EC6502 – Principles of Digital Signal Processing V Semester – Question Bank
UNIT I – DISCRETE FOURIER TRANSFORM
PART A
DFT AND ITS PROPERTIES
1. Define – Discrete Fourier Transformation (DFT) of a sequence x(n)
2. Write the formula for N-point IDFT of a sequence X(k).
3. What is twiddle factor? [N/D – 12 R08]
4. Calculate the 4-point DFT of the sequence . [M/J – 13 R08]
5. n
Compute the DFT of a sequence (–1) for N = 4. [N/D – 12 R04]
6. Compute the N-point DFT of the signal [N/D – 10 R04]
7. Determine the DFT of the sequence [N/D – 06 R04]
8. Calculate the DFT of the sequence x(n) = { 1, 1, 0, 0}.
9. What is zero padding? What are its uses? [N/D – 13 R08] [N/D – 11 R08]
10. List out any four properties of DFT.
11. State the time shifting property of DFT.
12. State the circular frequency shifting property of DFT.
13. Prove that H(k) and H(N – k) are complex conjugates, If H(k) is the N-point DFT of a sequence
h(n). [N/D – 08 R04]
14. State and prove Parseval’s relation for DFT. [N/D – 07 R04]
15. State the convolution property of DFT. [A/M – 08 R04]
16. Distinguish between linear and circular convolution of two sequences.
17. Obtain the circular convolution of the following sequences
and [N/D – 10 R08]
18. The first five DFT coefficients of a sequence are X
Determine the remaining DFT coefficients. [M/J – 07 R04]
19. Distinguish between Discrete Time Fourier Transform (DTFT) and Discrete Fourier Transform
(DFT). [M/J – 12 R08] [N/D – 11 R08] [A/M – 11 R04]
20. Write the relationship between DTFT and DFT. [N/D – 10 R04]
21. Distinguish between DFT and DTFT. [M/J – 14 R04]
22. What is the relationship between Z-transform and DFT? [N/D – 09 R04]
23. How many multiplications and additions are required to compute N-point DFT using direct
method?
FFT COMPUTATIONS USING DECIMATION IN TIME AND DECIMATION IN
FREQUENCY ALGORITHMS
24. What is FFT? [N/D – 06 R04]
25. What is meant by radix-2 FFT? [N/D – 09 R04]
26. What are the applications of FFT algorithm?
27. What is in-place computation? [N/D – 14 R08][M/J – 13 R08]
28. What is meant by bit reversal? [M/J – 14 R08][A/M – 11 R08] [N/D – 07 R04]
29. Draw the basic Butterfly diagram of radix-2 FFT. [A/M – 08 R04]
30. Draw the basic Butterfly structure for radix-2 Decimation In Time algorithm. [N/D – 12 R04]
31. What is Decimation In Time (DIT) algorithm?
32. What is Decimation In Frequency (DIF) algorithm?
33. Compare DIT algorithm with DIF algorithm.
34. How many stages of decimation are required in the case of a 64-point radix-2
DIT-FFT algorithm? [N/D – 12 R08]
Department of Electronics and Communication Engineering 2
EC6502 – Principles of Digital Signal Processing V Semester – Question Bank
35. Determine the number of multiplications required in the computation of 8-point DFT using FFT.
[M/J – 12 R08]
36. How many multiplications and additions are required to compute N-Point DFT using radix-2
FFT? [N/D – 13 R08] [N/D – 10 R08]
37. Write the advantages of FFT over DFT. [A/M – 11 R08] [M/J – 07 R04]
38. Compare the number of multiplications required to compute the DFT of a 64-point sequence
using direct computation and that using FFT. [N/D – 14 R08]
39. Distinguish between decimation in time and decimation in frequency FFT algorithms.
[N/D – 08 R04]
OVERLAP-ADD AND SAVE METHODS
40. Differentiate overlap-add method from overlap-save method.
PART B
DFT AND ITS PROPERTIES
1. a) Differentiate DFT from DTFT. (4)
b) Compute an 8 point DFT of the sequence
(12) [N/D – 12 R08]
2. Compute the DFT of . (6) [M/J – 12 R08]
3. Determine the N-point DFT for the following sequences
a) x(n) = δ(n)
b) x(n) = δ(n – n0) (6) [N/D – 12 R08]
4. Determine the Discrete Fourier Transform of an aperiodic sequence,
Sketch the spectrum. (10) [N/D – 10 R04]
5. Determine the 4-point DFT of (8) [N/D – 09 R04]
6. List out the properties of DFT. (6) [N/D – 10 R08]
7. Explain the following properties of DFT: (16) [M/J – 12 R08]
a) Linearity
b) Complex conjugate property
c) Circular Convolution
d) Time Reversal
8. State and prove any four properties of DFT. (16) [N/D – 12 R04]
9. State and prove the following properties of DFT:
a) Convolution
b) Time Reversal
c) Time Shift
d) Periodicity (12) [N/D – 09 R04]
10. a) Explain the following properties of DFT:
i) Time reversal
ii) Parsvel’s theorem (8) [M/J – 13 R08]
b) Compute linear convolution of the sequences ,
using DFT method. (8) [M/J – 13 R08]
11. a) Explain in detail, the important properties of the Discrete Fourier Transform. (8)
Department of Electronics and Communication Engineering 3
EC6502 – Principles of Digital Signal Processing V Semester – Question Bank
b) Compute the 4-point DFT of the sequence . (8) [A/M – 08 R04]
12. Calculate the output response of the given input sequence and
using DFT and IDFT method. (8) [N/D – 12 R04]
13. Two finite duration sequences are:
a) Calculate the 4-point DFT X(k) (5)
b) Calculate the 4-point DFT H(k) (5)
c) If Y(k) = X(k) H(k), determine y(n), the inverse DFT of Y(k) (6) [N/D – 08 R04]
14. Two finite duration sequences are:
a) Calculate the 4-point DFT X(k) (5)
b) Calculate the 4-point DFT H(k) (5)
c) If Y(k) = X(k) H(k), determine the inverse DFT y(n) of Y(k) and sketch it.
(6) [N/D – 07 R04]
15. Compute the DFT of the sequence whose values for one period is given by
(8) [N/D – 13 R08]
16. Evaluate the 8-point DFT for the following sequence using DIT-FFT algorithm
(8) [N/D – 13 R08]
FFT COMPUTATIONS USING DECIMATION IN TIME AND DECIMATION IN
FREQUENCY ALGORITHMS
17. Derive the necessary equations to draw the butterfly diagram of an 8-point radix-2
DIF-FFT algorithm and label it. (16) [M/J – 13 R08]
18. a) Prove that FFT algorithms helps in reducing the number of computations involved in DFT
computation. (6)
b) Compute 8-point DFT of the sequence using DIT-FFT algorithm.
(10) [N/D – 12 R08]
19. Explain Decimation In Time-FFT (DIT-FFT) algorithm for the 8-point DFT computation.
(10) [M/J – 12 R08]
20. Compute the 8-point DFT of the sequence using
radix-2 DIF algorithm. (10) [N/D – 11 R08]
21. Explain radix-2 DIF-FFT algorithm. Compare it with DIT-FFT algorithm. (16) [A/M – 11 R08]
22. Compute by using Decimation In Time – FFT for the sequences
,y , If .
(16) [A/M – 11 R04]
23. Compute the 8-point DFT of the sequence using radix-2
DIT algorithm. (10) [N/D – 10 R08]
Department of Electronics and Communication Engineering 4
EC6502 – Principles of Digital Signal Processing V Semester – Question Bank
24. Compute the 8-point DFT of the sequence by using the Decimation In
Frequency-FFT algorithm. (10) [N/D – 10 R08]
25. Determine the 4-point IDFT for the DFT coefficients by using
the radix-2 DIT-FFT algorithm. (6) [N/D – 10 R04]
26. Compute the DFT of the sequence using DIF-FFT algorithm.
(8) [N/D – 12 R04]
27. Compare the computational complexity of direct DFT computation with FFT computation of a
sequence, with N = 64. (4) [N/D – 09 R04]
28. Explain Decimation In Time-FFT algorithm for N = 8. (8) [N/D – 09 R04]
29. a) Explain the computation of 8-point DFT using Decimation In Time-FFT algorithm and draw
the signal flow graph. (8)
b) Using the above signal flow graph, compute DFT of
(8) [N/D – 07 R04] [N/D – 08 R04]
30. a) Explain the computation of 8-point DFT using Decimation In Frequency-FFT algorithm and
draw the signal flow graph. (8)
b) Using the above signal flow graph, compute DFT of
(8) [M/J – 07 R04]
31. a) Explain Decimation In Time algorithm and draw the butterfly line diagram for 8-point FFT.
(8)
b) Compute the 8-point DFT of the sequence using DIF-FFT radix-
2 algorithm. (8) [A/M – 08 R04]
32. a) Develop a 8 point DIT FFT algorithm. Draw the signal flow graph. Determine the DFT of the
following sequence using the signal flow graph. Show all the
intermediate results on the signal flow graph. (8)[M/J – 14 R08]
33. Evaluate the 8-point DFT for the following sequence using DIT-FFT algorithm
(8) [N/D 13 R08]
34. Compute the 8-point DFT of the sequence using DIT-FFT radix-2
algorithm. (10) [A/M – 14 R08]
35.
OVERLAP-ADD AND SAVE METHODS
36. Explain with appropriate diagrams, overlap-save method and overlap-add method for filtering of
long data sequences using DFT. (16)[M/J – 14 R08][A/M – 11 R08]
37. Explain overlap-add method for linear FIR filtering of a long sequence. (6) [N/D – 10 R08]
38. Compute the linear convolution of finite duration sequences and
by over-lap add method. (16) [N/D – 11 R08]
39. Summarize the difference between overlap-save method and overlap-add method.
(8)[N/D 13 R08]
Department of Electronics and Communication Engineering 5
EC6502 – Principles of Digital Signal Processing V Semester – Question Bank
UNIT II – INFINITE IMPULSE RESPONSE FILTERS
PART A
REVIEW OF DESIGN OF ANALOGUE BUTTERWORTH AND CHEBYSHEV FILTERS,
FREQUENCY TRANSFORMATION IN ANALOGUE DOMAIN
1. Why is Butterworth response called a maximally flat response? [N/D – 12 R08]
2. Compare Butterworth filter with Chebyshev filter. [N/D – 14 R08] [M/J – 12 R08]
3. List out the properties of Chebyshev filter. [A/M – 11 R08][N/D – 11 R08]
4. What is the importance of analog approximation in the design of a digital filter? [A/M – 11 R08]
5. List out the properties of Butterworth filter. [N/D – 10 R04]
6. Write any two properties of Butterworth and Chebyshev filters. [N/D – 06 R04]
7. What are the differences between IIR filter and FIR filter? [N/D – 12 R04]
8. What are the properties of IIR filter? [N/D – 11 R08]
9. What is Butterworth approximation?
10. How are the poles of Butterworth transfer function located in s- plane?
11. What is meant by Chebyshev approximation?
12. What is Type –1 Chebyshev approximation?
13. What is Type –2 Chebyshev approximation?
14. How is a digital filter designed from an analog filter? (or) Write the steps in design of digital
filter from analog filter. [N/D – 13 R08]
15. What are the advantages and disadvantages of a digital filter?
16. Sketch the frequency response of an odd and even order Chebyshev low pass filers.
[M/J – 14 R08]
DESIGN OF IIR DIGITAL FILTERS USING IMPULSE INVARIANCE TECHNIQUE
17. Convert the given analog transfer function into digital transfer function by impulse
invariant method. [M/J – 13 R08]
18. Compute the digital transfer function H(z) by using impulse invariant method for analog
transfer function H(s) = 1 /(s+2) . Assume T = 0.1 sec. [N/D – 07 R04]
19. What is the relationship between analog and digital frequency in impulse invariant
transformation? [A/M – 08 R04]
20. What are the limitations of impulse invariance mapping technique? [N/D – 09 R04]
21. Compute the digital transfer function H(z) by using impulse invariant method for analog
transfer function H(s) = 1 /(s+2) . Assume T = 0.5 sec. [M/J – 07 R04]
22. What is impulse invariant transformation?
DESIGN OF DIGITAL FILTERS USING BILINEAR TRANSFORM
23. What is meant by frequency warping? [N/D – 12 R08]
24. What is prewarping in digital filters?
[N/D – 10 R08][N/D – 08 R04][M/J – 12 R08] [N/D – 14 R08]
25. What is Bilinear transformation?
26. What is Bilinear transformation? What are the main advantages and disadvantages of this
technique? [M/J – 14 R08]
27. What is the relation between digital frequency and analog frequency in Bilinear transformation?
28. Compare the impulse invariant transformation with bilinear transformation.
Department of Electronics and Communication Engineering 6
EC6502 – Principles of Digital Signal Processing V Semester – Question Bank
REALIZATION USING DIRECT, CASCADE AND PARALLEL FORMS
29. What are the advantages of cascade realization? [M/J – 13 R08]
30. Draw the direct form structure of IIR filter. [N/D – 11 R08]
31. What is the advantage of direct form II realization over direct form I realization?
[N/D – 10 R08]
32. List out the different realization methods used for realizing recursive and non-recursive filters.
[N/D – 10 R04]
33. How many number of additions, multiplications and memory locations are required to realize a
system H(z) having M zeros and N poles in
a) Direct form – I realization
b) Direct form – II realization
34. What are the disadvantages of direct form realization? [N/D – 13 R08]
PART B
REVIEW OF DESIGN OF ANALOGUE BUTTERWORTH AND CHEBYSHEV FILTERS,
FREQUENCY TRANSFORMATION IN ANALOGUE DOMAIN
1. Explain the Butterworth filter approximation. (16) [M/J – 11 R08]
2. Design an analog Butterworth filter that has αp = 0.5 dB, αs = 0.8 dB, fp = 10 kHz and
fs = 25 kHz. (16) [N/D – 12 R04]
3. Explain the procedure for designing analog filters using the Chebyshev approximation.
(6) [N/D – 12 R08]
DESIGN OF IIR DIGITAL FILTERS USING IMPULSE INVARIANCE TECHNIQUE
4. Design a Butterworth filter using the impulse invariant technique for the specification
(16) [M/J – 13 R08]
5. Compute h(n) using impulse invariant method for the transfer function .
Assume T=1 sec. (8) [M/J – 12 R08]
6. Design a digital Butterworth filter using impulse invariant method (Assume T=1 sec) satisfying
the following constraints:
(16) [N/D – 11 R08]
7. Design a digital Butterworth filter satisfying the following specifications:
Apply impulse invariant transformation (T = 1 sec). (16) [N/D – 07 R04]
8. Determine H(z) using impulse invariant technique for the analog transfer function
. Assume T = 1sec. (6) [A/M – 08 R04]
9. Convert the analog transfer function into digital transfer function (Assume T = 0.1 sec).
using impulse invariant mapping. (8) [N/D – 09 R04]
Department of Electronics and Communication Engineering 7
EC6502 – Principles of Digital Signal Processing V Semester – Question Bank
10. Convert the following analog transfer function into digital using impulse invariant mapping with
T = 1 sec.
(10) [N/D – 12 R08]
DESIGN OF DIGITAL FILTERS USING BILINEAR TRANSFORM
11. Design a Butterworth filter using the bilinear transformation for the specification:
(16) [M/J – 12 R08]
12. Convert the analog filter with a transfer function into a digital IIR filter using
the Bilinear transformation. Assume T=1 sec. (8) [M/J – 13 R08]
13. Explain the Bilinear transformation of IIR filter design. What is warping effect? Explain the
poles and zeros mapping procedure. (16) [M/J – 11 R08]
14. Determine the system function H(z) of the Chebyshev low pass digital filter using bilinear
transformation (assume T=1 sec) with the specifications:
ripple in the pass band
ripple in the stop band . (16) [N/D – 10 R08]
15. Design a digital Butterworth filter that satisfies the following constraint using Bilinear
transformation (assume T = 1 sec)
(10) [A/M – 08 R04]
16. Design a digital Butterworth filter using T = 1 sec, satisfying the following constraints:
a) Bilinear Transformation method
b) Impulse Invariant method. (16) [N/D – 10 R04]
17. Explain the concept of Bilinear transformation mapping technique with necessary expressions
and sketches. Compare the advantages and disadvantages of this method with that of impulse
invariant method. (8) [A/M – 11 R04]
18. Design a first order Butterworth LPF with 3dB cutoff frequency of 0.2π using Bilinear
transformation. (8) [A/M – 11 R04]
19. Design a digital Butterworth filter using Bilinear transformation (assume T = 1 sec), satisfying
the constraints:
Realize the filter in most convenient form. (16) [N/D – 06 R04]
20. Design a digital Butterworth filter using bilinear transformation (with T = 0.1 sec), satisfying the
constraints:
(16) [M/J – 07 R04]
Department of Electronics and Communication Engineering 8
EC6502 – Principles of Digital Signal Processing V Semester – Question Bank
21. Discuss the steps in the design of IIR filter using Bilinear transformation for any one type of
filter. (8) [N/D – 13 R08]
22. Design a low pass Butterworth digital filter with the following specifications:
WS = 4000, WP = 3000, AP = 3dB, AS = 20dB, T = 0.0001 sec. (16) [M/J – 14 R08]
23. Design a digital second order low – pass Butterworth filter with cut-off frequency 2200 Hz using
Bilinear transformation. Sampling rate is 8000 Hz. (8) [N/D – 12 R08]
REALIZATION USING DIRECT, CASCADE AND PARALLEL FORMS
24. Realize the digital system in cascade form
. (8) [M/J – 13 R08]
25. Derive and draw the direct form-I and direct form-II realization for H(z) = .
(8) [M/J – 12 R08]
26. Derive and draw the direct form-I, direct form-II and cascade form realization of the system
function
(16) [N/D – 11 R08]
27. Derive and draw the direct form-I, direct form-II, cascade and parallel form realization for the
system
(16) [N/D – 10 R08]
28. Convert the following pole-zero IIR filter into a lattice ladder structure.
(16)[N/D – 13 R08]
29. A system is represented by a transfer function H(z) is given by
(i) Does this represent a FIR or IIR filter? Why? (4)
(ii) Give a difference equation realization of this system using direct form I. (6)
(iii) Draw the block diagram for the direct form II canonic realization and give the governing
equations for implementation. (6) [M/J – 14 R08]
30. Determine the cascade form and parallel form implementation of the system governed by the
transfer function
(8) [N/D – 12 R08]
Department of Electronics and Communication Engineering 9
EC6502 – Principles of Digital Signal Processing V Semester – Question Bank
UNIT III – FINITE IMPULSE RESPONSE FILTERS
PART A
SYMMETRIC AND ANTISYMMETRIC FIR FILTERS – LINEAR PHASE FIR FILTERS
1. List out the advantages and disadvantages of FIR filters. [M/J – 13 R08] [A/M – 08 R04]
2. What are symmetric and anti symmetric FIR filters? [M/J – 12 R08]
3. State the properties of FIR filter. [N/D – 13 R08] [N/D – 11 R08][A/M – 11 R08]
4. What is the necessary and sufficient condition for linear phase characteristics in FIR filter?
[A/M – 11 R04]
5. Draw the block diagram representation of FIR system. [N/D – 06 R04]
6. Show that the filter with is a linear phase filter. [M/J – 07 R04]
7. What are the steps involved in the FIR filter design?
8. What is meant by optimum equiripple design criterion? Why is it followed?
9. State the effect of having abrupt discontinuity in frequency response of FIR filters.
[M/J – 14 R08]
DESIGN USING HAMMING, HANNING AND BLACKMANN WINDOWS
10. Write the equations for Hamming window and Blackman window.
[M/J – 13 R08] [N/D – 10 R08]
11. What are the features of FIR filter design using the Kaiser’s approach? [N/D – 12 R08]
12. Define – Gibbs Phenomenon [A/M – 11 R08][M/J – 14 R08] [M/J – 12 R08] [A/M – 10 R08]
13. What are the desirable characteristics of windows? [N/D – 13 R08] [N/D – 11 R08]
14. How is Kaiser window different from other windows? [N/D – 07 R04]
15. What is window function? Why is it necessary?
16. Write the equation for Hanning window function.
17. Write the equation for Bartlett window function.
FREQUENCY SAMPLING METHOD
18. Write the procedure for FIR filter design by frequency sampling method.
REALIZATION OF FIR FILTERS – TRANSVERSAL, LINEAR PHASE AND POLYPHASE
STRUCTURES
19. Draw the direct form implementation of FIR system having difference equation
. [N/D – 12 R08]
20. Determine the transversal structure of the system function
. [N/D – 10 R08]
21. Draw linear phase realization for the system function
. [N/D – 12 R04]
Department of Electronics and Communication Engineering 10
EC6502 – Principles of Digital Signal Processing V Semester – Question Bank
PART B
SYMMETRIC AND ANTISYMMETRIC FIR FILTERS – LINEAR PHASE FIR FILTERS
1. Determine the frequency response of FIR filter defined by
Calculate the phase delay and group delay.
(8) [M/J – 13 R08]
2. Derive the condition for linear phase in FIR filter. (8) [N/D – 09 R04]
3. How are the zeros of FIR filters located? Explain in detail. (7) [N/D – 13 R08]
4. State and explain the properties of FIR filters. State their importance. (8) [M/J – 14 R08]
DESIGN USING HAMMING, HANNING AND BLACKMANN WINDOWS
5. Explain the designing of FIR filters using windows. (16) [A/M – 11 R08]
6. Design an FIR filter with the following desired specifications, using Hanning window with
(16) [M/J – 13 R08]
7. Design an FIR low pass filter having the following specifications using Hanning window.
and N = 7. (16) [M/J – 12 R08]
π π
8. a) The desired response of a low pass filter is
π π
Determine H( ej ) for M = 7 using Hamming window. (8) [A/M – 08 R04] [N/D – 09 R04]
b) Determine the magnitude response of an FIR filter (M =11) and show that the phase and group
delays are constant. (8) [A/M – 08 R04]
9. The desired frequency response of a low pass filter is given by
π π
Determine the filter coefficients hd(n). Compute the
π π
coefficients h(n) of FIR filter using a rectangular window defined by
(8) [N/D – 07 R04]
10. A band reject filter of length 7 is required. The lower and upper cutoff frequencies are 3 kHz and
5 kHz respectively. The sampling frequency is 20 kHz. Determine the filter coefficients using
Hamming window. Assume the filter to be causal. (16) [N/D – 08 R04]
11. A band pass FIR filter of length 7 is required. The lower and upper cutoff frequencies are 3 kHz
and 6 kHz respectively and are intended to be used with the sampling frequency of 24 kHz.
Determine the filter coefficients using rectangular window. Consider the filter to be causal.
(8) [N/D – 10 R04] [M/J – 07 R04]
12. Compare the characteristics of different types of windows used in the design of FIR filter.
(8) [N/D – 10 R04]
Department of Electronics and Communication Engineering 11
EC6502 – Principles of Digital Signal Processing V Semester – Question Bank
13. Design a high pass filter using Blackman window with cutoff frequency of 1.2 radians and N = 7.
Realize the obtained transfer function. (8) [A/M – 11 R04]
14. Design a FIR low pass digital filter approximating the ideal frequency response
π π
π π
using Hamming window method with M = 11. (16) [N/D – 12 R04]
15. Design a high pass filter using Hamming window, with a cut-off frequency of 1.2 radians/sec and
N = 9. (16) [N/D – 06 R04]
16. Design an ideal high pass filter using Hanning window with a frequency response
π π
.
π
Assume N = 11. (16) [N/D – 10 R08] [N/D – 11 R08]
17. Using a rectangular window technique, design a low pass filter with pass band gain of unity gain,
cut-off frequency of 1000Hz and working at a sampling frequency of 5 kHz. The length of the
impulse response should be 7. (9) [N/D 13 R08]
18. Design a digital FIR band- pass filter with lower cut-off frequency 2000 Hz and upper cutoff
frequency 3200 Hz using Hamming window of length N = 7. Sampling rate is 10000 Hz.
(10) [N/D – 12 R08]
FREQUENCY SAMPLING METHOD
19. Explain the design procedure of FIR filter using frequency sampling method.
(16) [M/J – 14 R08] [M/J – 13 R08]
20. Explain the frequency sampling method of FIR filter design.
(8) [M/J – 12 R08] [N/D – 09 R04][N/D – 07 R04][A/M – 11 R04]
21. Determine the coefficients h(n) of a linear phase FIR filter of length M = 15 which has a
symmetric unit sample response and a frequency response that satisfies the condition
(10) [N/D – 10 R08]
22. Design an FIR low pass digital filter by using the frequency sampling method for the following
specifications
Cutoff frequency = 1500Hz
Sampling frequency = 15000Hz
Order of the filter: N = 10
Filter length required L = N + 1 = 11. (16) [N/D – 12 R08]
Department of Electronics and Communication Engineering 12
EC6502 – Principles of Digital Signal Processing V Semester – Question Bank
REALIZATION OF FIR FILTERS – TRANSVERSAL, LINEAR PHASE AND POLYPHASE
STRUCTURES
23. Determine the Direct form realization for the system function
. (8) [M/J – 12 R08]
24. Realize the system function by linear phase FIR structure.
(16) [ A/M – 11 R08]
25. Obtain the linear phase realization of the system function
(6) [N/D – 10 R08]
26. Explain linear phase FIR structures. What are the advantages of such structures?
(8) [M/J – 14 R08]
27. Consider an Fir lattice filter with coefficients ; ; . Determine the
FIR filter coefficients for the direct form structure. (16) [N/D – 13 R08]
28. Explain with neat sketches the implementation of FIR filters in the
(1) Direct form
(2) Lattice form (6) [N/D – 12 R08]
Department of Electronics and Communication Engineering 13
EC6502 – Principles of Digital Signal Processing V Semester – Question Bank
UNIT IV – FINITE WORD LENGTH EFFECTS
PART A
FIXED POINT AND FLOATING POINT NUMBER REPRESENTATIONS – COMPARISON
1. What are the advantages of floating point arithmetic? [N/D – 11 R08]
2. What is meant by fixed point arithmetic? Write an example. [A/M – 11 R08]
3. Distinguish between fixed point arithmetic and floating point arithmetic. [N/D – 10 R04]
4. Represent the fraction (– 9/32) in signed magnitude and in two׳s complement form using 6 bits.
[N/D – 08 R04]
5. Represent 15.75 using fixed point and floating point arithmetic. [A/M – 11 R04]
6. What are the different types of arithmetic operations used in digital system?
7. What is meant by block floating point representation? What are its advantages?
8. How are multiplication and addition carried out in floating point arithmetic?
9. What is saturation arithmetic?
10. Plot the truncation error for sign magnitude and two׳s complement numbers.
11. Represent the fraction 7/8 and –7/8 in sign magnitude, 2׳s complement and 1׳s complement
format.
TRUNCATION AND ROUNDING ERRORS
12. Compare truncation with rounding errors. [M/J – 12 R08]
13. What is meant by truncation? [N/D – 10 R08]
14. Why is rounding preferred over truncation in realizing a digital filter? [M/J – 07 R01]
15. What is meant by rounding?
QUANTIZATION NOISE – DERIVATION FOR QUANTIZATION NOISE POWER
16. What are the two types of quantization employed in a digital system? [M/J – 13 R08]
17. What are the three types of quantization error that occur in a digital system? [A/M – 08 R04]
18. List out the factors degrading the performance of a finite word length digital filter.
[N/D – 08 R04]
19. What is meant by quantization step size?
COEFFICIENT QUANTIZATION ERROR – PRODUCT QUANTIZATION ERROR
OVERFLOW ERROR ROUNDOFF NOISE POWER
20. What is meant by overflow oscillation? [N/D – 11 R08][M/J – 12 R08]
21. What is product quantization error? [M/J – 14 R08] [N/D – 10 R08]
22. What is coefficient quantization error? What are its effects?
23. What do you understand by input quantization error? [N/D – 13 R08]
LIMIT CYCLE OSCILLATIONS DUE TO PRODUCT ROUNDOFF AND OVERFLOW
ERRORS
24. Define – Zero Input Limit Cycle Oscillation [N/D – 12 R08] [A/M – 12 R08][M/J – 13 R08]
25. What is dead band of a filter? [N/D – 12 R08]
26. Explain the meaning of limit cycle oscillator. [A/M – 11 R08]
27. State the methods used to prevent overflow. [N/D – 13 R08]
SIGNAL SCALING
28. State the need for scaling in filter implementation. [M/J – 14 R08]
Department of Electronics and Communication Engineering 14
EC6502 – Principles of Digital Signal Processing V Semester – Question Bank
PART B
FIXED POINT AND FLOATING POINT NUMBER REPRESENTATIONS – COMPARISON
1. Represent the following numbers in floating point format with five bits in mantissa and three bits
in exponent. (8) [M/J – 13 R08]
a) 710
b) 0.2510
c) 110
d) 0.2510
2. Compare floating point arithmetic with fixed point arithmetic.(4) [N/D – 11 R08] [M/J – 12 R08]
TRUNCATION AND ROUNDING ERRORS
3. Discuss the various common methods of quantization. (8)[N/D – 13 R08]
4. Explain the errors due to rounding and truncation. [N/D – 10 R08]
Explain the problems due to round off and truncation in converting a decimal
fraction. (8) [N/D – 10 R08]
Compare the truncation and rounding errors using fixed point and floating point representation.
(8) [M/J – 14 R08]
QUANTIZATION NOISE – DERIVATION FOR QUANTIZATION NOISE POWER
5. What is quantization noise? Derive the expression for quantization noise power.
(12) [M/J – 12 R08]
What is meant by quantization? Derive the expression for the quantization error. [N/D – 12 R08]
Explain the quantization noise and derive the expression for finding quantization noise power.
(8) [N/D – 10 R08]
6. Derive the signal to quantization noise ratio of A/D converter. (6) [M/J – 14 R08]
7. How is the steady state output noise variance calculated? (8) [N/D – 10 R08]
8. Determine the steady state output noise variance due to quantization of input, for the first order
filter . (16)
COEFFICIENT QUANTIZATION ERROR – PRODUCT QUANTIZATION ERROR
OVERFLOW ERROR ROUNDOFF NOISE POWER LIMIT CYCLE OSCILLATIONS DUE
TO PRODUCT ROUNDOFF AND OVERFLOW ERRORS
9. Consider a second order IIR filter with . Explain the effect of
quantization on pole locations of the system when realized in direct form and in cascade form.
Assume b = 3 bits. (10) [N/D – 11 R08]
10. Explain coefficient quantization in IIR filter. (16) [N/D – 12 R08]
11. Draw the product quantization noise model of second order IIR system. (8) [M/J – 13 R08]
12. Find the output round-off noise power for the system having transfer function
H(z) = which is realized in direct and in cascade forms.
Assume word length is 4 bits. (8)
Department of Electronics and Communication Engineering 15
EC6502 – Principles of Digital Signal Processing V Semester – Question Bank
13. Describe the effect of product quantization in cascaded IIR sections, using fixed point arithmetic.
(8) [N/D – 10 R08]
14. How is reduction of product round-off error achieved in digital filters? (8)
(8)[M/J – 14 R08] [A/M –11 R08]
15. Explain the limit cycle oscillations due to product round off and overflow errors.
(16) [N/D – 11 R08] [N/D – 10 R08]
16. How can limit cycle oscillations be prevented? Explain. (8) [N/D – 12 R08]
17. Determine the dead band of the system . Assume 8
bits are used for signal representation. (8) [M/J – 13 R08]
18. Explain the characteristics of zero input limit cycle oscillation, in the system described by the
difference equation with a word length of 3 bits. Determine the
dead band of the filter. (8) [A/M – 11 R08]
19. Explain the characteristics of a limit cycle oscillation, with respect to the system
described by the difference equation
;
and
Determine the dead band range of the system. (10) [M/J – 14 R08]
20. Describe the quantization in floating point realization of IIR digital filters. (16) [N/D –13 R08]
21. Explain the finite word length effects in FIR digital filters. (8)[N/D – 13 R08]
Explain the round off noise in direct form realization of a linear phase FIR filter with relevant
diagrams. (8) [A/M – 11 R08]
Explain the effects of coefficient quantization in FIR filters. (8)[M/J – 14 R08] [A/M –11 R08]
22. Explain the following (16) [M/J – 12 R08]
a) Coefficient quantization error
b) Product quantization error
c) Signal scaling
d) Truncation and Rounding.
SIGNAL SCALING
23. How is signal scaling used to prevent overflow limit cycle in the digital filter implementation?
Explain with an example. (8) [N/D – 11 R08] [N/D – 12 R08] [M/J – 13 R08]
Department of Electronics and Communication Engineering 16
EC6502 – Principles of Digital Signal Processing V Semester – Question Bank
UNIT V – MULTI RATE SIGNAL PROCESSING
PART A
INTRODUCTION TO MULTIRATE SIGNAL PROCESSING
1. What is multirate signal processing? [M/J – 14 R08] [N/D – 11 R08]
2. List out the applications of DSP. [A/M – 11 R08]
3. What is the need for multirate signal processing?
DECIMATION-INTERPOLATION
4. What is anti- imaging filter? [M/J – 13 R08]
5. What is decimation? [N/D – 12 R08] [N/D – 10 R08]
6. Write the expression for the following multirate system. [N/D – 12 R08]
4 24 6
7. What is meant by down sampling and up sampling? [N/D – 11 R08]
8. When is a signal decimated? [A/M – 08 R01]
9. What is meant by interpolation? [A/M – 08 R01]
10. Write the input output relationship for a decimator.
11. Write the input output relationship for an interpolator.
12. What is meant by aliasing?
13. How can aliasing be avoided?
14. For the signal f(t) = 5 cos (5000πt ) + sin2 (3000πt), determine the minimum sampling rate for
recovery without aliasing.
15. Differentiate between anti-aliasing and anti-imaging filters.
16. How is sampling rate converted by a factor I/D?
17. What is the need for decimation? [M/J – 14 R08]
POLYPHASE IMPLEMENTATION OF FIR FILTERS FOR INTERPOLATOR AND
DECIMATOR
18. What are called polyphase filters? [M/J – 12 R08]
19. Compare efficient transversal structure with direct form structure.
20. List out the methods of designing FIR decimator and interpolator.
MULTISTAGE IMPLEMENTATION OF SAMPLING RATE CONVERSION
21. Draw the schematic for sampling rate conversion by a factor I/D. Draw the spectrum of output
sequence. [N/D – 05 R01]
22. Give the steps in multistage sampling rate converter design. [N/D – 13 R08]
23. What is meant by sampling rate conversion?
APPLICATIONS OF MULTIRATE SIGNAL PROCESSING
24. List out the applications of multirate DSP. [N/D – 13 R08][M/J – 12 R08][M/J – 13 R08]
25. What is echo cancellation? [A/M – 11 R08]
26. What is sub-band coding? [N/D – 10 R08]
27. List out the types of frequency domain coding. [M/J – 08 R01]
28. What is Quadrature Mirror Filter (QMF)? [N/D – 03 R01]
29. What are the sections of QMF?
Department of Electronics and Communication Engineering 17
EC6502 – Principles of Digital Signal Processing V Semester – Question Bank
PART B
DECIMATION-INTERPOLATION
1. A signal x(n) is given by x(n) = {0, 1, 2, 3, 4, 5, 6, 0, 1, 2, 3, ...} (8) [M/J – 13 R08]
a) Obtain the decimated signal with a factor of 2.
b) Obtain the interpolated signal with a factor of 2.
2. How does the sampling rate increase by an integer factor I? Derive the input-output
relationship in both time and frequency domains. (16) [M/J – 13 R08]
3. For the multirate system shown in figure, write the relation between x(n) and y(n).
(16) [N/D – 11 R08]
4. Explain the concepts of decimation and interpolation of discrete time signals.
(16) [A/M – 11 R08] [M/J – 12 R08]
5. a) Explain sampling rate conversion by a rational factor and derive input-output relation in
both time and frequency domain. (8) [N/D – 12 R08]
b) Explain the design of a narrow band filter using sampling rate conversion. (8) [N/D – 12 R08]
6. Write notes on the following:
i. Over sampling A/D converter
ii. Over sampling D/A converter. (10) [M/J – 14 R08]
POLYPHASE IMPLEMENTATION OF FIR FILTERS FOR INTERPOLATOR AND
DECIMATOR
7. Explain the efficient transversal structure. (16) [N/D – 11 R08]
8. Explain the polyphase structure of decimator and interpolator.
(16) [N/D – 13 R08] [M/J – 14 R08] [N/D – 10 R08]
MULTISTAGE IMPLEMENTATION OF SAMPLING RATE CONVERSION
9. Explain the multistage implementation of sampling rate conversion with a block diagram.
(8) [M/J – 12 R08][M/J – 13 R08][N/D – 13 R08]
APPLICATIONS OF MULTIRATE SIGNAL PROCESSING
10. Explain the procedure to implement digital filter bank in multirate signal processing.
(16) [N/D – 10 R08]
11. Explain sub-band coding in detail. (8) [N/D – 12 R08][M/J – 12 R08]
12. List out the applications of multirate signal processing. (6)[M/J – 14 R08][A/M – 11 R08]
13. How is DSP used for speech processing? (8) [A/M – 11 R08]
14. How can various sound effects be generated using DSP? Explain in detail. (10) [A/M – 11 R08]
15. Explain the implementation steps in speech coding using transform coding.
(8)[N/D – 13 R08]
Department of Electronics and Communication Engineering 18
You might also like
- GE8151 Python Programming - Unit I Question Bank With Sample CodeDocument25 pagesGE8151 Python Programming - Unit I Question Bank With Sample CodeN.Vivekananthamoorthy100% (1)
- Lecture # 11 ELENDocument17 pagesLecture # 11 ELENPhD EENo ratings yet
- Operational Amplifier (Op-Amp)Document26 pagesOperational Amplifier (Op-Amp)Md ArifNo ratings yet
- Unit 1Document108 pagesUnit 1RAHUL R : ECE DEPTNo ratings yet
- 0 4th Sem LIC Full Notes (6 Chapters) by Arunkumar G, Lecturer Dept. of E&C, STJIT RanebennurDocument520 pages0 4th Sem LIC Full Notes (6 Chapters) by Arunkumar G, Lecturer Dept. of E&C, STJIT RanebennurAmarjeet Kumar100% (5)
- Measuring instruments: definitions and applicationsDocument25 pagesMeasuring instruments: definitions and applicationsShivaniNo ratings yet
- CH6403Document7 pagesCH6403NikylNo ratings yet
- POWER AMPLIFIERS: KEY TYPES AND APPLICATIONSDocument51 pagesPOWER AMPLIFIERS: KEY TYPES AND APPLICATIONSRiyaz Khan PathanNo ratings yet
- Module 5Document65 pagesModule 5Shilpa ShridharNo ratings yet
- Chapter 04 PDFDocument30 pagesChapter 04 PDFRAHIM KNo ratings yet
- ELEX1105 Lecture NotesDocument192 pagesELEX1105 Lecture Notesalen GacicNo ratings yet
- MOSFET-Internal Capacitances PDFDocument11 pagesMOSFET-Internal Capacitances PDFJayanth Sriranga100% (1)
- GE8151 Python Programming - Question Bank and Example ProgramsDocument13 pagesGE8151 Python Programming - Question Bank and Example ProgramsN.VivekananthamoorthyNo ratings yet
- Source Transformation and Super Position Theorem PDFDocument13 pagesSource Transformation and Super Position Theorem PDFVasu RamNo ratings yet
- Understanding electromagnetic compatibility through coupling mechanismsDocument10 pagesUnderstanding electromagnetic compatibility through coupling mechanismsPriya RaviNo ratings yet
- DC Material PDFDocument149 pagesDC Material PDFCHARANNo ratings yet
- GE8151 Python Programming Unit 2 Question Bank With Example CodeDocument37 pagesGE8151 Python Programming Unit 2 Question Bank With Example CodeN.VivekananthamoorthyNo ratings yet
- Linearity and SuperpositionDocument24 pagesLinearity and SuperpositionkrishneelNo ratings yet
- Circuit Theory (Eceg-1081) : Addis Ababa University Addis Ababa Institute of Technology (Aait)Document27 pagesCircuit Theory (Eceg-1081) : Addis Ababa University Addis Ababa Institute of Technology (Aait)AbcdNo ratings yet
- GE8151 NotesDocument118 pagesGE8151 NotesriyaNo ratings yet
- Feedback AmplifiersDocument4 pagesFeedback Amplifiersbetoy00No ratings yet
- EMTL Unit 0Document51 pagesEMTL Unit 0ganesh4u_pNo ratings yet
- Linear Circuit Analysis (ELEN-1100)Document24 pagesLinear Circuit Analysis (ELEN-1100)PhD EENo ratings yet
- Linear Circuit Analysis (ELEN-1100) : Lecture # 3: Kirchhoff's Law and Series Parallel CombinationsDocument21 pagesLinear Circuit Analysis (ELEN-1100) : Lecture # 3: Kirchhoff's Law and Series Parallel CombinationsPhD EE100% (1)
- Ec 8071-Cognitive RadioDocument12 pagesEc 8071-Cognitive Radiokavitha saravananNo ratings yet
- PP Innovative Features of Scripting LanguagesDocument20 pagesPP Innovative Features of Scripting Languages014 CSE Devamruth AG100% (1)
- Control System Lecture PlanDocument3 pagesControl System Lecture PlanGulzar AhamdNo ratings yet
- SATELLITE LINK DESIGNDocument123 pagesSATELLITE LINK DESIGNvenugopalNo ratings yet
- CNTLDocument31 pagesCNTLAkanksha DixitNo ratings yet
- CAD & Design Flow: Motivation: Microelectronics Design EfficiencyDocument18 pagesCAD & Design Flow: Motivation: Microelectronics Design EfficiencyJubin JainNo ratings yet
- LIC Lab Manual Anna UniversityDocument83 pagesLIC Lab Manual Anna Universityankitha rajanNo ratings yet
- Dual Axis Solar Tracker With CleanerDocument6 pagesDual Axis Solar Tracker With CleanerIJRASETPublicationsNo ratings yet
- Ec8452 Ec-Ii Unit-1Document122 pagesEc8452 Ec-Ii Unit-1Ananda Sailesh KNo ratings yet
- Electronics Analog OPAMPDocument51 pagesElectronics Analog OPAMPPrashant SachdevNo ratings yet
- Wave Shaping CircuitsDocument15 pagesWave Shaping CircuitsParesh SawantNo ratings yet
- Op-Amp Circuits GuideDocument21 pagesOp-Amp Circuits GuideVarun BishtNo ratings yet
- Experiment 6 Implementation of LP Fir Filter For A Given SequenceDocument25 pagesExperiment 6 Implementation of LP Fir Filter For A Given SequenceSrinivas SamalNo ratings yet
- 8086 Microprocessor ArchitectureDocument31 pages8086 Microprocessor ArchitectureLeeza AnandNo ratings yet
- B. Tech BooksDocument3 pagesB. Tech BooksDoon ValyNo ratings yet
- Vtu 6TH Sem Cse Computer Networks 2 Notes 10CS64Document72 pagesVtu 6TH Sem Cse Computer Networks 2 Notes 10CS64EKTHATIGER633590100% (8)
- Transistor Frequency Response and Miller EffectDocument35 pagesTransistor Frequency Response and Miller Effectjamesearl_cubillas100% (1)
- Ec2203-Unit IV Memory Devices Digital ElectronicsDocument38 pagesEc2203-Unit IV Memory Devices Digital ElectronicsKarthikeyan_Go_952567% (6)
- 8085 Lab ManualDocument58 pages8085 Lab ManualShah JainamNo ratings yet
- CPE223-Signals and Systems Lab ManualDocument135 pagesCPE223-Signals and Systems Lab ManualMuhammad Hamza TariqNo ratings yet
- EE-211 Circuit Analysis: Dr. Hadeed Ahmed SherDocument28 pagesEE-211 Circuit Analysis: Dr. Hadeed Ahmed SherHadeedAhmedSherNo ratings yet
- Electronic Circuits Lab Manual Clippers and AmplifiersDocument29 pagesElectronic Circuits Lab Manual Clippers and AmplifiersAshwath NadahalliNo ratings yet
- Ec8452 Ec-Ii Unit-2Document103 pagesEc8452 Ec-Ii Unit-2Ananda Sailesh KNo ratings yet
- Ec8501 Digital CommunicationDocument50 pagesEc8501 Digital CommunicationAnkur rathaurNo ratings yet
- LICA Lecture Notes by A.mounikaDocument77 pagesLICA Lecture Notes by A.mounikaAnonymous 4u5XkWGONo ratings yet
- LectureNotes Antennas DR - SerkanaksoyDocument13 pagesLectureNotes Antennas DR - SerkanaksoyRahil HusainNo ratings yet
- EMI Control Techniques for Electronics SystemsDocument10 pagesEMI Control Techniques for Electronics SystemsYuvaraja50% (2)
- Notes On Network Analysis (Based On R19 Regulation) - by Shaik Gouse BashaDocument255 pagesNotes On Network Analysis (Based On R19 Regulation) - by Shaik Gouse BashaShaik Gouse Basha100% (1)
- DCOM Lab ManualDocument38 pagesDCOM Lab ManualGaurav Kalra0% (1)
- UNIT5-Ground Wave Propagation PDFDocument44 pagesUNIT5-Ground Wave Propagation PDFRameshbabu SadineniNo ratings yet
- Electrical Overstress (EOS): Devices, Circuits and SystemsFrom EverandElectrical Overstress (EOS): Devices, Circuits and SystemsNo ratings yet
- One Mark Questions:: EC431 Digital Signal Processing Unit-IIDocument3 pagesOne Mark Questions:: EC431 Digital Signal Processing Unit-IIUday Kiran MuddanaNo ratings yet
- Department of Electronics and Communication Engineering: Digital Signal ProcessingDocument25 pagesDepartment of Electronics and Communication Engineering: Digital Signal ProcessingSETNHILNo ratings yet
- Ec6502-Principles of Digital Signal Processing: Assignment - 1Document1 pageEc6502-Principles of Digital Signal Processing: Assignment - 1Ajay GanesanNo ratings yet
- Discrete Wavelet Transform: A Signal Processing ApproachFrom EverandDiscrete Wavelet Transform: A Signal Processing ApproachRating: 5 out of 5 stars5/5 (2)
- Ex05 - Question Paper Adaic - ModelDocument2 pagesEx05 - Question Paper Adaic - ModelshankarNo ratings yet
- Ex06 - Answer Key Adaic Te-2Document8 pagesEx06 - Answer Key Adaic Te-2shankarNo ratings yet
- KONGUNADU COLLEGE OF ENGINEERING AND TECHNOLOGY TERMINAL EXAMINATION-I ANALYSIS AND DESIGN OF ANALOG INTEGRATED CIRCUITSDocument2 pagesKONGUNADU COLLEGE OF ENGINEERING AND TECHNOLOGY TERMINAL EXAMINATION-I ANALYSIS AND DESIGN OF ANALOG INTEGRATED CIRCUITSshankarNo ratings yet
- Kongunadu College of Engineering and TechnologyDocument2 pagesKongunadu College of Engineering and TechnologyshankarNo ratings yet
- NBA Modified RF&MW LPDocument4 pagesNBA Modified RF&MW LPshankarNo ratings yet
- M.E. Applied Electronics - R2017Document47 pagesM.E. Applied Electronics - R2017Mr.R.Ragumadhavan ecestaffNo ratings yet
- KONGUNADU COLLEGE M.E ECE I/I TIME TABLE 2018-19Document1 pageKONGUNADU COLLEGE M.E ECE I/I TIME TABLE 2018-19shankarNo ratings yet
- Design of Efficient Class-E Power Amplifiers For Short-Distance CommunicationsDocument11 pagesDesign of Efficient Class-E Power Amplifiers For Short-Distance CommunicationsshankarNo ratings yet
- Introduction To MATLABDocument36 pagesIntroduction To MATLABViju JigajinniNo ratings yet
- MATLAB BasicsDocument24 pagesMATLAB BasicsshankarNo ratings yet
- Zero Diagonal Property Symmetry Property Unitary Property Phase Shift PropertyDocument5 pagesZero Diagonal Property Symmetry Property Unitary Property Phase Shift PropertyshankarNo ratings yet
- Ada Syllabus 2013Document1 pageAda Syllabus 2013shankarNo ratings yet
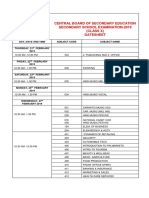
- Central Board of Secondary Education Secondary School Examination-2019 (Class X) DatesheetDocument4 pagesCentral Board of Secondary Education Secondary School Examination-2019 (Class X) DatesheetPriyanka SharmaNo ratings yet
- Adaic TT 2016Document2 pagesAdaic TT 2016shankarNo ratings yet
- Ec6802 Wireless NetworksDocument1 pageEc6802 Wireless NetworksBritto Ebrington AjayNo ratings yet
- Kongunadu College of Engineering and Technology, ThourpattiDocument1 pageKongunadu College of Engineering and Technology, ThourpattishankarNo ratings yet
- Digital Signal Processing Introduction PartDocument13 pagesDigital Signal Processing Introduction Partshankar100% (1)
- Unit 1 Ada 2014Document22 pagesUnit 1 Ada 2014shankarNo ratings yet
- CH 3 - FeedbackDocument54 pagesCH 3 - FeedbackshankarNo ratings yet
- HTTPDocument2 pagesHTTPshankarNo ratings yet
- RF&MW M 1Document2 pagesRF&MW M 1shankarNo ratings yet
- WN Unit1 and Unit5Document1 pageWN Unit1 and Unit5shankar0% (1)
- Ada Syllabus 2013Document1 pageAda Syllabus 2013shankarNo ratings yet
- Unit V: Time Varying Fields and Maxwell'S EquationsDocument12 pagesUnit V: Time Varying Fields and Maxwell'S EquationsshankarNo ratings yet
- MultiplierDocument16 pagesMultipliershankarNo ratings yet
- HTTPDocument2 pagesHTTPshankarNo ratings yet
- Unit 1 Adsd KncetDocument46 pagesUnit 1 Adsd KncetshankarNo ratings yet
- AP9212Document7 pagesAP9212shankarNo ratings yet
- Chap4 ActiveFilter (2012-IsMAIL)Document59 pagesChap4 ActiveFilter (2012-IsMAIL)Aya AmirNo ratings yet
- EXPERIMENT 12: Butterworth Digital LPF: If ElseDocument4 pagesEXPERIMENT 12: Butterworth Digital LPF: If ElseappuamreddyNo ratings yet
- Passive Filter Low Pass - Google SearchDocument1 pagePassive Filter Low Pass - Google SearchAlejandroNo ratings yet
- ECE 408 Computer Assignment #5 Parks-Mcclellan AlgorithmDocument3 pagesECE 408 Computer Assignment #5 Parks-Mcclellan AlgorithmLuis MessaNo ratings yet
- Butterworth Filter Design With A Low Pass ButterworthDocument10 pagesButterworth Filter Design With A Low Pass ButterworthPeter MossNo ratings yet
- ELEG270 Lecture 13 SE Online-1Document28 pagesELEG270 Lecture 13 SE Online-1Saied Aly SalamahNo ratings yet
- FIR Digital Filter DesignDocument3 pagesFIR Digital Filter Designjomer_juan14No ratings yet
- Experment Butterworth FilterDocument6 pagesExperment Butterworth FilterSayantan RoyNo ratings yet
- Experiment No. 7 Name of The Experiment: RC Frequency ResponseDocument8 pagesExperiment No. 7 Name of The Experiment: RC Frequency ResponseMitrayosna MishraNo ratings yet
- UAF42Document3 pagesUAF42pichon84No ratings yet
- Project Twin T Notch Active FilterDocument4 pagesProject Twin T Notch Active FilterVirag ParekhNo ratings yet
- Designing Sharp Cut-Off Filters at Very Low FrequenciesDocument12 pagesDesigning Sharp Cut-Off Filters at Very Low Frequencieslizhi0007No ratings yet
- Biquad Filter PDFDocument5 pagesBiquad Filter PDFpcjoshi02No ratings yet
- Operator Adjustable Equalizers OverviewDocument14 pagesOperator Adjustable Equalizers OverviewJohnNo ratings yet
- Microwave FiltersDocument25 pagesMicrowave FiltersSyafiqah YazidNo ratings yet
- V1 Nexus Template SpreadsheetDocument299 pagesV1 Nexus Template SpreadsheetJabir JabirNo ratings yet
- Getting Back To Basics: Filter Terminology: Technically SpeakingDocument2 pagesGetting Back To Basics: Filter Terminology: Technically SpeakingSlardarRadralsNo ratings yet
- Band-Pass Filter On GNU RadioDocument11 pagesBand-Pass Filter On GNU RadioRakesh S K100% (1)
- Design Linear Phase FIR FiltersDocument30 pagesDesign Linear Phase FIR FiltersHafizuddin AliNo ratings yet
- Question Papper Code: 11332: B.E./B.Tech. Degree Examination, May/June 2012 Fifth SemesterDocument3 pagesQuestion Papper Code: 11332: B.E./B.Tech. Degree Examination, May/June 2012 Fifth SemesterMaddy TrichyNo ratings yet
- Bandstop Filters and The Bainter Topology: by Bonnie C. BakerDocument5 pagesBandstop Filters and The Bainter Topology: by Bonnie C. Bakerpaoki01No ratings yet
- Digital FiltersDocument39 pagesDigital Filtersseaker143100% (1)
- NTL Assignment 2Document2 pagesNTL Assignment 2srinivasanvinod429100% (2)
- Raised Cosine FilterDocument4 pagesRaised Cosine Filterneverdielv2No ratings yet
- 5 FILTER PassiveDocument29 pages5 FILTER PassiveLian Ai ChenNo ratings yet
- Upsampling and Downsampling ExplainedDocument24 pagesUpsampling and Downsampling ExplainedRitwick RanjanNo ratings yet
- Design FIR and IIR Filters in MatlabDocument12 pagesDesign FIR and IIR Filters in Matlabmailme4121No ratings yet
- DCRF&uO 2017 TEMA.03Document38 pagesDCRF&uO 2017 TEMA.03NadiaNo ratings yet
- Course Plan - Circuits & Networks (BME)Document9 pagesCourse Plan - Circuits & Networks (BME)MATHANKUMAR.SNo ratings yet
- Purwanchal University LEVEL: B. E. (Electronics & Communication) SUBJECT: BEG337EC, Filter Design. Time: 03:00 Hrs Pass Marks: 32Document10 pagesPurwanchal University LEVEL: B. E. (Electronics & Communication) SUBJECT: BEG337EC, Filter Design. Time: 03:00 Hrs Pass Marks: 32miraj tamrakarNo ratings yet