You might also like
- Hell On Earth Reloaded AdventureDocument16 pagesHell On Earth Reloaded AdventureKurt Garwood100% (1)
- How To Be Happy All The Time - NLP AnchorsDocument9 pagesHow To Be Happy All The Time - NLP Anchorsmramakrishna919No ratings yet
- Foam ControlDocument28 pagesFoam ControlJoselu Ordoñez Ramos100% (1)
- A2 Unit of WorkDocument18 pagesA2 Unit of Workapi-486612781No ratings yet
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"From EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Rating: 2.5 out of 5 stars2.5/5 (2)
- Newton Raphson MethodDocument4 pagesNewton Raphson MethodLn Amitav BiswasNo ratings yet
- Stuart Wilde: Csodák Pedig VannakDocument31 pagesStuart Wilde: Csodák Pedig VannakRita AsztalosNo ratings yet
- Project Proposal VTP 4Document35 pagesProject Proposal VTP 4api-245643527No ratings yet
- Chapter 1 - PolymersDocument94 pagesChapter 1 - Polymersa2hasijaNo ratings yet
- Non Probability SamplingDocument9 pagesNon Probability SamplingMary Grace Broqueza100% (1)
- MATLAB Optimization Toolbox: Version 4.0 (R2008a) 23-Jan-2008Document26 pagesMATLAB Optimization Toolbox: Version 4.0 (R2008a) 23-Jan-2008Silvia Amstalden AguilleraNo ratings yet
- Problem Set 6 TATATATADocument6 pagesProblem Set 6 TATATATADENMARK TABASANNo ratings yet
- Newton RapsonDocument6 pagesNewton RapsonManuel OrdoñezNo ratings yet
- ME128 Optimization Toolbox NotesDocument4 pagesME128 Optimization Toolbox NotesMohammad Reza MadadiNo ratings yet
- All All: %limpiamos Pantalla. %borra Todas Las Variables Del Espacio de TrabajoDocument4 pagesAll All: %limpiamos Pantalla. %borra Todas Las Variables Del Espacio de TrabajoValencia Luis ErnestoNo ratings yet
- Implementation in Matlab of Differential EvolutionDocument26 pagesImplementation in Matlab of Differential EvolutionJuan Alex Arequipa ChecaNo ratings yet
- Verilog Operators GuideDocument14 pagesVerilog Operators Guidesrikar_dattaNo ratings yet
- Appendix B MATLAB® PROGRAMS PDFDocument16 pagesAppendix B MATLAB® PROGRAMS PDFcassindromeNo ratings yet
- Lesson 5: Selection: Akos Ledeczi and Mike FitzpatrickDocument29 pagesLesson 5: Selection: Akos Ledeczi and Mike FitzpatrickKamleshNo ratings yet
- 'Digite El Valor de N: ': CLC R 0 N Input I 1:n R R+i - 2Document4 pages'Digite El Valor de N: ': CLC R 0 N Input I 1:n R R+i - 2Diego Gonzalo Guerra CondoriNo ratings yet
- MATLAB Optimization ToolboxDocument37 pagesMATLAB Optimization Toolboxkushkhanna06No ratings yet
- Function: 'Buffalo (I,:) BP - K (I) 'Document5 pagesFunction: 'Buffalo (I,:) BP - K (I) 'Atul NarkhedeNo ratings yet
- C Programming LabDocument20 pagesC Programming LabGanesh KumarNo ratings yet
- MATLAB Source Code 2Document10 pagesMATLAB Source Code 2Sardar KamranNo ratings yet
- Linear Control Systems Lab: E X Per I M E NT NO: 1Document17 pagesLinear Control Systems Lab: E X Per I M E NT NO: 1Syed Shehryar Ali NaqviNo ratings yet
- MATLAB Lab Report for Computational LabDocument57 pagesMATLAB Lab Report for Computational LabRushi GoreNo ratings yet
- Advanced Optimization Using MATLAB by EndalewDocument22 pagesAdvanced Optimization Using MATLAB by EndalewMerera TaresaNo ratings yet
- Lesson 5: Selection: Akos Ledeczi and Mike FitzpatrickDocument29 pagesLesson 5: Selection: Akos Ledeczi and Mike FitzpatrickVidvendu GuptaNo ratings yet
- Matlav Code AssignmentDocument4 pagesMatlav Code AssignmentkthshlxyzNo ratings yet
- FminconDocument3 pagesFminconБогдан КулиничNo ratings yet
- Op Tim IzationDocument3 pagesOp Tim IzationEnaqkat PainavNo ratings yet
- Numerical Analysis All Lab ReportsDocument23 pagesNumerical Analysis All Lab ReportsZia JanNo ratings yet
- Fsolve 1Document16 pagesFsolve 1mrloadmovieNo ratings yet
- matlab_tutorial2Document20 pagesmatlab_tutorial2dlathdbs64No ratings yet
- Matlav Code AssignmentDocument4 pagesMatlav Code AssignmentkthshlxyzNo ratings yet
- Fsolve - Optimization ToolboxDocument6 pagesFsolve - Optimization ToolboxSmida ChahinezNo ratings yet
- Nonlinear EquationsDocument12 pagesNonlinear EquationsElőd JobbNo ratings yet
- Operators and ExpressionsDocument16 pagesOperators and Expressionssonali guptaNo ratings yet
- CodeDocument5 pagesCodeAbhay SharmaNo ratings yet
- Bai Tap 2Document21 pagesBai Tap 2Bơ BòNo ratings yet
- Assno 2Document3 pagesAssno 2riyamondalkolkataindiaNo ratings yet
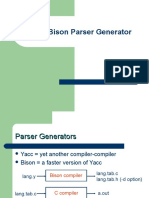
- Yacc / Bison Parser GeneratorDocument19 pagesYacc / Bison Parser GeneratorBlejan LarisaNo ratings yet
- Rosenbrock Function Optimization Using Gradient DescentDocument27 pagesRosenbrock Function Optimization Using Gradient DescentlarasmoyoNo ratings yet
- Applied Numerical AnalysisDocument9 pagesApplied Numerical AnalysisAwostatewos ApofaniosNo ratings yet
- Find Minimum of Unconstrained Multivariable Function Using Derivative-Free Method - MATLAB FminsearchDocument5 pagesFind Minimum of Unconstrained Multivariable Function Using Derivative-Free Method - MATLAB FminsearchCristian Giovanny Gomez OlarteNo ratings yet
- ImfilterDocument7 pagesImfilterAhmad BasNo ratings yet
- Quiz # 1 Bisection Method: Name: Inam Ur Rehman Roll Number: 170596Document3 pagesQuiz # 1 Bisection Method: Name: Inam Ur Rehman Roll Number: 170596Inam Ur RehmanNo ratings yet
- Homework 8 Akino 6.20: MATLAB CODEDocument3 pagesHomework 8 Akino 6.20: MATLAB CODEakinojohnkennedyNo ratings yet
- Function: 'Gui - Name' 'Gui - Singleton' 'Gui - Openingfcn' 'Gui - Outputfcn' 'Gui - Layoutfcn' 'Gui - Callback'Document5 pagesFunction: 'Gui - Name' 'Gui - Singleton' 'Gui - Openingfcn' 'Gui - Outputfcn' 'Gui - Layoutfcn' 'Gui - Callback'eladNo ratings yet
- Numerical Methods Lab Part 2Document34 pagesNumerical Methods Lab Part 2Eyu KalebNo ratings yet
- Document 1Document9 pagesDocument 1Kumar RajeshwarNo ratings yet
- Secant and Modify Secant Method: Prum Sophearith E20170706Document11 pagesSecant and Modify Secant Method: Prum Sophearith E20170706rithNo ratings yet
- MixedDocument13 pagesMixeddayoladejo777100% (1)
- C OperatorsDocument49 pagesC OperatorsKunda Basetty ThrishaNo ratings yet
- Lecture 02: Matlab ProgrammingDocument37 pagesLecture 02: Matlab ProgrammingBirhex FeyeNo ratings yet
- Numerical Methods, Root Finding Assignment. Muhammad Ahmed Zaheer, BSME 18-22Document21 pagesNumerical Methods, Root Finding Assignment. Muhammad Ahmed Zaheer, BSME 18-22Ahmed ZaheerNo ratings yet
- Term Project: Genetic Algorithm in Engineering Process ModellingDocument10 pagesTerm Project: Genetic Algorithm in Engineering Process ModellingArka MitraNo ratings yet
- MATHLIB 1.1-0 98/09/11: Example MacroDocument3 pagesMATHLIB 1.1-0 98/09/11: Example MacroAhmed conanNo ratings yet
- Matlab Session 4Document20 pagesMatlab Session 4ddsfathNo ratings yet
- Question No 1. (B) : 'Enter No of Independent Variables: 'Document19 pagesQuestion No 1. (B) : 'Enter No of Independent Variables: 'Khurram ShahzadNo ratings yet
- 6 OperatorsDocument27 pages6 Operatorsyevitoy306No ratings yet
- VERILOGDocument28 pagesVERILOGSai KiranNo ratings yet
- Ce007 Ce31s2 Exer2 GRP3Document4 pagesCe007 Ce31s2 Exer2 GRP3ernestNo ratings yet
- LMSPDocument7 pagesLMSPPesta SigalinggingNo ratings yet
- Introducere in Matlab PDFDocument77 pagesIntroducere in Matlab PDFAlecs BalaNo ratings yet
- Optimization For DummiesDocument5 pagesOptimization For DummiesMauricio BedoyaNo ratings yet
- Tutorial Questions On Fuzzy Logic 1. A Triangular Member Function Shown in Figure Is To Be Made in MATLAB. Write A Function. Answer: CodeDocument13 pagesTutorial Questions On Fuzzy Logic 1. A Triangular Member Function Shown in Figure Is To Be Made in MATLAB. Write A Function. Answer: Codekiran preethiNo ratings yet
- Etsi TS 103 574Document12 pagesEtsi TS 103 574Ishan DarwhekarNo ratings yet
- C-V2X - A Communication Technology For Cooperative, Connected and Automated MobilityDocument6 pagesC-V2X - A Communication Technology For Cooperative, Connected and Automated MobilityIshan DarwhekarNo ratings yet
- All All: %N Input ('Enter Array Length ')Document1 pageAll All: %N Input ('Enter Array Length ')Ishan DarwhekarNo ratings yet
- 5G V2X System-Level Architecture of 5GCAR Project: Future InternetDocument26 pages5G V2X System-Level Architecture of 5GCAR Project: Future InternetIshan DarwhekarNo ratings yet
- R, N CalculationDocument3 pagesR, N CalculationIshan DarwhekarNo ratings yet
- ACD CAL 2018-19 After Senate Approval 27122017 PDFDocument2 pagesACD CAL 2018-19 After Senate Approval 27122017 PDFIshan DarwhekarNo ratings yet
- Indian Institute of Technology Bombay Powai, Mumbai - 400 076 Autumn Semester, Academic Year: 2018 19Document2 pagesIndian Institute of Technology Bombay Powai, Mumbai - 400 076 Autumn Semester, Academic Year: 2018 19Ishan DarwhekarNo ratings yet
- Conference Management Toolkit - Submission SummaryDocument1 pageConference Management Toolkit - Submission SummaryIshan DarwhekarNo ratings yet
- ACD CAL 2018-19 After Senate Approval 27122017 PDFDocument2 pagesACD CAL 2018-19 After Senate Approval 27122017 PDFIshan DarwhekarNo ratings yet
- IJARCCE3F S Sachin SuburbanDocument5 pagesIJARCCE3F S Sachin SuburbanIshan DarwhekarNo ratings yet
- VHDL 1.Document5 pagesVHDL 1.SanjayaRangaLSenavirathnaNo ratings yet
- AdderfajbalfjDocument34 pagesAdderfajbalfjIshan DarwhekarNo ratings yet
- Behavioral Modeling: 1. Design A 4:1 MUXDocument5 pagesBehavioral Modeling: 1. Design A 4:1 MUXIshan DarwhekarNo ratings yet
- ProgramDocument1 pageProgramIshan DarwhekarNo ratings yet
- QhlogsDocument1 pageQhlogsMohit KoladiaNo ratings yet
- Wireless Communication by RappaportDocument640 pagesWireless Communication by RappaportIshankN100% (2)
- Date: 28 September, 2015: VHDL Assighment 2Document15 pagesDate: 28 September, 2015: VHDL Assighment 2Ishan DarwhekarNo ratings yet
- HBDBHFGBDocument1 pageHBDBHFGBIshan DarwhekarNo ratings yet
- Lab 4Document23 pagesLab 4Ishan DarwhekarNo ratings yet
- Generating Even, Odd, Shifting and Scaling Plots: ObjectiveDocument5 pagesGenerating Even, Odd, Shifting and Scaling Plots: ObjectiveqwertyNo ratings yet
- Microstrip Patch Antennas Design Guide SummaryDocument1 pageMicrostrip Patch Antennas Design Guide SummaryIshan DarwhekarNo ratings yet
- VHDL ASSIGNMENT DOCUMENT DESIGNS BASIC LOGIC GATES AND 4-BIT BINARY UP COUNTERDocument9 pagesVHDL ASSIGNMENT DOCUMENT DESIGNS BASIC LOGIC GATES AND 4-BIT BINARY UP COUNTERIshan DarwhekarNo ratings yet
- Date: 28 September, 2015: VHDL Assighment 2Document15 pagesDate: 28 September, 2015: VHDL Assighment 2Ishan DarwhekarNo ratings yet
- Visvesvarya National Institute of Technology Nagpur: ECE BTECH 15-19 Device Modelling Lab Assignment 4Document21 pagesVisvesvarya National Institute of Technology Nagpur: ECE BTECH 15-19 Device Modelling Lab Assignment 4Ishan DarwhekarNo ratings yet
- MUSIC and Jlblajbdlasdnimproved MUSIC AlgoDocument5 pagesMUSIC and Jlblajbdlasdnimproved MUSIC AlgoIshan DarwhekarNo ratings yet
- DM ESD EMB Cmos DC Lab ESD DM DC DSP Emb Lab DM Lab ESD EMB DC DSP DSP Lab EMB Cmos DM Cmos DSP DCDocument1 pageDM ESD EMB Cmos DC Lab ESD DM DC DSP Emb Lab DM Lab ESD EMB DC DSP DSP Lab EMB Cmos DM Cmos DSP DCIshan DarwhekarNo ratings yet
- FminconDocument11 pagesFminconTareq Abdussalam KhamllagNo ratings yet
- Expt7hkvgc JNMBDocument6 pagesExpt7hkvgc JNMBIshan DarwhekarNo ratings yet
- Mats Officedocument - Wordprocessingml.documentrendition1 3Document18 pagesMats Officedocument - Wordprocessingml.documentrendition1 3Annie Lyn FaelnarNo ratings yet
- BachelorprojektDocument29 pagesBachelorprojektKaroline SternNo ratings yet
- Design & Implementation of Linux Based Network Forensic System Using HoneynetDocument5 pagesDesign & Implementation of Linux Based Network Forensic System Using HoneynetIjarcet JournalNo ratings yet
- (Hawley) - The Practice of Silviculture (1946)Document380 pages(Hawley) - The Practice of Silviculture (1946)Karpincho30% (1)
- An Introduction To Acoustics PDFDocument296 pagesAn Introduction To Acoustics PDFmatteo_1234No ratings yet
- HPS100 2016F SyllabusDocument6 pagesHPS100 2016F SyllabusxinNo ratings yet
- Q4-Hinge Theorem-ActivityDocument2 pagesQ4-Hinge Theorem-ActivityEmelie HernandezNo ratings yet
- Numark Orbit - VirtualDJ 8 Operation GuideDocument13 pagesNumark Orbit - VirtualDJ 8 Operation GuideCasiLokoNo ratings yet
- Introduction To Hse Benchmarking: Symposium Series No. 156 Hazards Xxii # 2011 IchemeDocument8 pagesIntroduction To Hse Benchmarking: Symposium Series No. 156 Hazards Xxii # 2011 IchemeLegend AnbuNo ratings yet
- Crossword PuzzleDocument2 pagesCrossword PuzzleGege MendozaNo ratings yet
- Tolerances of A Polystyrene Film: 2.2.25. ABSORPTION Spectrophotometry, Ultraviolet and VisibleDocument3 pagesTolerances of A Polystyrene Film: 2.2.25. ABSORPTION Spectrophotometry, Ultraviolet and Visibleivan cuadradoNo ratings yet
- Itp 8Document5 pagesItp 8Arung IdNo ratings yet
- Wilkes PDFDocument2 pagesWilkes PDFReyes Lopez EstebanNo ratings yet
- Thesis Statement Examples On GovernmentDocument4 pagesThesis Statement Examples On Governmentpuzinasymyf3100% (2)
- Kinds of Adverbs Lesson PlanDocument4 pagesKinds of Adverbs Lesson PlanSuliat SulaimanNo ratings yet
- Revision WorksheetDocument1 pageRevision WorksheetTashana GoweNo ratings yet
- Fourth Assignment.: Summary - Outcome of The ProgramDocument2 pagesFourth Assignment.: Summary - Outcome of The ProgramHasvdkNo ratings yet
- Oil Based Mud ThinnerDocument2 pagesOil Based Mud ThinnerjangriNo ratings yet
- Being in Control: The Fact That Variation Exists Means SPC Is Critical To Monitor Process BehaviourDocument2 pagesBeing in Control: The Fact That Variation Exists Means SPC Is Critical To Monitor Process BehaviourdumbledoreaaaaNo ratings yet
- TANCET Model Question Paper For Me EEE PDFDocument51 pagesTANCET Model Question Paper For Me EEE PDFsree ramNo ratings yet
- FY2010 DSM-IV-TR Summary: Division of Juvenile Justice State of Alaska, DHSSDocument15 pagesFY2010 DSM-IV-TR Summary: Division of Juvenile Justice State of Alaska, DHSSGnostic43No ratings yet
- Ijser: Failure Modes of RC Columns Under LoadingDocument22 pagesIjser: Failure Modes of RC Columns Under LoadingSidharth KambleNo ratings yet