You might also like
- Electronique Et Loisirs 20 - Inconnu (E)Document96 pagesElectronique Et Loisirs 20 - Inconnu (E)franomar1996100% (1)
- Cours-Module APDocument27 pagesCours-Module APBoualem MokhtariaNo ratings yet
- NizarCHELLYCRATT2015 PDFDocument7 pagesNizarCHELLYCRATT2015 PDFgaetantaffoNo ratings yet
- Comparatif Variateurs Électroniques 1987 - Auto8 - Déc87 - 29Document4 pagesComparatif Variateurs Électroniques 1987 - Auto8 - Déc87 - 29vintagerccarNo ratings yet
- SaddaouiRafik PDFDocument175 pagesSaddaouiRafik PDFKhalil HsaineNo ratings yet
- Tesla Models Can Due User ManualDocument27 pagesTesla Models Can Due User Manualdaha5395No ratings yet
- CahierdeschargesDocument20 pagesCahierdeschargesyann canutNo ratings yet
- Préparation Moteurs Électriques - Auto8 - Mars88 - 32Document5 pagesPréparation Moteurs Électriques - Auto8 - Mars88 - 32vintagerccarNo ratings yet
- SIN - 1 - 5 - TD Mesure SignalDocument4 pagesSIN - 1 - 5 - TD Mesure SignalRamziNo ratings yet
- Bus DallasDocument3 pagesBus DallasAdnen GuedriaNo ratings yet
- DE NOUVEAUX MODULES HO. #9. Commandes D'aiguillages Par Tirettes. Par Hervé LeclèreDocument4 pagesDE NOUVEAUX MODULES HO. #9. Commandes D'aiguillages Par Tirettes. Par Hervé LeclèrePhilippe VepierreNo ratings yet
- Rapport de StageDocument36 pagesRapport de StageDjiolioNo ratings yet
- Le Robot ZumoDocument4 pagesLe Robot ZumoFaress MannNo ratings yet
- Chapitre 3Document15 pagesChapitre 3ben amor ben amorNo ratings yet
- tp5 MotorDocument2 pagestp5 Motorisl dzNo ratings yet
- FRITZING1 Construire Une MaquetteDocument8 pagesFRITZING1 Construire Une MaquetteOumarToureNo ratings yet
- ArduinoSimuminkMAtlab PDFDocument32 pagesArduinoSimuminkMAtlab PDFAli BabaNo ratings yet
- Arduino Premiers Pas en Informatique Embarquee PDFDocument631 pagesArduino Premiers Pas en Informatique Embarquee PDFAhmed BidArNo ratings yet
- Numero115fr PDFDocument54 pagesNumero115fr PDFmorpheus_is_backNo ratings yet
- Lo11 TP 2015Document94 pagesLo11 TP 2015TheLastArchivistNo ratings yet
- Cours 9 - Bus SPIDocument4 pagesCours 9 - Bus SPIKhalil HsaineNo ratings yet
- Rapport de Stage Badin Baptiste PDFDocument45 pagesRapport de Stage Badin Baptiste PDFLA PLACANo ratings yet
- Real Time ClockDocument32 pagesReal Time ClockAbhinav Kant VatsyayanNo ratings yet
- ING ELN Ghorzi+mimouni PDFDocument110 pagesING ELN Ghorzi+mimouni PDFجمال طيبيNo ratings yet
- ST Arduino FR FFTSpectrumDocument4 pagesST Arduino FR FFTSpectrumkhayyamNo ratings yet
- Presentation PpeDocument25 pagesPresentation PpepayneeeNo ratings yet
- TD2 RaspberryDocument3 pagesTD2 RaspberryOussema GharssallahNo ratings yet
- Lelangagearduino PDFDocument17 pagesLelangagearduino PDFAdil AbouelhassanNo ratings yet
- Gestion d’ Une Matrice Des LED Avec ArduinoDocument20 pagesGestion d’ Une Matrice Des LED Avec ArduinoHuawei SergeNo ratings yet
- Presentation SETI Rentree 2016Document43 pagesPresentation SETI Rentree 2016Phạm Hoàng AnhNo ratings yet
- Electronique Pratique 2006-09Document61 pagesElectronique Pratique 2006-09batka20% (1)
- SHBCHSDBDocument22 pagesSHBCHSDBMohamed ToujgaNo ratings yet
- Poly s4s5 ArduinoDocument22 pagesPoly s4s5 ArduinosmartmathNo ratings yet
- PI ChiroDocument11 pagesPI ChiroGuillaume RischNo ratings yet
- g08 FABRE Projet RFID LEBORGNE NDIAYE PDFDocument25 pagesg08 FABRE Projet RFID LEBORGNE NDIAYE PDFayman akhouadNo ratings yet
- Contrôle de Servomoteur Avec Un ArduinoDocument2 pagesContrôle de Servomoteur Avec Un ArduinoSas KiNo ratings yet
- Ardx Eg Spar FR WebDocument40 pagesArdx Eg Spar FR Webbeldjehem mohamedNo ratings yet
- Cours Arduino Progra PDFDocument24 pagesCours Arduino Progra PDFFrancklin TokimitondrasoaNo ratings yet
- Formation Arduino 1 - MicrocontrôlesDocument31 pagesFormation Arduino 1 - MicrocontrôlesTAHRI khalidNo ratings yet
- Configuration GRBLDocument7 pagesConfiguration GRBLHajar MobhidNo ratings yet
- Untitled PDFDocument54 pagesUntitled PDFSalim Adamou BouzouNo ratings yet
- Formation Arduino VDocument2 pagesFormation Arduino VnizarNo ratings yet
- Afficheur DynamiqueDocument12 pagesAfficheur DynamiqueKhalil HsaineNo ratings yet
- Projets Matlab & Microcontrôleur #8 - Machine de Tri Automatique Par CouleursDocument68 pagesProjets Matlab & Microcontrôleur #8 - Machine de Tri Automatique Par CouleursYoussef AkarneNo ratings yet
- Boutarfa Ahmed Akram ConvertiDocument56 pagesBoutarfa Ahmed Akram Convertiwardy wassefNo ratings yet
- Campus IntélligentDocument17 pagesCampus IntélligentLina SAIDNo ratings yet
- Revista Electronique Et Loisirs - 013 PDFDocument96 pagesRevista Electronique Et Loisirs - 013 PDFJhon Garay100% (1)
- Comment Fabriquer Un DAC 24bits - 192khz Avec Un Raspberry Pi - Hifi LabDocument20 pagesComment Fabriquer Un DAC 24bits - 192khz Avec Un Raspberry Pi - Hifi LabGoldjediNo ratings yet
- ArduinoDocument10 pagesArduinoUani KacoNo ratings yet
- Présentation Pfa FinaleDocument39 pagesPrésentation Pfa FinaleMohamed El HajjamNo ratings yet
- Electronique Pratique 323 Janvier 2008Document68 pagesElectronique Pratique 323 Janvier 2008AliproNo ratings yet
- 3396 7 Appinv Arduino Commande Par Sms Avec ReponseDocument7 pages3396 7 Appinv Arduino Commande Par Sms Avec ReponseAdel DataNo ratings yet
- Avions HS 38 PreviewDocument10 pagesAvions HS 38 PreviewDeBrialmontNo ratings yet
- Telecharger Gratuit CoursExercices - Com Arduino BalanceDFRobotSENO160.PDF 309Document3 pagesTelecharger Gratuit CoursExercices - Com Arduino BalanceDFRobotSENO160.PDF 309Jawher SalemNo ratings yet
- Kuman 3.5 Pouce LCD TFT Screen Écran Avec Entrée Carte SD Pour Arduino UNO R3 Mega2560 Board ModuleDocument7 pagesKuman 3.5 Pouce LCD TFT Screen Écran Avec Entrée Carte SD Pour Arduino UNO R3 Mega2560 Board ModulebeosroNo ratings yet
- FR 011216 151011 ME FGSQHQ PDFDocument12 pagesFR 011216 151011 ME FGSQHQ PDFAbderrahmane WardiNo ratings yet
- Vue D'ensemble: Presentation de La Carte Arduino UnoDocument5 pagesVue D'ensemble: Presentation de La Carte Arduino UnobouchraNo ratings yet
- Sujet DefiniDocument15 pagesSujet DefiniSynthia KapengaNo ratings yet
- Robot Suiveur Delingne ConcepDocument18 pagesRobot Suiveur Delingne ConcepAchraf AlaouiNo ratings yet
- d18 4Document41 pagesd18 4Abdallah BelcaidNo ratings yet
- T08 - La Guerre de Cent Ans, Bertrand Du GuesclinDocument50 pagesT08 - La Guerre de Cent Ans, Bertrand Du Guesclinasturkong100% (2)
- T03 - Charlemagne, Les Vikings PDFDocument50 pagesT03 - Charlemagne, Les Vikings PDFasturkongNo ratings yet
- 01 - Tintin Au Pays Des Soviets PDFDocument66 pages01 - Tintin Au Pays Des Soviets PDFFelipe Lipe Steiner100% (1)
- Avions RCDocument20 pagesAvions RCAyoub Mountalek100% (1)
- Bou 7002Document156 pagesBou 7002Oussama DjabNo ratings yet
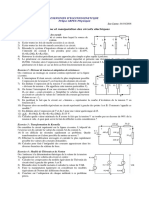
- EXERCICES DELECTROCINETIQUE Prepa CAPESDocument14 pagesEXERCICES DELECTROCINETIQUE Prepa CAPESOussama Dikouk100% (2)
- Dimensionnement Des GEDocument25 pagesDimensionnement Des GENasredine AlainNo ratings yet
- Rapport Final OkDocument45 pagesRapport Final OkKiyugami RinozanNo ratings yet
- Conversion kVA en Ampère - Comment FaireDocument17 pagesConversion kVA en Ampère - Comment FairekarijosephNo ratings yet
- Ca 120 FR 1304 PDFDocument20 pagesCa 120 FR 1304 PDFLuka MadridNo ratings yet
- CT 4 Codes AnsiaDocument11 pagesCT 4 Codes AnsiaTaoufik SadeqNo ratings yet
- Le PhotovoltaiqueDocument16 pagesLe Photovoltaique3ou9 shakspirNo ratings yet
- Mémoire Master ISOLATEURSDocument64 pagesMémoire Master ISOLATEURSHichèm BerjèbNo ratings yet
- Memoire Pfe Mekhloufi - Final-ConvertiDocument65 pagesMemoire Pfe Mekhloufi - Final-ConvertiKientegaNo ratings yet
- Fiche Technique sd1 ImoDocument5 pagesFiche Technique sd1 ImoDimitri Kawasaki for everNo ratings yet
- Wahid DerouicheDocument27 pagesWahid DerouicheNâs RôNo ratings yet
- Fiche de Renseignements Pour Le Raccordement en Energie Electrique D'Un Nouveau Client Haute TensionDocument6 pagesFiche de Renseignements Pour Le Raccordement en Energie Electrique D'Un Nouveau Client Haute Tensionimad chemliNo ratings yet
- Debut Memoire .Amlpi.Document92 pagesDebut Memoire .Amlpi.Christ ElangNo ratings yet
- TP1 - Etude de Machine À Courant Continu:: La Plaque Signalétique Du MoteurDocument8 pagesTP1 - Etude de Machine À Courant Continu:: La Plaque Signalétique Du MoteurEL HAFIANI MOUADNo ratings yet
- Guide SBPA PDFDocument30 pagesGuide SBPA PDFAmina BenNo ratings yet
- DME 4x5 Vol2 Composition FR Vers - ADocument6 pagesDME 4x5 Vol2 Composition FR Vers - Aphilrich123No ratings yet
- Choix Du Régulateur Et de L'onduleurDocument18 pagesChoix Du Régulateur Et de L'onduleurTOPASONo ratings yet
- SSP 287 Audi A8 03 Composants ÉlectriquesDocument96 pagesSSP 287 Audi A8 03 Composants ÉlectriquesJean-Marc CiccarelliNo ratings yet
- Info - Iec61558 2 5 (Ed2.0) BDocument12 pagesInfo - Iec61558 2 5 (Ed2.0) BShahed HussainNo ratings yet
- Datasheet Quattro 3kVA 15kVA FRDocument2 pagesDatasheet Quattro 3kVA 15kVA FRSINES FranceNo ratings yet
- ESE03 ProgrammeDocument1 pageESE03 ProgrammeAbdenourNo ratings yet
- JJL El Etk 00748Document9 pagesJJL El Etk 00748ATTAR ENTRELECNo ratings yet
- Machines A Etats VHDLDocument12 pagesMachines A Etats VHDLchichan1leo1ibn1adamNo ratings yet
- TP Ing1 Machines TournatesDocument48 pagesTP Ing1 Machines Tournatespierre vojnovicNo ratings yet
- Les Différences de Potentiels (DDP)Document2 pagesLes Différences de Potentiels (DDP)Boudjema SoudedNo ratings yet
- TD1Exercice Hacheur Série Electronique de Puissance AvancéeDocument3 pagesTD1Exercice Hacheur Série Electronique de Puissance AvancéeblbmalekNo ratings yet
- Analyse Des Circuits A Courant Continu Vol 2Document2 pagesAnalyse Des Circuits A Courant Continu Vol 2Mohamed SakhiNo ratings yet
- Exos12 FiltrageDocument5 pagesExos12 FiltrageLucas Rogier50% (2)