You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Testing of Semifinished Products of Thermoplastics Bases - Indications Directive DVS 2201-1Document4 pagesTesting of Semifinished Products of Thermoplastics Bases - Indications Directive DVS 2201-1OscarNo ratings yet
- Recruitment of Sales Executives TLs ASM Processing Staff BFSLDocument6 pagesRecruitment of Sales Executives TLs ASM Processing Staff BFSLTopRankersNo ratings yet
- Sel CV I Ae Agri 2k17 ListDocument2 pagesSel CV I Ae Agri 2k17 Listkannanmech87No ratings yet
- TNPSC GKDocument415 pagesTNPSC GKkannanmech87100% (2)
- பட்டா மாற்றத்திற்கான விண்ணப்படிவம்Document3 pagesபட்டா மாற்றத்திற்கான விண்ணப்படிவம்Bakrudeen Ali AhamedNo ratings yet
- Nano TechnologyDocument10 pagesNano Technologykannanmech87100% (1)
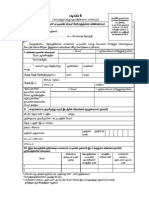
- Form 8 AtamilDocument3 pagesForm 8 AtamilVijayabaskaran SundhareshwarNo ratings yet
- Valla DuraiDocument2 pagesValla Duraikannanmech87No ratings yet
- AutoCAD 2013Document264 pagesAutoCAD 2013panosscribd100% (1)
- Alternative Fuels & Bio - FuelsDocument8 pagesAlternative Fuels & Bio - Fuelskannanmech87No ratings yet
- ME 3320 Kinematics Dynamics Machinery Course ObjectivesDocument1 pageME 3320 Kinematics Dynamics Machinery Course Objectiveskannanmech87No ratings yet
- Dept May2011gfDocument506 pagesDept May2011gfkannanmech87No ratings yet
- KSR Institute For Engineering and Technology Department of Mechanical Engineering Mentoring Data SheetDocument2 pagesKSR Institute For Engineering and Technology Department of Mechanical Engineering Mentoring Data Sheetkannanmech87No ratings yet
- NEW507179சூலை 2012 மாத இதழ்Document26 pagesNEW507179சூலை 2012 மாத இதழ்David MayNo ratings yet
- இருப்பிட சான்றிதழுக்கான விண்ணப்பபடிவம்Document1 pageஇருப்பிட சான்றிதழுக்கான விண்ணப்பபடிவம்Bakrudeen Ali Ahamed0% (1)
- Model TestDocument21 pagesModel Testanand_dec84No ratings yet
- TNPSC Model TamilDocument22 pagesTNPSC Model Tamilபிரகாஷ் பாரிNo ratings yet
- TNPSC Group 4 Model Question Paper 2Document20 pagesTNPSC Group 4 Model Question Paper 2training2jobs100% (1)
- குடும்ப அட்டை பெறுவதற்கான விண்ணப்ப படிவம்Document2 pagesகுடும்ப அட்டை பெறுவதற்கான விண்ணப்ப படிவம்Bakrudeen Ali AhamedNo ratings yet
- ST Forest Dwellers Act 2006 T 0Document3 pagesST Forest Dwellers Act 2006 T 0kannanmech87No ratings yet
- Form 6 TamilDocument7 pagesForm 6 Tamilapi-276452640No ratings yet
- Answer All The Questions (9X2 18 Marks) Answer All The Questions (9X2 18 Marks)Document1 pageAnswer All The Questions (9X2 18 Marks) Answer All The Questions (9X2 18 Marks)kannanmech87No ratings yet
- TN Fiscal Responsibility Act SummaryDocument9 pagesTN Fiscal Responsibility Act Summarykannanmech87No ratings yet
- PhysResInt 10 341016Document10 pagesPhysResInt 10 341016kannanmech87No ratings yet
- TNPSC Group 2 Model Question and AnswerDocument20 pagesTNPSC Group 2 Model Question and Answeruit@No ratings yet
- Dom QBDocument8 pagesDom QBkannanmech87No ratings yet
- Validation of A Vapour Compression Refrigeration System Design ModelDocument7 pagesValidation of A Vapour Compression Refrigeration System Design Modelkannanmech87No ratings yet
- Answer All The Questions (9X2 18 Marks) Answer All The Questions (9X2 18 Marks)Document1 pageAnswer All The Questions (9X2 18 Marks) Answer All The Questions (9X2 18 Marks)kannanmech87No ratings yet
- RBI & IMF CompensationDocument3 pagesRBI & IMF Compensationkannanmech87No ratings yet
- Jarme 3 1 2010Document8 pagesJarme 3 1 2010kannanmech87No ratings yet
- Validation of A Vapour Compression Refrigeration System Design ModelDocument7 pagesValidation of A Vapour Compression Refrigeration System Design Modelkannanmech87No ratings yet
- Molecular Cell Biology Lodish 7th Edition Solutions ManualDocument8 pagesMolecular Cell Biology Lodish 7th Edition Solutions ManualmarisorbornewwssNo ratings yet
- Tutorial - Lecture 3 SolutionsDocument10 pagesTutorial - Lecture 3 SolutionsBastián Olfos MárquezNo ratings yet
- PermutationDocument3 pagesPermutationKhairuddin MuhamadNo ratings yet
- Matrix Inversion Note in Mathematics MagazineDocument2 pagesMatrix Inversion Note in Mathematics Magazinejuan carlos molano toroNo ratings yet
- Pronet Plus User ManualDocument159 pagesPronet Plus User ManualJJ LópezNo ratings yet
- Ch01Document33 pagesCh01sakali aliNo ratings yet
- Kollidon 30 Technical InformationDocument10 pagesKollidon 30 Technical InformationhomarearisugawaNo ratings yet
- Medical Oxygen Cylinder Filling System User ManualDocument57 pagesMedical Oxygen Cylinder Filling System User ManualAldo Tolaba QuirogaNo ratings yet
- Live load and wind pressure on sloping roofsDocument11 pagesLive load and wind pressure on sloping roofsAbel BerhanemeskelNo ratings yet
- What Is XRF ?: Prepared by Lusi Mustika SariDocument34 pagesWhat Is XRF ?: Prepared by Lusi Mustika SariBayuNo ratings yet
- Properties of Common Liquids Solids and Foods 2Document2 pagesProperties of Common Liquids Solids and Foods 2Šhëënà de LeonNo ratings yet
- Is 4410 9 1982 PDFDocument25 pagesIs 4410 9 1982 PDFSameer Singh PatelNo ratings yet
- Barrels & Actions by Harold HoffmanDocument238 pagesBarrels & Actions by Harold HoffmanNorm71% (7)
- Correct AnswerDocument120 pagesCorrect Answerdebaprasad ghosh100% (1)
- Compact GSM II: Installation and Application ManualDocument22 pagesCompact GSM II: Installation and Application ManualleonardseniorNo ratings yet
- The Pauli Exclusion PrincipleDocument33 pagesThe Pauli Exclusion Principle3449336893No ratings yet
- 12.6 Perform An Activity - Measuring The Critical Angle For Various MediaDocument2 pages12.6 Perform An Activity - Measuring The Critical Angle For Various MediaRajeshri SoniNo ratings yet
- Essential Statistics For The Behavioral Sciences 1st Edition Privitera Solutions ManualDocument7 pagesEssential Statistics For The Behavioral Sciences 1st Edition Privitera Solutions Manualspinifexcandock8zf100% (26)
- Viscosity Vs ConsistencyDocument6 pagesViscosity Vs Consistencysontakke manmathNo ratings yet
- Design of Weirs and BarragesDocument42 pagesDesign of Weirs and BarragesDivyaSlp100% (2)
- Pioneer Deh-1300 1350 1390mpDocument71 pagesPioneer Deh-1300 1350 1390mpJorge LavezziNo ratings yet
- Homework1 PDFDocument3 pagesHomework1 PDFYuanhao LiuNo ratings yet
- Nov. AbwDocument50 pagesNov. Abwjbyarkpawolo70No ratings yet
- Binder Modul WMS 10Document52 pagesBinder Modul WMS 10sandhiakhmadNo ratings yet
- Cics Class 05Document18 pagesCics Class 05HarithaNo ratings yet
- Calentador Catalitico de TuberíasDocument2 pagesCalentador Catalitico de TuberíasDavid RomeroNo ratings yet
- Cork Properties Capabilities and ApplicationsDocument22 pagesCork Properties Capabilities and ApplicationsVijay AnandNo ratings yet
- Podar International School Chinchwad STD Xi - (I Unit Test) Subject: Computer Science Date: 8-9-2020 Marks: 40Document3 pagesPodar International School Chinchwad STD Xi - (I Unit Test) Subject: Computer Science Date: 8-9-2020 Marks: 40Shriniwas KulkarniNo ratings yet
- The BCA (1) 23Document36 pagesThe BCA (1) 23Aurobind DasNo ratings yet