You might also like
- 03 NCERT PHYSICS POINTS TO PONDER Class-XIDocument10 pages03 NCERT PHYSICS POINTS TO PONDER Class-XIvipin79% (14)
- Problems in A-Level PhysicsDocument201 pagesProblems in A-Level Physicsweews97% (36)
- Theory of MachinesDocument69 pagesTheory of MachinesAnil Lodwal100% (1)
- Autodyn Theory ManualDocument235 pagesAutodyn Theory ManualAndre OliveiraNo ratings yet
- Friction & Moment of Inertia-Engineering Mechanics-IIT-KanpurDocument51 pagesFriction & Moment of Inertia-Engineering Mechanics-IIT-KanpurNitin SharmaNo ratings yet
- Calculus Basic Concepts For High Schools Tarasov 1988 XelatexDocument247 pagesCalculus Basic Concepts For High Schools Tarasov 1988 XelatexFabiana SinghNo ratings yet
- Finite Element Analysis of Composite Laminates 0792311256Document111 pagesFinite Element Analysis of Composite Laminates 0792311256ravindrababug100% (3)
- Modeling A Bungee JumpDocument9 pagesModeling A Bungee JumpHermes Pantoja CarhuavilcaNo ratings yet
- ANSYS Forte Theory Manual 18.2Document76 pagesANSYS Forte Theory Manual 18.2Panda Hero50% (2)
- Power, Momentum and Collisions - Physics for Kids - 5th Grade | Children's Physics BooksFrom EverandPower, Momentum and Collisions - Physics for Kids - 5th Grade | Children's Physics BooksNo ratings yet
- Physical Science Week 10 Module 3Document6 pagesPhysical Science Week 10 Module 3RODJHEN ANNE P. BARQUILLA0% (1)
- Lecture 10 Method of Virtual WorkDocument11 pagesLecture 10 Method of Virtual WorkAnonymous yorzHjDBdNo ratings yet
- Answer Key - HydraugeoDocument5 pagesAnswer Key - HydraugeoBryan YuNo ratings yet
- E104 - AgustinDocument19 pagesE104 - AgustinSeth Jarl G. AgustinNo ratings yet
- Physics Key FormulasDocument4 pagesPhysics Key FormulasChidi BenedictNo ratings yet
- Chapter 5 StaticDocument22 pagesChapter 5 Staticnur aisyahNo ratings yet
- Study Package On Newtons Law of MotionDocument59 pagesStudy Package On Newtons Law of MotionApex Institute67% (3)
- Harvard Competency Dictionary CompleteDocument76 pagesHarvard Competency Dictionary Completeedrialde100% (3)
- Lecture 3 Equilibrium of Bodies IDocument14 pagesLecture 3 Equilibrium of Bodies IAnonymous yorzHjDBdNo ratings yet
- Equilibrium of Bodies I: and S Apply On ItDocument15 pagesEquilibrium of Bodies I: and S Apply On ItArijit SinghNo ratings yet
- Engineering Mechanics Lectures 1&2: Review Laws of Motion, Vector AlgebraDocument14 pagesEngineering Mechanics Lectures 1&2: Review Laws of Motion, Vector AlgebraSathiyaseelan SubramaniNo ratings yet
- Rotational Motion Engineering Mechanics IIT KanpurDocument67 pagesRotational Motion Engineering Mechanics IIT KanpurNitin SharmaNo ratings yet
- Rotational Dynamics I: Angular MomentumDocument14 pagesRotational Dynamics I: Angular Momentumrizal123No ratings yet
- Force and Motion - 1: 5.1. Newtons First LawDocument16 pagesForce and Motion - 1: 5.1. Newtons First Laweka123No ratings yet
- Review of The Three Laws of Motion and Vector AlgebraDocument19 pagesReview of The Three Laws of Motion and Vector AlgebraSumanta DasNo ratings yet
- Understanding Friction Forces in Various SituationsDocument18 pagesUnderstanding Friction Forces in Various SituationsDipak TaleleNo ratings yet
- Lecture 7 - Friction - NptelDocument18 pagesLecture 7 - Friction - Nptels_murugan02No ratings yet
- Lecture 15 & 16 Work and EnergyDocument12 pagesLecture 15 & 16 Work and Energyrizal123No ratings yet
- Unit IDocument10 pagesUnit ISri RNo ratings yet
- Physics1.docx 29Document7 pagesPhysics1.docx 29Farogh HamidNo ratings yet
- Engg MechanicsDocument284 pagesEngg Mechanicsmukesh_mlbNo ratings yet
- Froces Notes Dynamics+Deformation+MomentsDocument13 pagesFroces Notes Dynamics+Deformation+MomentsFaiq IrfanNo ratings yet
- 4 (New9th) 1Document6 pages4 (New9th) 1boltplayz2009No ratings yet
- Equilibrium of Bodies IIDocument13 pagesEquilibrium of Bodies IIrsatyameherNo ratings yet
- Work and EnergyDocument32 pagesWork and Energycreative dudeNo ratings yet
- NoessDocument7 pagesNoessarpita9619080670No ratings yet
- Rigid Body Dynamics III: Rotation and TranslationDocument11 pagesRigid Body Dynamics III: Rotation and Translationmann123No ratings yet
- Rotational Dynamics II: Rotation About A Fixed AxisDocument11 pagesRotational Dynamics II: Rotation About A Fixed Axisrizal123No ratings yet
- Physics Journal 3 - SpringsDocument16 pagesPhysics Journal 3 - SpringsLaras FebryantiNo ratings yet
- Module 2 DynamicsDocument47 pagesModule 2 DynamicsTaha Kafil-HussainNo ratings yet
- Bunday's MathematicsDocument30 pagesBunday's Mathematicsrubberduck999flexNo ratings yet
- Lecture 6 - Statics PDFDocument18 pagesLecture 6 - Statics PDFHabyarimana ProjecteNo ratings yet
- ForceDocument9 pagesForceMohammed AadilNo ratings yet
- Engg. MechanicsDocument29 pagesEngg. MechanicsSunand Pongurlekar100% (1)
- Laws of MotionDocument19 pagesLaws of MotionSubrata PaulNo ratings yet
- Introduction To MechanismsDocument7 pagesIntroduction To MechanismsAkash SoniNo ratings yet
- Mechanics Lecture Notes 1 Lecture 2: Statics - Equilibrium of A ParticleDocument3 pagesMechanics Lecture Notes 1 Lecture 2: Statics - Equilibrium of A ParticleIbrahim ShaaranyNo ratings yet
- Engineering Mechancis Manoj K Harbola-IIT Knapur .PDF Filename UTF-8''Engineering Mechancis (Manoj K Harbola-IIT Knapur)Document272 pagesEngineering Mechancis Manoj K Harbola-IIT Knapur .PDF Filename UTF-8''Engineering Mechancis (Manoj K Harbola-IIT Knapur)Abhinav MishraNo ratings yet
- Lecture 5 ADocument7 pagesLecture 5 ADheyaa Al-JubouriNo ratings yet
- Work, Energy and PowerDocument27 pagesWork, Energy and PowersuperultimateamazingNo ratings yet
- Mat Phy CH 1 To 5Document20 pagesMat Phy CH 1 To 5Kamran SaleemNo ratings yet
- Engineering Mechanics Prof. Manoj Harbola Indian Institute of Technology, Kanpur Module - 02 Lecture - 01 Plane Trusses - IDocument30 pagesEngineering Mechanics Prof. Manoj Harbola Indian Institute of Technology, Kanpur Module - 02 Lecture - 01 Plane Trusses - Ilechu-92No ratings yet
- EM LAB 1 (Group 4)Document5 pagesEM LAB 1 (Group 4)Syfull musicNo ratings yet
- Work, Power & EnergyDocument16 pagesWork, Power & EnergyAyush GamerNo ratings yet
- Laws of Motion MKDocument26 pagesLaws of Motion MKriddhiarunkarangaleNo ratings yet
- statics of rigid bodies (1)Document14 pagesstatics of rigid bodies (1)Mariya MariyaNo ratings yet
- 08 Work and EnergyDocument13 pages08 Work and Energyapi-27085921No ratings yet
- Work, Energy and PowerDocument11 pagesWork, Energy and PowerPristiadi UtomoNo ratings yet
- Virtual Work Method for Calculating Equilibrium ForcesDocument12 pagesVirtual Work Method for Calculating Equilibrium Forcesdkgupta28No ratings yet
- Seam 2 CombinedDocument41 pagesSeam 2 Combinedjanerniecabe11032002No ratings yet
- Engineering Mechanics: Statics and Concurrent ForcesDocument39 pagesEngineering Mechanics: Statics and Concurrent ForcesSamaroha NandiNo ratings yet
- 3.work and Kinetic EnergyDocument8 pages3.work and Kinetic EnergyDowlet JumayewNo ratings yet
- Mechanics Lab1Document7 pagesMechanics Lab1yogendra kumarNo ratings yet
- Unit-1 FMEDocument59 pagesUnit-1 FMEAshish KhariNo ratings yet
- Problems Chap 4Document36 pagesProblems Chap 4Veltro da CorvaiaNo ratings yet
- Physics of BridgesDocument64 pagesPhysics of Bridgesthe-spirit50% (2)
- Red PowerPoint Title Set by Presentation Process.Document1 pageRed PowerPoint Title Set by Presentation Process.subhasisberaNo ratings yet
- 1 Red PowerPoint Title SetDocument1 page1 Red PowerPoint Title SetNitin SharmaNo ratings yet
- Photoelectric Effect AppDocument9 pagesPhotoelectric Effect AppNitin SharmaNo ratings yet
- Geometric ProbabilityDocument60 pagesGeometric ProbabilitythariqsatriaNo ratings yet
- Product Rationalization and Categorization Update Jhn01l04Document17 pagesProduct Rationalization and Categorization Update Jhn01l04shyam.india3803No ratings yet
- Multinomial TheoremDocument2 pagesMultinomial TheoremNitin SharmaNo ratings yet
- Modern PDFDocument15 pagesModern PDFNitin Sharma100% (1)
- Equilibrium of Bodies Engineering Mechanics IIT KanpurDocument39 pagesEquilibrium of Bodies Engineering Mechanics IIT KanpurNitin SharmaNo ratings yet
- Physics MechanicsDocument44 pagesPhysics MechanicsAnkit SwainNo ratings yet
- Phy 2049 Fall 2000 Exam 1 (Makeup) : Answer: 2Πρkr/3Document7 pagesPhy 2049 Fall 2000 Exam 1 (Makeup) : Answer: 2Πρkr/3hurricoasterNo ratings yet
- IIT JEE All India Mock Test Series Test 5Document15 pagesIIT JEE All India Mock Test Series Test 5Gopal PenjarlaNo ratings yet
- IIT JEE Main Advanced Physical Chemistry 12th Chemical Kinetics PDFDocument44 pagesIIT JEE Main Advanced Physical Chemistry 12th Chemical Kinetics PDFSesha Sai Kumar50% (4)
- SK390 PreviewDocument36 pagesSK390 PreviewkethavarapuramjiNo ratings yet
- Indian National Physics Olympiad - 2008Document5 pagesIndian National Physics Olympiad - 2008Vatsal AggarwalNo ratings yet
- Mutual FundDocument5 pagesMutual FundNitin SharmaNo ratings yet
- Symmetry in MathDocument4 pagesSymmetry in MathSarvesh DubeyNo ratings yet
- Nuclear Physics-Critical Thinking SkillsDocument36 pagesNuclear Physics-Critical Thinking SkillsNitin SharmaNo ratings yet
- Solutions IIT JEE All India Test Series Test 5Document5 pagesSolutions IIT JEE All India Test Series Test 5Nitin SharmaNo ratings yet
- Atomic Structure-Objective QuestionsDocument20 pagesAtomic Structure-Objective QuestionsNitin SharmaNo ratings yet
- Physics Olympiad QuestionDocument11 pagesPhysics Olympiad QuestionIrtiza HaSanNo ratings yet
- Dimensional Analysis in MathDocument7 pagesDimensional Analysis in Mathbulu30No ratings yet
- The Photoelectric Effect: Summary From Last TimeDocument6 pagesThe Photoelectric Effect: Summary From Last TimeNitin SharmaNo ratings yet
- Essential Kinematics Problems GuideDocument25 pagesEssential Kinematics Problems GuideLakshyaNo ratings yet
- Simple Pemdulum - 5Document1 pageSimple Pemdulum - 5Sumihar SimangunsongNo ratings yet
- Cathode Rays & X-RaysDocument7 pagesCathode Rays & X-Rayssanits591No ratings yet
- Halogen and Noble GasesDocument33 pagesHalogen and Noble GasesYen ZaneNo ratings yet
- Chemistry - Halogen and Noble GasesDocument4 pagesChemistry - Halogen and Noble GasesNitin SharmaNo ratings yet
- Mid 6 2017 QuestionsDocument7 pagesMid 6 2017 QuestionsLong Nguyễn ThànhNo ratings yet
- Philips Affiniti 50 Ultrasound SystemDocument32 pagesPhilips Affiniti 50 Ultrasound SystemTuyen nguyen ngocNo ratings yet
- Adding Two Vectors Nonperpendicular PDFDocument11 pagesAdding Two Vectors Nonperpendicular PDFMary Ann DimacaliNo ratings yet
- Fields and Moments of a Moving Electric DipoleDocument14 pagesFields and Moments of a Moving Electric DipoleKapila WijayaratneNo ratings yet
- E4G Project 2Document30 pagesE4G Project 2daniel dusNo ratings yet
- Lecture 3Document13 pagesLecture 3JulianAndresGuessIronNo ratings yet
- SKF Bearings in Centrifugal PumpsDocument38 pagesSKF Bearings in Centrifugal PumpsEric21No ratings yet
- Structural Stability SystemsDocument4 pagesStructural Stability Systemsmohamedyahai100% (1)
- Shear Force and Bending Moment Diagrams ExplainedDocument16 pagesShear Force and Bending Moment Diagrams ExplainedHimalFernandoNo ratings yet
- Fluid - Mechanics 04bDocument54 pagesFluid - Mechanics 04bjavi checaNo ratings yet
- Dispersion Relation and Cutoff Frequency For A SlinkyDocument7 pagesDispersion Relation and Cutoff Frequency For A Slinkycheatham6191No ratings yet
- Tsiolkovsky Rocket Equation - Wikipedia, The Free EncyclopediaDocument8 pagesTsiolkovsky Rocket Equation - Wikipedia, The Free Encyclopediamechmaster4uNo ratings yet
- Analytical and Numerical Investigation of Knee BraceDocument15 pagesAnalytical and Numerical Investigation of Knee BraceAli MohamedNo ratings yet
- EBVF4103 (Chapter 2) Fluid Mechanics For Civil EngineeringDocument44 pagesEBVF4103 (Chapter 2) Fluid Mechanics For Civil Engineeringpsycin0% (1)
- Appendix 3 Basis For Establishing External Pressure ChartsDocument3 pagesAppendix 3 Basis For Establishing External Pressure ChartsJhon HernandezNo ratings yet
- STAAD Report - Beam Design-1Document11 pagesSTAAD Report - Beam Design-1prabhuNo ratings yet
- BASE PLATE DESIGN CALCULATIONSDocument10 pagesBASE PLATE DESIGN CALCULATIONSPradip NikamNo ratings yet
- 2 Stresses in Pavements Solved Examples With Charts of FlexibleDocument17 pages2 Stresses in Pavements Solved Examples With Charts of FlexibleNahom Esh100% (1)
- Heat Transfer-HTDocument2 pagesHeat Transfer-HTSuthari AmbikaNo ratings yet
- MODULE 4 Hydraulics RevisedDocument30 pagesMODULE 4 Hydraulics Revised21-08856No ratings yet
- Exercices MécaniqueDocument23 pagesExercices MécaniqueTom ThibertNo ratings yet
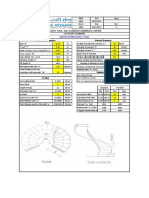
- Helicoidal StairDocument5 pagesHelicoidal Stairdeepak tom babuNo ratings yet