsi SwapnaNo ratings yet
- Protection Two Types Unit Non Unit Line Non Unit Type (Distance) Compare Unit Type Primary & Back - Up Protections Local Remote Zone of ProtectionDocument38 pagesProtection Two Types Unit Non Unit Line Non Unit Type (Distance) Compare Unit Type Primary & Back - Up Protections Local Remote Zone of ProtectionBhuvanes Waran100% (5)
- CT Polarity On SIPROTEC Quick StartDocument5 pagesCT Polarity On SIPROTEC Quick StartedgardNo ratings yet
- Example Overcurrent OvercurrentDirectional ENU PDFDocument25 pagesExample Overcurrent OvercurrentDirectional ENU PDFLaloui TayebNo ratings yet
- Knee Point Voltage of Current Transformer PS ClassDocument3 pagesKnee Point Voltage of Current Transformer PS Classrnmukerjee100% (1)
- Analysis of Oltc of Parallel TransformersDocument31 pagesAnalysis of Oltc of Parallel Transformersskylimit.skylimitNo ratings yet
- 9-Current TransformerDocument110 pages9-Current TransformermubarakkirkoNo ratings yet
- Cable Thermal Analysis Short Circuits EADocument19 pagesCable Thermal Analysis Short Circuits EAErsiAgoNo ratings yet
- LINEREV ProtectionDocument92 pagesLINEREV Protectionhafiz_hazreen100% (2)
- Broken Conductor Protection PDFDocument4 pagesBroken Conductor Protection PDFRandhir KumarNo ratings yet
- Over Fluxing in Transformer - Electrical EngineeringDocument5 pagesOver Fluxing in Transformer - Electrical Engineeringsriramv93No ratings yet
- Test Report For Numerical RelayDocument3 pagesTest Report For Numerical RelayrajiniNo ratings yet
- Current TransformerDocument6 pagesCurrent TransformerS M NaveedNo ratings yet
- S2-6-Calculating Circulating Currents in Clamping Strucure and Preventing Gassing Problem - Manan Pandya-Siemens - Rev1Document3 pagesS2-6-Calculating Circulating Currents in Clamping Strucure and Preventing Gassing Problem - Manan Pandya-Siemens - Rev1MallikarjunNo ratings yet
- Instruction Manual Directional Overcurrent Protection Relay Grd140 - XXXDDocument438 pagesInstruction Manual Directional Overcurrent Protection Relay Grd140 - XXXDEpsp MedNo ratings yet
- Restricted Earth Fault Protection of Transformer - REF ProtectionDocument4 pagesRestricted Earth Fault Protection of Transformer - REF Protectionpoornak47No ratings yet
- Design & Selection of Lightning ArresterDocument5 pagesDesign & Selection of Lightning ArresterAnkur_soni0% (1)
- Differential Protection FreshDocument10 pagesDifferential Protection FreshSaikat MahmudNo ratings yet
- Dual Three-Winding Transformer Equivalent Circuit Matching Leakage MeasurementsDocument9 pagesDual Three-Winding Transformer Equivalent Circuit Matching Leakage MeasurementsDiegoNo ratings yet
- Current Transformer Rev2Document17 pagesCurrent Transformer Rev2binodeNo ratings yet
- SLD 4Document1 pageSLD 4kjansaNo ratings yet
- Info EulaDocument7 pagesInfo EulaJan IsaNo ratings yet
- 1756 - RMDocument36 pages1756 - RMkjansaNo ratings yet
- Activation InstructionsDocument6 pagesActivation InstructionskjansaNo ratings yet
- Neutral Earthing ResistorsDocument6 pagesNeutral Earthing ResistorskjansaNo ratings yet
- RSL in X Classic GRGDocument48 pagesRSL in X Classic GRGkjansaNo ratings yet
- Micom P22 XDocument328 pagesMicom P22 XkjansaNo ratings yet
- Problem 4: Sizing A Transformer For Use in A Power System: ETAP Tutorial For Electric Machines ClassDocument7 pagesProblem 4: Sizing A Transformer For Use in A Power System: ETAP Tutorial For Electric Machines ClassChristopher RandallNo ratings yet
- SLD 3Document1 pageSLD 3kjansaNo ratings yet
- SLD 1Document1 pageSLD 1kjansaNo ratings yet
- SLD 2Document1 pageSLD 2kjansaNo ratings yet
- Er 300 NDocument46 pagesEr 300 NkjansaNo ratings yet
- SLD 3Document1 pageSLD 3kjansaNo ratings yet
- PSL Editor Commands Revison ADocument3 pagesPSL Editor Commands Revison AkjansaNo ratings yet
- P14 XDocument0 pagesP14 XkjansaNo ratings yet
- Micom P22 XDocument328 pagesMicom P22 XkjansaNo ratings yet
- Micom RelayDocument12 pagesMicom Relaytimlam11No ratings yet
- How To Use IEC 61850 in Protection and AutomationDocument11 pagesHow To Use IEC 61850 in Protection and AutomationluhusapaNo ratings yet
- User Experiences Implementing IEC61850Document3 pagesUser Experiences Implementing IEC61850Victor Ismael RomeroNo ratings yet
- P64 XXDocument794 pagesP64 XXkjansaNo ratings yet
- P14 XDocument0 pagesP14 XkjansaNo ratings yet
- Em 6400Document6 pagesEm 6400chetanmahulkar755374No ratings yet
- SYNC 2000 - Quick Start GuideDocument2 pagesSYNC 2000 - Quick Start Guidekjansa100% (3)
- Bdew RL Ea Am Ms Netz EnglDocument130 pagesBdew RL Ea Am Ms Netz EnglAqeel Bhat100% (1)
- Austin Hughes and Bill Drury (Auth.) Electric Motors and Drives. Fundamentals, Types and Applications 2013Document123 pagesAustin Hughes and Bill Drury (Auth.) Electric Motors and Drives. Fundamentals, Types and Applications 2013megamaster2010No ratings yet
- Excitation SystemsDocument17 pagesExcitation SystemsdceylNo ratings yet
- Chapter 2 Mat455Document36 pagesChapter 2 Mat455Ajaq 98No ratings yet
- Dubbel Handbook of Mechanical Engineering PDFDocument918 pagesDubbel Handbook of Mechanical Engineering PDFprajakt_pie50% (4)
- Me402 HW 4 Finals PDFDocument1 pageMe402 HW 4 Finals PDFMikko Omaña0% (2)
- 2017 Karomi IBPh DDocument155 pages2017 Karomi IBPh DGeorge FiliosNo ratings yet
- Inductor and Flyback Transformer DesignDocument20 pagesInductor and Flyback Transformer Designbmmostefa100% (1)
- Chapter 1 - MsiDocument81 pagesChapter 1 - MsiYua CincoNo ratings yet
- Savelyev I.V.-Physics - A General Course. Volume III (1989) PDFDocument159 pagesSavelyev I.V.-Physics - A General Course. Volume III (1989) PDFSuper OMG GamerNo ratings yet
- Emtl Question Bank Imp QsDocument9 pagesEmtl Question Bank Imp QsSri MurthyNo ratings yet
- Uee Bits PDFDocument18 pagesUee Bits PDFSurapu.Sri ganeshNo ratings yet
- What Is Matrix EnergeticsDocument3 pagesWhat Is Matrix EnergeticsJill Paxton100% (1)
- DVV TDocument6 pagesDVV TLiviu ToaderNo ratings yet
- ChemDocument4 pagesChemdebabrata_nagNo ratings yet
- EAMCET Engineering Information BrochureDocument23 pagesEAMCET Engineering Information BrochureAnweshaBoseNo ratings yet
- Veer Surendra Sai University of Technology:Orissa: Syllabus For First Year B.TechDocument24 pagesVeer Surendra Sai University of Technology:Orissa: Syllabus For First Year B.TechSohamsi BeheraNo ratings yet
- Om0408 MS2 PDFDocument72 pagesOm0408 MS2 PDFRuqayyahAL-FurqanNo ratings yet
- Beam Calculator Online (Calculate The Reactions, Draws Bending Moment, Shear Force, Axial Force) PDFDocument5 pagesBeam Calculator Online (Calculate The Reactions, Draws Bending Moment, Shear Force, Axial Force) PDFEngr Ishfaque TunioNo ratings yet
- Dynamic Stability Analysis of A Tethered AerostatDocument8 pagesDynamic Stability Analysis of A Tethered AerostatNick SetarNo ratings yet
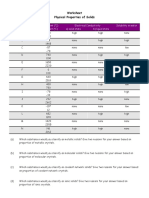
- 8 WORKSHEET Properties of SolidsDocument1 page8 WORKSHEET Properties of Solidskomal sheikhNo ratings yet
- Analysis of Hull ResistanceDocument6 pagesAnalysis of Hull ResistanceSahil JawaNo ratings yet
- Multiple Choice Test:1Document3 pagesMultiple Choice Test:1ldNo ratings yet
- PP On 132/33 KV Sub-Station at Mohaddipur GorakhpurDocument17 pagesPP On 132/33 KV Sub-Station at Mohaddipur GorakhpurAbrar Ahmad63% (8)
- 003 - Option B Chapter 14 Engineering Physics PDFDocument62 pages003 - Option B Chapter 14 Engineering Physics PDFyuke kristinaNo ratings yet
- NMR SplittingDocument36 pagesNMR SplittingsabbysamuraNo ratings yet
- Sample ProblemsDocument3 pagesSample ProblemsJulius CagampangNo ratings yet
- Shake91 Input User ManualDocument34 pagesShake91 Input User Manualyoki_triwahyudiNo ratings yet
- Physics ReviewerDocument18 pagesPhysics ReviewerTrisha ConcepcionNo ratings yet
- Lame ConstantsDocument2 pagesLame ConstantsAldi NurseptaNo ratings yet
- Digital Power Clamp Meter HIOKI 3286Document4 pagesDigital Power Clamp Meter HIOKI 3286industrialindiaNo ratings yet
- Introducing Rheology - Sep 2017Document34 pagesIntroducing Rheology - Sep 2017Daniel Perez ColmenaresNo ratings yet
- Practice Problems For Exam 1 Spring 2023Document5 pagesPractice Problems For Exam 1 Spring 2023Sania MurtuzaNo ratings yet
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- RV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!From EverandRV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!No ratings yet
- Renewable Energy: A Very Short IntroductionFrom EverandRenewable Energy: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (12)
- A Pathway to Decarbonise the Shipping Sector by 2050From EverandA Pathway to Decarbonise the Shipping Sector by 2050No ratings yet
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsFrom EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsRating: 4.5 out of 5 stars4.5/5 (2)
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)
- The Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceFrom EverandThe Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceNo ratings yet
- Heat Transfer Engineering: Fundamentals and TechniquesFrom EverandHeat Transfer Engineering: Fundamentals and TechniquesRating: 4 out of 5 stars4/5 (1)
- Practical Reservoir Engineering and CharacterizationFrom EverandPractical Reservoir Engineering and CharacterizationRating: 4.5 out of 5 stars4.5/5 (3)
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successFrom EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successRating: 4.5 out of 5 stars4.5/5 (3)
- Fundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsFrom EverandFundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsNo ratings yet
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsFrom EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNo ratings yet
- Renewable Energy Sources - Wind, Solar and Hydro Energy Revised Edition : Environment Books for Kids | Children's Environment BooksFrom EverandRenewable Energy Sources - Wind, Solar and Hydro Energy Revised Edition : Environment Books for Kids | Children's Environment BooksNo ratings yet
- An Introduction to Renewable Energy Sources : Environment Books for Kids | Children's Environment BooksFrom EverandAn Introduction to Renewable Energy Sources : Environment Books for Kids | Children's Environment BooksNo ratings yet
- Global Landscape of Renewable Energy FinanceFrom EverandGlobal Landscape of Renewable Energy FinanceNo ratings yet
- Live Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerFrom EverandLive Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerNo ratings yet
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977From EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977No ratings yet
- Idaho Falls: The Untold Story of America's First Nuclear AccidentFrom EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentRating: 4.5 out of 5 stars4.5/5 (21)
- Electric Motors and Drives: Fundamentals, Types and ApplicationsFrom EverandElectric Motors and Drives: Fundamentals, Types and ApplicationsRating: 4.5 out of 5 stars4.5/5 (12)
- Grid-Scale Energy Storage Systems and ApplicationsFrom EverandGrid-Scale Energy Storage Systems and ApplicationsFu-Bao WuNo ratings yet
- Practical Methods for Analysis and Design of HV Installation Grounding SystemsFrom EverandPractical Methods for Analysis and Design of HV Installation Grounding SystemsRating: 4.5 out of 5 stars4.5/5 (2)