You might also like
- Converting Units of Measure PDFDocument23 pagesConverting Units of Measure PDFM Faisal ChNo ratings yet
- Radical Acceptance Guided Meditations by Tara Brach PDFDocument3 pagesRadical Acceptance Guided Meditations by Tara Brach PDFQuzzaq SebaNo ratings yet
- Nicolas-Lewis vs. ComelecDocument3 pagesNicolas-Lewis vs. ComelecJessamine OrioqueNo ratings yet
- Integrating GrammarDocument8 pagesIntegrating GrammarMaría Perez CastañoNo ratings yet
- Feynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterFrom EverandFeynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterNo ratings yet
- PNP P.A.T.R.O.L. 2030 Score Card Dashboard FormulationDocument89 pagesPNP P.A.T.R.O.L. 2030 Score Card Dashboard FormulationMark Payumo83% (41)
- Limitations For The Study: Celebrity ViewsDocument3 pagesLimitations For The Study: Celebrity ViewsPakaya100% (2)
- Em-I Digital Notes Latest-EeeDocument119 pagesEm-I Digital Notes Latest-EeeSIDDHANT SAHUNo ratings yet
- Fisika GelombangDocument6 pagesFisika GelombangDwi Puspita SariNo ratings yet
- Second Order TransientsDocument6 pagesSecond Order Transientsmusy1233No ratings yet
- Analysis of Electrical Machines BankDocument66 pagesAnalysis of Electrical Machines BankChilambarasan MadhappanNo ratings yet
- Assignment TheoryDocument11 pagesAssignment TheoryChomfwix VlogsNo ratings yet
- Assignment 3Document15 pagesAssignment 3Jofy GeorgeNo ratings yet
- Assignment 3Document3 pagesAssignment 3SarthakNo ratings yet
- P5 2-Sensor2011Document6 pagesP5 2-Sensor2011Gokul VenugopalNo ratings yet
- Lecture Presentation 1Document105 pagesLecture Presentation 1Ahmet SancakNo ratings yet
- Trans LinesDocument8 pagesTrans LinesariehashimieNo ratings yet
- Chaotic Behaviour of Atomic Energy LevelsDocument7 pagesChaotic Behaviour of Atomic Energy LevelsDele AdigunNo ratings yet
- Isotype Junctions, Modulation Doping, and Quantum EffectsDocument4 pagesIsotype Junctions, Modulation Doping, and Quantum EffectsprashantsheetalNo ratings yet
- Basic network elements and their propertiesDocument7 pagesBasic network elements and their propertiesarpit sharmaNo ratings yet
- 1502957604lectrure 11 12 13 KUETDocument35 pages1502957604lectrure 11 12 13 KUETAnikaNo ratings yet
- 19 - Capacitance Contribution To Synchronous Buck Converter LossesDocument5 pages19 - Capacitance Contribution To Synchronous Buck Converter LossesWesley de PaulaNo ratings yet
- Design of Rogowski Coil With IntegratorDocument32 pagesDesign of Rogowski Coil With IntegratorrichatNo ratings yet
- 27-Metals 2Document24 pages27-Metals 2Saeed SadatNo ratings yet
- Ideal Fermi Gas: 13.1 Equation of StateDocument14 pagesIdeal Fermi Gas: 13.1 Equation of StateShalltear BloodFallenNo ratings yet
- PH8103 Presentation 3Document13 pagesPH8103 Presentation 3Rishav SaikiaNo ratings yet
- I R ResponseDocument5 pagesI R ResponseRicardo Villagómez TamezNo ratings yet
- The Kosterlitz-Thouless TransitionDocument14 pagesThe Kosterlitz-Thouless TransitionKenzaNo ratings yet
- Computation of Electromagnetic Fields For 220 KV Power Line in Cartagena de Indias PDFDocument12 pagesComputation of Electromagnetic Fields For 220 KV Power Line in Cartagena de Indias PDFJesusCastroNo ratings yet
- Quantum Mechanics Course ZeemansplittingDocument29 pagesQuantum Mechanics Course ZeemansplittingjlbalbNo ratings yet
- Chap30 PHY2049Document22 pagesChap30 PHY2049Ashish ParasharNo ratings yet
- EmonopolDocument3 pagesEmonopolFlavio FontanaNo ratings yet
- Electromechanics of A Solenoid MatlabDocument5 pagesElectromechanics of A Solenoid MatlabsnthejNo ratings yet
- MIT8 333F13 Pset5Document9 pagesMIT8 333F13 Pset5Henry De AriesNo ratings yet
- Optical Fiber Signals Propagation GuideDocument80 pagesOptical Fiber Signals Propagation Guidesrividya.lNo ratings yet
- Champ Elect QQD 2014Document20 pagesChamp Elect QQD 2014hhakim32No ratings yet
- Interface Between The Liov and EMTP-RV BorghettiDocument33 pagesInterface Between The Liov and EMTP-RV BorghettitagayeNo ratings yet
- LIKHAREVDocument24 pagesLIKHAREVdavid zilbermanNo ratings yet
- Solid State Physics Homework ProblemsDocument4 pagesSolid State Physics Homework Problemsd1a4ppNo ratings yet
- Fisica Del Est. Solido-Guia 01-19-IIDocument2 pagesFisica Del Est. Solido-Guia 01-19-IIMayra Alejandra Cunyarache JimenezNo ratings yet
- RLC Diode NetworksDocument20 pagesRLC Diode NetworksVikash SharmaNo ratings yet
- The Quantum Theory of Atoms - Spectroscopy in BoxesDocument20 pagesThe Quantum Theory of Atoms - Spectroscopy in Boxesfun toNo ratings yet
- Using The Green's Function Method To Analyse The Response of An Infinite Wire On Visco-Elastic Foundationn N Visco-ElasticDocument4 pagesUsing The Green's Function Method To Analyse The Response of An Infinite Wire On Visco-Elastic Foundationn N Visco-ElasticTraian MaziluNo ratings yet
- Ch 8 Magnetic Field of a Circular Current LoopDocument21 pagesCh 8 Magnetic Field of a Circular Current LoopAde Nur HidayatNo ratings yet
- Dielectric Slab Waveguide: 1 Total Internal ReflectionDocument3 pagesDielectric Slab Waveguide: 1 Total Internal Reflectionjas dwanNo ratings yet
- Practical Quadrupole Theory: Graphical Theory: Randall E. PedderDocument5 pagesPractical Quadrupole Theory: Graphical Theory: Randall E. PedderMohammadNo ratings yet
- Physics For Engineers LabDocument6 pagesPhysics For Engineers LabRe NacionNo ratings yet
- Outline of Solutions To Homework 5Document5 pagesOutline of Solutions To Homework 5Jordan MoshcovitisNo ratings yet
- Formula Sheet 1Document4 pagesFormula Sheet 1Abhimanyu DwivediNo ratings yet
- Non-Equilibrium Green's Function Calculation of Optical Absorption in Nano Optoelectronic DevicesDocument4 pagesNon-Equilibrium Green's Function Calculation of Optical Absorption in Nano Optoelectronic DevicesOka Kurniawan100% (2)
- General Physics CH 23Document31 pagesGeneral Physics CH 23Wei HuangNo ratings yet
- Diklic_TNSDocument17 pagesDiklic_TNSJosipa DiklićNo ratings yet
- Infrared SpectrosDocument10 pagesInfrared Spectrostran thi thuy duongNo ratings yet
- Ublatt12 enDocument2 pagesUblatt12 enSanziana SteleaNo ratings yet
- Lecture 3Document42 pagesLecture 3Rithik JainNo ratings yet
- Equation SheetDocument4 pagesEquation SheetBhaskar TupteNo ratings yet
- Thomas-Fermi Kinetic Energy Functionals for Electron DensitiesDocument7 pagesThomas-Fermi Kinetic Energy Functionals for Electron DensitiesVirgilio QuaresimaNo ratings yet
- 0039 - Cable and Membrane: DescriptionDocument4 pages0039 - Cable and Membrane: DescriptionmishikhanNo ratings yet
- Mathematical Aspects of Simulating Efficient RF Operation of HemtsDocument9 pagesMathematical Aspects of Simulating Efficient RF Operation of HemtsGennadiyNo ratings yet
- Rasheef Maths AssignmantDocument10 pagesRasheef Maths AssignmantMohamed SanoosNo ratings yet
- SCHR Odinger Equation For Central Potentials: 2.1 Variable SeparationDocument9 pagesSCHR Odinger Equation For Central Potentials: 2.1 Variable SeparationJUAN SEBASTIÁN RAMÍREZ QUINTERONo ratings yet
- Qus., Bank With Ans., Part A & B PDFDocument52 pagesQus., Bank With Ans., Part A & B PDFBala SreedharanNo ratings yet
- PHY 137A (D. Budker) Midterm 2 SolutionsDocument3 pagesPHY 137A (D. Budker) Midterm 2 SolutionshonestcheaterNo ratings yet
- Electromagnetic Excel Era TorsDocument2 pagesElectromagnetic Excel Era TorsbaguadragonNo ratings yet
- Attenuation Factor for TE Waves in Parallel PlanesDocument4 pagesAttenuation Factor for TE Waves in Parallel PlanesYousuff Nasar HajaNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Monitoreo SAPDocument6 pagesMonitoreo SAPDiegoNo ratings yet
- WelcomeDocument5 pagesWelcomeCatNo ratings yet
- InteriorDocument22 pagesInteriorPurna YalamanchiliNo ratings yet
- Reinforced Concrete Design (Limit State) - by Varghese P.C.Document566 pagesReinforced Concrete Design (Limit State) - by Varghese P.C.Yuva Raj95% (37)
- S.No. Description of Item Unit Quantity PriceDocument2 pagesS.No. Description of Item Unit Quantity PricePurna YalamanchiliNo ratings yet
- PaintDocument1 pagePaintPurna YalamanchiliNo ratings yet
- Block A LucknowDocument1 pageBlock A LucknowPurna YalamanchiliNo ratings yet
- High WaysDocument5 pagesHigh WaysPurna YalamanchiliNo ratings yet
- Age Character CalculationDocument2 pagesAge Character CalculationPurna YalamanchiliNo ratings yet
- Age Character CalculationDocument2 pagesAge Character CalculationPurna YalamanchiliNo ratings yet
- MSPL Check ListDocument1 pageMSPL Check ListPurna YalamanchiliNo ratings yet
- Come Grow With Us, Like UsDocument7 pagesCome Grow With Us, Like Usanubhaw2004No ratings yet
- English TestDocument23 pagesEnglish Testಸುಹಾಸ ಎNo ratings yet
- Usharama Jntu Kakinada Eee SyllabusDocument85 pagesUsharama Jntu Kakinada Eee SyllabussambhanimadhubabuNo ratings yet
- Assalamu'alaikum WR WB.: Emcee Script (1) Pre - AnnouncementDocument3 pagesAssalamu'alaikum WR WB.: Emcee Script (1) Pre - AnnouncementGian AlfaNo ratings yet
- Classroom Rules and RegulationsDocument1 pageClassroom Rules and RegulationsASHYJO28No ratings yet
- LAWHIST - Week1 - Codamon Lim Tan PDFDocument32 pagesLAWHIST - Week1 - Codamon Lim Tan PDFMargell TanNo ratings yet
- 1402 2046Document11 pages1402 2046Luca PilottiNo ratings yet
- All Projects Should Be Typed On A4 SheetsDocument3 pagesAll Projects Should Be Typed On A4 SheetsNikita AgrawalNo ratings yet
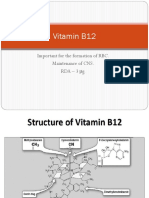
- Vitamin B12: Essential for RBC Formation and CNS MaintenanceDocument19 pagesVitamin B12: Essential for RBC Formation and CNS MaintenanceHari PrasathNo ratings yet
- Course Outline Physics EducationDocument3 pagesCourse Outline Physics EducationTrisna HawuNo ratings yet
- English Vocabulary For MedicineDocument5 pagesEnglish Vocabulary For MedicineDentistryuv 2020100% (1)
- Med 07Document5 pagesMed 07ainee dazaNo ratings yet
- Red ProjectDocument30 pagesRed ProjectApoorva SrivastavaNo ratings yet
- Edu 510 Final ProjectDocument13 pagesEdu 510 Final Projectapi-324235159No ratings yet
- Review Unit 10 Test CHP 17Document13 pagesReview Unit 10 Test CHP 17TechnoKittyKittyNo ratings yet
- 01 Oh OverviewDocument50 pages01 Oh OverviewJaidil YakopNo ratings yet
- ReportDocument7 pagesReportapi-482961632No ratings yet
- Chapter 7 Project Cost ManagementDocument48 pagesChapter 7 Project Cost Managementafifah suyadiNo ratings yet
- Photojournale - Connections Across A Human PlanetDocument75 pagesPhotojournale - Connections Across A Human PlanetjohnhorniblowNo ratings yet
- John R. Van Wazer's concise overview of phosphorus compound nomenclatureDocument7 pagesJohn R. Van Wazer's concise overview of phosphorus compound nomenclatureFernanda Stuani PereiraNo ratings yet
- Unit 3 Activity 1-1597187907Document3 pagesUnit 3 Activity 1-1597187907Bryan SaltosNo ratings yet
- CvSU Vision and MissionDocument2 pagesCvSU Vision and MissionJoshua LagonoyNo ratings yet
- De Broglie's Hypothesis: Wave-Particle DualityDocument4 pagesDe Broglie's Hypothesis: Wave-Particle DualityAvinash Singh PatelNo ratings yet
- M5-2 CE 2131 Closed Traverse - Interior Angles V2021Document19 pagesM5-2 CE 2131 Closed Traverse - Interior Angles V2021Kiziahlyn Fiona BibayNo ratings yet
- New Titles List 2014, Issue 1Document52 pagesNew Titles List 2014, Issue 1Worldwide Books CorporationNo ratings yet
- New GK PDFDocument3 pagesNew GK PDFkbkwebsNo ratings yet
- A Study of Outdoor Interactional Spaces in High-Rise HousingDocument13 pagesA Study of Outdoor Interactional Spaces in High-Rise HousingRekha TanpureNo ratings yet