You might also like
- Espectro de RespuestaDocument26 pagesEspectro de RespuestaJuan Cuadros BenitesNo ratings yet
- Espectros de respuesta dinámicaDocument25 pagesEspectros de respuesta dinámicakarensuana100% (2)
- Ingeniería Sismorresistente EspectrosDocument22 pagesIngeniería Sismorresistente EspectrosHildebrando Ventura JorgeNo ratings yet
- Espectros de Respuesta y de DiseñoDocument22 pagesEspectros de Respuesta y de DiseñoDaniel CristanchoNo ratings yet
- Tahis 9 y 10Document4 pagesTahis 9 y 10ricardoNo ratings yet
- Espectros de Diseño y de RespuestaDocument12 pagesEspectros de Diseño y de RespuestaAlvaro Pazmiño RomanNo ratings yet
- Ing AntisismicaDocument28 pagesIng AntisismicaFrank Call CalviNo ratings yet
- Ing AntisismicaDocument11 pagesIng AntisismicaYuli Ninaja RamosNo ratings yet
- Diseño de columnas usando espectro sísmicoDocument8 pagesDiseño de columnas usando espectro sísmicoMarfetoNo ratings yet
- Espectros LinealesDocument24 pagesEspectros LinealesMark RocaNo ratings yet
- Que Es Un Espectro de Respuesta SísmicaDocument8 pagesQue Es Un Espectro de Respuesta SísmicaJavier Morataya0% (1)
- Espectro de RespuestaDocument8 pagesEspectro de Respuestacarter moralesNo ratings yet
- Tarea Academica #1Document18 pagesTarea Academica #1Katy MuñozNo ratings yet
- C8. - Espectros ElasticosDocument15 pagesC8. - Espectros ElasticosvictorNo ratings yet
- Ejemplo DuhamelDocument30 pagesEjemplo DuhamelRuben Loaiza LopezNo ratings yet
- EspectrosDocument33 pagesEspectrosMarco Del Castillo AlarconNo ratings yet
- Espectros de RespuestaDocument18 pagesEspectros de RespuestaYuriStiferNo ratings yet
- Análisis de registros sísmicos chilenos y periodo predominante del sitioDocument10 pagesAnálisis de registros sísmicos chilenos y periodo predominante del sitioAlberto FuentesNo ratings yet
- Tipos de EspectrosDocument13 pagesTipos de EspectrosYerisito0% (1)
- Expo Sismos Matriz ModalDocument16 pagesExpo Sismos Matriz ModalJessica Martinez100% (1)
- ResonanciaDocument13 pagesResonanciaCheeko P.No ratings yet
- Degtra y EdushakeDocument33 pagesDegtra y EdushakeMariella Stefany100% (1)
- Espectros de respuesta elástica: definición y cálculoDocument3 pagesEspectros de respuesta elástica: definición y cálculoXavier ZavalaNo ratings yet
- Espectro de Una Señal SismicaDocument12 pagesEspectro de Una Señal SismicaCristian Midward LupacaNo ratings yet
- Vibraciones Mecanicas ModificadoDocument48 pagesVibraciones Mecanicas ModificadoMiguel AngelNo ratings yet
- Resonancia Sísmica AlexDocument6 pagesResonancia Sísmica AlexElvis RosarioNo ratings yet
- Tema - Espectros de Respuesta NormativoDocument14 pagesTema - Espectros de Respuesta Normativovladimir quito granadosNo ratings yet
- Potencial Destructivo de SismosDocument21 pagesPotencial Destructivo de SismosEdgar JimenezNo ratings yet
- Espectros de RespuestaDocument23 pagesEspectros de RespuestaMilca PalacinNo ratings yet
- Informe DinámicaDocument20 pagesInforme DinámicaWILMER JHONNY MARIN LINIANNo ratings yet
- Ecuaciones diferenciales y oscilaciones mecánicasDocument17 pagesEcuaciones diferenciales y oscilaciones mecánicasCRISTHIAN YUPANQUI REYSANCHEZNo ratings yet
- Tarea - Foro No. 2Document1 pageTarea - Foro No. 2Vivian Lizeth Diaz ZegarraNo ratings yet
- Resonancia en PuentesDocument9 pagesResonancia en PuentesCesarS. HNo ratings yet
- La Resonancia MecánicaDocument12 pagesLa Resonancia MecánicaSamuelDavidToctoCabanillas100% (1)
- Articulo APLICACIÓN ANÁLISIS BÁSICO DEL MOVIMIENTO ARMÓNICO SIMPLE PARA DIMENSIONAR UNA COLUMNADocument9 pagesArticulo APLICACIÓN ANÁLISIS BÁSICO DEL MOVIMIENTO ARMÓNICO SIMPLE PARA DIMENSIONAR UNA COLUMNAALEXlol95No ratings yet
- Espectro de DiseñoDocument50 pagesEspectro de DiseñoMaholy OrtegaNo ratings yet
- Resumen Unidad 2 Geofisica AplicadaDocument10 pagesResumen Unidad 2 Geofisica AplicadaJavier RiveraNo ratings yet
- Tarea #02 - Ingenieria Sismica.Document21 pagesTarea #02 - Ingenieria Sismica.JOSUE RIVERA AGUIRRENo ratings yet
- Artículo - Trabajo Final - 2PDocument11 pagesArtículo - Trabajo Final - 2PJames ManobandaNo ratings yet
- 3 (1) - Clase 2 DinamicaDocument112 pages3 (1) - Clase 2 DinamicaJuan Carlos Caracas ValladaresNo ratings yet
- Vibraciones forzadas en sistemas amortiguadosDocument31 pagesVibraciones forzadas en sistemas amortiguadoshuachesNo ratings yet
- Edwin Espino 2019110143 Trabajo1Document22 pagesEdwin Espino 2019110143 Trabajo1Edwin EspinoNo ratings yet
- Intensidad de AriasDocument2 pagesIntensidad de AriasPrisscy ChimarroNo ratings yet
- Actividad Individual2 - Tema1.1Oscilaciones.Document21 pagesActividad Individual2 - Tema1.1Oscilaciones.Diana margarita Hernández SánchezNo ratings yet
- Menú Principal: Estructuras Sismoresistentes. Analisis Modal Espectral. Capítulo 2Document11 pagesMenú Principal: Estructuras Sismoresistentes. Analisis Modal Espectral. Capítulo 2Rildo Kenyi Apaza TitoNo ratings yet
- Resonancia en PuentesDocument9 pagesResonancia en PuentesmaaldemNo ratings yet
- Cuestionario Ing. SísmicaDocument10 pagesCuestionario Ing. SísmicaSandro SaldañaNo ratings yet
- Oscilaciones y M.A.S.Document7 pagesOscilaciones y M.A.S.Alessandro ValenciaNo ratings yet
- Espectro de Respuesta Lineal (Investigacion)Document12 pagesEspectro de Respuesta Lineal (Investigacion)Jose PattiNo ratings yet
- Libro de VallecillaDocument9 pagesLibro de VallecilladavidoortizsNo ratings yet
- On DasDocument20 pagesOn DasJohn Jairo ZambranoNo ratings yet
- TEMA 4 - 4 Espectros Sísmicos - OkDocument19 pagesTEMA 4 - 4 Espectros Sísmicos - Oklizandro gonzalez cisnerosNo ratings yet
- Guía para el análisis y solución de problemas de resistencia de materialesFrom EverandGuía para el análisis y solución de problemas de resistencia de materialesNo ratings yet
- Diseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaFrom EverandDiseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaNo ratings yet
- Metodología de proyecto sismorresistente de edificiosFrom EverandMetodología de proyecto sismorresistente de edificiosRating: 5 out of 5 stars5/5 (1)
- Virgen Del CarmenDocument1 pageVirgen Del CarmenEly Muñoz MarrufoNo ratings yet
- Puesto de SaludDocument1 pagePuesto de SaludEly Muñoz MarrufoNo ratings yet
- PROGRAMACIÓN (1) .DocxfffffDocument11 pagesPROGRAMACIÓN (1) .DocxfffffEly Muñoz MarrufoNo ratings yet
- Análisis Estructural II para EnviarDocument2 pagesAnálisis Estructural II para EnviarEly Muñoz MarrufoNo ratings yet
- Combinada ConectadaDocument26 pagesCombinada ConectadaEly Muñoz MarrufoNo ratings yet
- Horarios Civil FinalDocument1 pageHorarios Civil FinalEly Muñoz MarrufoNo ratings yet
- Horarios Civil Final PDFDocument2 pagesHorarios Civil Final PDFEly Muñoz MarrufoNo ratings yet
- Puente SDocument14 pagesPuente SEly Muñoz MarrufoNo ratings yet
- PlantaDocument1 pagePlantaEly Muñoz MarrufoNo ratings yet
- Planos Puente 1-P3ADocument1 pagePlanos Puente 1-P3AEly Muñoz MarrufoNo ratings yet
- Imprimir InformeDocument10 pagesImprimir InformeEly Muñoz MarrufoNo ratings yet
- ElíDocument4 pagesElíEly Muñoz MarrufoNo ratings yet
- 1° Clase EIA Ing. Civil Problem Amb. Calidad Amb, Natur Atrib.Document28 pages1° Clase EIA Ing. Civil Problem Amb. Calidad Amb, Natur Atrib.NEISERNo ratings yet
- InformeDocument1 pageInformeEly Muñoz MarrufoNo ratings yet
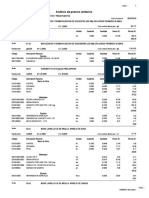
- Analisis de Costos UnitariosDocument4 pagesAnalisis de Costos UnitariosEly Muñoz MarrufoNo ratings yet
- Origen y Causa de Los SismosDocument4 pagesOrigen y Causa de Los SismosEly Muñoz MarrufoNo ratings yet
- IvanDocument19 pagesIvanEly Muñoz MarrufoNo ratings yet
- Mantenimiento vehículos UNACHDocument71 pagesMantenimiento vehículos UNACHEly Muñoz MarrufoNo ratings yet
- Análisis y Soluciones Al Deslizamiento de Tierras de La Comunidad de Vilcasit Distrito TacabambaDocument3 pagesAnálisis y Soluciones Al Deslizamiento de Tierras de La Comunidad de Vilcasit Distrito TacabambaEly Muñoz MarrufoNo ratings yet
- Impri Mir WilderDocument2 pagesImpri Mir WilderEly Muñoz MarrufoNo ratings yet
- Horarios Civil Final PDFDocument2 pagesHorarios Civil Final PDFEly Muñoz MarrufoNo ratings yet
- Cartas 2018.docx 1Document97 pagesCartas 2018.docx 1Ely Muñoz MarrufoNo ratings yet
- ELEVACIONESDocument1 pageELEVACIONESEly Muñoz MarrufoNo ratings yet
- Exposicion 3 Componente SocialDocument21 pagesExposicion 3 Componente SocialEly Muñoz Marrufo100% (1)
- Combinada ConectadaDocument26 pagesCombinada ConectadaEly Muñoz MarrufoNo ratings yet
- Dimension EsDocument2 pagesDimension EsEly Muñoz MarrufoNo ratings yet
- Evaluación de Lascaracteristicas Del Subsuelo para Ver Los DeslizamientosDocument1 pageEvaluación de Lascaracteristicas Del Subsuelo para Ver Los DeslizamientosEly Muñoz MarrufoNo ratings yet
- R.A. 114 y 115 Elmer Porfirio Con Sus Dos Memos y Dos NotificacionesaDocument6 pagesR.A. 114 y 115 Elmer Porfirio Con Sus Dos Memos y Dos NotificacionesaEly Muñoz MarrufoNo ratings yet
- Acuerdo de Consejo #08 - 2017-MdtDocument10 pagesAcuerdo de Consejo #08 - 2017-MdtEly Muñoz MarrufoNo ratings yet
- SEMINARIO DE GRADUACION Al Fin TerminadoDocument20 pagesSEMINARIO DE GRADUACION Al Fin TerminadoEswin GonzalezNo ratings yet
- 7 Arte Griego Arquitectura GriegaDocument29 pages7 Arte Griego Arquitectura GriegaCarlos ChuquiejNo ratings yet
- CDR-XVII: Discurso de orden del decano Walter Cornejo Báez en el primer trimestre de 2019Document53 pagesCDR-XVII: Discurso de orden del decano Walter Cornejo Báez en el primer trimestre de 2019pieriniticaNo ratings yet
- Pliegos de Prescripciones Tecnicas y ParticularesDocument63 pagesPliegos de Prescripciones Tecnicas y Particularesvillegas9No ratings yet
- Cuestionario Sobre ArticulacionesDocument6 pagesCuestionario Sobre ArticulacionesBorisAndresEsparzaParralesNo ratings yet
- TESIS de GRADO - Pensamiento CreativoDocument183 pagesTESIS de GRADO - Pensamiento Creativooscar0% (1)
- Recursos Audiovisuales PDFDocument96 pagesRecursos Audiovisuales PDFAndreita LitardoNo ratings yet
- Actividad de Refuerzo 09 - Revisión Del IntentoDocument4 pagesActividad de Refuerzo 09 - Revisión Del IntentoJuan Carlos Restrepo Salcedo0% (1)
- Pruebas de SoftwareDocument22 pagesPruebas de SoftwareFélixGonzálezNo ratings yet
- Los Cinco Secretos de La InnovaciónDocument3 pagesLos Cinco Secretos de La InnovaciónAlex-is SanchezNo ratings yet
- Lengua y Literatura - FIGURAS LITERARIAS - UNED - PDFDocument2 pagesLengua y Literatura - FIGURAS LITERARIAS - UNED - PDFjuanitoNo ratings yet
- Edificios Coloniales de Antigua GuatemalaDocument11 pagesEdificios Coloniales de Antigua GuatemalaEstu ArdoNo ratings yet
- Frase básicas en francésDocument25 pagesFrase básicas en francésKendra MelodyNo ratings yet
- Higiene PosturalDocument14 pagesHigiene PosturalPaola LópezNo ratings yet
- Presidencia de Tiburcio Carias en HondurasDocument2 pagesPresidencia de Tiburcio Carias en HondurasGIANNELLA MARCHESA BAQUEDANO CASTILLONo ratings yet
- Modulo 2 1° I La MateriaDocument2 pagesModulo 2 1° I La MateriaRichard RojasNo ratings yet
- Libro. Neurona (Biopsicología)Document12 pagesLibro. Neurona (Biopsicología)Jess Lara McDermidNo ratings yet
- Danzas Folcloricas de GuatemalaDocument4 pagesDanzas Folcloricas de GuatemalaMariusz George HNo ratings yet
- Abc Grupos Armados en ColombiaDocument31 pagesAbc Grupos Armados en ColombiaLUIS EDWIN PATIÑO PIÑEROSNo ratings yet
- Checklist pruebas red soporte primer nivelDocument3 pagesChecklist pruebas red soporte primer nivelOmar AxityNo ratings yet
- Test Progresivo de RavenDocument6 pagesTest Progresivo de RavenPatricio MartínezNo ratings yet
- Diseñando Un Pae (Proyecto de Aplicacion Escolar)Document10 pagesDiseñando Un Pae (Proyecto de Aplicacion Escolar)Neto Villanuevaa83% (6)
- Derecho Municipal y Regional - Obra Teatral de Audiencia LaboralDocument3 pagesDerecho Municipal y Regional - Obra Teatral de Audiencia LaboralHendrick c.yNo ratings yet
- Solicito Recalculo y La Continua de La Bonificacion Especial Por Concepto de Preparacion de Clase Equivalente Al 35Document3 pagesSolicito Recalculo y La Continua de La Bonificacion Especial Por Concepto de Preparacion de Clase Equivalente Al 35Nelson Walter Chavez VasquezNo ratings yet
- Avance Del Plan de Emergencia 3Document16 pagesAvance Del Plan de Emergencia 3Ronaldo Chisthiano VelasquezNo ratings yet
- Guia - Aprendizaje - Level 9Document10 pagesGuia - Aprendizaje - Level 9Gloria Isabel Rodriguez RestrepoNo ratings yet
- Corrida PAPA FappaDocument15 pagesCorrida PAPA FappaSergio Luis Zavala QuinteroNo ratings yet
- Segundo ciclo primaria proyecto matemáticas Comunitat ValencianaDocument134 pagesSegundo ciclo primaria proyecto matemáticas Comunitat ValencianaMauro LitagoNo ratings yet
- Ookami Shoujo To Kuro Ouji 2: Únete A La Discusión..Document1 pageOokami Shoujo To Kuro Ouji 2: Únete A La Discusión..anotafumateNo ratings yet
- Proyecto Del Puente HidraulicoDocument7 pagesProyecto Del Puente HidraulicoCeciVasquezLlanos100% (5)