You might also like
- Os Unit-1 (Bca)Document54 pagesOs Unit-1 (Bca)Bot IdNo ratings yet
- Operating Systems Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesFrom EverandOperating Systems Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesNo ratings yet
- Unit1 - Introduction To OSDocument7 pagesUnit1 - Introduction To OSAdarsh PandeyNo ratings yet
- Chapter 2Document3 pagesChapter 2Abhi RajNo ratings yet
- Program Execution: Operating System System Operating Systems SystemsDocument3 pagesProgram Execution: Operating System System Operating Systems SystemsMUHAMMAD ATTIQUENo ratings yet
- An Operating SystemDocument27 pagesAn Operating Systemlandry NowaruhangaNo ratings yet
- Operating Systems Notes by S DhallDocument124 pagesOperating Systems Notes by S DhallSALMAN KHANNo ratings yet
- OS Chapter 1Document19 pagesOS Chapter 1root18No ratings yet
- Operating System QBDocument12 pagesOperating System QBsamratbhandari702No ratings yet
- Unit 4 Operating SystemDocument11 pagesUnit 4 Operating Systemmanish sharmaNo ratings yet
- Operating System TutorialDocument64 pagesOperating System TutorialSuraj RamolaNo ratings yet
- Unit OneDocument13 pagesUnit OneAkshat JainNo ratings yet
- Operating System - Services: Program ExecutionDocument3 pagesOperating System - Services: Program ExecutionMd. Ebna Amir Foysal 152-35-1147No ratings yet
- Operating Systems Concepts: Lecture 1 - IntroductionDocument18 pagesOperating Systems Concepts: Lecture 1 - IntroductionRashda KhanzadaNo ratings yet
- Operating System Lecture Note Module-1Document32 pagesOperating System Lecture Note Module-1Kefelegn GulintNo ratings yet
- Unit-1 Python New 2020Document17 pagesUnit-1 Python New 2020devNo ratings yet
- OS NotesDocument8 pagesOS NotesPritam KiskuNo ratings yet
- Chapter-01 (Operating Systems Fundamentals) Dr. Sheeraz Arif (Assoc. Professor) Operating SystemDocument9 pagesChapter-01 (Operating Systems Fundamentals) Dr. Sheeraz Arif (Assoc. Professor) Operating SystemSheeraz ArifNo ratings yet
- OS interface hardware software usersDocument73 pagesOS interface hardware software usersJoshNo ratings yet
- Fundamentals of Cyber Security 2Document52 pagesFundamentals of Cyber Security 2fayyadmuhammad45No ratings yet
- OS Structures and ServicesDocument9 pagesOS Structures and ServicesFS19IF044No ratings yet
- Chapter 1: Overview of Operating System 1. What Is Operating System?Document9 pagesChapter 1: Overview of Operating System 1. What Is Operating System?mehariNo ratings yet
- Operating System NotesDocument61 pagesOperating System Notespayal bhorNo ratings yet
- Chapter1 IntroductionDocument40 pagesChapter1 IntroductionDeep ChavanNo ratings yet
- Os 101 NotesDocument102 pagesOs 101 Notesvg0No ratings yet
- Operating System - Module IDocument12 pagesOperating System - Module IppghoshinNo ratings yet
- Os Guides 1-2Document24 pagesOs Guides 1-2x 4 dNo ratings yet
- AOS 1-6 CompilationDocument86 pagesAOS 1-6 CompilationALEXANDRA JARANo ratings yet
- OS and NW BasicDocument64 pagesOS and NW BasicApurva SinghNo ratings yet
- Operating SystemDocument6 pagesOperating SystemmugwadiinnocentNo ratings yet
- Components of Operating SystemDocument6 pagesComponents of Operating SystemVaibhav PearsonNo ratings yet
- An Operating SystemDocument97 pagesAn Operating SystemBaptist GHNo ratings yet
- OS Unit-1 NotesDocument23 pagesOS Unit-1 Notesanjali sowmyaNo ratings yet
- Unit 1 Overview of Operating SystemDocument16 pagesUnit 1 Overview of Operating SystemAditya BorleNo ratings yet
- TRB Study Materials Operating System: WWW - Governmentexams.co - in 1Document9 pagesTRB Study Materials Operating System: WWW - Governmentexams.co - in 1Jeyaraman DhanarajNo ratings yet
- Chapter 1Document33 pagesChapter 1dejenehundaol91No ratings yet
- Operating SystemDocument14 pagesOperating SystemPrajwal NiroulaNo ratings yet
- Computer Software ClassificationDocument14 pagesComputer Software ClassificationStar Boy DavieNo ratings yet
- IBPS SO OS Study NotesDocument23 pagesIBPS SO OS Study NotesSaadNo ratings yet
- Ict ProjectDocument16 pagesIct Projectpshantanu123No ratings yet
- Introduction of Operating SystemDocument21 pagesIntroduction of Operating SystemVaishnavi RajputNo ratings yet
- OS Interface Hardware SoftwareDocument10 pagesOS Interface Hardware SoftwareRajeswaranaidu DarsiNo ratings yet
- Os R19 - Unit-1Document26 pagesOs R19 - Unit-1Ranadheer BjskNo ratings yet
- Operating System CompleteDocument59 pagesOperating System CompleteJasperFabella100% (1)
- OSDocument100 pagesOSSonu LakraNo ratings yet
- Study About Operating System and Its Types.Document3 pagesStudy About Operating System and Its Types.08BSc.ITARNAV PATELNo ratings yet
- Operating SystemDocument40 pagesOperating Systempachchu31No ratings yet
- Monograph On Operating System Author DR Mamta Bansal RajshreeDocument73 pagesMonograph On Operating System Author DR Mamta Bansal RajshreevvasileNo ratings yet
- Operating Systems - Unit-1Document28 pagesOperating Systems - Unit-1Srija GNo ratings yet
- Operating Systems NotesDocument61 pagesOperating Systems NotesGumzz LeoNo ratings yet
- A1841452586_23631_5_2019_Unit 1 introduction to osDocument65 pagesA1841452586_23631_5_2019_Unit 1 introduction to osnotorioussamenNo ratings yet
- CompatibilitymodeDocument42 pagesCompatibilitymodeAnil KumarNo ratings yet
- Introduction to Operating SystemsDocument19 pagesIntroduction to Operating SystemsANSHUL MANGLANo ratings yet
- CSE 4th - OSDocument68 pagesCSE 4th - OSPrajwal MeshramNo ratings yet
- Unit 2 - Operating System StructuresDocument51 pagesUnit 2 - Operating System Structuresyuki tetsuNo ratings yet
- Unit - 2 Operating SystemsDocument17 pagesUnit - 2 Operating Systemsimran hameerNo ratings yet
- Unit 1Document28 pagesUnit 1Girish KhedikarNo ratings yet
- OSINTRODocument25 pagesOSINTROlovishsindhwaniNo ratings yet
- Unit I J1Document7 pagesUnit I J1adityapawar1865No ratings yet
- Alc10 DatasheetDocument7 pagesAlc10 Datasheetd4l170No ratings yet
- 12 Animation Q1 AnswerDocument38 pages12 Animation Q1 AnswerBilly Joe TanNo ratings yet
- Propeller forces and typesDocument2 pagesPropeller forces and typesEdison Gutierrez CapunoNo ratings yet
- Rochor Station Pile Design CalculationsDocument15 pagesRochor Station Pile Design CalculationsDifa LiuNo ratings yet
- Tech Note 14Document2 pagesTech Note 14meteohrNo ratings yet
- Transportation Planning ProcessDocument43 pagesTransportation Planning ProcessAncheta Suzanne ClarisseNo ratings yet
- CH 07Document27 pagesCH 07Jessica Ibarreta100% (1)
- Hydrocarbons NotesDocument15 pagesHydrocarbons Notesarjunrkumar2024No ratings yet
- Drager Fabius Gs Technical Service ManualDocument350 pagesDrager Fabius Gs Technical Service ManualLeonardo Chirinos100% (3)
- Ikan Di Kepualauan Indo-AustraliaDocument480 pagesIkan Di Kepualauan Indo-AustraliaDediNo ratings yet
- Gabion Retaining Wall Design GuideDocument30 pagesGabion Retaining Wall Design GuideThomas Hill80% (5)
- ISO 8243 2013 Cigarettes - SamplingDocument18 pagesISO 8243 2013 Cigarettes - SamplingEko YuliantoNo ratings yet
- Introducing WESAD, A Multimodal Dataset For Wearable Stress and Affect DetectionDocument9 pagesIntroducing WESAD, A Multimodal Dataset For Wearable Stress and Affect DetectionJhónatan CarranzaNo ratings yet
- NewsDocument26 pagesNewsMaria Jose Soliz OportoNo ratings yet
- Stereochemistry Practce PDFDocument6 pagesStereochemistry Practce PDFFerminNo ratings yet
- ID Pengaruh Persistensi Laba Alokasi Pajak Antar Periode Ukuran Perusahaan PertumbuDocument21 pagesID Pengaruh Persistensi Laba Alokasi Pajak Antar Periode Ukuran Perusahaan PertumbuGheaMarisyaPuteriNo ratings yet
- Pub - The Physics of The Standard Model and Beyond PDFDocument314 pagesPub - The Physics of The Standard Model and Beyond PDFEduardo Gareca100% (2)
- GX-2009 - Personal Multigas Detector. Operator's Manual (RKI, 2009)Document64 pagesGX-2009 - Personal Multigas Detector. Operator's Manual (RKI, 2009)Stasio80No ratings yet
- Measurements/ Specifications: Torque Wrench Selection GuideDocument5 pagesMeasurements/ Specifications: Torque Wrench Selection GuideSylvester RakgateNo ratings yet
- Lecture 1: Encoding Language: LING 1330/2330: Introduction To Computational Linguistics Na-Rae HanDocument18 pagesLecture 1: Encoding Language: LING 1330/2330: Introduction To Computational Linguistics Na-Rae HanLaura AmwayiNo ratings yet
- Five Factors of CleaningDocument2 pagesFive Factors of CleaningKimberly Bruce De CastroNo ratings yet
- General 04 Fixed Flow Pump To Three TanksDocument13 pagesGeneral 04 Fixed Flow Pump To Three TanksjpalauguillemNo ratings yet
- Scramjet EngineDocument2 pagesScramjet EngineSãröj ShâhNo ratings yet
- Eltek PSR 327Document2 pagesEltek PSR 327fan liuNo ratings yet
- ASTM D 1510 - 02 Carbon Black-Iodine Adsorption NumberDocument7 pagesASTM D 1510 - 02 Carbon Black-Iodine Adsorption Numberalin2005100% (1)
- Probability Statistics and Random Processes Third Edition T Veerarajan PDFDocument3 pagesProbability Statistics and Random Processes Third Edition T Veerarajan PDFbhavyamNo ratings yet
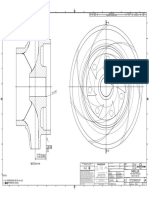
- Impeller: REV Rev by Description PCN / Ecn Date CHK'D A JMM Released For Production N/A 18/11/2019 PDLDocument1 pageImpeller: REV Rev by Description PCN / Ecn Date CHK'D A JMM Released For Production N/A 18/11/2019 PDLSenthilkumar RamalingamNo ratings yet
- Instrument Resume OIL and GAS.Document3 pagesInstrument Resume OIL and GAS.RTI PLACEMENT CELLNo ratings yet
- Cross Belt Magnetic Separator (CBMS)Document2 pagesCross Belt Magnetic Separator (CBMS)mkbhat17kNo ratings yet
- Superalloy Brochure PDFDocument16 pagesSuperalloy Brochure PDFDaren NeradNo ratings yet
- Make Your PC Stable and Fast: What Microsoft Forgot to Tell YouFrom EverandMake Your PC Stable and Fast: What Microsoft Forgot to Tell YouRating: 4 out of 5 stars4/5 (1)
- The Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireFrom EverandThe Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireNo ratings yet
- The Linux Command Line Beginner's GuideFrom EverandThe Linux Command Line Beginner's GuideRating: 4.5 out of 5 stars4.5/5 (23)
- Azure DevOps Engineer: Exam AZ-400: Azure DevOps Engineer: Exam AZ-400 Designing and Implementing Microsoft DevOps SolutionsFrom EverandAzure DevOps Engineer: Exam AZ-400: Azure DevOps Engineer: Exam AZ-400 Designing and Implementing Microsoft DevOps SolutionsNo ratings yet
- Linux: The Ultimate Beginner's Guide to Learn Linux Operating System, Command Line and Linux Programming Step by StepFrom EverandLinux: The Ultimate Beginner's Guide to Learn Linux Operating System, Command Line and Linux Programming Step by StepRating: 4.5 out of 5 stars4.5/5 (9)
- Apple Card and Apple Pay: A Ridiculously Simple Guide to Mobile PaymentsFrom EverandApple Card and Apple Pay: A Ridiculously Simple Guide to Mobile PaymentsNo ratings yet
- Kali Linux - An Ethical Hacker's Cookbook - Second Edition: Practical recipes that combine strategies, attacks, and tools for advanced penetration testing, 2nd EditionFrom EverandKali Linux - An Ethical Hacker's Cookbook - Second Edition: Practical recipes that combine strategies, attacks, and tools for advanced penetration testing, 2nd EditionRating: 5 out of 5 stars5/5 (1)
- Powershell: The ultimate beginner's guide to Powershell, making you a master at Windows Powershell command line fast!From EverandPowershell: The ultimate beginner's guide to Powershell, making you a master at Windows Powershell command line fast!Rating: 5 out of 5 stars5/5 (1)
- Mastering Linux Security and Hardening - Second Edition: Protect your Linux systems from intruders, malware attacks, and other cyber threats, 2nd EditionFrom EverandMastering Linux Security and Hardening - Second Edition: Protect your Linux systems from intruders, malware attacks, and other cyber threats, 2nd EditionNo ratings yet
- Mastering Swift 5 - Fifth Edition: Deep dive into the latest edition of the Swift programming language, 5th EditionFrom EverandMastering Swift 5 - Fifth Edition: Deep dive into the latest edition of the Swift programming language, 5th EditionNo ratings yet
- AWS: The Complete Beginner to Advanced Guide for Amazon Web Service — The Ultimate TutorialFrom EverandAWS: The Complete Beginner to Advanced Guide for Amazon Web Service — The Ultimate TutorialRating: 5 out of 5 stars5/5 (4)
- Hackers & Painters: Big Ideas from the Computer AgeFrom EverandHackers & Painters: Big Ideas from the Computer AgeRating: 4.5 out of 5 stars4.5/5 (5)
- XDA Developers' Android Hacker's Toolkit: The Complete Guide to Rooting, ROMs and ThemingFrom EverandXDA Developers' Android Hacker's Toolkit: The Complete Guide to Rooting, ROMs and ThemingRating: 2 out of 5 stars2/5 (2)
- Active Directory: Network Management Best Practices For System AdministratorsFrom EverandActive Directory: Network Management Best Practices For System AdministratorsNo ratings yet