You might also like
- Quadruino RobotDocument17 pagesQuadruino RobotJuan SNo ratings yet
- Validadores de billetes F30Document15 pagesValidadores de billetes F30Nelson OrjuelaNo ratings yet
- Robin Manual v1Document26 pagesRobin Manual v1Rommel LoayzaNo ratings yet
- Actividad 4 InvestigacionDocument11 pagesActividad 4 InvestigacionFrancisco Javier Bañuelos MonteroNo ratings yet
- Manual de Ensamble y Funcionamiento de Robot SumoDocument21 pagesManual de Ensamble y Funcionamiento de Robot SumoISAAC FERNANDEZ ALARCONNo ratings yet
- Creación de La Topología Del CapítuloDocument6 pagesCreación de La Topología Del CapítuloBrayan Agudelo OdNo ratings yet
- Actividad 3 InterrupcionesDocument9 pagesActividad 3 InterrupcionesHector QuiñonesNo ratings yet
- AIND Víctor FernándezDocument13 pagesAIND Víctor FernándezVíctor FernándezNo ratings yet
- Motor A Pasos de Izquierda y Derecha y Dos Puhs BotonDocument14 pagesMotor A Pasos de Izquierda y Derecha y Dos Puhs Botonjuan sebastian perez martinez100% (1)
- Manual de Usuario PIC PROGRAMMER Electronilab - CoDocument22 pagesManual de Usuario PIC PROGRAMMER Electronilab - CoBosch Fbc FbcNo ratings yet
- Laboratorio #7Document13 pagesLaboratorio #7LUIS CARLOS CASTILLO CURONo ratings yet
- Encoder Con 18F2550 (Entrenadora NeoTeo) NeoteoDocument11 pagesEncoder Con 18F2550 (Entrenadora NeoTeo) NeoteoCarlos Edgar Buitron QuispeNo ratings yet
- Guia LDmicroDocument12 pagesGuia LDmicroSeninNo ratings yet
- Obturador Mecánico Con Arduino DIYDocument28 pagesObturador Mecánico Con Arduino DIYMiriam EsteveNo ratings yet
- Cómo Hacer Un SumobotDocument20 pagesCómo Hacer Un SumobotJose Neira Galvez100% (1)
- Robot Seguidor de LineaDocument7 pagesRobot Seguidor de LineaJavier GuapiNo ratings yet
- Entrenador Pic 16f84a - 16f628aDocument10 pagesEntrenador Pic 16f84a - 16f628aGabriela ONo ratings yet
- Capítulo 2Document13 pagesCapítulo 2ptinizarayNo ratings yet
- PICKIT CLONE 2 v3.0: depurador y programador de microcontroladores PIC y dsPICDocument4 pagesPICKIT CLONE 2 v3.0: depurador y programador de microcontroladores PIC y dsPICSkate RadiactiveNo ratings yet
- Cuaderno de Informes - Semana 3Document16 pagesCuaderno de Informes - Semana 3anthony portuguez arcosNo ratings yet
- Seguidor de LineaDocument16 pagesSeguidor de Linea'edgaar MoraleesNo ratings yet
- ILERDDS Manual SpanishDocument22 pagesILERDDS Manual SpanishDiego Leonardo DuarteNo ratings yet
- PinguinoDocument66 pagesPinguinoPablo CárdenasNo ratings yet
- Practica 4Document6 pagesPractica 4lalofreudNo ratings yet
- Vaivén Con EmergenciaDocument17 pagesVaivén Con EmergenciaDiego GonzalezNo ratings yet
- Construya Un Tablero de Circuito de Transistor para Controlar El Control Remoto Del Aire Acondicionado Con ArduinoDocument14 pagesConstruya Un Tablero de Circuito de Transistor para Controlar El Control Remoto Del Aire Acondicionado Con ArduinoclaudiaNo ratings yet
- Laboratorio # 2Document23 pagesLaboratorio # 2Hernan Mardoqueo Hercules Rivera100% (1)
- Muestreo de Modulación PCM. INFORME DE PRÁCTICA 1.Document5 pagesMuestreo de Modulación PCM. INFORME DE PRÁCTICA 1.Ronald HueraNo ratings yet
- Como Crear Un Robot de Sumo Autónomo y BaratoDocument9 pagesComo Crear Un Robot de Sumo Autónomo y BaratoMay Rodyn Cuba de la CruzNo ratings yet
- Actividad 3Document11 pagesActividad 3Hector QuiñonesNo ratings yet
- Capacimetro e inductometro PICDocument7 pagesCapacimetro e inductometro PICz3xa5347No ratings yet
- Robot Evita Obstaculos NOVIEMBREDocument13 pagesRobot Evita Obstaculos NOVIEMBREBerenice SunemNo ratings yet
- Como Hacer Un Reloj Digital Con PicDocument13 pagesComo Hacer Un Reloj Digital Con PicJesus AndersonNo ratings yet
- Automatización Invernadero MblockDocument22 pagesAutomatización Invernadero MblockDamian Mastroberti50% (2)
- Encoder Mecánico de Un MauseDocument7 pagesEncoder Mecánico de Un MauseDaniel Cristian Negretty Huarayo100% (2)
- Cuadro Audi FISDocument32 pagesCuadro Audi FISLuixcbNo ratings yet
- Guia P.A (Fase I) - Física Ii-Ascensor ElectricoDocument13 pagesGuia P.A (Fase I) - Física Ii-Ascensor ElectricoEliana Game ChalenNo ratings yet
- Berreta Sintetizador de Luz - CERODocument11 pagesBerreta Sintetizador de Luz - CEROCeroNo ratings yet
- Paso 5 Componente Practico - Edinson Medina - 309696 - 15Document26 pagesPaso 5 Componente Practico - Edinson Medina - 309696 - 15Edinson Medina RiveraNo ratings yet
- Descripción Del Proyecto Iotawatt Mod by JJDocument6 pagesDescripción Del Proyecto Iotawatt Mod by JJforospocoyoNo ratings yet
- Proyecto Manual de Usuario Carro Seguidor de LineaDocument41 pagesProyecto Manual de Usuario Carro Seguidor de Lineajose medina100% (1)
- Construye un multímetro digital con Arduino y LCDDocument8 pagesConstruye un multímetro digital con Arduino y LCDMarco AncoNo ratings yet
- 05 Robot Seguidor LineaDocument8 pages05 Robot Seguidor LineaJorge Paredes MonesNo ratings yet
- Electrical Color Tester EspDocument45 pagesElectrical Color Tester EspJuan IntNo ratings yet
- 2019-1 Semana 10V2 - Guia Laboratorio de Señales - Introducción A Microcontroladores IIDocument16 pages2019-1 Semana 10V2 - Guia Laboratorio de Señales - Introducción A Microcontroladores IIJohan Steven GNo ratings yet
- Manual SumobotDocument37 pagesManual SumoboterikaNo ratings yet
- Como Hacer Un Reloj Digital Con PicDocument14 pagesComo Hacer Un Reloj Digital Con PicEduardo100% (1)
- Guia Rapida Banco de Pruebas de Computadoras Automotrices Modelo Mark 40 - BDocument3 pagesGuia Rapida Banco de Pruebas de Computadoras Automotrices Modelo Mark 40 - BFernanda ChavezNo ratings yet
- PRACTICA Regulador Electronico AlternadorDocument23 pagesPRACTICA Regulador Electronico AlternadorBatis BattissNo ratings yet
- Frecuencímetro Con Micro ControladorDocument10 pagesFrecuencímetro Con Micro Controladoralfredo de la hozNo ratings yet
- Proyecto de DigitalesDocument13 pagesProyecto de DigitalesFernando GYNo ratings yet
- Informe Del AscensorDocument10 pagesInforme Del Ascensorradamanthys45157111No ratings yet
- Informe Seguidor de LineaDocument12 pagesInforme Seguidor de LineaVinicio TenorioNo ratings yet
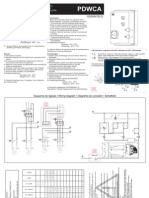
- WEG Instrucoes de Instalacao Pdwca 10000654785 Guia de Instalacao Portugues BRDocument2 pagesWEG Instrucoes de Instalacao Pdwca 10000654785 Guia de Instalacao Portugues BRPaulo Luiz FrançaNo ratings yet
- Circuitos Electronicos para Aser XXDocument41 pagesCircuitos Electronicos para Aser XXJuan Fco Rocha Paredes100% (1)
- Robot bPED Madera Guia de Iniciacion PDFDocument12 pagesRobot bPED Madera Guia de Iniciacion PDFSebastian SNo ratings yet
- Reporte Control RemotoDocument22 pagesReporte Control Remotojimy_bravoNo ratings yet
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosFrom EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosRating: 5 out of 5 stars5/5 (5)
- Ejercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiFrom EverandEjercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiRating: 5 out of 5 stars5/5 (1)
- 100 circuitos de shields para arduino (español)From Everand100 circuitos de shields para arduino (español)Rating: 3.5 out of 5 stars3.5/5 (3)
- CATALOGO Informatica INDUSTRIALDocument7 pagesCATALOGO Informatica INDUSTRIALEdgar Eucebio Mamani ApazaNo ratings yet
- Coronavirus para NiñosDocument11 pagesCoronavirus para NiñosYago Jesus100% (2)
- Convocatoria Mujercitas - 2020Document5 pagesConvocatoria Mujercitas - 2020Edgar Eucebio Mamani ApazaNo ratings yet
- SEÑALESDocument21 pagesSEÑALESEdgar Eucebio Mamani ApazaNo ratings yet
- Call For Sponsors ArduinoDay 2019Document1 pageCall For Sponsors ArduinoDay 2019Edgar Eucebio Mamani ApazaNo ratings yet
- Catalogo de Precios ComponentesDocument6 pagesCatalogo de Precios ComponentesEdgar Eucebio Mamani ApazaNo ratings yet
- Medidas de Capacitores Electrolíticos más utilizadosDocument1 pageMedidas de Capacitores Electrolíticos más utilizadosFedericoNo ratings yet
- Domotica para La Comunidad PDFDocument2 pagesDomotica para La Comunidad PDFEdgar Eucebio Mamani ApazaNo ratings yet
- Conceptos B Sicos 2018Document24 pagesConceptos B Sicos 2018Edgar Eucebio Mamani ApazaNo ratings yet
- Manual PythonDocument40 pagesManual PythonJose Ricardo MarraNo ratings yet
- Full Stack SB2019Document5 pagesFull Stack SB2019Edgar Eucebio Mamani ApazaNo ratings yet
- ASM 68kDocument6 pagesASM 68kEdgar Eucebio Mamani ApazaNo ratings yet
- Tema 8 - Pps PDFDocument76 pagesTema 8 - Pps PDFEdgar Eucebio Mamani ApazaNo ratings yet
- Desarrollo en Python SB2019Document6 pagesDesarrollo en Python SB2019VaNe SsaNo ratings yet
- PWM AdcDocument22 pagesPWM AdcRolan Tineo QuispeNo ratings yet
- Convocatoria EnsambleDocument1 pageConvocatoria EnsambleEdgar Eucebio Mamani ApazaNo ratings yet
- Crear - Un - Proyecto - en - MPLAB - X V2.01 PDFDocument27 pagesCrear - Un - Proyecto - en - MPLAB - X V2.01 PDFJuan Antonio Caamaño CrucesNo ratings yet
- ASM 68kDocument6 pagesASM 68kEdgar Eucebio Mamani ApazaNo ratings yet
- Proyectos de GradoDocument39 pagesProyectos de GradoEdgar Eucebio Mamani Apaza100% (2)
- Datasheet Pic18f4550 EspañolDocument234 pagesDatasheet Pic18f4550 EspañolPedro Ronald Nieves100% (4)
- 14 MC68K-Introduccion ItisDocument12 pages14 MC68K-Introduccion ItisEdgar Eucebio Mamani ApazaNo ratings yet
- Impresic3b3n 3d para Profesores 08-10-2017Document24 pagesImpresic3b3n 3d para Profesores 08-10-2017GeviNo ratings yet
- BurbujasDocument5 pagesBurbujasEdgar Eucebio Mamani ApazaNo ratings yet
- ASM 68kDocument26 pagesASM 68kEdgar Eucebio Mamani ApazaNo ratings yet
- 14 MC68K-Introduccion ItisDocument12 pages14 MC68K-Introduccion ItisEdgar Eucebio Mamani ApazaNo ratings yet
- ASM 68kDocument26 pagesASM 68kEdgar Eucebio Mamani ApazaNo ratings yet
- Vera No 2018Document1 pageVera No 2018Edgar Eucebio Mamani ApazaNo ratings yet
- Impresic3b3n 3d para Profesores 08-10-2017Document24 pagesImpresic3b3n 3d para Profesores 08-10-2017GeviNo ratings yet
- Guía montaje robot BrivoiDocument30 pagesGuía montaje robot BrivoiEdgar Eucebio Mamani ApazaNo ratings yet
- El Relajo Jorge PortillaDocument10 pagesEl Relajo Jorge PortillaAslam Gastòn HernàndezNo ratings yet
- Tema 18 - Población Técnicas de Muestreo y Muestra - EjemplosDocument7 pagesTema 18 - Población Técnicas de Muestreo y Muestra - EjemplosINGRID CAROLINA SANTISTEBAN TUÑOQUENo ratings yet
- Programa Amadeus66Document2 pagesPrograma Amadeus66JavoDeejayNo ratings yet
- Práctica 4: CondensadorDocument10 pagesPráctica 4: CondensadorLuisa Fernanda Marin TrianaNo ratings yet
- Informe de JunioDocument4 pagesInforme de Juniojilmer lopez reucheNo ratings yet
- Manual de Ergonomia ForestalDocument475 pagesManual de Ergonomia Forestalfalelita100% (1)
- DL Manual - Com Manual HTP y FamiliaDocument40 pagesDL Manual - Com Manual HTP y FamiliaAlicia escolante roblesNo ratings yet
- Informe #6 Pka Azul de BromotimolDocument6 pagesInforme #6 Pka Azul de BromotimolValee MartiinezNo ratings yet
- Láser vaginal - Manual de usuarioDocument20 pagesLáser vaginal - Manual de usuarioHeimuller Cruz100% (1)
- Garcia Canclini: Que Es Lo Popular?Document8 pagesGarcia Canclini: Que Es Lo Popular?vane maz100% (4)
- Capítulo 01 - Estadística Relevante Del SEINDocument34 pagesCapítulo 01 - Estadística Relevante Del SEINmishelNo ratings yet
- Reseteo de Contador EPSPON L210Document6 pagesReseteo de Contador EPSPON L210Jose GuardiolaNo ratings yet
- Pag 11-19. Manual de Intervención AuditivaDocument53 pagesPag 11-19. Manual de Intervención AuditivaPamela BadillaNo ratings yet
- Análisis PersonalDocument3 pagesAnálisis PersonalMarco MartínezNo ratings yet
- Punch ListDocument1 pagePunch ListTomas VelasquezNo ratings yet
- MatricesDocument4 pagesMatricesneferetNo ratings yet
- Mera - Mateo Construcciones 3 P1Document7 pagesMera - Mateo Construcciones 3 P1lily loor c.No ratings yet
- Prueba de Hipotesis de Chi CuadradoDocument49 pagesPrueba de Hipotesis de Chi CuadradoEriksen Mallma MoránNo ratings yet
- Diseño de Una Vivienda Unifamiliar Utilizando Plástico Reciclado, en La Tablada en El Distrito de Villa María Del TriunfoDocument174 pagesDiseño de Una Vivienda Unifamiliar Utilizando Plástico Reciclado, en La Tablada en El Distrito de Villa María Del TriunfoAlex Percy Antonio Manriquez PaisigNo ratings yet
- Arte, Ciencia y NaturalezaDocument5 pagesArte, Ciencia y NaturalezaJulio CruzNo ratings yet
- Exportacion de Fibra de Vicuña A EE - UUDocument33 pagesExportacion de Fibra de Vicuña A EE - UUAngelica Alave100% (1)
- Clase 9 - 1er Ley Termodinámica-TrabajoDocument33 pagesClase 9 - 1er Ley Termodinámica-Trabajo0502022009No ratings yet
- Informe Del Grupo de Trabajo Sobre El Marco para La Realización de Una Evaluación Independiente Del Desempeño Del Sistema Nacional de Salud Frente A La Pandemia Covid-19Document15 pagesInforme Del Grupo de Trabajo Sobre El Marco para La Realización de Una Evaluación Independiente Del Desempeño Del Sistema Nacional de Salud Frente A La Pandemia Covid-19VozpopuliNo ratings yet
- Proyecto de Catedra Analisis y Diseño de Sistemas IDocument7 pagesProyecto de Catedra Analisis y Diseño de Sistemas IMel EvequozNo ratings yet
- Universidad de Los AndesDocument33 pagesUniversidad de Los AndesRuddy DúxNo ratings yet
- Las Radios Comunitarias y Las Radios LibresDocument4 pagesLas Radios Comunitarias y Las Radios LibresRafael Teddy Picker TejadoNo ratings yet
- Unidad 1 - Plan Semanal - 1er Período - 5to SecundariaDocument10 pagesUnidad 1 - Plan Semanal - 1er Período - 5to SecundariaJohan CarrascoNo ratings yet
- Adulto MayorDocument5 pagesAdulto MayorJACK EDINSON PORTILLA RODRIGUEZNo ratings yet
- Talleres Guia 5Document10 pagesTalleres Guia 5daya sotoNo ratings yet
- DEROGACIÓN Y APLICACIÓN DE LEY - Por TerminarDocument24 pagesDEROGACIÓN Y APLICACIÓN DE LEY - Por TerminarIRVIN JONEL BRENIS TENORIONo ratings yet