You might also like
- IGT Game King 044 Video CTRL Board Schematics (757-044-10)Document24 pagesIGT Game King 044 Video CTRL Board Schematics (757-044-10)Turko Alejandro50% (2)
- 906 & 908 Electrical System Compact Wheel Loader: Electrical Schematic Symbols and DefinitionsDocument2 pages906 & 908 Electrical System Compact Wheel Loader: Electrical Schematic Symbols and Definitionsait mimouneNo ratings yet
- 902, 906, & 908 Compact Wheel Loader Electrical System: Machine Harness Connector and Component LocationsDocument2 pages902, 906, & 908 Compact Wheel Loader Electrical System: Machine Harness Connector and Component Locationsait mimouneNo ratings yet
- TH 360Document2 pagesTH 360Milorad ZelenovicNo ratings yet
- 322B L Excavator Electrical System: Electrical Schematic Symbols and DefinitionsDocument2 pages322B L Excavator Electrical System: Electrical Schematic Symbols and Definitionsgabriel palacios100% (3)
- Toyota A750 RWD 5-Speed Transmission ManualDocument4 pagesToyota A750 RWD 5-Speed Transmission ManualNoel Alejandro Cordova Rangel100% (1)
- Master Mods Volume 1Document76 pagesMaster Mods Volume 1John "BiggyJ" Dumas83% (6)
- JUG0260 Guia Proyectos Electronic Lab ENDocument22 pagesJUG0260 Guia Proyectos Electronic Lab ENVacutza Nebuna0% (1)
- Interface Lab ReportDocument8 pagesInterface Lab ReportSharfuddin ZishanNo ratings yet
- American Traction Systems: 2000HP Locomotive Diesel Electric Propulsion SystemDocument12 pagesAmerican Traction Systems: 2000HP Locomotive Diesel Electric Propulsion SystemBala RajuNo ratings yet
- Figure 22-66-00-12500-00-A / SHEET 1/1 - General Architecture On A/C AllDocument1 pageFigure 22-66-00-12500-00-A / SHEET 1/1 - General Architecture On A/C AllNikolay RomadanovNo ratings yet
- RENR6719RENR6719-02 - SIS Diagrama ElectricoDocument2 pagesRENR6719RENR6719-02 - SIS Diagrama ElectricoCEVegaONo ratings yet
- 330BL Serie 6DR ElectricoDocument2 pages330BL Serie 6DR ElectricojulianmataNo ratings yet
- Study the characteristics of an AC servomotorDocument12 pagesStudy the characteristics of an AC servomotorsatya prakashNo ratings yet
- Fluke 92b Specifications Spec SheetDocument14 pagesFluke 92b Specifications Spec SheetMehmet Serdar TekeNo ratings yet
- MomentumDocument19 pagesMomentumAlejandro MarinNo ratings yet
- CATDrawing - A 0Document1 pageCATDrawing - A 0Cindy Lorena G LancherosNo ratings yet
- Technical Service Information: 1996 & Later Dodge/Chrysler Vehicles With 41Te/42Le TransaxlesDocument4 pagesTechnical Service Information: 1996 & Later Dodge/Chrysler Vehicles With 41Te/42Le TransaxlesStephany castroNo ratings yet
- Machine Harness Connector and Component Locations: 320C Excavator Electrical SystemDocument2 pagesMachine Harness Connector and Component Locations: 320C Excavator Electrical Systemjose luisNo ratings yet
- Cat 14h MotorgraderDocument2 pagesCat 14h MotorgraderAshraf m aliNo ratings yet
- Pages From JVC CH-X470 - SMDocument4 pagesPages From JVC CH-X470 - SMpepejoakiNo ratings yet
- Amber Kinetics 125kW Flywheel System Generic Drawing SetDocument7 pagesAmber Kinetics 125kW Flywheel System Generic Drawing SetFrancis SalongaNo ratings yet
- Repair Manual Troubleshooting GuideDocument20 pagesRepair Manual Troubleshooting GuideabdessNo ratings yet
- 320C PDFDocument2 pages320C PDFedi100% (1)
- A3c Electrical Flight Control System B1Document1 pageA3c Electrical Flight Control System B1kpilNo ratings yet
- 320C Excavator Electrical System: Electrical Schematic Symbols and DefinitionsDocument2 pages320C Excavator Electrical System: Electrical Schematic Symbols and DefinitionsDiego Orlando Santos BuitragoNo ratings yet
- Qeg Original Setup W Feedback - XPDocument1 pageQeg Original Setup W Feedback - XPGanugio MirianiNo ratings yet
- 793D 1Document4 pages793D 1Nicole SmithNo ratings yet
- Atom Incu I Service Manual & Parts List P4Document4 pagesAtom Incu I Service Manual & Parts List P4Diego DiazNo ratings yet
- SIT-DW-LCP-GR3-W001 LCP-001 Schematic Diagram - Rev.A IFADocument6 pagesSIT-DW-LCP-GR3-W001 LCP-001 Schematic Diagram - Rev.A IFAArifin Jr.No ratings yet
- Control Desk-Wagon TipplerDocument9 pagesControl Desk-Wagon TipplerShishram ChoudharyNo ratings yet
- Electrical Schematic Symbols and Definitions: Machine Harness Connector and Component LocationsDocument2 pagesElectrical Schematic Symbols and Definitions: Machine Harness Connector and Component Locationsjicrgz7998No ratings yet
- Blok DiagramDocument1 pageBlok DiagramCelino DataNo ratings yet
- M/S AMTEK Capacity Estimation for Fork Rod Assembly ProductionDocument6 pagesM/S AMTEK Capacity Estimation for Fork Rod Assembly ProductionNeeraj KatariaNo ratings yet
- 4004R (Simplex Panel)Document8 pages4004R (Simplex Panel)oki121No ratings yet
- 3-Phase Brushless DC Motor Controller/Driver With Linear Current Control and Power Dmos OutputsDocument8 pages3-Phase Brushless DC Motor Controller/Driver With Linear Current Control and Power Dmos OutputsHAITHAMNo ratings yet
- SLD GSS106 B - R0Document1 pageSLD GSS106 B - R0emisa.tech.officeNo ratings yet
- Preliminary: Revision HistoryDocument48 pagesPreliminary: Revision HistoryElnino HartonoNo ratings yet
- Service Manual Buses: Wiring Diagram B11R, Universe, D11CDocument107 pagesService Manual Buses: Wiring Diagram B11R, Universe, D11Cmarcos.lopes36291861No ratings yet
- Data Sheet: Fluke Scopemeter Series Iib Selection GuideDocument14 pagesData Sheet: Fluke Scopemeter Series Iib Selection GuideFirdaus HanipahNo ratings yet
- 24H Motor Grader Electrical System: Electrical Schematic Symbols and DefinitionsDocument2 pages24H Motor Grader Electrical System: Electrical Schematic Symbols and Definitionsjose luis Cortés martinezNo ratings yet
- Total Assembly Final DeliverableDocument4 pagesTotal Assembly Final DeliverableFradj TriplexNo ratings yet
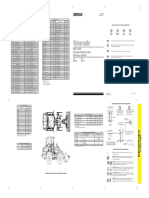
- 777D Off Highway Truck: Service Training MalagaDocument16 pages777D Off Highway Truck: Service Training MalagamanuelNo ratings yet
- ELECTRICAL LOAD LIST FOR SUBSTATION 6Document1 pageELECTRICAL LOAD LIST FOR SUBSTATION 6Harun Al-RasyidNo ratings yet
- HLD Cutler Hammner - SC 5653 9319940501Document1 pageHLD Cutler Hammner - SC 5653 9319940501Juan Alberto Amaya HurtadoNo ratings yet
- Technical Presentation SLDDocument109 pagesTechnical Presentation SLDJarolh Enrique Leiva Zapata100% (1)
- Cat 320b Electrical. EschematichDocument2 pagesCat 320b Electrical. EschematichNavarro NayraNo ratings yet
- Avt-P16002 Ver2Document9 pagesAvt-P16002 Ver2David HernandezNo ratings yet
- XkmaDocument1 pageXkmaAnonymous ItzBhUGoiNo ratings yet
- AW60-40LE DespieceDocument3 pagesAW60-40LE DespieceJorge Hernandez Villeda0% (1)
- SPBC III Gaa26800kx 001Document20 pagesSPBC III Gaa26800kx 001thomasprogalvaoNo ratings yet
- Ripper Lift Cylinder LHDocument1 pageRipper Lift Cylinder LHaduytama349No ratings yet
- Tecnica Plasma 18-31 PDFDocument20 pagesTecnica Plasma 18-31 PDFсергей васяновичNo ratings yet
- Servo Transmission d10 TDocument1 pageServo Transmission d10 TMed Ekah100% (1)
- Machine Harness Connector and Component Locations: Electrical System 320C ExcavatorDocument2 pagesMachine Harness Connector and Component Locations: Electrical System 320C ExcavatorYudi setiawanNo ratings yet
- MC33390Document16 pagesMC33390bettinemed2023No ratings yet
- Serv1790 Slid PDFDocument56 pagesServ1790 Slid PDFIngeniero ProyectosNo ratings yet
- ATA 79 ENG MCD InspectionDocument5 pagesATA 79 ENG MCD Inspectionanarko arsipelNo ratings yet
- New Master Plan of Jabodetabek Railway: A-Nehashi@jarts - Or.jpDocument16 pagesNew Master Plan of Jabodetabek Railway: A-Nehashi@jarts - Or.jpRizki Fajar NovantoNo ratings yet
- Jurnal Alifah Shofarisa 1310050123Document13 pagesJurnal Alifah Shofarisa 1310050123Rizki Fajar NovantoNo ratings yet
- 50c PDFDocument43 pages50c PDFRizki Fajar NovantoNo ratings yet
- Bombardier Transportation CountryBrochure Germany en PDFDocument20 pagesBombardier Transportation CountryBrochure Germany en PDFRizki Fajar NovantoNo ratings yet
- 50c PDFDocument43 pages50c PDFRizki Fajar NovantoNo ratings yet
- Testing GNSS Receivers For Railway Use PDFDocument14 pagesTesting GNSS Receivers For Railway Use PDFRizki Fajar NovantoNo ratings yet
- Protectionism Online Internet Censorship and International Trade Law PDFDocument19 pagesProtectionism Online Internet Censorship and International Trade Law PDFRizki Fajar NovantoNo ratings yet
- Caf EnglishDocument4 pagesCaf EnglishRizki Fajar NovantoNo ratings yet
- MPP Magnetic Ticket PT KCIDocument32 pagesMPP Magnetic Ticket PT KCIRizki Fajar NovantoNo ratings yet
- Operational Policy on Financing GuideDocument27 pagesOperational Policy on Financing GuideKNo ratings yet
- m2069 en PDFDocument9 pagesm2069 en PDFRizki Fajar NovantoNo ratings yet
- DYF WEB X UNI 001 01 - Presentation - PTFE - PDFDocument22 pagesDYF WEB X UNI 001 01 - Presentation - PTFE - PDFRizki Fajar NovantoNo ratings yet
- 740111Document16 pages740111Rizki Fajar NovantoNo ratings yet
- Alstom Health Hub PDFDocument2 pagesAlstom Health Hub PDFRizki Fajar NovantoNo ratings yet
- 6364605Document15 pages6364605Rizki Fajar NovantoNo ratings yet
- Interoperability In: Progress With Railway The European UnionDocument50 pagesInteroperability In: Progress With Railway The European UnionRizki Fajar NovantoNo ratings yet
- SR High Speed Rail en PDFDocument103 pagesSR High Speed Rail en PDFRizki Fajar NovantoNo ratings yet
- Scherp EIA Round Table CopenhagenDocument13 pagesScherp EIA Round Table CopenhagenRizki Fajar NovantoNo ratings yet
- Quality Infrastructure Preparation and TransactionDocument6 pagesQuality Infrastructure Preparation and TransactionRizki Fajar NovantoNo ratings yet
- BRI Briefing Paper English PDFDocument26 pagesBRI Briefing Paper English PDFRizki Fajar Novanto100% (1)
- A Totally Different View On Signals: The Colour Light Signals of Vialis Railway SystemsDocument2 pagesA Totally Different View On Signals: The Colour Light Signals of Vialis Railway SystemsRizki Fajar NovantoNo ratings yet
- A Look at Technological Challenges Facing Africa: Thi-Mai TRAN Managing Director MoroccoDocument21 pagesA Look at Technological Challenges Facing Africa: Thi-Mai TRAN Managing Director MoroccoRizki Fajar NovantoNo ratings yet
- Drawpointconstructionimprovementatdeepmilllevelzonedmlzptfreeportindonesiausingsixsigmamethod PDFDocument9 pagesDrawpointconstructionimprovementatdeepmilllevelzonedmlzptfreeportindonesiausingsixsigmamethod PDFRizki Fajar NovantoNo ratings yet
- Trainguard PTC Safe and Efficient Train Operation - Siemens PDFDocument4 pagesTrainguard PTC Safe and Efficient Train Operation - Siemens PDFRizki Fajar NovantoNo ratings yet
- Trainguard Basic Indusi en PDFDocument4 pagesTrainguard Basic Indusi en PDFRizki Fajar NovantoNo ratings yet
- Surelock: Points Drive System Points Drive SystemDocument2 pagesSurelock: Points Drive System Points Drive SystemRizki Fajar NovantoNo ratings yet
- ABB Traction Transformers - General Brochure - EN PDFDocument4 pagesABB Traction Transformers - General Brochure - EN PDFRizki Fajar NovantoNo ratings yet
- The Impact of Indusi Technology On Disruption of Interoperability in European Rail TrafficDocument10 pagesThe Impact of Indusi Technology On Disruption of Interoperability in European Rail TrafficRizki Fajar NovantoNo ratings yet
- OS&D Claim Form: Customer InformationDocument1 pageOS&D Claim Form: Customer InformationRizki Fajar NovantoNo ratings yet
- 02 Quite Success PDFDocument2 pages02 Quite Success PDFRizki Fajar NovantoNo ratings yet
- Bandwidth Enhancement of Microstrip Patch Antenna For 5.8 GHZ by Optimized Feed OffsetDocument4 pagesBandwidth Enhancement of Microstrip Patch Antenna For 5.8 GHZ by Optimized Feed OffsetbhawnaNo ratings yet
- Charging System PDFDocument19 pagesCharging System PDFSSEVERAiTJUGANo ratings yet
- Training ReportDocument114 pagesTraining ReportMuhammad JahenzebNo ratings yet
- Kilowatt Labs Sirius-Technical Data Sheet-1000-48-B-1C-TM-A-GDocument2 pagesKilowatt Labs Sirius-Technical Data Sheet-1000-48-B-1C-TM-A-GIvanNo ratings yet
- 7.5 KW Vorttek DatasheetDocument2 pages7.5 KW Vorttek DatasheetcarrascohnNo ratings yet
- اعطال الموتوراتDocument65 pagesاعطال الموتوراتmoathNo ratings yet
- ProceedingsDocument226 pagesProceedingsAnkur Pathak100% (2)
- T494D476K016ATDocument24 pagesT494D476K016ATfeltofsnakeNo ratings yet
- Practice 12 Dynamic Logic 2011 12 ADocument5 pagesPractice 12 Dynamic Logic 2011 12 AKamleshNo ratings yet
- Electrical System Design GuidelinesDocument125 pagesElectrical System Design Guidelinescarlosmarciosfreitas100% (1)
- Installation and user guide for PLATINUM invertersDocument90 pagesInstallation and user guide for PLATINUM invertersElyes MbarekNo ratings yet
- Rectron Semiconductor Mini Bridge Rectifier Technical SpecificationDocument2 pagesRectron Semiconductor Mini Bridge Rectifier Technical SpecificationMubashirriskNo ratings yet
- Sizing, Design, and Installation of An Isolated Wind-Photovoltaic Hybrid Power System With Battery Storage For Laboratory General Illumination in Afyonkarahisar, TurkeyDocument11 pagesSizing, Design, and Installation of An Isolated Wind-Photovoltaic Hybrid Power System With Battery Storage For Laboratory General Illumination in Afyonkarahisar, TurkeyhadushNo ratings yet
- Guide to Special Energy Meter Data Processing in North East IndiaDocument93 pagesGuide to Special Energy Meter Data Processing in North East IndiaKrishna Venkataraman100% (1)
- A VHF-UHF Television Turret Tuner-ujCDocument15 pagesA VHF-UHF Television Turret Tuner-ujCjulio perezNo ratings yet
- Corrosion Rate MeasurementsDocument27 pagesCorrosion Rate MeasurementsedwinNo ratings yet
- High Speed Can Bus Transceiver: DescriptionDocument9 pagesHigh Speed Can Bus Transceiver: Descriptionsweety987No ratings yet
- Data Center Smart Li-Ion Battery Solution: SmartliDocument2 pagesData Center Smart Li-Ion Battery Solution: SmartliBenny S Putra100% (1)
- Om On280Document38 pagesOm On280yonasNo ratings yet
- A3 PlanDocument3 pagesA3 PlanAlvinMaghirangNo ratings yet
- Liebert Gxt3 208V, 5000-10,000VA, 6000RTL630: User ManualDocument52 pagesLiebert Gxt3 208V, 5000-10,000VA, 6000RTL630: User ManualMasterC3012No ratings yet
- 1.5V Double Layer Gans Cell (DLGC) : Alekz SystemDocument10 pages1.5V Double Layer Gans Cell (DLGC) : Alekz Systemhallo1234100% (3)
- Motor Management and Control Devices Simocode ProDocument1 pageMotor Management and Control Devices Simocode ProArief RakhmadNo ratings yet
- Solar Turbines Taurus 65 Data SheetDocument2 pagesSolar Turbines Taurus 65 Data SheetLuis SanguinettiNo ratings yet
- Fluke Energy Saving SeminarDocument116 pagesFluke Energy Saving SeminarJoey Espinosa Asean Engr100% (1)
- WEG Synchronous Alternators G Plus and Ag10 Line North America 50074626 Brochure EnglishDocument48 pagesWEG Synchronous Alternators G Plus and Ag10 Line North America 50074626 Brochure Englishbayu dewantoNo ratings yet
- Bosch EVAX System - High-RiseDocument6 pagesBosch EVAX System - High-RiseKito TomNo ratings yet