You might also like
- AP040085EN - PowerXL DG1 Trouble Shooting GuideDocument19 pagesAP040085EN - PowerXL DG1 Trouble Shooting GuideandrecwtNo ratings yet
- SVX Troubleshooting GuideDocument24 pagesSVX Troubleshooting Guidemk saravananNo ratings yet
- Gecko Drive g340 - 815e28e418 PDFDocument7 pagesGecko Drive g340 - 815e28e418 PDFRemus PopescuNo ratings yet
- Baker D1200 Troubleshoot GuideDocument29 pagesBaker D1200 Troubleshoot GuideChristian LefroitNo ratings yet
- Maintenance & TroubleshootingDocument4 pagesMaintenance & TroubleshootingJovenlou BihagNo ratings yet
- Chapter 7. MAINTENANCE TroubleshootingDocument12 pagesChapter 7. MAINTENANCE TroubleshootingnasrunNo ratings yet
- Multiple Motors Single Drive Ap040212enDocument4 pagesMultiple Motors Single Drive Ap040212enMario LopezNo ratings yet
- OGO Dual Mode MAP-MAF Sensor EnhancerDocument5 pagesOGO Dual Mode MAP-MAF Sensor EnhancerDotunder GroundNo ratings yet
- PEEC Electronic System Functional TestsDocument66 pagesPEEC Electronic System Functional TestsRichard Chua0% (1)
- Maintenance & Troubleshooting: Problem IsolationDocument16 pagesMaintenance & Troubleshooting: Problem IsolationÁgost VitaNo ratings yet
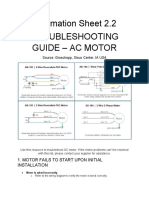
- Information Sheet 2.2 Troubleshooting Guide - Ac Motor: Source: Groschopp, Sioux Center, IA USADocument4 pagesInformation Sheet 2.2 Troubleshooting Guide - Ac Motor: Source: Groschopp, Sioux Center, IA USAthereseNo ratings yet
- Chapter 7 Troubleshooting and Fault InformationDocument3 pagesChapter 7 Troubleshooting and Fault Informationtricky777100% (1)
- Troubleshooting Your TBI Fuel Injection SystemDocument24 pagesTroubleshooting Your TBI Fuel Injection SystemAndres Enrique Gonzalez GilNo ratings yet
- Danfoss Drive - TechsupportcallsDocument10 pagesDanfoss Drive - TechsupportcallsTariq KhurshaidiNo ratings yet
- Pto Tec 116Document3 pagesPto Tec 116Wilber CastilloNo ratings yet
- Pump ED 101: Centrifugal Pump Motor Selection, Installation & Start UpDocument5 pagesPump ED 101: Centrifugal Pump Motor Selection, Installation & Start Upabdulyunus_amirNo ratings yet
- Cat 740B-2011Document17 pagesCat 740B-2011Tom Souza100% (2)
- Applied Motion 3540moDocument10 pagesApplied Motion 3540moPham TruongNo ratings yet
- User's Manual: Step Motor DriverDocument20 pagesUser's Manual: Step Motor DriverAdalmi Santos SilvaNo ratings yet
- Mercedes Benz ABC System Troubleshooting GuideDocument32 pagesMercedes Benz ABC System Troubleshooting GuidemohamedNo ratings yet
- FAQ For APT Controller: 1-Where Could I Download The Debug Use Instructions ? What Contents Would Be Included?Document7 pagesFAQ For APT Controller: 1-Where Could I Download The Debug Use Instructions ? What Contents Would Be Included?Сергей Карев0% (1)
- Troubleshooting An OV Overvoltage FaultDocument2 pagesTroubleshooting An OV Overvoltage FaultSHG AUTMEC MANUTENÇÃO E AUTOMAÇÃO MÁQ. INDUSTRIAISNo ratings yet
- How To Test ResolversDocument2 pagesHow To Test ResolversOrtiz Ab NelsonNo ratings yet
- 9907-Tips For TroubleshootingDocument7 pages9907-Tips For TroubleshootingnasrunNo ratings yet
- Ls Installation InstructionsDocument14 pagesLs Installation Instructionsdalekilgore84No ratings yet
- ABS fault code 5131 causes and fixesDocument3 pagesABS fault code 5131 causes and fixesPetar PetrovicNo ratings yet
- TROUBLESHOOTING GUIDEDocument5 pagesTROUBLESHOOTING GUIDEsabrahimaNo ratings yet
- 5 Common Myths and Misconceptions About Variable Frequency DrivesDocument9 pages5 Common Myths and Misconceptions About Variable Frequency Drivesarun manchekarNo ratings yet
- Dokumen - Tips - Indra Works Ds Tuning Procedure Ams Controls 2015 10 12 Continuing Place TheDocument19 pagesDokumen - Tips - Indra Works Ds Tuning Procedure Ams Controls 2015 10 12 Continuing Place TheSaanounNo ratings yet
- 6-06 Starting SystemDocument23 pages6-06 Starting SystemJ.A.G.ANo ratings yet
- 2002-04 Ford Escape Starting and Charging Systems GuideDocument26 pages2002-04 Ford Escape Starting and Charging Systems GuideluisNo ratings yet
- Ford 450Document16 pagesFord 450gerber damian100% (1)
- Troubleshooting VF DDocument7 pagesTroubleshooting VF DRichard BakerNo ratings yet
- Basic TroubleshootingDocument3 pagesBasic TroubleshootingJeremy RydmanNo ratings yet
- Battery Maintenance TipsDocument5 pagesBattery Maintenance TipsGunjan SumanNo ratings yet
- F05 Fault On An Allen BradleyDocument12 pagesF05 Fault On An Allen Bradleymextico06No ratings yet
- Stepper - Why Steppers Loose Steps - WPDocument4 pagesStepper - Why Steppers Loose Steps - WPIzzHyukNo ratings yet
- Car Heater Not Blowing Air - Here's How To Fix It - Rustyautos - Com - Reader ViewDocument10 pagesCar Heater Not Blowing Air - Here's How To Fix It - Rustyautos - Com - Reader Viewabet_singkong8930No ratings yet
- Top 10 Danfoss Drive Tech SupportcallsDocument9 pagesTop 10 Danfoss Drive Tech SupportcallsSilvio NetoNo ratings yet
- 2 Disconnect The Yellow WiresDocument1 page2 Disconnect The Yellow Wiresanderson valerioNo ratings yet
- Variable Frequency Drive (VFD) Interview QuestionsDocument9 pagesVariable Frequency Drive (VFD) Interview QuestionsMohammad Badii MosliNo ratings yet
- DTC P0340/P0344/P0345/P0349-4.6L 3V and 5.4L 3V TSB 06-19-12Document4 pagesDTC P0340/P0344/P0345/P0349-4.6L 3V and 5.4L 3V TSB 06-19-12jose perezNo ratings yet
- Parker SSD 650 Easy Start GuideDocument17 pagesParker SSD 650 Easy Start Guideeng_karamazabNo ratings yet
- Pre-Lab Due Before Performing The Experiment: Induction Motor DC GenerationDocument11 pagesPre-Lab Due Before Performing The Experiment: Induction Motor DC GenerationtrebeardNo ratings yet
- Start TestDocument2 pagesStart Testhelp3rNo ratings yet
- Wabco C Type - p38Document0 pagesWabco C Type - p38Richard Andrianjaka LuckyNo ratings yet
- Johnson/Evinrude 60° 4 Cylinder Optical Ignition (OIS 2000) Carbureted 1995-2006 Model YearsDocument4 pagesJohnson/Evinrude 60° 4 Cylinder Optical Ignition (OIS 2000) Carbureted 1995-2006 Model YearsАлександр КачеишвилиNo ratings yet
- All-Test Iv Pro: Motor Circuit AnalyzerDocument6 pagesAll-Test Iv Pro: Motor Circuit AnalyzerJorge Luis Torrico CalatayudNo ratings yet
- How It Operates:: Mastercraft 2007 Troubleshooting (Electronic Throttle Engines)Document7 pagesHow It Operates:: Mastercraft 2007 Troubleshooting (Electronic Throttle Engines)AlbertoJim90No ratings yet
- Troubleshoot VFDs with MeasurementsDocument23 pagesTroubleshoot VFDs with MeasurementsArvind NangareNo ratings yet
- Chapter 7 Error Message and Troubleshooting: Problems and Solutions Code Displayed Error Explanations TreatmentsDocument5 pagesChapter 7 Error Message and Troubleshooting: Problems and Solutions Code Displayed Error Explanations Treatmentstricky777No ratings yet
- Charging System Troubleshooting (1406) : Instrucción EspecialDocument16 pagesCharging System Troubleshooting (1406) : Instrucción EspecialMiguel GutierrezNo ratings yet
- Ver Paginas 18 y 19Document28 pagesVer Paginas 18 y 19Taller PahrNo ratings yet
- Setting Voltage DroopDocument5 pagesSetting Voltage DroopvaluedynamicmarineNo ratings yet
- PowerFlex 700S High Performance AC Drives and 700H Adjustable Frequency AC Drives POWERUPDocument6 pagesPowerFlex 700S High Performance AC Drives and 700H Adjustable Frequency AC Drives POWERUPDoug McMamaraNo ratings yet
- Diesel Engine Care and Repair: A Captain's Quick GuideFrom EverandDiesel Engine Care and Repair: A Captain's Quick GuideRating: 5 out of 5 stars5/5 (1)
- Marine Electrics Made Simple or How to Keep the Batteries ChargedFrom EverandMarine Electrics Made Simple or How to Keep the Batteries ChargedNo ratings yet
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- WV92Q248 01gb Instrument Air SystemDocument8 pagesWV92Q248 01gb Instrument Air SystemwilsonNo ratings yet
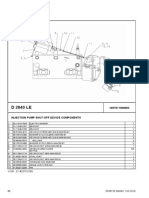
- Páginas de 416505415 Man 2840 Le Engine Spare Parts CatalogueDocument1 pagePáginas de 416505415 Man 2840 Le Engine Spare Parts CataloguewilsonNo ratings yet
- Dkddpb551a102 PG Soft Starter LRDocument64 pagesDkddpb551a102 PG Soft Starter LRwilsonNo ratings yet
- Man D 2866 E, D 2866 Te Exhaust-Gas Turbochargers 4Document1 pageMan D 2866 E, D 2866 Te Exhaust-Gas Turbochargers 4wilson0% (2)
- L16/24 Engine Parts - Exchange Service: TurbochargerDocument1 pageL16/24 Engine Parts - Exchange Service: TurbochargerwilsonNo ratings yet
- Cleaning The Turbocharger in Operation: GeneralDocument8 pagesCleaning The Turbocharger in Operation: GeneralwilsonNo ratings yet
- Technical Information Technical Information: InjectionDocument4 pagesTechnical Information Technical Information: InjectionwilsonNo ratings yet
- Control Air Upgrade Kit For Oil Mist Detector (OMD) : Service LetterDocument21 pagesControl Air Upgrade Kit For Oil Mist Detector (OMD) : Service LetterwilsonNo ratings yet
- 10 to 185 BHP Generator Technical Specifications Sheet 1Document1 page10 to 185 BHP Generator Technical Specifications Sheet 1wilsonNo ratings yet
- Plate 70613-40D Cleaning of Turbine SideDocument1 pagePlate 70613-40D Cleaning of Turbine SidewilsonNo ratings yet
- Turbocharger System 612.01: Description Page 1 (2) Edition 22HDocument7 pagesTurbocharger System 612.01: Description Page 1 (2) Edition 22HwilsonNo ratings yet
- Project Guide L16/24: Exhaust Gas SystemDocument15 pagesProject Guide L16/24: Exhaust Gas SystemwilsonNo ratings yet
- Overhauling Engine Components GuideDocument1 pageOverhauling Engine Components GuidewilsonNo ratings yet
- C1. RTA48T Engine: Engine Selection and Project ManualDocument12 pagesC1. RTA48T Engine: Engine Selection and Project Manualwilson100% (1)
- Em Generator 6cta8.3 Parts Catalog 6CT Turbocharger 15 PDFDocument15 pagesEm Generator 6cta8.3 Parts Catalog 6CT Turbocharger 15 PDFwilsonNo ratings yet
- Volvo TAD734GE 9L Engine ManualDocument1 pageVolvo TAD734GE 9L Engine ManualwilsonNo ratings yet
- Engine Selection and Project Manual: C1. RTA48T EngineDocument1 pageEngine Selection and Project Manual: C1. RTA48T EnginewilsonNo ratings yet
- The Clayton Guide To Steam Generation 15Document1 pageThe Clayton Guide To Steam Generation 15wilsonNo ratings yet
- N:/Turbine General Informetions .Nikolaos Kampitsis/Gas TurbineDocument12 pagesN:/Turbine General Informetions .Nikolaos Kampitsis/Gas TurbinewilsonNo ratings yet
- 10 to 185 BHP Generator Technical Specifications Sheet 1Document1 page10 to 185 BHP Generator Technical Specifications Sheet 1wilsonNo ratings yet
- Turbine Gas G.T.G. 1Document17 pagesTurbine Gas G.T.G. 1wilsonNo ratings yet
- Technical Specifications Sheet 3 - : 600 To 1300 BHPDocument1 pageTechnical Specifications Sheet 3 - : 600 To 1300 BHPwilsonNo ratings yet
- Turbocharger System 612.01: Description Page 1 (2) Edition 22HDocument7 pagesTurbocharger System 612.01: Description Page 1 (2) Edition 22HwilsonNo ratings yet
- B&W Service Experience MC Engines Guiding Overhaul Intervals 1Document1 pageB&W Service Experience MC Engines Guiding Overhaul Intervals 1wilsonNo ratings yet
- Volvo-Tad734ge Manual 4Document1 pageVolvo-Tad734ge Manual 4wilsonNo ratings yet
- The Clayton Guide To Steam Generation 15Document1 pageThe Clayton Guide To Steam Generation 15wilsonNo ratings yet
- Turbocharger System 612.01: Description Page 1 (2) Edition 22HDocument7 pagesTurbocharger System 612.01: Description Page 1 (2) Edition 22HwilsonNo ratings yet
- Cleaning The Turbocharger in Operation: GeneralDocument8 pagesCleaning The Turbocharger in Operation: GeneralwilsonNo ratings yet
- Engine Selection and Project Manual: C1. RTA48T EngineDocument1 pageEngine Selection and Project Manual: C1. RTA48T EnginewilsonNo ratings yet
- B&W 6l16-24 Combustian Air System 15Document15 pagesB&W 6l16-24 Combustian Air System 15wilson0% (1)
- The Google File System - A Scalable Distributed Storage SystemDocument4 pagesThe Google File System - A Scalable Distributed Storage SystemMarco50% (2)
- RTXM192-xxx DDMDocument16 pagesRTXM192-xxx DDMmatsmats1No ratings yet
- PDF Embed User Manual PDFDocument8 pagesPDF Embed User Manual PDFmsalguerNo ratings yet
- Midterm Exam - Attempt ReviewlogicDocument14 pagesMidterm Exam - Attempt ReviewlogicRusty 69No ratings yet
- Access 2013 Cheat SheetDocument3 pagesAccess 2013 Cheat SheetelecmaticNo ratings yet
- Manual Robo ScanDocument19 pagesManual Robo ScanRodrigo CardinotNo ratings yet
- Thinkpad T14 Gen 1 (Amd) : Business Devices That Are A Class ApartDocument2 pagesThinkpad T14 Gen 1 (Amd) : Business Devices That Are A Class ApartLuisNo ratings yet
- Model1 COA 2022Document2 pagesModel1 COA 2022Hritik KaulNo ratings yet
- 4099R-832bitMCUProdGuide E US 090513 Online PDFDocument40 pages4099R-832bitMCUProdGuide E US 090513 Online PDFGerko Berrios GarcíaNo ratings yet
- T.5.4.7 KVM Console PDFDocument19 pagesT.5.4.7 KVM Console PDFLeoNo ratings yet
- MN - Acb 531-631Document36 pagesMN - Acb 531-631Anonymous p3a7bsNo ratings yet
- (DBA 211) - Berry DBA 211 - 2014Document50 pages(DBA 211) - Berry DBA 211 - 2014TechypyNo ratings yet
- Transceiver: Quick Reference GuideDocument4 pagesTransceiver: Quick Reference GuideEmerson Luis SternNo ratings yet
- Condition Code Flags in APSRDocument25 pagesCondition Code Flags in APSRSamreenNo ratings yet
- Interview QuestionsDocument23 pagesInterview QuestionsSumanth VarmaNo ratings yet
- IP Code StandardsDocument5 pagesIP Code StandardsPuneet SharmaNo ratings yet
- System Sensor EPS40 Data SheetDocument2 pagesSystem Sensor EPS40 Data SheetJMAC SupplyNo ratings yet
- FTTH Nar Solutions Br-111600-EnDocument24 pagesFTTH Nar Solutions Br-111600-EnJarryd BatoNo ratings yet
- AltaafDocument25 pagesAltaafzaky chanNo ratings yet
- RAID Technology The OneDocument36 pagesRAID Technology The OneAi Zil ZaczsNo ratings yet
- Meter ReferenceDocument2 pagesMeter ReferenceJoseph TingNo ratings yet
- Floating-Gate MOSFET: From Wikipedia, The Free EncyclopediaDocument4 pagesFloating-Gate MOSFET: From Wikipedia, The Free EncyclopediaAtul RainaNo ratings yet
- CS 8000 CS8000 Carestream User ManualDocument44 pagesCS 8000 CS8000 Carestream User ManualMatias Morales100% (1)
- KBL 7900 Assembly ManualDocument11 pagesKBL 7900 Assembly ManualPaulmankeNo ratings yet
- Jarvis Documentation: Release 0.1.2Document17 pagesJarvis Documentation: Release 0.1.2John SmithNo ratings yet
- The Secret Power by Corelli, Marie, 1855-1924Document199 pagesThe Secret Power by Corelli, Marie, 1855-1924Gutenberg.orgNo ratings yet
- TP 8452 ApDocument20 pagesTP 8452 ApSameera MadushankaNo ratings yet
- Real Steel CatalogueDocument13 pagesReal Steel CataloguenicehornetNo ratings yet
- IMEX Catalogue 2008Document85 pagesIMEX Catalogue 2008Instrulife OostkampNo ratings yet