You might also like
- Manipulator Kinematics Set 2 PDFDocument56 pagesManipulator Kinematics Set 2 PDFmohammad sammeerNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
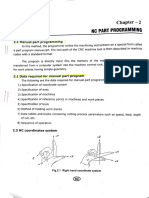
- CNC BasicDocument89 pagesCNC BasicSushil ThakkarNo ratings yet
- Base Plate CheckDocument7 pagesBase Plate CheckMike NakakuboNo ratings yet
- Single Point Cutting ToolDocument26 pagesSingle Point Cutting ToolSanjay SainNo ratings yet
- Tool GeometryDocument66 pagesTool Geometrypotnuru JaivanthNo ratings yet
- Computerized Numerical Control (CNC) SystemDocument42 pagesComputerized Numerical Control (CNC) SystemChristian Joy HerreraNo ratings yet
- New Calibration and Computing Method For Direct Georeferencing of Image and Scanner Data Using PDFDocument17 pagesNew Calibration and Computing Method For Direct Georeferencing of Image and Scanner Data Using PDFkumarjitNo ratings yet
- PMC Basic FinalDocument56 pagesPMC Basic FinalvinothkumarNo ratings yet
- Perhitungan Tangga Baja LRT JDocument19 pagesPerhitungan Tangga Baja LRT JwidyafmNo ratings yet
- Kinematic Models and ConstraintsDocument43 pagesKinematic Models and Constraintsanitha_eswaranNo ratings yet
- AE3211-I Systems Engineering and Aerospace DesignDocument69 pagesAE3211-I Systems Engineering and Aerospace DesignfuckNo ratings yet
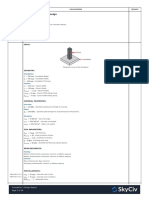
- Skyciv Foundation Design: InputDocument19 pagesSkyciv Foundation Design: InputNaim ZeinounNo ratings yet
- Foundation 1 Design ReportDocument18 pagesFoundation 1 Design Reportyolittle shiNo ratings yet
- Okuma FIXTURE OFFSET FUNCTIONDocument12 pagesOkuma FIXTURE OFFSET FUNCTIONEdwardNo ratings yet
- On Single Point Tool Geometry: Indian Institute of Technology DelhiDocument16 pagesOn Single Point Tool Geometry: Indian Institute of Technology DelhiDhananjay PatwariNo ratings yet
- Cam Practical TheoryDocument9 pagesCam Practical TheoryK RajeshNo ratings yet
- Mechanics of Machining: On Tool GeometryDocument16 pagesMechanics of Machining: On Tool GeometryEthan HuntNo ratings yet
- 5轴资料Document136 pages5轴资料jiabang liuNo ratings yet
- Foundation 1 Design ReportDocument9 pagesFoundation 1 Design ReportSameer KmNo ratings yet
- 3 D TransformationDocument10 pages3 D TransformationShaurya KapoorNo ratings yet
- ME8451 - Manufacturing Technology - II (Ripped From Amazon Kindle Ebooks by Sai Seena)Document598 pagesME8451 - Manufacturing Technology - II (Ripped From Amazon Kindle Ebooks by Sai Seena)NaveenNo ratings yet
- 3d Previous Year QuestionDocument3 pages3d Previous Year QuestionKriti VaishkyairNo ratings yet
- Banneker Skate Park CanopyDocument20 pagesBanneker Skate Park CanopyNagender KumarNo ratings yet
- Foundation 1 Design Reporte5Document7 pagesFoundation 1 Design Reporte5Herminia CalisayaNo ratings yet
- 001 - Introduction, Rectangular, Cylindrical, Spherical Coordinate SystemDocument46 pages001 - Introduction, Rectangular, Cylindrical, Spherical Coordinate SystemJayanthi Sree SundaramNo ratings yet
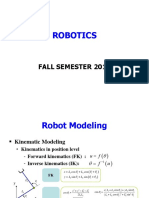
- Robotics: Fall Semester 2019Document23 pagesRobotics: Fall Semester 2019Saad Ikram CheemaNo ratings yet
- Section of Solids PDFDocument17 pagesSection of Solids PDFAmit GhadeNo ratings yet
- Maths of The Stewart Platform v5Document9 pagesMaths of The Stewart Platform v5Nadhifah HasnaNo ratings yet
- Introduction To RoboticsDocument32 pagesIntroduction To RoboticsNagarjun SinghNo ratings yet
- 2 303909749 TCP FanucDocument51 pages2 303909749 TCP FanucdiaboloboyNo ratings yet
- Mathematical Foundations of Photogrammetry, Metrology - The Second Part of PhotogrammetryDocument35 pagesMathematical Foundations of Photogrammetry, Metrology - The Second Part of PhotogrammetryFachriza AzmyNo ratings yet
- Camera Parameters Intrinsic - Extrinsic PDFDocument35 pagesCamera Parameters Intrinsic - Extrinsic PDFAhmad DanielNo ratings yet
- Free Space Optical Communication Tip-Tilt-Mirror BrochureDocument15 pagesFree Space Optical Communication Tip-Tilt-Mirror Brochuresandeep kumar100% (1)
- CNC Overview PDFDocument16 pagesCNC Overview PDFQuoc HuyNo ratings yet
- Bevel Gear01Document21 pagesBevel Gear01Viksit KumarNo ratings yet
- Commonly Used in Structural Geology Commonly Used in Min/crystalDocument27 pagesCommonly Used in Structural Geology Commonly Used in Min/crystalRogerio DiasNo ratings yet
- Lecture (3) : Surface Modeling: DR - Laith@uotechnology - Edu.iqDocument27 pagesLecture (3) : Surface Modeling: DR - Laith@uotechnology - Edu.iqraghunathreddyNo ratings yet
- Presentation 1Document27 pagesPresentation 1soniasuri80No ratings yet
- Three Dimensional RepresentationDocument33 pagesThree Dimensional RepresentationWafa ElgalhoudNo ratings yet
- Conic SectionDocument66 pagesConic SectionVansh MalhotraNo ratings yet
- Advances in Robotics Lecture 5.Document78 pagesAdvances in Robotics Lecture 5.AkashNo ratings yet
- Acdyn202225 2.RotationalDynamicsDocument26 pagesAcdyn202225 2.RotationalDynamicsDavid SchmidtNo ratings yet
- ISE370 RobotDynamicsDocument68 pagesISE370 RobotDynamicsRavinder Reddy SimalaNo ratings yet
- General Equations For Gear Cutting MachinesDocument4 pagesGeneral Equations For Gear Cutting MachinesMukul JainNo ratings yet
- Fanuc Basic Training CourseDocument74 pagesFanuc Basic Training CourseAhmed ShadeedNo ratings yet
- Torsion of Circular SectionsDocument10 pagesTorsion of Circular SectionsAbrham DubeNo ratings yet
- Basic Mathematics Sample Notes For NEET 2020 PreparationDocument5 pagesBasic Mathematics Sample Notes For NEET 2020 PreparationmisostudyNo ratings yet
- EE4213-Robotics and Mechatronics-Lecture 6-1Document22 pagesEE4213-Robotics and Mechatronics-Lecture 6-1Vishan Yujin WangNo ratings yet
- 15 Robotics IntroDocument116 pages15 Robotics IntroSuren EzNo ratings yet
- AN00128-000 Mint Based HPGLDocument6 pagesAN00128-000 Mint Based HPGLDhanar Tri AtmajaNo ratings yet
- Aubo I10 Brochure 2019 PDFDocument6 pagesAubo I10 Brochure 2019 PDFMiro Mirach PremrlNo ratings yet
- WINSEM2018-19 - MEE2006 - ETH - MB110 - VL2018195002136 - Reference Material II - Theory of Metal Cutting Part-3 Machining ForcesMCD (Compatibility Mode) PDFDocument27 pagesWINSEM2018-19 - MEE2006 - ETH - MB110 - VL2018195002136 - Reference Material II - Theory of Metal Cutting Part-3 Machining ForcesMCD (Compatibility Mode) PDFRishabh ChoudharyNo ratings yet
- 4 Conversion of Tool Angles From One System To AnotherDocument16 pages4 Conversion of Tool Angles From One System To AnotherPRASAD326100% (4)
- 550VS Dough MixerDocument2 pages550VS Dough MixerTrevor SalazarNo ratings yet
- Job Stress SurveyDocument4 pagesJob Stress SurveyTrevor SalazarNo ratings yet
- 1FT613-1FT616 Edition 03-2007Document136 pages1FT613-1FT616 Edition 03-2007Trevor SalazarNo ratings yet
- Inside Out Papercraft DisgustDocument1 pageInside Out Papercraft DisgustTrevor SalazarNo ratings yet
- Insude Out Papercraft AngerDocument1 pageInsude Out Papercraft AngerTrevor SalazarNo ratings yet
- R 30ib Plus FlyerDocument2 pagesR 30ib Plus FlyerRafael González ChacónNo ratings yet
- Flyer M 10id 12 ENDocument2 pagesFlyer M 10id 12 ENTrevor SalazarNo ratings yet
- 102 PDFDocument6 pages102 PDFTrevor SalazarNo ratings yet
- 1FK7060-5AF71-1FU5-Z D03+G31+H13 Datasheet enDocument2 pages1FK7060-5AF71-1FU5-Z D03+G31+H13 Datasheet enTrevor SalazarNo ratings yet
- Dawn C. Meredith, Meaning MakingDocument2 pagesDawn C. Meredith, Meaning MakingMrsriyansyahNo ratings yet
- Coding Assignment 18-WPS OfficeDocument9 pagesCoding Assignment 18-WPS Officetamj tamjNo ratings yet
- Bent's RuleDocument3 pagesBent's RuleEdwinNo ratings yet
- Psychometric Development and Validation of GaslightingDocument15 pagesPsychometric Development and Validation of GaslightingYang ZhangNo ratings yet
- UMTS Optimization GuidelineDocument84 pagesUMTS Optimization GuidelineEvelio Sotolongo100% (3)
- Homeassignment 4 (1) (1) - 2Document3 pagesHomeassignment 4 (1) (1) - 2hellokaun1072No ratings yet
- Beam Design: BackgroundDocument2 pagesBeam Design: BackgroundolomizanaNo ratings yet
- Configuration A: Unloaded BJT Transistor AmplifiersDocument3 pagesConfiguration A: Unloaded BJT Transistor AmplifiersdasdNo ratings yet
- LETRIST Locally Encoded Transform Feature HistograDocument16 pagesLETRIST Locally Encoded Transform Feature HistograHARE KRISHNANo ratings yet
- 00.concrete Mix Design-RailwayDocument38 pages00.concrete Mix Design-RailwaySoundar PachiappanNo ratings yet
- SC431 Lecture No. 4 Economic Comparisons (Continued)Document51 pagesSC431 Lecture No. 4 Economic Comparisons (Continued)Joseph BaruhiyeNo ratings yet
- FST 3000Document4 pagesFST 3000ariksyaiful82No ratings yet
- Study of Padmanabhapuram Palace TrivandrumDocument14 pagesStudy of Padmanabhapuram Palace Trivandrumcrustybubbles100% (2)
- Graphite PropertiesDocument42 pagesGraphite PropertiesAnnisa Puspa MustikaNo ratings yet
- Ijarece Vol 8 Issue 8 141 144Document4 pagesIjarece Vol 8 Issue 8 141 144Rnav rnavNo ratings yet
- Math Formula SheetDocument8 pagesMath Formula SheetHidayah TeacherNo ratings yet
- Leading The Industry In: Solar Microinverter TechnologyDocument2 pagesLeading The Industry In: Solar Microinverter TechnologydukegaloNo ratings yet
- Zbrush 4 ShortcutsDocument3 pagesZbrush 4 ShortcutsJNo ratings yet
- Engg Mechanics Ques BankDocument68 pagesEngg Mechanics Ques BankUtkalNo ratings yet
- Best Approach: Compound AngleDocument8 pagesBest Approach: Compound AngleAbhiyanshu KumarNo ratings yet
- Agfa CR 10XDocument4 pagesAgfa CR 10Xwisateru Inti niagaNo ratings yet
- 2010 Jan-01Document32 pages2010 Jan-01Shine PrabhakaranNo ratings yet
- C.KESAVAN - Diploma EEE: Phone No Mail IdDocument3 pagesC.KESAVAN - Diploma EEE: Phone No Mail IdKesavan ChinaswmiNo ratings yet
- Newvhdl Syllabus (It&Cse)Document2 pagesNewvhdl Syllabus (It&Cse)Mude Kishore NaikNo ratings yet
- HPC168 Passenger CounterDocument9 pagesHPC168 Passenger CounterRommel GómezNo ratings yet
- An FPGA Implementation of A Feed-Back Chaotic Synchronization For Secure CommunicationsDocument5 pagesAn FPGA Implementation of A Feed-Back Chaotic Synchronization For Secure Communicationslaz_chikhi1574No ratings yet
- QPT Charts BarDocument8 pagesQPT Charts BarKacak BergayaNo ratings yet
- Me (3) - 2Document16 pagesMe (3) - 2aviralNo ratings yet
- Naca 4412Document3 pagesNaca 4412Selva KumarNo ratings yet
- Multiple Choice Questions (The Answers Are Provided After The Last Question.)Document6 pagesMultiple Choice Questions (The Answers Are Provided After The Last Question.)VijendraNo ratings yet